Изобретение относится к животноводству, в частности к автоматизированным доильным установкам животных.
Цель изобретения - повышение производительности установки.
Поставленная цель достигается тем. что конвейерная доильная установка, содержащая основание с подвижной платформой, установленные на последней доильные станки с манипуляторами с держателями доильных стаканов и систему управления процессом доения, снабжена механизмом перемещения с выходным звеном, системой управления механизмом перемещения, узлом регистрации, содержащим датчик наличия животного, датчик положения вымени и датчик положения соска, датчик положения вымени установлен на выходном звене механизма перемещения, а датчик положения соска установлен на доильном стакане, при этом механизм перемещения, система управления процессом доения и датчик положения вымени связаны с системой управления механизмом перемещения, датчик наличия животного связан с системой управления механизмом перемещения и системой управления процессом доения, датчик положения соска связан с системой управления процессом доения . Кроме того, датчик положения вымени выполнен в виде пластины с сенсорными ячейками.
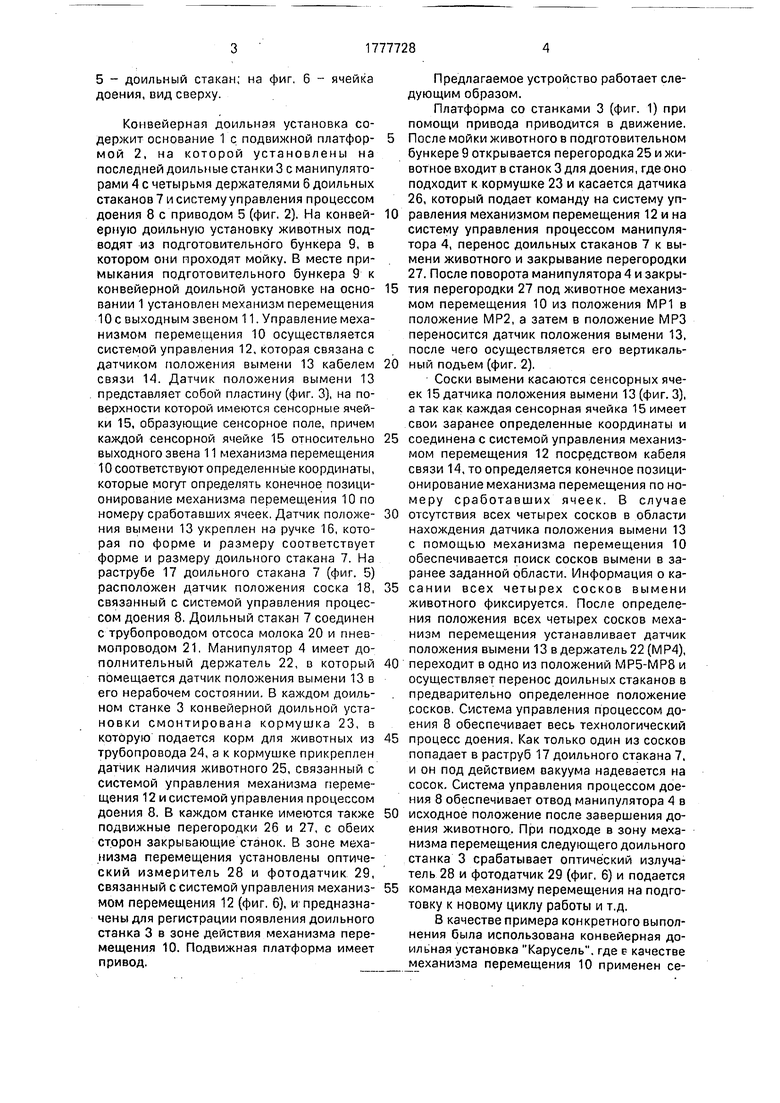
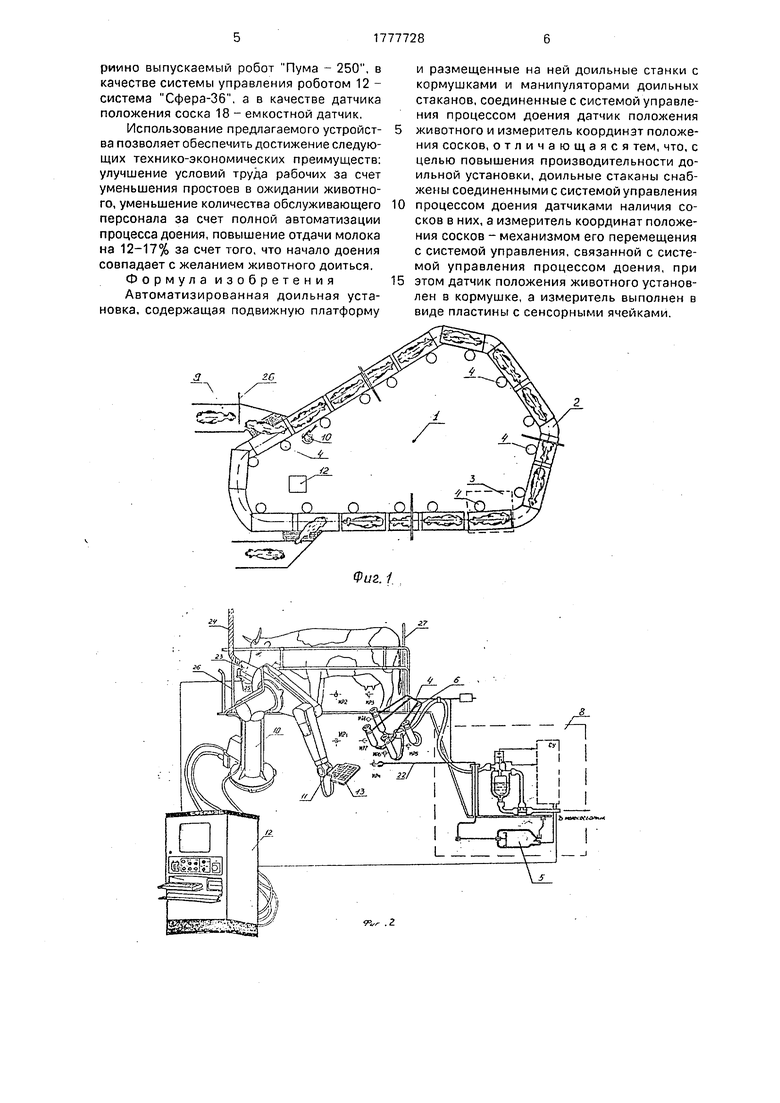
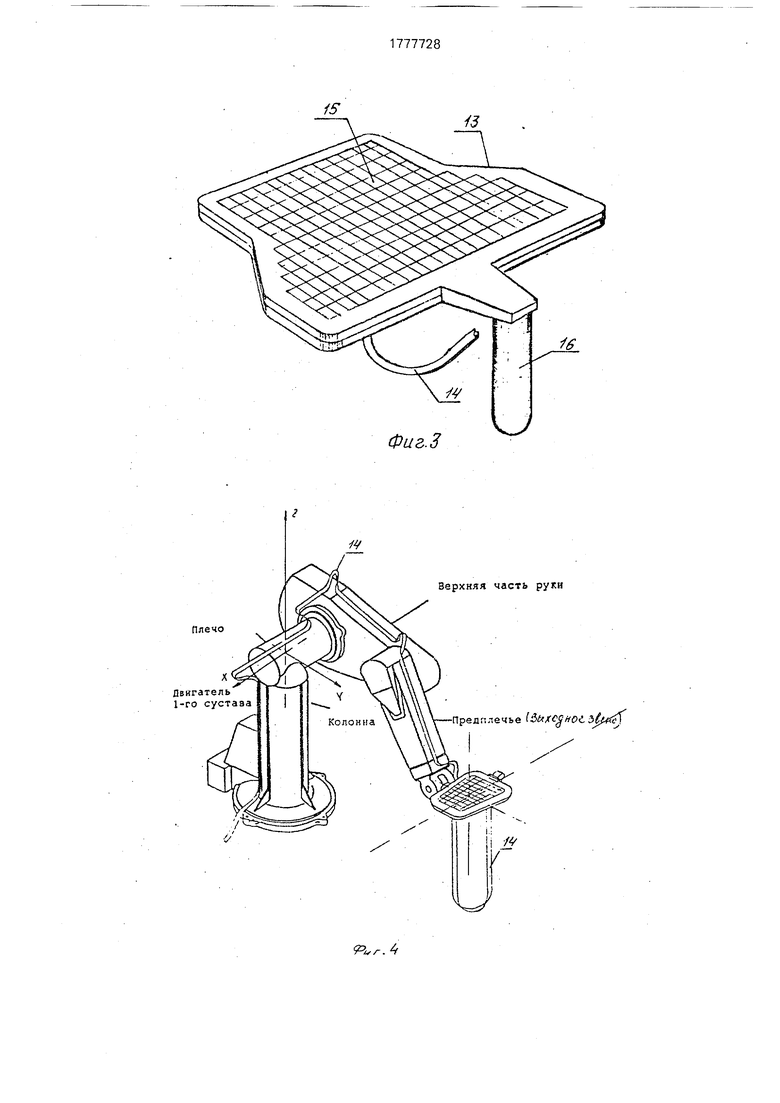
На фиг. 1 изображен доильный комплекс Карусель, общий вид; на фиг. 2 - ячейка доения, вид сбоку; на фиг. 3 - датчик положения вымени, общий вид; на фиг. 4 - механизм перемещения, общий вид; на фиг.
VI VI VI
VI
го со
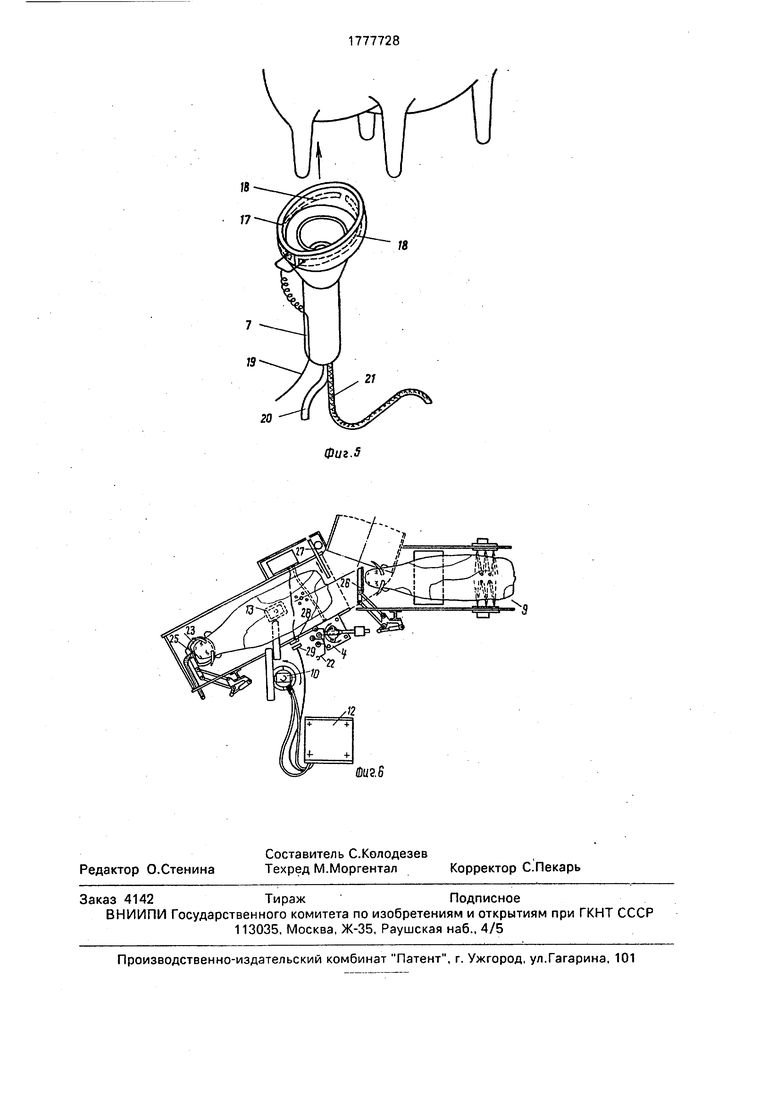
5 - доильный стакан; на фиг. 6 - ячейка доения, вид сверху.
Конвейерная доильная установка содержит основание 1 с подвижной платформой 2, на которой установлены на последней доильные станки 3 с манипуляторами 4 с четырьмя держателями 6 доильных стаканов 7 и систему управления процессом доения 8 с приводом 5 (фиг, 2). На конвейерную доильную установку животных подводят из подготовительного бункера 9, в котором они проходят мойку. В месте примыкания подготовительного бункера 9 к конвейерной доильной установке на основании 1 установлен механизм перемещения 10с выходным звеном 11. Управление механизмом перемещения 10 осуществляется системой управления 12, которая связана с датчиком положения вымени 13 кабелем связи 14. Датчик положения вымени 13 представляет собой пластину (фиг. 3), на поверхности которой имеются сенсорные ячейки 15, образующие сенсорное поле, причем каждой сенсорной ячейке 15 относительно выходного звена 11 механизма перемещения 10 соответствуют определенные координаты, которые могут определять конечное позиционирование механизма перемещения 10 по номеру сработавших ячеек. Датчик положения вымени 13 укреплен на ручке 16, которая по форме и размеру соответствует форме и размеру доильного стакана 7. На раструбе 17 доильного стакана 7 (фиг. 5) расположен датчик положения соска 18, связанный с системой управления процессом доения 8. Доильный стакан 7 соединен с трубопроводом отсоса молока 20 и пневмопроводом 21. Манипулятор 4 имеет дополнительный держатель 22, в который помещается датчик положения вымени 13 в его нерабочем состоянии. В каждом доильном станке 3 конвейерной доильной установки смонтирована кормушка 23, в которую подается корм для животных из трубопровода 24, а к кормушке прикреплен датчик наличия животного 25, связанный с системой управления механизма перемещения 12 и системой управления процессом доения 8. В каждом станке имеются также подвижные перегородки 26 и 27, с обеих сторон закрывающие станок. В зоне механизма перемещения установлены оптический измеритель 28 и фотодатчик 29, связанный с системой управления механизмом перемещения 12 (фиг, 6), и предназначены для регистрации появления доильного станка 3 в зоне действия механизма перемещения 10. Подвижная платформа имеет привод.
Предлагаемое устройство работает следующим образом.
Платформа со станками 3 (фиг. 1) при помощи привода приводится в движение, 5 После мойки животного в подготовительном бункере 9 открывается перегородка 25 и животное входит в станок 3 для доения, где оно подходит к кормушке 23 и касается датчика
26,который подает команду на систему уп- 0 равления механизмом перемещения 12 и на
систему управления процессом манипулятора 4, перенос доильных стаканов 7 к вымени животного и закрывание перегородки
27.После поворота манипулятора 4 и закры- 5 тия перегородки 27 под животное механизмом перемещения 10 из положения МР1 в положение МР2, а затем в положение МРЗ переносится датчик положения вымени 13, после чего осуществляется его вертикаль0 ный подъем (фиг. 2).
Соски вымени касаются сенсорных ячеек 15 датчика положения вымени 13 (фиг. 3), а так как каждая сенсорная ячейка 15 имеет свои заранее определенные координаты и
5 соединена с системой управления механизмом перемещения 12 посредством кабеля связи 14, то определяется конечное позиционирование механизма перемещения по но- меру сработавших ячеек. В случае
0 отсутствия всех четырех сосков в областм нахождения датчика положения вымени 13 с помощью механизма перемещения 10 обеспечивается поиск сосков вымени в заранее заданной области. Информация о ка5 сании всех четырех сосков вымени животного фиксируется. После определения положения всех четырех сосков механизм перемещения устанавливает датчик положения вымени 13 в держатель 22 (МР4),
0 переходит в одно из положений МР5-МР8 и осуществляет перенос доильных стаканов в . предварительно определенное положение сосков. Система управления процессом доения 8 обеспечивает весь технологический
5 процесс доения. Как только один из сосков попадает в раструб 17 доильного стакана 7, и он под действием вакуума надевается на сосок. Система управления процессом доения 8 обеспечивает отвод манипулятора 4 в
0 исходное положение после завершения доения животного. При подходе в зону механизма перемещения следующего доильного станка 3 срабатывает оптический излучатель 28 и фотодатчик 29 (фиг, 6) и подается
5 команда механизму перемещения на подготовку к новому циклу работы и т.д.
В качестве примера конкретного выполнения была использована конвейерная доильная установка Карусель, где е качестве еханизма перемещения 10 применен сериино выпускаемый робот Пума - 250, в качестве системы управления роботом 12 - система Сфера-36, а в качестве датчика положения соска 18 - емкостной датчик.
Использование предлагаемого устройства позволяет обеспечить достижение следующих технико-экономических преимуществ: улучшение условий труда рабочих за счет уменьшения простоев в ожидании животного, уменьшение количества обслуживающего персонала за счет полной автоматизации процесса доения, повышение отдачи молока на 12-17% за счет того, что начало доения совпадает с желанием животного доиться. Формула изобретения Автоматизированная доильная установка, содержащая подвижную платформу
0
и размещенные на ней доильные станки с кормушками и манипуляторами доильных стаканов, соединенные с системой управления процессом доения датчик положения животного и измеритель координат положения сосков, отличающаяся тем, что, с целью повышения производительности доильной установки, доильные стаканы снабжены соединенными с системой управления процессом доения датчиками наличия сосков в них, а измеритель координат положения сосков - механизмом его перемещения с системой управления, связанной с системой управления процессом доения, при этом датчик положения животного установлен в кормушке, а измеритель выполнен в виде пластины с сенсорными ячейками.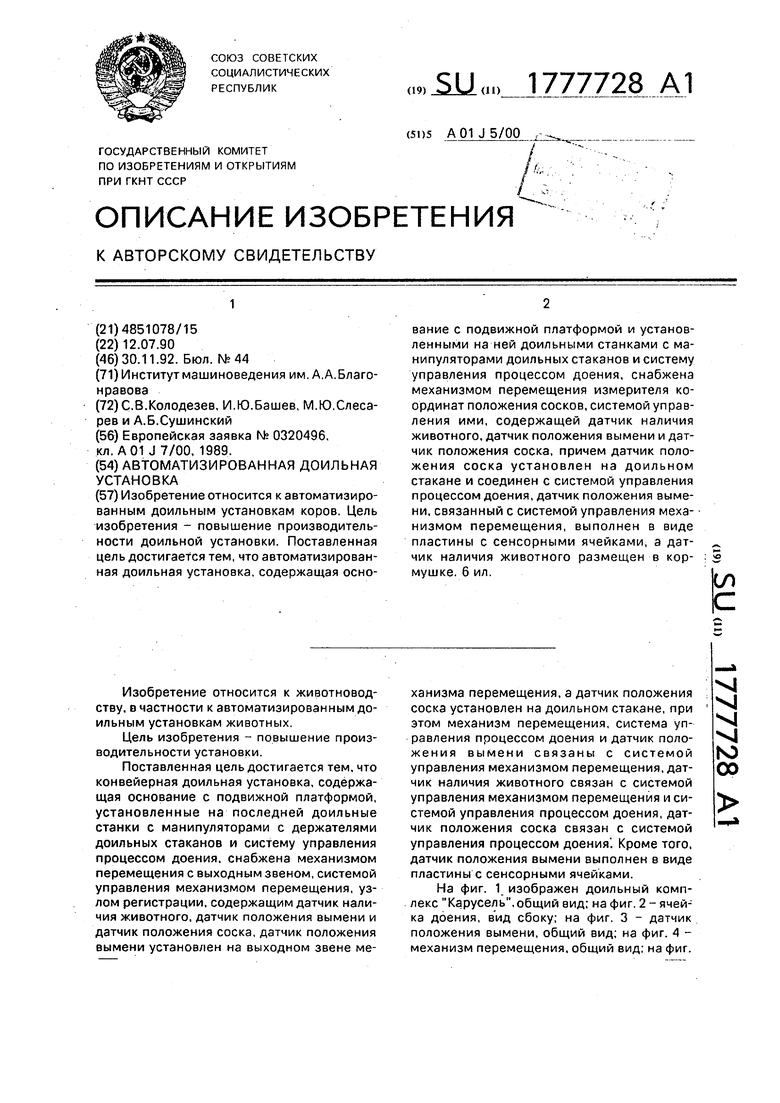
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ДОИЛЬНАЯ УСТАНОВКА | 2003 |
|
RU2244417C2 |
| Манипулятор доильной установки с управляемым режимом доения по четвертям вымени коровы | 2019 |
|
RU2715859C1 |
| ДОИЛЬНАЯ УСТАНОВКА | 1994 |
|
RU2071247C1 |
| УСТАНОВКА ДОИЛЬНАЯ ВЫДВИЖНАЯ | 2002 |
|
RU2234835C1 |
| Способ детектирования доильного робота | 2022 |
|
RU2795709C1 |
| Способ и устройство для бесконтактного сканирования биологических объектов | 2021 |
|
RU2769671C1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 2000 |
|
RU2186486C2 |
| Манипулятор доильной установки | 1987 |
|
SU1440427A1 |
| ДОИЛЬНАЯ УСТАНОВКА С ВНУТРЕННИМ РОБОТИЗИРОВАННЫМ УСТРОЙСТВОМ | 2013 |
|
RU2578613C1 |
| Биотехническая система поиска сосков на вымени дойного животного для робота-дояра | 2017 |
|
RU2661386C1 |
Изобретение относится к автоматизированным доильным установкам коров. Цель изобретения - повышение производительности доильной установки. Поставленная цель достигается тем, что автоматизированная доильная установка, содержащая основание с подвижной платформой и установленными на ней доильными станками с манипуляторами доильных стаканов и систему управления процессом доения, снабжена механизмом перемещения измерителя координат положения сосков, системой управления ими, содержащей датчик наличия животного, датчик положения вымени и датчик положения соска, причем датчик положения соска установлен на доильном стакане и соединен с системой управления процессом доения, датчик положения вымени, связанный с системой управления механизмом перемещения, выполнен в виде пластины с сенсорными ячейками, а датчик наличия животного размещен в кормушке. 6 ил. со
л 2
n,s- .2
W
Плечо
двигатель 1-го сустава
Фиг.З
Верхняя часть рукн
Предплечье ($tx C jrtotbt}4(c
1 12
.Ь
Я
20
Фиг 6
| СПОСОБ ПОЛУЧЕНИЯ 3- | 0 |
|
SU320496A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
