Изобретение относится к области самонастраивающихся систем управления электроприводами и может применяться в составе электроприводов различного назначения в условиях труднодоступности для обслуживания или наличия агрессивных сред, где присутствие человека невозможно или опасно, а также для эксплуатации электроприводов при отсутствии квалифицированного персонала для наладки.
Известен самонастраивающийся электропривод (RU 2450300 C1, G05B 13/02), содержащий сумматоры, корректирующее устройство, усилитель, электродвигатель с редуктором, датчик положения, квадратор, блоки деления, источники постоянного сигнала, интегратор, синусный функциональный преобразователь, блоки умножения, задатчик амплитуды, блок извлечения квадратного корня. Самонастраивающийся электропривод работает следующим образом. Сигнал ошибки на выходе сумматора 1, первый отрицательный (со стороны датчика 6) и второй положительный входы которого имеют единичные коэффициенты усиления, после коррекции в блоке 2, усиливаясь, поступает на вход электродвигателя, приводя его вал во вращательное движение с направлением и скоростью, зависящими от поступающего сигнала на входе. Как известно, величина ошибки при установленном корректирующем устройстве 2 с постоянной структурой и постоянными параметрами будет увеличиваться при увеличении и амплитуды, и частоты входного сигнала и уменьшаться при уменьшении амплитуды и частоты. Таким образом, если амплитуда имеет такое значение, при котором ошибка становится меньше допустимой, то можно увеличивать частоту и, следовательно, скорость работы электропривода, не превышая заданную динамическую точность.
Недостатком данного способа является то, что решение имеет достаточно сложное математическое описание для реализации в микропроцессорной технике с ограниченными ресурсами.
Известен способ самонастройки системы управления объектом и устройство для его реализации (RU 2304298 C2, G05B 13/00), который содержит объект управления, регулятор, устройство сравнения задающего сигнала и сигнала обратной связи, блок вычисления оптимальных настроек, блок получения модели объекта управления, блок управления контуром самонастройки, сумматор, блок управления контуром самонастройки, блок получения численной характеристики входного сигнала объекта управления, блок получения численной характеристики выходного сигнала объекта управления, блок получения модели объекта управления, блок построения эталонной модели системы, источник задающего сигнала. Задача самонастройки решается тем, что подается управляющее воздействие на объект, определяются параметры модели объекта управления на основе его реакции на управляющее воздействие и вычисляются значения настраиваемых параметров системы управления, определяются численные характеристики входного и выходного сигналов объекта управления, по которым находят передаточную функцию модели объекта управления, формируют модель эталонной системы управления в виде передаточной функции на основе заданных показателей, а настраиваемые параметры системы управления определяют на основе передаточной функции модели объекта управления и передаточной функции модели эталонной системы управления итерационным путем в отношении структуры и параметров системы управления по показателям качества переходного процесса системы, при этом все преобразования осуществляются на основе вещественного интерполяционного метода.
Недостатком данного способа является то, что дополнительно необходимо построение эталонной модели для сравнения с моделью объекта управления при настройке параметров системы управления.
Известен способ адаптивной автоматической самонастройки многопараметрических систем автоматического управления на оптимальные условия (RU 2251134 C2, G05B 13/00), в котором в пространстве оптимизируемых параметров из исходного состояния делают шаг в случайном направлении в соответствии с нормальным законом распределения в нескольких независимых параллельных каналах, производят выбор наилучшего канала на основании значения функции качества. Если значение функции качества в новом состоянии больше или равно значению функции качества в исходной точке, то система возвращается в первоначальное состояние, после чего снова формируют случайный шаг, отсчитанный из старого состояния, в каждом параллельном канале. Если значение функции качества в новом состоянии меньше значения функции качества в исходной точке, то за исходное состояние берут новое, после чего снова формируют случайный шаг, отсчитанный из нового исходного состояния, в каждом параллельном канале.
Недостатком данного способа является то, что поиск оптимального решения осуществляется формированием случайных шагов при отсчете их из старого состояния системы, при этом возможно попадание в локальный минимум на поверхности поиска, в этом случае этом настройка остановится до достижения оптимального результата, если не принять мер по выходу из локальных ловушек. Данный способ взят за прототип как наиболее близкий к предлагаемому способу самонастройки системы управления.
Технической задачей данного изобретения является создание более эффективного способа самонастройки и подстройки в процессе работы системы управления электроприводом, который позволяет производить настройку коэффициентов ПИ-регуляторов на заданный критерий оптимальности без участия человека и может применяться там, где непосредственное присутствие человека невозможно или опасно, либо там, где отсутствует необходимая квалификация персонала для наладки электроприводной техники.
Технический результат изобретения состоит в повышении точности самонастройки системы управления электроприводом без необходимости последующей точной подстройки специалистом за счет применения методов искусственного интеллекта.
Технический результат достигается тем, что непосредственно на электроприводе или его модели происходит настройка коэффициентов ПИ-регуляторов тока и скорости в двухконтурной системе стабилизации скорости или ПИ-регуляторов тока, скорости и положения в трехконтурной системе позиционирования при помощи модифицированного под эту задачу генетического алгоритма, осуществляющего поиск оптимального решения в пространстве поиска согласно заданным критериям оптимизации.
Сущность изобретения заключается в том, что в течение определенного интервала времени при подаче случайно сгенерированного управляющего задания на вход электропривода или предварительно построенной его модели производится замер тока, напряжения якоря, скорости и передается в персональный компьютер либо иное вычислительное устройство для обработки (Фиг. 1). В вычислительном устройстве программно реализован модернизированный генетический алгоритм, адаптированный к задаче оптимизации коэффициентов ПИ-регуляторов в системе управления.
Качество системы управления электроприводом можно оценивать по следующим параметрам:
- время переходного процесса для заданного параметра tпп;
- жесткость механической характеристики  ;
;
- перерегулирование  ;
;
- точность регулирования заданного параметра Δx=хзад-хуст.
- отсутствие колебательного характера переходных процессов.
Согласно этим параметрам формируется необходимое движение рабочего органа исполнительного механизма с точки зрения технологических и технико-экономических требований. Далее рассмотрена работа алгоритма для стабилизации скорости ω на валу электродвигателя.
Показатели качества системы управления с ПИ-регуляторами достигаются оптимизацией коэффициентов звеньев регулятора kp, ki.
Коэффициенты ПИ-регулятора можно представить в рамках генетических алгоритмов генами, обеспечивающими требуемое поведение объекта, которые образуют массив - хромосому. Для двухконтурной системы стабилизации скорости хромосома имеет следующий вид:
где  - ген, кодирующий пропорциональный коэффициент регулятора тока;
- ген, кодирующий пропорциональный коэффициент регулятора тока;
 - ген, кодирующий интегральный коэффициент регулятора тока;
- ген, кодирующий интегральный коэффициент регулятора тока;  - ген, кодирующий пропорциональный коэффициент регулятора скорости;
- ген, кодирующий пропорциональный коэффициент регулятора скорости;  - ген, кодирующий интегральный коэффициент регулятора скорости.
- ген, кодирующий интегральный коэффициент регулятора скорости.
Способ легко может быть расширен для задачи самонастройки системы управления электроприводом при задаче позиционировании с добавлением коэффициентов kp, ki регулятора положения в состав хромосомы, при этом алгоритм самонастройки остается тот же.
Согласно терминологии теории генетических алгоритмов получившийся массив A коэффициентов именуется как особь. Генетический алгоритм осуществляет поиск наилучших решений согласно критерию оптимизации среди имеющихся особей, образующих популяцию. Популяция особей имеет следующий вид
где A1, A2, …, AM - особи популяции, M - количество особей популяции.
Перед применением генетического алгоритма начальная популяция инициализируется случайными значениями из допустимого диапазона.
Для обучения генерируется случайное управляющее задание Uз, и после подачи его на управляющий вход снимаются параметры электропривода и вычисляется приспособленность особей в процессе оптимизации.
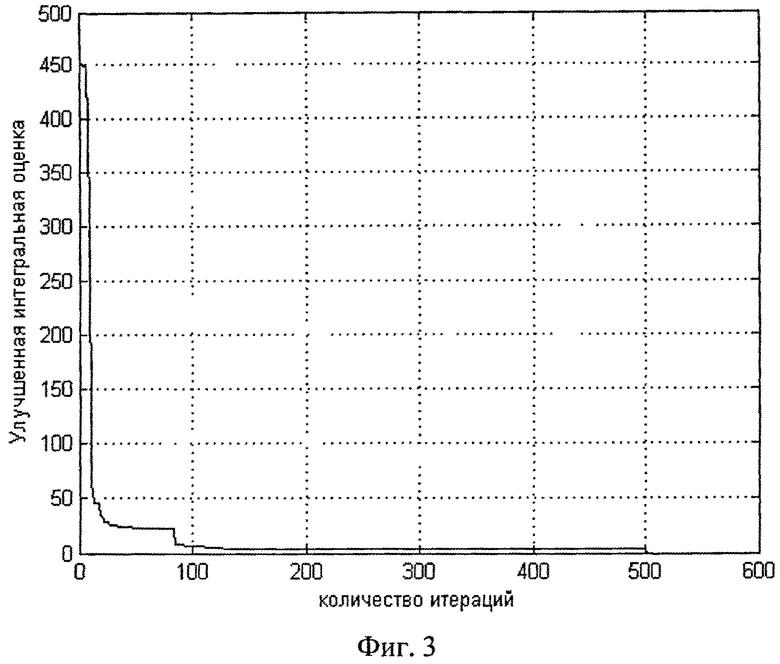
Под приспособленностью конкретных особей понимается степень соответствия выходной скорости ω модели и управляющего задания Uз при подстановке в регуляторы коэффициентов, соответствующих закодированным в особи значениям, согласно критериев оптимальности для данной системы. В качестве критерия оптимизации применяется улучшенная интегральная оценка, которая имеет следующее математическое описание

где e(t)=Uз-ω ошибка регулирования;  - скорость нарастания ошибки регулирования; α - коэффициент, отражающий постоянную времени; K - время интегрирования.
- скорость нарастания ошибки регулирования; α - коэффициент, отражающий постоянную времени; K - время интегрирования.
Улучшенная интегральная оценка кроме площади ошибки учитывает скорость нарастания ошибки. Это позволяет алгоритму посредством задания величины параметра α настраивать коэффициенты регулятора исходя из требований к переходным процессам.
После вычисления оценки приспособленности для каждой особи, результаты сводятся в массив для последующего анализа.
Отбираются особи с наименьшими показателями интеграла оценки для последующего их скрещивания, которое заключается в обмене генами в случайной выбранной паре особей. В терминологии генетических алгоритмов отобранные особи образуют родительский пул. Применяется метод рулетки, при этом вероятность выбора особи для скрещивания зависит от ее оценки приспособленности и чем выше приспособленность, тем больший сектор V(Ai), выраженный в относительных единицах, на воображаемой рулетке особь занимает. Вероятность селекции хромосомы Ai выражается следующим образом
 ,
,
где F(Ai) - значение функции приспособленности.
Вычисляется занимаемый сектор на рулетке по формуле

Вычисляется количество копий особей в отобранных для скрещивания родительских парах по следующей формуле

Чтобы избежать преждевременной сходимости алгоритма производится периодическая замена одной из особей родительского пула на случайную новую особь.
После того как сформирован родительский пул, применяются генетические операторы скрещивания и мутации над парами особей, выбираемыми в порядке их вероятности селекции Ps(Ai).
Для скрещивания используется алгоритм с вещественным кодированием, при котором коэффициенты регулятора не переводятся в бинарный вид для операций. В качестве оператора скрещивания используется арифметический кроссовер. При этом возникают два «потомка»  и
и  , которые рассчитываются по следующим формулам
, которые рассчитываются по следующим формулам


где  и
и  - скрещивающиеся родительские особи, m - константа из интервала [0;1].
- скрещивающиеся родительские особи, m - константа из интервала [0;1].
Далее применяется случайная мутация, роль которой второстепенна и возрастает когда происходит вырождение популяции.
Процесс оптимизации носит итерационный характер с отбором лучших особей на каждой итерации и уничтожением остальных. Таким образом, процесс повторяется, пока на какой-то итерации не будет достигнута заданная оценка приспособленности. Тогда алгоритм завершает свою работу и производится тестирование на новом задании при разных условиях. После подбора коэффициентов и завершения тестирования при разных входных заданиях с соблюдением условия оптимальности (коэффициент α формулы 1) систему управления можно считать настроенной.
Результаты экспериментирования.
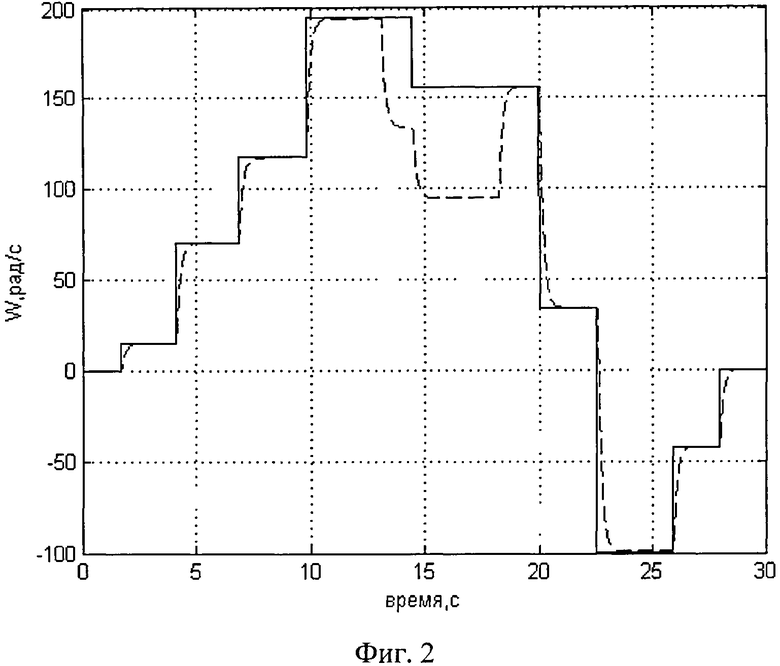
Итерационным способом при помощи модернизированного генетического алгоритма произведена настройка коэффициентов системы управления. Предварительно на вход модели подается случайное управляющее задание в течение 30 секунд из допустимого диапазона (Фиг. 2) и, для наглядности результата, момент нагрузки на интервале с 13 по 17 секунду. На графике видно, что достижение задания имеет инерционный характер, а при подаче момента сопротивления скорость модели нерегулируемого электропривода не достигает заданной управляющим заданием.
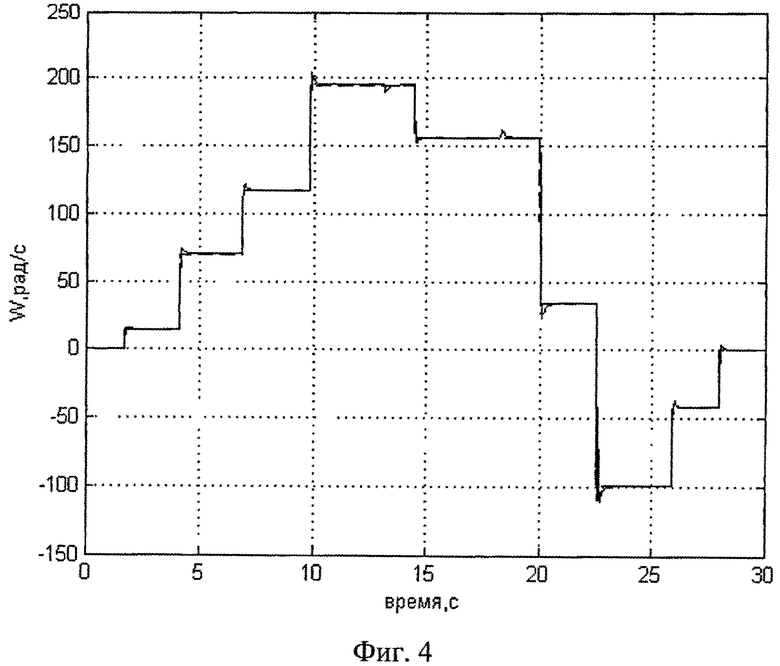
Подобное поведение соответствует модели электродвигателя постоянного тока, с которого построена модель. Настройка коэффициентов регуляторов при помощи модернизированного генетического алгоритма производится на данном обучающем множестве. Итерации повторяются до достижения минимальной улучшенной интегральной погрешности. Процесс оптимизации экспоненциально уменьшается по мере приближения интеграла оценки к нулю на интервале 500-5000 итераций (Фиг. 3). В результате коэффициенты регулятора, заданные в финальной лучшей особи, демонстрируют при подстановке в систему управления (Фиг. 1) достаточно точные результаты (Фиг. 4). Многократные повторения эксперимента дают положительный результат, и каждый раз алгоритм находит наилучшее решение согласно заданным критериям.
Предложенный способ самонастройки управления электроприводом может быть реализован как в виде программного обеспечения на персональном компьютере, так и на любой ЭВМ, в том числе в микропроцессорном устройстве систем управления существующих электроприводов, при этом время поиска оптимальной настройки сопоставимо со временем, затрачиваемым на эту же работу специалистом в области наладки электроприводов.
Изобретение относится к области самонастраивающихся систем управления электроприводами. Способ самонастройки заключается в том, что в течение определенного интервала времени подают случайно сгенерированное управляющее задание на вход электропривода или предварительно построенной его модели. Производится замер тока, напряжения якоря, скорости на валу двигателя и запись данных параметров в персональный компьютер, или ЭВМ, или микропроцессорное устройство. Оптимизируют при помощи программно реализованного модифицированного генетического алгоритма коэффициенты ПИ-регуляторов контуров регулирования системы управления электроприводом. Модифицированный генетический алгоритм осуществляет поиск оптимума в пространстве поиска коэффициентов ПИ-регуляторов для достижения требуемых переходных процессов согласно критериям качества для электропривода, заданных в технологическом процессе. При этом полученные коэффициенты ПИ-регуляторов подставляют в систему управления электроприводом. Технический результат изобретения состоит в повышении точности самонастройки системы управления электроприводом. 4 ил.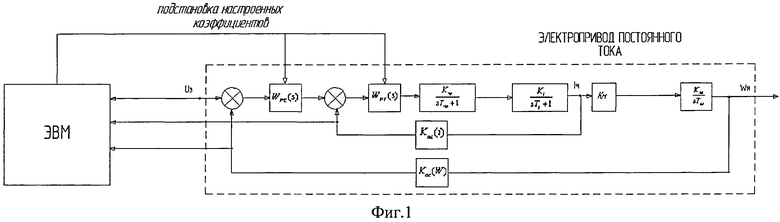
Способ самонастройки системы управления электроприводами, включающий подачу на вход электропривода или его модели в течение определенного интервала времени случайно сгенерированного управляющего задания, замер и запись в персональный компьютер, или ЭВМ, или микропроцессорное устройство параметров тока якоря, напряжения якоря и скорости на валу двигателя и оптимизацию при помощи программно реализованного модифицированного генетического алгоритма коэффициентов ПИ-регуляторов контуров регулирования системы управления электроприводом в соответствии с заданными критериями качества, отличающийся тем, что для реализации функции самонастройки системы управления используется модифицированный генетический алгоритм, осуществляющий поиск оптимума в пространстве поиска коэффициентов ПИ-регуляторов контуров регулирования для достижения требуемых переходных процессов согласно критериям качества для электропривода, заданных в технологическом процессе, при этом полученные коэффициенты ПИ-регуляторов подставляют в систему управления электроприводами.
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2450300C1 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
| СПОСОБ АДАПТИВНОЙ АВТОМАТИЧЕСКОЙ САМОНАСТРОЙКИ МНОГОПАРАМЕТРИЧЕСКИХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОПТИМАЛЬНЫЕ УСЛОВИЯ | 2003 |
|
RU2251134C2 |
| US 6832127 B1, 14.12.2004. | |||

