Изобретения относятся к области автоматического управления и регулирования различными объектами, в частности к области адаптивных систем и методов автоматического управления с пробным непериодическим сигналом.
Изобретения могут быть использованы в системах регулирования технологических параметров в металлургической, химической, энергетической, нефте- и газоперерабатывающей, пищевой и других отраслях промышленности.
Известен способ самонастройки систем автоматического управления, базирующийся на получении и использовании реакции объекта управления в целом на пробные воздействия [1]. Указанный способ самонастройки состоит из двух этапов. На первом этапе осуществляют предварительную идентификацию динамических свойств объекта управления, определяя приближенные значения настраиваемых коэффициентов регулятора путем формирования пробного гармонического сигнала. На втором этапе идентифицируют динамические свойства объекта управления, осуществляя подачу пробного ступенчатого сигнала на объект управления и уточняя значения коэффициентов регулятора.
Способ имеет известные ограничения и недостатки, в частности следующие. Во-первых, в нем необходимо выполнение длительной двухэтапной процедуры самонастройки. Во-вторых, настройка системы осуществляется в отношении косвенного показателя качества системы - степени устойчивости, который недостаточно характеризует как переходный процесс, возникающий в системе, так и саму систему управления. В-третьих, в нем используется приближенная настройка регулятора в силу принятия ряда допущений при получении расчетных соотношений. В-четвертых, возможности способа ограничены вычислением не более трех коэффициентов регулятора, тогда как на практике возникает необходимость в использовании более сложных законов управления, чем пропорционально-интегро-дифференциальный (ПИД).
Данные ограничения и недостатки способа снижают точность настройки системы и ее быстродействие.
Известен способ настройки регулятора действующих автоматических систем [2], в котором идентификацию объекта регулирования проводят по переходной характеристике замкнутой системы, полученной при подаче пробного ступенчатого сигнала на объект управления. В данном способе настройки регулятора в качестве основного параметра используется такой косвенный параметр качества системы, как показатель колебательности, однако в целом способ не позволяет добиться высокой точности настройки.
Известен способ, предложенный в [3], основанный на подаче на вход объекта управления ступенчатого воздействия, формировании реакции объекта на ступенчатое воздействие и производной этой реакции. С помощью этих функций определяют параметры модели объекта управления, которые пересчитываются в оптимальные настройки ПИД регулятора. В данном способе отсутствует длительная двухэтапная процедура. В этом смысле он более совершенен по сравнению с предыдущими аналогами, но ему также присущи их основные недостатки, которые не позволяют повысить точность и быстродействие автоматической настройки системы.
Наиболее близким по технической сущности и достигаемому результату к заявляемому способу самонастройки системы управления объектом является «Способ оптимальной автоматической настройки системы управлениям [4].
Данный способ оптимальной автоматической настройки системы управления заключается в переводе замкнутой системы управления в разомкнутый режим, подаче пробного сигнала на вход объекта, измерении параметров переходного процесса, определении по ним параметров принятой модели объекта управления, определении по параметрам модели оптимальных параметров настройки регулятора и переводе системы с оптимальными параметрами настройки в рабочий режим. В качестве пробного сигнала используется ступенчатый сигнал с настраиваемой амплитудой и полярностью. В качестве измеряемых параметров переходного процесса, вызванного пробным сигналом, используются максимальное значение производной выхода объекта и момент времени его достижения, момент времени достижения производной определенной доли от максимального значения производной, а также момент времени, в который значение производной выхода объекта уменьшается до определенной доли от максимального значения производной.
Указанный способ повышает качество самонастройки и регулирования. Но использованные в нем базовые аналитические соотношения, связывающие корневые частотные и временные параметры системы, являются весьма приближенными, и поэтому настройка системы в отношении наиболее важных параметров - перерегулирования и времени регулирования, является также весьма приближенной, что снижает точность способа.
Известен оптимальный автоматически настраивающийся общепромышленный регулятор (регулятор ОАОР) [1], включающий объект управления, блок управления режимами, блок предварительной идентификации, блок оценки параметров, блок вычисления настроек. Каждый из трех возможных режимов работы регулятора ОАОР задается положением бегунка коммутатора.
Недостатком известного регулятора является выполнение длительной двухэтапной процедуры самонастройки. При этом настройка регулятора не обеспечивает достаточной точности, являясь достаточно приблизительной в силу принятия ряда допущений при получении расчетных соотношений.
Известен автоматически настраивающийся адаптивный промышленный регулятор (регулятор АНАП) [3], включающий объект управления, блок оценки производной, блок оценки параметров, блок вычисления настроек, блок управления режимами. АНАП регулятор может работать в одном из трех режимов: ручного управления; автоматической настройки параметров регулятора; автоматического регулирования.
В данном регуляторе отсутствует двухэтапная процедура настройки, однако ему присущи недостатки регулятора [1], которые не позволяют повысить точность и быстродействие автоматической настройки системы.
Наиболее близкой по технической сущности и достигаемому результату к заявляемой самонастраивающейся системе управления объектом является система управления, реализующая способ оптимальной автоматической настройки системы управления [4].
Известная самонастраивающаяся система управления объектом содержит последовательно соединенные устройство сравнения задающего сигнала и сигнала обратной связи, ключ, регулятор, сумматор и объект управления, выходом подключенный к устройству сравнения задающего сигнала и сигнала обратной связи, а также блок вычисления оптимальных настроек, выходом соединенный с регулятором, и блок формирования пробного сигнала и идентификации параметров, выход которого подключен к входу блока вычисления оптимальных настроек. Вход блока формирования пробного сигнала и идентификации параметров связан с выходом объекта управления и входом устройства сравнения задающего сигнала и сигнала обратной связи. Блок формирования пробного сигнала и идентификации параметров включает блок управления и блок получения параметров объекта управления.
Недостатком данной самонастраивающейся системы управления объектом является недостаточная точность и быстродействие самонастройки системы, связанные с тем, что его настройка системы в отношении наиболее важных параметров - перерегулирования и времени регулирования, является весьма приближенной, что снижает се точность.
Основная задача, решаемая заявляемой группой изобретений, состоит в создании способа самонастройки системы управления объектом и устройства для его реализации, позволяющих повысить точность самонастройки за счет использования непараметрической формы представления моделей сигналов, системы и ее элементов. При этом достигается также повышение быстродействия самонастройки системы управления объектом за счет уменьшения объема вычислений.
Поставленная задача решается тем, что в способе самонастройки системы управления объектом, основанном на подаче управляющего воздействия на объект, определении параметров модели объекта управления на основе его реакции на управляющее воздействие и вычислении значений настраиваемых параметров системы управления, определяют численные характеристики входного и выходного сигналов объекта управления, по которым находят передаточную функцию модели объекта управления, формируют модель эталонной системы управления в виде передаточной функции на основе заданных показателей, а настраиваемые параметры системы управления определяют на основе передаточной функции модели объекта управления и передаточной функции модели эталонной системы управления итерационным путем в отношении структуры и параметров системы управления по показателям качества переходного процесса системы, при этом все преобразования осуществляются на основе вещественного интерполяционного метода (ВИМ).
Целесообразно формирование эталонной модели системы управления осуществлять на основе предварительно задаваемых оператором показателей качества системы. Оптимальна подача управляющего - воздействие на объект в виде пробного непериодического сигнала.
Пробный непериодический сигнал при этом может быть ступенчатым или линейно-нарастающим.
Настраиваемые параметры системы управления целесообразно определять на основе передаточных функций моделей объекта управления и эталонной модели системы управления, представленных в непараметрической форме.
Настраиваемые параметры системы управления при этом определяются на основе передаточных функций моделей объекта управления и эталонной модели системы управления итерационным путем в отношении структуры и параметров настраиваемой системы управления до достижения заданного совпадения эталонной и настраиваемой систем управления.
Достижение заданного совпадения эталонной и настраиваемой систем оптимально фиксировать по критерию перерегулирования при минимальной сложности системы управления.
Поставленная задача решается также тем, что устройство для реализации способа самонастройки системы управления объектом содержит объект управления, регулятор, устройство сравнения задающего сигнала и сигнала обратной связи, один из входов которого подключен к выходу объекта управления, блок вычисления оптимальных настроек, первым выходом подключенный к первому входу регулятора, блок получения модели объекта управления, выходом соединенный с первым входом блока вычисления оптимальных настроек, блок управления контуром самонастройки и сумматор, входами соединенный с выходом регулятора и первым выходом блока управления контуром самонастройки, а выходом связанный с объектом управления.
Новым является то, что в устройство для реализации способа введены блок получения численной характеристики входного сигнала объекта управления, блок получения численной характеристики выходного сигнала объекта управления и блок построения эталонной модели системы, одним из входов подключенный к выходу блока управления контуром самонастройки, вход которого подсоединен к второму выходу блока вычисления оптимальных настроек, а выход блока построения эталонной модели системы соединен с вторым входом блока вычисления оптимальных настроек, вход и выход объекта управления соединены с блоком получения модели объекта управления соответственно через блок получения численной характеристики входного сигнала объекта управления и блок получения численной характеристики выходного сигнала объекта управления, а регулятор вторым входом соединен с выходом устройства сравнения задающего сигнала и сигнала обратной связи, при этом второй и третий входы блока построения эталонной модели системы предназначены для подключения к источникам задания показателей качества системы и задания типа регулятора, а второй вход устройства сравнения задающего сигнала и сигнала обратной связи предназначен для подключения к источнику задающего сигнала.
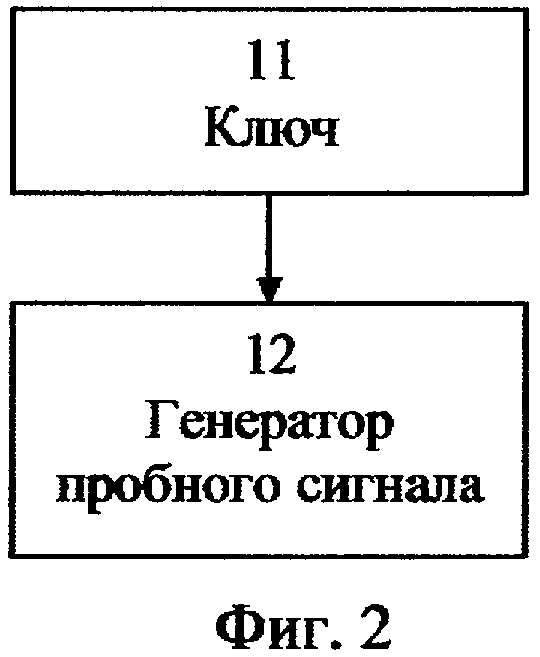
Предпочтительно блок управления контуром самонастройки выполнить в виде последовательно соединенных ключа и генератора пробного сигнала, при этом выход генератора пробного сигнала является первым выходом блока управления контуром самонастройки, вход ключа является входом блока управления контуром самонастройки, а выход ключа является вторым выходом блока управления контуром самонастройки.
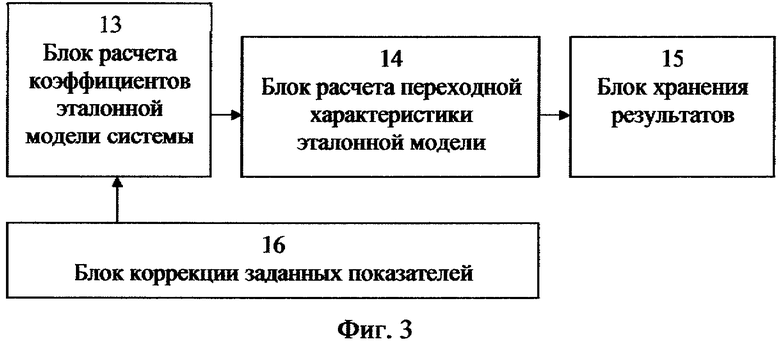
Оптимальным является выполнение блока построения эталонной модели системы в виде последовательно соединенных блока расчета коэффициентов эталонной модели, блока расчета переходной характеристики эталонной модели системы и блока хранения результатов, выход которого является выходом блока построения эталонной модели системы, а также блока коррекции заданных показателей, вход которого является первым входом блока построения эталонной модели системы, а выход подключен к входу блока расчета коэффициентов эталонной модели, при этом входы блока расчета коэффициентов эталонной модели являются вторым и третьим входами блока построения эталонной модели системы.
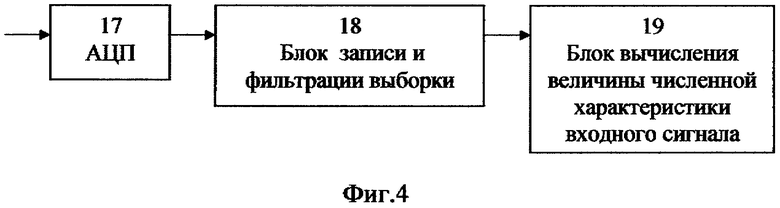
Блок получения численной характеристики входного сигнала объекта управления целесообразно выполнить содержащим последовательно соединенные аналогово-цифровой преобразователь, блок записи и фильтрации выборки и блок вычисления величины численной характеристики входного сигнала, при этом вход аналогово-цифрового преобразователя является входом блока получения численной характеристики входного сигнала объекта управления, а выход блока вычисления величины численной характеристики входного сигнала является выходом блока получения численной характеристики входного сигнала объекта управления.
Блок получения численной характеристики выходного сигнала объекта управления предпочтительно выполнить содержащим последовательно соединенные аналогово-цифровой преобразователь, блок записи, фильтрации и хранения выборки и блок вычисления величины численной характеристики выходного сигнала, при этом вход аналогово-цифрового преобразователя является входом блока получения численной характеристики выходного сигнала объекта управления, а выход блока вычисления величины численной характеристики выходного сигнала является выходом блока получения численной характеристики выходного сигнала объекта управления.
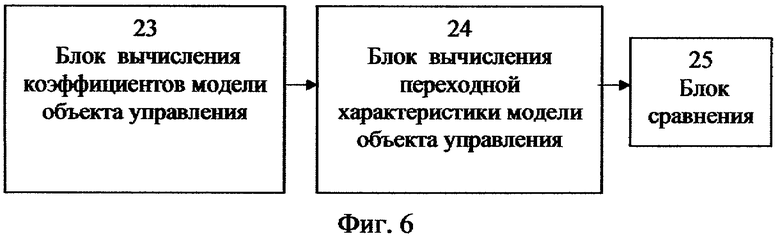
Блок получения модели объекта управления целесообразно выполнить в виде последовательно соединенных блока вычисления коэффициентов передаточной функции модели объекта управления, блока вычисления переходной характеристики модели объекта управления и блока сравнения, при этом входы блока вычисления коэффициентов передаточной функции модели объекта управления являются входами блока получения модели объекта управления, а выход блока сравнения является выходом блока получения модели объекта управления.
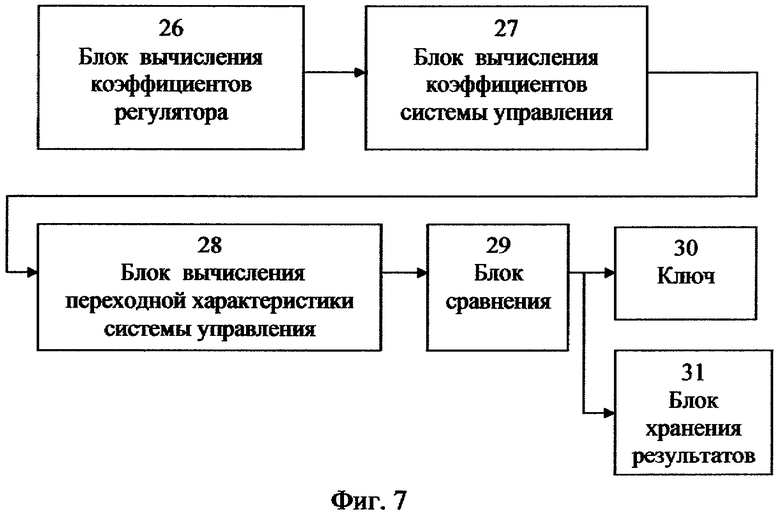
Блок вычисления оптимальных настроек оптимально выполнить содержащим последовательно соединенные блок вычисления коэффициентов регулятора, блок вычисления коэффициентов системы управления, блок вычисления переходной характеристики системы управления, блок сравнения и ключ, выход которого является вторым выходом блока вычисления оптимальных настроек, а также блок хранения результатов, выход которого является первым выходом блока вычисления оптимальных настроек, а вход подключен к выходу блока сравнения и к входу ключа, при этом входы блока вычисления коэффициентов регулятора являются первым и вторым входами блока вычисления оптимальных настроек.
Заявленные способ самонастройки системы управления объектом и самонастраивающаяся система управления объектом для его реализации имеют отличия от наиболее близких аналогов, следовательно, заявленные решения удовлетворяют условию патентоспособности изобретения «новизна».
Анализ уровня техники на соответствие заявленных решений условию патентоспособности изобретения «изобретательский уровень» показал следующее.
В представленном способе самонастройки и системе, работающей на его основе, в отличие от известных используется непараметрическая форма представления моделей сигналов, системы и ее элементов, что позволяет уменьшить объем вычислений, создать и реализовать алгоритм настройки системы на прямые показатели качества. При этом может быть использован не только ступенчатый пробный сигнал, традиционно используемый в аналогах, но и линейный, квадратично нарастающий, импульсный и т.д.
Кроме того, заявляемые изобретения позволяют осуществить не только параметрическую, но и структурную самонастройку регулятора.
При этом заданные параметры системы могут использоваться в максимально понятных оператору показателях качества системы - перерегулирования, времени установления переходного процесса (времени регулирования), максимальной скорости нарастания и других.
Заявленные изобретения взаимосвязаны настолько, что образуют единый изобретательский замысел, следовательно, данная группа изобретений удовлетворяет требованию единства изобретения.
Изобретение поясняется чертежами, где на фиг.1 представлена функциональная схема самонастраивающейся системы управления объектом по предлагаемому способу, на фиг.2 - блок управления контуром самонастройки, на фиг.3 - блок построения эталонной модели системы, на фиг.4 - блок получения численной характеристики входного сигнала, на фиг.5 - блок получения численной характеристики выходного сигнала, на фиг.6 - блок получения модели объекта управления, на фиг.7 - блок вычисления оптимальных настроек, на фиг.8 - график переходных процессов объекта управления и модели объекта управления, на фиг.9 - график переходного процесса модели эталонной системы, на фиг.10 - графики переходных характеристик модели эталонной системы и вычисленных переходных характеристик модели системы управления, на фиг.11 - графики переходных характеристик эталонной модели системы и настроенной модели системы управления.
Самонастраивающаяся система управления объектом (фиг.1), реализующая предложенный способ самонастройки системы управления объектом, содержит объект 1 управления, регулятор 2, устройство 3 сравнения задающего сигнала и сигнала обратной связи, один из выходов которого подключен к выходу объекта 1 управления, блок 4 вычисления оптимальных настроек, первым выходом подключенный к первому входу регулятора 2, блок 5 получения модели объекта управления, выходом соединенный с первым входом блока 4 вычисления оптимальных настроек, блок 6 управления контуром самонастройки и сумматор 7. Сумматор 7 входами соединен с выходом регулятора 2 и первым выходом блока 6 управления контуром самонастройки, а выходом связан с объектом 1 управления. Самонастраивающаяся система управления объектом содержит также блок 8 получения численной характеристики входного сигнала объекта управления 1, блок 9 получения численной характеристики выходного сигнала объекта управления 1 и блок 10 построения эталонной модели системы, один из входов которого подключен к выходу блока 6 управления контуром самонастройки. Вход блока 6 управления контуром самонастройки подсоединен к второму выходу блока 4 вычисления оптимальных настроек. Выход блока 10 построения эталонной модели системы соединен с вторым входом блока 4 вычисления оптимальных настроек. Вход и выход объекта управления 1 соединены с блоком 5 получения модели объекта управления соответственно через блок 8 получения численной характеристики входного сигнала объекта управления и блок 9 получения численной характеристики выходного сигнала объекта управления, а регулятор 2 вторым входом соединен с выходом устройства 3 сравнения задающего сигнала и сигнала обратной связи. Второй и третий входы блока 10 построения эталонной модели системы предназначены для подключения к источникам задания показателей качества системы и задания типа регулятора, являющихся внешними устройствами. Второй вход устройства 3 сравнения задающего сигнала и сигнала обратной связи предназначен для подключения к источнику задающего сигнала, являющемуся внешним устройством.
Блок 6 управления контуром самонастройки (фиг.2) содержит последовательно соединенные ключ 11 и генератор 12 пробного сигнала. Выход генератора 12 пробного сигнала является первым выходом блока 6 управления контуром самонастройки, вход ключа 11 является входом блока 6 управления контуром самонастройки, а выход ключа 11 является вторым выходом блока 6 управления контуром самонастройки.
Блок 10 построения эталонной модели системы (фиг.3) содержит последовательно соединенные блок 13 расчета коэффициентов эталонной модели системы, блок 14 расчета переходной характеристики эталонной модели и блок 15 хранения результатов, выход которого является выходом блока 10 построения эталонной модели системы, блок 16 коррекции заданных показателей, вход которого является первым входом блока 10 построения эталонной модели системы. Выход блока 16 коррекции заданных показателей подключен к входу блока 13 расчета коэффициентов эталонной модели системы, входы блока 13 расчета коэффициентов эталонной модели системы являются вторым и третьим входами блока 10 построения эталонной модели системы.
Блок 8 получения численной характеристики входного сигнала объекта управления (фиг.4) содержит последовательно соединенные аналогово-цифровой преобразователь 17, блок 18 записи и фильтрации выборки и блок 19 вычисления величины численной характеристики входного сигнала. Вход аналогово-цифрового преобразователя 17 является входом блока 8 получения численной характеристики входного сигнала объекта управления, а выход блока 19 вычисления величины численной характеристики входного сигнала является выходом блока 8 получения численной характеристики входного сигнала объекта управления.
Блок 9 получения численной характеристики выходного сигнала объекта управления (фиг.5) содержит последовательно соединенные аналогово-цифровой преобразователь 20, блок 21 записи, фильтрации и хранения выборки и блок 22 вычисления величины численной характеристики выходного сигнала. Вход аналогово-цифрового преобразователя 20 является входом блока 9 получения численной характеристики выходного сигнала объекта управления, а выход блока 22 вычисления величины численной характеристики выходного сигнала является выходом блока 9 получения численной характеристики выходного сигнала объекта управления.
Блок 5 получения модели объекта управления (фиг.6) содержит последовательно соединенные блок 23 вычисления коэффициентов модели объекта управления, блок 24 вычисления переходной характеристики модели объекта управления и блок 25 сравнения. Входы блока 23 вычисления коэффициентов модели объекта управления являются входами блока 5 получения модели объекта управления, а выход блока 25 сравнения является выходом блока 5 получения модели объекта управления.
Блок 4 вычисления оптимальных настроек (фиг.7) содержит последовательно соединенные блок 26 вычисления коэффициентов регулятора, блок 27 вычисления коэффициентов системы управления, блок 28 вычисления переходной характеристики системы управления, блок 29 сравнения и ключ 30, выход которого является вторым выходом блока 4 вычисления оптимальных настроек. Блок 4 вычисления оптимальных настроек также содержит блок 31 хранения результатов, выход которого является первым выходом блока 4 вычисления оптимальных настроек, а вход подключен к выходу блока 29 сравнения и к входу ключа 30. Входы блока 26 вычисления коэффициентов регулятора являются первым и вторым входами блока 4 вычисления оптимальных настроек.
Способ самонастройки системы управления объектом реализуется с помощью заявляемой самонастраивающейся системы следующим образом.
На первом этапе, именуемом идентификацией объекта управления, пользователь задает требование адекватности в виде численного значения критерия адекватности переходной характеристики модели объекта управления его экспериментальной характеристике. Это значение вводится в блок 25 сравнения блока 5 получения модели объекта управления и используется в дальнейшем для оценки полученного в идентификации результата.
Система управления переводится в разомкнутое состояние, для чего выключается устройство 3 сравнения и регулятор 2 переводится в режим трансляции на свой выход входного сигнала u(t), значение которого в этом режиме должно быть равно нулю.
На вход объекта управления 1 через устройство 7 сравнения с выхода генератора 12 пробного сигнала, переключаемого ключом 11 блока 6 управления контуром самонастройки, подается пробный непериодический сигнал Uпр. Он может быть ступенчатым, линейно нарастающим или иным по форме. Полярность сигнала зависит от текущего состояния объекта управления и, как и его амплитуда, должна укладываться в рамки допустимых норм технологического процесса, протекающего в объекте управления. Амплитуда сигнала может быть равной номинальной величине входного сигнала объекта или составлять от нее какую-то долю, например, 5-10%. На выходе объекта управления 1 появляется выходной сигнал, характеризующий переходный процесс у(t). Сигналы входа и выхода объекта управления 1 Uпр и у(t) подаются на блок 8 получения численной характеристики входного сигнала объекта управления и блока 9 получения численной характеристики выходного сигнала объекта управления, где обрабатываются блоками АЦП 17 и 20 соответственно, входной сигнал записывается и фильтруется в блоке 18, выходной сигнал записывается, фильтруется и хранится в блоке 21. После окончания переходного процесса сигнала у(t) подача пробного сигнала Uпр прекращается, и он не оказывает на объект управления никакого влияния. Далее для получения математических моделей сигналов в специальной машинно-ориентированной форме - в форме численных характеристик - результат поступает соответственно на блок 19 вычисления величины численной характеристики входного сигнала и блок 22 вычисления величины численной характеристики выходного сигнала, являющихся элементами соответствующих блоков 8 и 9 получения численных характеристик входного и выходного сигналов.
Выходные сигналы блоков 8 и 9 поступают на входы блока 23 вычисления коэффициентов модели объекта управления, входящего в блок 5 получения модели объекта управления, в виде передаточной функции шаблоном заданного порядка. В блоке 23 происходит вычисление коэффициентов передаточной функции, которые далее поступают на блок 24 для вычисления переходной характеристики модели объекта управления. В блоке 25 происходит проверка полученной характеристики на ее адекватность экспериментальной, хранимой в блоке 21 блока 9 получения численной характеристики выходного сигнала. Если модель не удовлетворяет требованию адекватности, то процесс моделирования повторяется в блоке 23 вычисления коэффициентов модели объекта управления при увеличенном порядке шаблона передаточной функции модели. Далее вновь происходит расчет переходной характеристики в блоке 24 вычисления переходной характеристики модели объекта управления и проверка ее на адекватность экспериментальной характеристике в блоке сравнения 25. Если результат окажется неудовлетворительным, то процедура моделирования повторяется при менее строгом критерии адекватности, начиная с простого шаблона передаточной функции в блоке 23. Если результат и в этом случае неудовлетворителен, то процедура идентификации повторяется с этапа подачи на вход объекта пробного непериодического сигнала Uпр и далее по приведенному порядку. При положительном результате коэффициенты передаточной функции модели объекта управления поступают на блок вычисления оптимальных настроек 4.
Следующий этап начинается с ввода в блок 10 желаемых показателей качества, предъявляемых к системе, - перерегулирования и времени регулирования, на основе которых в блоке 13 расчета коэффициентов эталонной модели системы происходит расчет коэффициентов передаточной функции эталонной модели системы и получение эталонной передаточной функции системы. Значения коэффициентов этой функции поступают в блок 14 расчета переходной характеристики эталонной модели блока 10, в котором вычисляется переходная характеристика эталонной системы, поступающая в виде численной выборки в блок 15 хранения результатов блока 10 построения эталонной модели системы. В блок 10 также вводится информация о типе регулятора, с помощью которого будет осуществляться управление всей системой управления. Эта информация и значения требуемых показателей качества хранится в блоке 15 хранения результатов в виде числовых значений.
На следующем этапе определяется вид передаточной функции регулятора и значение его коэффициентов. В блок 26 вычисления коэффициентов модели управления, входящего в состав блока 4 вычисления оптимальных настроек, поступают вычисленные коэффициенты объекта управления с блока 5 и данные о желаемом типе регулятора с блока 10. Далее в блоке 26 вычисления коэффициентов регулятора на основе этих данных происходит вычисление настраиваемых коэффициентов регулятора, значения которых поступают на блок 27 вычисления коэффициентов системы управления, в котором на основе данных о значениях коэффициентов регулятора и передаточной функции объекта управления осуществляется синтез системы управления. Найденные коэффициенты передаточной функции системы управления поступают на блок 28 вычисления переходной характеристики системы управления, и далее результат сравнивается с эталоном, хранящимся в виде выборки в блоке 15 хранения результатов блока 10, и оценивается на соответствие показателям качества системы, хранящимся в виде числовых значений в блоке 15. В случае неудовлетворительного результата происходит новая итерация вычислений коэффициентов регулятора и коэффициентов системы управления, называемая параметрической настройкой системы. В случае, если параметрическая настройка не принесла желаемых результатов, в блоке 26 вычисления коэффициентов регулятора происходит увеличение порядка структуры регулятора. Данная процедура является структурной настройкой системы, после которой следует описанная выше настройка параметрическая. В случае неудовлетворительного результата срабатывает ключ 30, входящий в блок 4, сигнал с которого поступает на блок 6 управления контуром самонастройки, ключ 11 которого подает сигнал на блок 16 коррекции результатов заданных показателей блока 10, который увеличивает желаемое время переходного процесса и инициирует перерасчет новой модели эталонной системы. Далее процедура расчета коэффициентов регулятора повторяется до тех пор, пока не будет получен удовлетворительный результат с точки зрения перерегулирования и скорректированного блоком 16 времени регулирования. В этой части работы способа и устройства для его реализации имеются две особенности. Первая состоит в том, что способ позволяет настраивать системы с регуляторами произвольного порядка, включая регуляторы типа ПИД как частный случай. Вторая особенность состоит в реализации двух итерационных процедур. Первая обеспечивает параметрический поиск решения, вторая - структурный. Цель структурных итераций состоит в поиске максимально простого регулятора, при котором могут быть достигнуты заданные показатели качества. Такое техническое решение обеспечивает минимизацию вычислительных затрат и повышение за счет этого точности, быстродействия и надежности контура самонастройки и системы в целом. После этого коэффициенты регулятора, удовлетворяющие заданным и скорректированным показателям, записываются в блок 31 хранения результатов блока 4, откуда они поступают на регулятор 2 для его перенастройки. Устройство сравнения 3 начинает вычислять ошибку рассогласования между введенным значением входного сигнала u(t) и текущим сигналом выхода у(t) объекта управления, то есть система входит в регулируемый режим с новыми рассчитанными коэффициентами регулятора 2.
В заявляемом способе самонастройки системы управления объектом можно выделить три относительно самостоятельных процедуры и соответствующие им задачи:
1) идентификация объекта управления;
2) получение желаемой передаточной функции системы;
3) определение вида передаточной функции регулятора и значений его коэффициентов.
Для более подробного пояснения реализации способа самонастройки и работы системы рассмотрим последовательность преобразований сигналов с представлением базовых расчетных соотношений выделенных задач. Эти преобразования осуществляются на основе вещественного интерполяционного метода (ВИМ), основы которого изложены ниже.
При рассмотрении сигналов и систем, относящихся к классам непрерывных, и решении задач синтеза таких систем целесообразно использовать модели в области изображений, получаемые на основе каких-либо интегральных преобразований. Наиболее распространенными являются преобразования Лапласа и Фурье. Они позволяют решать все основные задачи расчета динамических систем в терминах функций-изображений, что оказывается значительно более просто по сравнению с решением тех же задач в области времени. Однако эти преобразования имеют недостатки, которые проявляются при аппаратно-программной реализации таких способов, - при численных операциях необходимо выполнять преобразования вещественной и мнимой частей рассматриваемых моделей, что влечет за собой большой объем вычислений. Этот недостаток устраняется при использовании вещественного интегрального преобразования

которое ставит в соответствие функции-оригиналу f(t) изображение F(δ). Отметим здесь главное: получаемая функция F(δ) относится к классу функций-изображений и, следовательно, обладает отмеченными преимуществами по сравнению с функциями времени; в то же время она свободна от трудностей численных действий над изображениями по Фурье F(jω) или Лапласу F(p), которые имеют аргумент соответственно мнимый jω или комплексный р=δ+jω.
Условия существования и единственности функции F(δ) определяются сходимостью интеграла в (1). В приложении к линейным САУ, когда f(t) представляет собой ее временную динамическую характеристику, сходимость обеспечивается выбором соответствующего значения параметра С. Так, для устойчивой системы, имеющей импульсную переходную характеристику k(t)=f(t), можно принять С=0. В случае использования переходной характеристики h(t)=f(t) устойчивой системы условие сходимости интеграла определяется тоже достаточно просто: δ∈(0,∞] или С>0.
Для перехода от моделей систем в терминах вещественных функций-изображений к их дискретным представлениям и обратно, ориентированным на цифровые структуры, используется интерполяционный подход. С этой целью для функции F(δ), δ∈[0,∞] задаются узлы δi, i=1, 2, .... и находятся значения  η=m+n+1. Получаемое множество
η=m+n+1. Получаемое множество

называется численной характеристикой функции F(δ), а число η ее элементов - размерностью ЧХ.
Для эффективного использования вещественных функций F(δ) и их численных характеристик важно знать их положительные особенности и свойства. Приведем некоторые.
а) Получить функции F(δ) можно по формуле прямого δ-преобразования (1), а также по лапласовым изображениям F(p). В последнем случае результат можно получить путем формальной замены переменной р на δ∈[С,∞],С≥0, рассматривая преобразование (1) как частный случай преобразования Лапласа. Эта особенность является особенно важной, потому что она позволяет использовать для получения F(δ) всю имеющуюся библиотеку соответствий оригиналов и изображений по Лапласу, созданную к настоящему времени.
б) Функции F(δ) имеют графические представления, что делает их и действия над ними более наглядными по сравнению с изображениями F(p), что важно, например, при пуско-наладочных работах.
в) Функции F(δ) не содержат мнимой составляющей, поэтому численные способы действий над ними оказываются примерно в два раза более экономичными по сравнению с изображениями по Фурье и Лапласу.
г) Если функция f(t) в (1) является импульсной реакцией системы, то изображение F(δ) имеет смысл вещественной передаточной функции W(δ).
Совокупность подходов, приемов и алгоритмов расчета и исследования динамических систем, основанная на применении вещественного преобразования и интерполяционных процедур, получила название вещественного интерполяционного метода (ВИМ). Более подробные сведения о методе и решении задач на его основе изложены в [5]. Ниже показано применение ВИМ для решения трех основных задач, возникающих при самонастройке, - идентификации, формирования желаемой передаточной функции и расчета параметров регулятора.
Идентификации объекта управления
Для рассмотрения первой задачи обратимся к части функциональной схемы, представленной на фиг.1, включающей объект управления 1, блоки 8 и 9 получения соответственно численных характеристик сигналов входа и выхода объекта управления, блок 5 получения модели объекта управления.
Задача идентификации реализована в параметрической постановке и включает в себя следующие этапы:
- определение по сигналам u(t) и у(t) их численных характеристик {U(δi)}η,i=1, 2, ..., η и {Y(δi)}η,i-1, 2, ..., η;
- вычисление по найденным моделям сигналов входа и выхода {U(δi)}η,i=1, 2, ..., η и {Y(δi)}η,i-1, 2, ..., η численной характеристики объекта управления {Woy(δi)}η;
- получение вещественной передаточной функции W(δ) объекта управления по численной характеристике {Woy(δi)}η.
Пусть объект описывается передаточной функцией (ПФ)

С целью упрощения пояснений положим, что входной сигнал системы u(t) отсутствует, а на вход объекта управления подан пробный сигнал upr(t). Тогда для сигналов upr(t) и y(t) найдутся их вещественные изображения


а также вещественная передаточная функция объекта управления

Выражение (5) определяет элементы численной характеристики {Woy(δi)}η, поэтому можно считать найденной модель объекта управления в непараметрической форме.
На втором этапе параметрической идентификации необходимо получить коэффициенты вещественной ПФ (2). Для этого составим систему линейных алгебраических уравнений (СЛАУ) относительно неизвестных коэффициентов ak, bj, k=1, 2, ... n, j=0, 1, ... m:

Левая часть СЛАУ известна - она определена формулой (5) расчета элементов ЧХ объекта управления. Число уравнений η, входящих в СЛАУ, определяется соотношением η=n+m+1, полученные в результате решения системы уравнений (6) значения коэффициентов аk, bj являются коэффициентами вещественной ПФ (2). Для перехода к лапласовой ПФ достаточно заменить вещественную переменную δ на комплексную р. Анализ полученного результата производится в области времени, для чего полученную передаточную функцию модели объекта управления подвергают обратному преобразованию Лапласа и сравнивают с экспериментальной характеристикой у(t) по одному из известных методов, в предложенном алгоритме используется минимаксный критерий адекватности. Минимаксный критерий оперирует функцией ошибки

где уm(t) - переходная характеристика модели объекта управления, y(t)-экспериментальная переходная характеристика объекта управления.
Критерий адекватности имеет вид

где tв - время, в течение которого проводился эксперимент, Аmax - максимальное допустимое значение критерия в относительных единицах.
Для иллюстрации работоспособности заявляемого способа рассмотрим численный пример идентификации. Зададимся значением критерия адекватности Аmax=0.1. Пусть на объект управления 1 разомкнутой системы подан ступенчатый управляющий сигнал Uпр, который вызывает в ней переходный процесс (график 1, Фиг.8). На выходе объекта в блоке 18 записи и фильтрации выборки фиксируется переходная характеристика амплитуды напряжения сигнала, в виде выборки hoy,(tr),r=1, ... 99, отраженной в таблице:
Передаточная функция модели объекта управления определяется в виде

С целью уменьшения объема вычислений коэффициент b0 может быть найден непосредственно по установившемуся среднему значению переходной характеристики: b0=141, которое может быть получено при подаче на вход объекта управления нормированного ступенчатого сигнала u(t)=1. Определению подлежат оставшиеся три коэффициента b1, a2, a1, поэтому в блоке 8 по методике, изложенной в [5] книге: Гончаров В.И. Вещественный интерполяционный метод синтеза систем автоматического управления. - Томск: Изд. ТПУ, 1995. 108 с., задаемся системой из трех узлов интерполирования со следующими значениями: δ1=1.95, δ2=3.9, δ3=5.85 и находим значения элементов численной характеристики входного сигнала как произведения входного сигнала на узлы интерполирования: U(δ1)=1.25, U(δ2)=1.86, U(δ3)=3.75. В блоке 9 получения численной характеристики выходного сигнала, используя выражение (4), получаем значения элементов численной характеристики выходного сигнала: Y(δ1)=26.2, Y(δ2)=11.8, Y(δ3)=2.4.
Далее в блоке 5 получения модели объекта управления согласно (5) составляется и решается СЛАУ:

В результате решения системы уравнений определяются значения искомых коэффициентов: а2=0.53, a1=1.9, b2=0.82.
Затем в блоке 24 по найденным коэффициентам передаточной функции модели вычисляется ее переходная характеристика. В блоке сравнения 25 по формуле (7) вычисляется критерий адекватности, равный 0.031, что меньше заданного Аmax=0.1. Результат решения задачи идентификации иллюстрируется графиками экспериментальной и модельной переходных характеристик, которые представлены на фиг.8.
Получение желаемой передаточной функции системы
Это вторая задача из трех основных. Суть ее состоит в формировании передаточной функции эталонной системы, к свойствам которой должен приближаться в процессе настройки основной контур системы. Исходными данными для решения задачи служат задаваемые оператором на этапе пусконаладочных работ показатели качества и точности системы, а также полученная экспериментальным путем текущая передаточная функция объекта управления.
Задача имеет два основных этапа. На первом по заданным показателям качества, например, перерегулированию σ и времени установления переходного процесса определяются элементы численной характеристики эталонной системы  . На втором этапе находятся коэффициенты желаемой передаточной функции.
. На втором этапе находятся коэффициенты желаемой передаточной функции.
Расчетная формула для выполнения первого этапа получена на основе известной связи межу передаточной функцией и переходной характеристикой и имеет вид

где введены обозначения, смысл которых раскрывается зависимостями



и параметрами, указанными на графике фиг.8. На втором этапе находятся коэффициенты желаемой передаточной функции

путем решения системы уравнений

Формальная замена переменной δ на р приводит к получению лапласовой передаточной функции
В условиях минимизации вычислительных затрат при самонастройке системы в последующем будет целесообразно использовать передаточную функцию разомкнутого контура. Она находится по известному соотношению размыкания
в котором одновременно учитывается требование астатизма, если оно имеется.
Рассмотрим расчетный пример получения желаемой передаточной функции. Задаемся показателями качества переходного процесса (задание желаемых показателей качества системы, фиг.1, блок 10): перерегулирование σз=0.1±0.01 (в относительных единицах), время установления  . Коэффициент передачи замкнутой системы К=100. Структура желаемой передаточной функции
. Коэффициент передачи замкнутой системы К=100. Структура желаемой передаточной функции  Так как коэффициент b0 найдется из уравнения статики (по установившемуся значению переходной характеристики желаемой системы) и равен 100, то определению подлежат три коэффициента ПФ: а2, a1, b2.
Так как коэффициент b0 найдется из уравнения статики (по установившемуся значению переходной характеристики желаемой системы) и равен 100, то определению подлежат три коэффициента ПФ: а2, a1, b2.
Задаемся системой из трех узлов интерполирования со следующими значениями: δ1=2.52, δ2=5.05, δ3=7.57. Используя выражение (9), в блоке расчета коэффициентов передаточной функции модели системы 13 получаем значения элементов численной характеристики: 

Составляем СЛАУ:
и находим неизвестные коэффициенты ПФ: а2=0.18, a1=0.52, b1=20.08.
Используя полученные коэффициенты для проверки путем решения обратной задачи (вычисление переходной характеристики модели с найденными коэффициентами в блоке 14), получили следующие результаты:
- перерегулирование σ=0.09998;
- время регулирования  ;
;
- коэффициент передачи замкнутой системы К=100.
Такие параметры можно считать удовлетворительными, поэтому задача считается решенной. Полученные коэффициенты поступают на хранение в блок 15.
Определение вида передаточной функции регулятора и значений ее коэффициентов
Третья, последняя из рассматриваемых задач настройки регулятора состоит в вычислении таких его параметров, при которых система будет иметь заданные показатели качества и точности. Исходными данными для ее решения служат полученные ранее передаточные функции - эталонной системы в разомкнутом состоянии и объекта управления.
Задача настройки регулятора сводится к решению уравнения:

где  , Wp(p), Woy(p) - передаточные функции соответственно желаемой (эталонной) замкнутой системы, регулятора и объекта управления системы, Кос - коэффициент обратной связи, равный обратному значению коэффициента передачи замкнутой системы.
, Wp(p), Woy(p) - передаточные функции соответственно желаемой (эталонной) замкнутой системы, регулятора и объекта управления системы, Кос - коэффициент обратной связи, равный обратному значению коэффициента передачи замкнутой системы.
В вычислительном отношении более выгодно использовать уравнение синтеза разомкнутой системы

где  является передаточной функцией разомкнутой системы.
является передаточной функцией разомкнутой системы.
Задача поиска функции Wp(p) имеет две части: структурную и параметрическую. Обе решаются последовательным приближением к искомому результату.
Структурная часть заключается в нахождении параметров μ, ν передаточной функции регулятора

С целью получения рационального по критерию вычислительных затрат решения его поиск начинается с динамического регулятора минимальной сложности: μ=ν=1 (ПИ-регулятор). В этом случае уравнение (12) принимает вид

При таких исходных данных задача сводится к вычислению коэффициентов b1, b0. Для их определения уравнение (13) переводится на основе ВИМ в вещественную область путем замены р→δ, δ∈[0,∞] и принимает вид:

Это позволяет развернуть уравнение в систему линейных алгебраических уравнений относительно 2 неизвестных коэффициентов b1, b0, пользуясь возможностями дискретизации ВИМ:
Значения δi могут быть определены, например, на равномерной сетке по формуле  где δв - верхняя граница расположения узлов интерполирования δi∈[0,δв], δв=δη, η=2.
где δв - верхняя граница расположения узлов интерполирования δi∈[0,δв], δв=δη, η=2.
Рассчитанные таким образом коэффициенты позволяют получить передаточную функцию регулятора и замкнутой настраиваемой системы. Однако свойства системы могут не отвечать предъявляемым требованиям, например, значение ведущего параметра системы - перерегулирования - может выходить за требуемые пределы. Поэтому организуется параметрическая настройка решения, которая заключается в изменении по определенному правилу значений узлов интерполирования. В результате будет достигнута одна из двух ситуаций. Первая - перерегулирование настраиваемой системы совпадает с требуемым с заданной точностью. В этом случае решение считается найденным. Вторая ситуация - заданная точность настройки не достигнута. Тогда порядок передаточной функции регулятора автоматически увеличивается на единицу и повторяется автоматическая итерационная параметрическая процедура настройки. Последовательное усложнение регулятора составляет содержание структурной итерационной процедуры настройки. В совокупности они обеспечивают достижение заданных значений параметров системы.
В качестве иллюстративного примера рассмотрим задачу получения коэффициентов регулятора, когда передаточные функции эталонной системы и объекта управления известны (из примеров, рассмотренных выше), а передаточная функция регулятора имеет вид

Регулятор должен обеспечивать перерегулирование системы σc=σз+0.1. Передаточная функция регулятора может быть представлена в виде:

причем коэффициент b0 регулятора может быть найден в блоке 26 вычисления коэффициентов регулятора как отношение соответствующих коэффициентов желаемой разомкнутой передаточной функции и передаточной функции модели объекта управления: b0=312.38/141=2.21. Таким образом, определению подлежит лишь один коэффициент b1.
Первое значение узла интерполирования на первой итерации δ1=1,5 вычисляется автоматически с учетом полученного ранее результатата времени регулирования  Вычислим значения элементов численных характеристик, входящих в выражение (15):
Вычислим значения элементов численных характеристик, входящих в выражение (15):
- 
- 
- 
Получив уравнение относительно неизвестного коэффициента  определяем его: b1=6.42.
определяем его: b1=6.42.
Данные поступают в блок 27, где по формуле (11) находится передаточная функция замкнутой системы, и далее в блок 24, где находится ее переходная характеристика. Перерегулирование определяется как максимальное значение переходной характеристики модели управления относительно ее установившегося значения и равно σ=0.21, что существенно больше требуемого. Это свидетельствует о необходимости параметрической настройки. В рамках ее реализации происходит итеративное изменение значения узла интерполирования. На каждой итерации (1...i) происходит вычисление численных характеристик, находится неизвестный коэффициент регулятора. Затем данные поступают в блок 27 вычисления коэффициентов системы управления, где находится передаточная функция замкнутой системы, и далее в блок 24 вычисления переходной характеристики модели объекта управления, где находится ее переходная характеристика, по которой вычисляется перегулирование. В рассматриваемом примере при i-й итерации значение узла интерполирования δ1=0.95. Вычислим значения элементов численных характеристик, входящих в выражение (15):
- 
- 
- 
Решаем уравнение относительно неизвестного коэффициента:
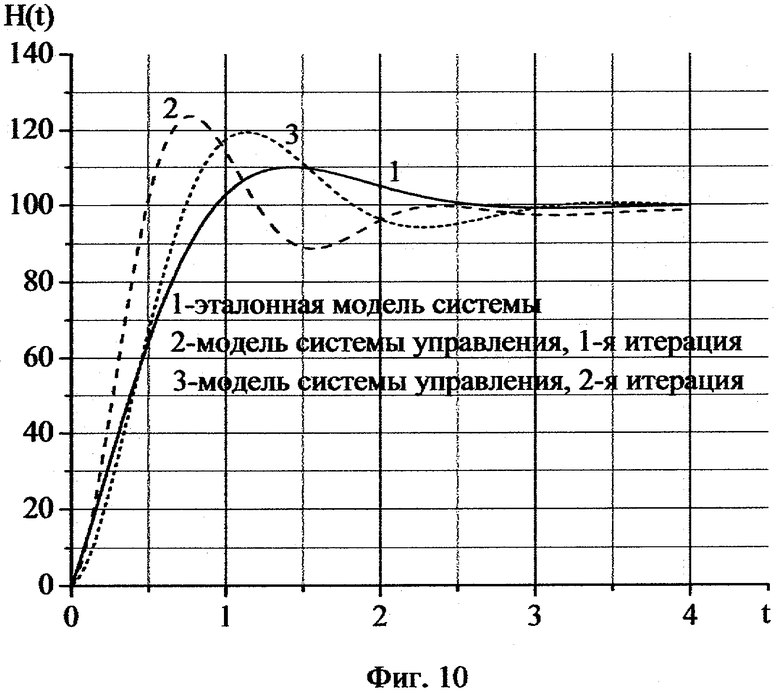
 и находим: b1=3.6. Вновь находим переходную характеристику системы с такой настройкой регулятора и получаем перерегулирование σ=0.16, что меньше полученного на первой итерации, но больше требуемого. Графики переходных характеристик эталонной и синтезированных систем показаны фиг.10.
и находим: b1=3.6. Вновь находим переходную характеристику системы с такой настройкой регулятора и получаем перерегулирование σ=0.16, что меньше полученного на первой итерации, но больше требуемого. Графики переходных характеристик эталонной и синтезированных систем показаны фиг.10.
Дальнейшее изменение значений узла интерполирования в рассматриваемом примере не приводит к желаемому результату, следовательно, необходимо перейти к структурной процедуре настройки, для этого в блоке вычисления коэффициентов регулятора 26 происходит увеличение порядка структуры регулятора:

Коэффициент b0 регулятора, как и прежде, может быть найден сразу как отношение соответствующих коэффициентов желаемой ПФ и ПФ модели объекта управления: b0=312.38/141=2.21. Таким образом, определению подлежат три коэффициента b2, b1, a2.
Задаемся системой из трех узлов интерполирования со следующими значениями: δ1=1.75, δ2=3.5, δ3=5.25. Вычислим значения элементов численных характеристик:
- 
- 
- 
Составляем СЛАУ:
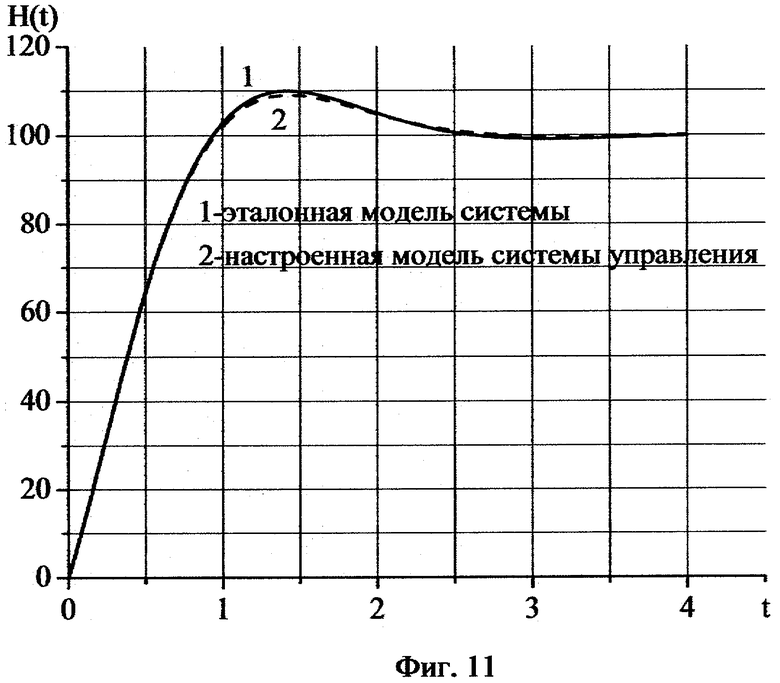
и находим неизвестные коэффициенты ПФ: b2=0.445, b1=3.246, a2=0.019. Путем замены вещественной переменной δ на комплексную р перейдем к уравнению замкнутой системы и найдем переходную характеристику. Ее график показан на фиг.11.
Полученное перерегулирование синтезированной системы σс=0.0909 и время переходного процесса  удовлетворяют исходным условиям, поэтому задача решена и найденные коэффициенты поступают в блок 2 регулятора.
удовлетворяют исходным условиям, поэтому задача решена и найденные коэффициенты поступают в блок 2 регулятора.
Заявляемые способ самонастройки и устройство для его реализации позволяют повысить быстродействие вычислений и точность работы системы за счет использования непараметрической формы представления моделей сигналов, системы и ее элементов, уменьшения объема вычислений и реализации алгоритма настройки системы по прямым показателям качества.
Источники информации
1. Шубладзе A.M., Попадько В.Е., Гуляев С.В., Шубладзе А.А. Оптимальный автоматически настраивающийся общепромышленный регулятор (регулятор ОАОР) // Средства измерения, автоматизации, телемеханизации и связи. - 2002. - №7. - С.2-5.
2. Мань Н.В., Чыонг Л.С.Настройка регуляторов по переходной характеристике замкнутой системы с уточненной моделью объекта // Теплоэнергетика. - 1998. - №7. - С.55-58.
3. Шубладзе A.M., Гуляев С. В., Ольшванг В.Р., Шубладзе А.А. Автоматически настраивающийся адаптивный промышленный регулятор (АНАП регулятор) // Приборы и системы. Управление, контроль, диагностика. - 2005. - №3. - С. 32-35.
4. «Способ оптимальной автоматической настройки системы управлениям», патент РФ №2243584, МПК G05B 13/00, опубл. 27.12.2004.
5. Гончаров В.И. Вещественный интерполяционный метод синтеза систем автоматического управления. - Томск: Изд. ТПУ, 1995.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2578630C2 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ ПИД-РЕГУЛИРОВАНИЯ | 2014 |
|
RU2568386C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| СПОСОБ ОПТИМАЛЬНОЙ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2003 |
|
RU2243584C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| Способ расширения диапазона регулирования АСР без потери устойчивости | 2016 |
|
RU2619746C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕГУЛЯТОРА | 2019 |
|
RU2714567C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |



Изобретения относятся к области автоматического управления и регулирования различными объектами. Технический результат заключается в подаче управляющего воздействия на объект, определении параметров модели объекта управления на основе его реакции на управляющее воздействие и вычислении значений настраиваемых параметров системы управления. Самонастраивающаяся система управления объектом содержит объект управления, регулятор, устройство сравнения задающего сигнала и сигнала обратной связи, блок вычисления оптимальных настроек, блок получения модели объекта управления, блок управления контуром самонастройки, сумматор, блок управления контуром самонастройки, блок получения численной характеристики входного сигнала объекта управления, блок получения численной характеристики выходного сигнала объекта управления, блок получения модели объекта управления, блок построения эталонной модели системы, источник задающего сигнала. 2 н. и 12 з.п. ф-лы, 11 ил., 1 табл.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| RU 2002289 C1, 30.10.1993 | |||
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| Самонастраивающаяся система | 1988 |
|
SU1606963A2 |
| Справочник по теории автоматического управления./ Под | |||
| ред | |||
| А.А | |||
| Красовского | |||
| - М.: Наука, 1987, с.480-482 | |||
| US 4441151 А, 03.04.1984 | |||
| Способ заглубления в грунт подводных трубопроводов | 1956 |
|
SU104845A1 |

