Изобретение относится к области автоматики и может быть использовано в автоматических системах регулирования (АСР) технологических параметров в машиностроении, металлургической, химической, энергетической, нефте- и газоперерабатывающей, пищевой и других отраслях промышленности.
Техническим результатом является расширение диапазона регулирования АСР без потери устойчивости при изменении свойств объекта регулирования и/или при появлении значительных возмущений как по нагрузке, так и по каналу регулирования. Он достигается на основе коррекции пропорциональной и интегральной составляющих регулирующего сигнала, причем корректирующие воздействия происходят в соответствии со значениями степенной функции для пропорциональной составляющей ПИ-регулятора, а интегральной составляющей - с помощью обратно пропорциональной степенной зависимости, аргументом которой является текущая ошибка регулирования.
Подавляющее большинство выпускаемых и эксплуатируемых регуляторов в АСР реализуют в своей программе ПИД-закон регулирования. Регуляторы с ПИД-законом регулирования являются по-существу единственными регуляторами, используемыми на практике в системах автоматического управления технологическими процессами. Широкое применение ПИД-закона обусловлено тем, что алгоритм их функционирования удачно имитирует работу опытного человека-оператора.
У регуляторов, выполненных на микропроцессорной основе, например Siemens серии S7, широко применяется ПИД-закон регулирования. В таких регуляторах предусматривается такая сервисная функция, как настройка их параметров по команде оператора с возможностью программного задания этих настроек.
Недостатком данных регуляторов является неизменность настроек как при больших, так и при незначительных возмущениях, что обуславливает ограниченность области устойчивой работы АСР, а показатели качества переходного процесса ухудшаются. Наиболее значительное ухудшение качества регулирования проявляется при изменении параметров объекта регулирования.
При изменении свойств объекта регулирования и при появлении значительных возмущений как по нагрузке, так и по каналу регулирования коэффициенты настройки системы должны изменяться, однако формирование управляющего воздействия регулятором остается неизменным как в установившемся, так и в переходном режимах, что приводит к увеличению колебательности, перерегулирования и времени регулирования.
Известны способы настройки параметров регулятора с идентификатором, включающие идентификацию объекта управления путем подачи на объект возмущающих воздействий определенного вида, например ступенчатых, с фиксацией реакции объекта на эти возмущения, расчет оптимальных параметров настройки регулятора по полученной динамической модели объекта и сравнение найденных параметров с уже установленными ранее, причем, если сравниваемые параметры отличаются, то устанавливают вновь найденные параметры настройки и повторно проводят идентификацию объекта, а если нет, то процесс коррекции параметров прекращают и переводят систему в рабочий режим.
Недостатком известного метода является использование моделей с недостаточным числом параметров, которые не учитывают всех свойств объекта, что приводит к установке не соответствующих объекту настроек и, как следствие, плохому качеству управления.
Известны также способы самонастройки, основанные на классическом методе Циглера-Никольса [Ziegler J.G., Nichols N.B. Optimum Setting for Automatic Controllers, Trans. ASME, 64, 759, (1942)] и его модификациях. Суть этих способов состоит в том, что замкнутая система вводится в колебательный режим, определяются значения критического коэффициента усиления Ккр и критического периода колебаний Ткр. Затем, в соответствии с [Ziegler J.G., Nichols N.B. Optimum Setting for Automatic Controllers, Trans. ASME, 64, 759, (1942)], определяются оптимальные настройки для типовых линейных регуляторов, выраженные через Ккр и Ткр:



Способы определения Ккр и Ткр могут быть различными. Критический коэффициент усиления Ккр определяется путем вывода системы на границу устойчивости [Ziegler J.G., Nichols N.B. Optimum Setting for Automatic Controllers, Trans. ASME, 64, 759, (1942)] при варьировании коэффициента усиления регулятора. В работах [Микропроцессорный контроллер Ремиконт-130, НИИТЕПЛОПРИБОР. - М., 1990, Семенец В.П. Способ автоматической настройки системы регулирования. Патент РФ №2002289. Бюл. №39-40. 1993] система переводится в режим двухпозиционного регулирования, при котором в системе возникают автоколебания с параметрами, используемыми для настройки регулятора. На вход объекта подается пробный гармонический сигнал с изменяемой частотой колебаний [Мазуров В.М. Самонастраивающаяся система управления. Патент РФ №2068196. Бюл. №29. 1966]. Частота колебаний выбирается так, чтобы обеспечить критическую частоту объекта, при которой фазовый сдвиг между входом и выходом равен 3.14 рад.
Недостатком этих способов самонастройки является длительность процесса идентификации, связанная со статистическим анализом нескольких периодов автоколебаний. Для повышения точности определения Ккр и Ткр может потребоваться несколько итераций, что также затягивает процесс самонастройки. Метод не подходит для объектов, динамические характеристики которых зависят от знака ошибки регулирования. К таким объектам относится, например, широкий класс тепловых объектов (печи, нагреватели, стерилизаторы и т.д.), для которых процессы нагрева и охлаждения могут иметь совершенно разные характеристики и требуют разных настроек регулятора для нагрева и охлаждения. В рассматриваемых методах параметры автоколебаний усредняются по положительным и отрицательным полуволнам и в результате определяются некоторые средние значения настроек, не соответствующие ни процессу нагрева, ни процессу охлаждения. Во всех рассматриваемых методах после определения двух параметров Ккр и Ткр используются формулы Циглера-Никольса для расчета настроек регулятора. Эти формулы носят эмпирический характер и рассчитаны на объекты с отношением τ/Т от 0 до 0,3, поэтому они не гарантируют качественное управление для объектов с большим запаздыванием. Кроме того, в случае ПИД-регулятора три настройки К, ТИ, ТД определяются всего по двум параметрам Ккр и Ткр, что указывает на неадекватность полученных настроек реальному объекту управления.
В малоинерционных объектах (относительно скорости перемещения регулирующего органа) при больших возмущениях, близких к ступенчатым, регулируемая величина изменяется достаточно быстро. Возникает ситуация, когда интегральная составляющая управляющего воздействия копится быстрее, чем регулирующий орган успевает отработать. В результате в системе возникают колебания или даже потеря устойчивости.
Известен способ коррекции систем автоматического регулирования (Патент RU 2234116 C1), в котором, при уменьшении текущей ошибки регулирования до значения, равного или меньше заданного, происходит изменение сигнала в цепи обратной связи, который формируется как произведение скорости изменения выходного параметра объекта на уменьшенный фиксированный коэффициент, что переводит переходный процесс в монотонный. Данный прием увеличивает устойчивость системы в установленных пределах отклонения стабилизируемого параметра объекта от заданного и ускоряет устранение отклонения в случае превышения им заданного значения, но ослабляет пропорциональную и дифференциальную составляющую сигнала управления, увеличивая погрешность стабилизации регулируемого параметра в установившемся состоянии.
Известен способ расширения границ устойчивой работы АСР, реализуемый при настройке регулятора по минимальному времени регулирования [Варламов И.Г. НПО "Техноконт". Каким критерием оптимизации переходных процессов в САР эффективнее пользоваться на практике? / И.Г. Варламов // Промышленные АСУ и контроллеры. - 2005. - N 5. - С. 56-57].
Переходные процессы регулирования регуляторов, настроенных методом минимального времени регулирования, приобретают апериодический характер. При возмущении по «нагрузке» он характеризуется большей устойчивостью АСР. Время действия единственной полуволны (при возмущении по «нагрузке») существенно больше времени действия первой полуволны при других методах настройки. Для переходных процессов апериодического вида характерно увеличение погрешности стабилизации регулируемого параметра в установившемся состоянии.
Технический результат, на достижение которого направлено изобретение, заключается в расширении границ устойчивой работы АСР и сохранении допустимых показателей качества регулирования автоматической системы при изменении характеристик объекта, а также при появлении увеличенных возмущающих воздействиях на систему стабилизации регулируемой величины как при переходных процессах, так и в установившемся режиме.
Для достижения технического результата производят не общее «ослабление» настроек регулятора, а корректировку пропорциональной и интегральной составляющих сигнала управления как функции текущей ошибки регулирования в выбранной области значений от заданного до нулевого значения.
Отличительный признак предлагаемого способа от указанных выше известных способов заключается не в общем ослаблении настроек регулятора, а в коррекции пропорциональной и интегральной составляющих сигнала управления в зависимости от текущей ошибки регулирования в широком диапазоне значений текущей ошибки регулирования при изменении коэффициентов регулятора, в процессе его работы.
Предложенный способ поясняется блок-схемой АСР (Фиг. 1), реализующей ПИ-закон регулирования с коррекцией текущей ошибки регулирования по предлагаемому способу. Система содержит элемент сравнения 2, входы которого подключены к задатчику 1 стабилизируемого параметра и к выходу объекта управления 4. Выход элемента сравнения 2 соединен с входами блока регулятора 3 и блока 5 коррекции параметров Кр и Ти регулятора относительно текущей ошибки регулирования по нелинейным функциям, характеризующим объект регулирования.
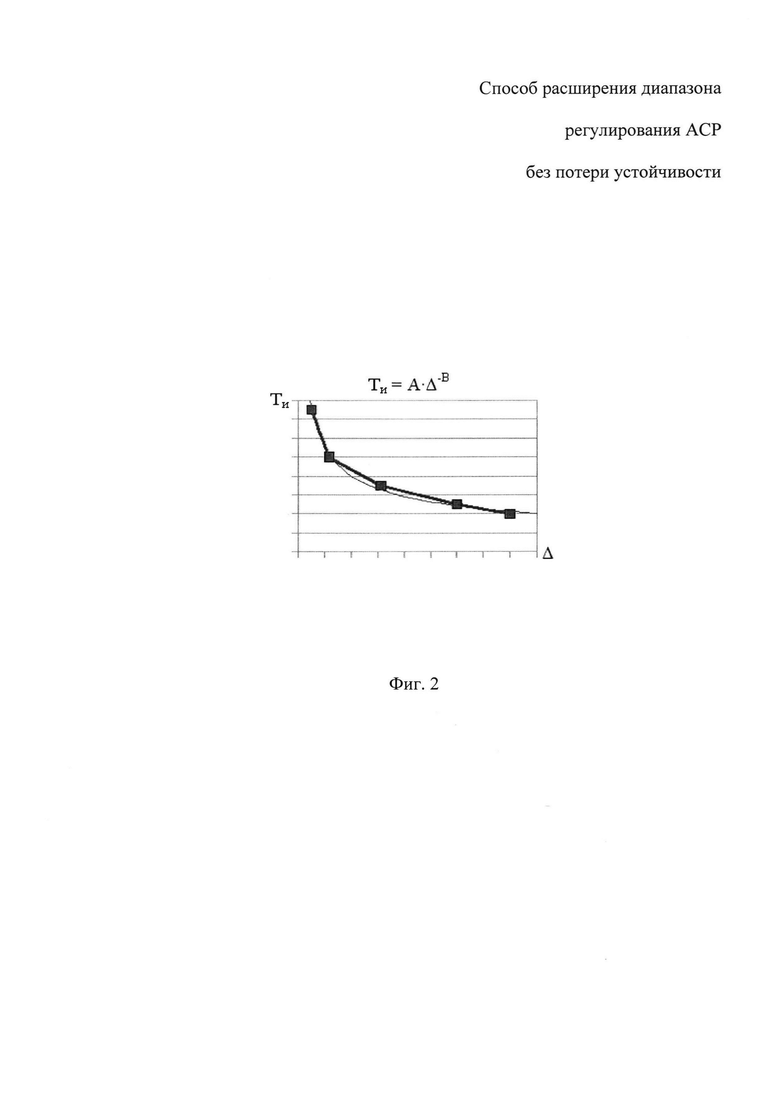
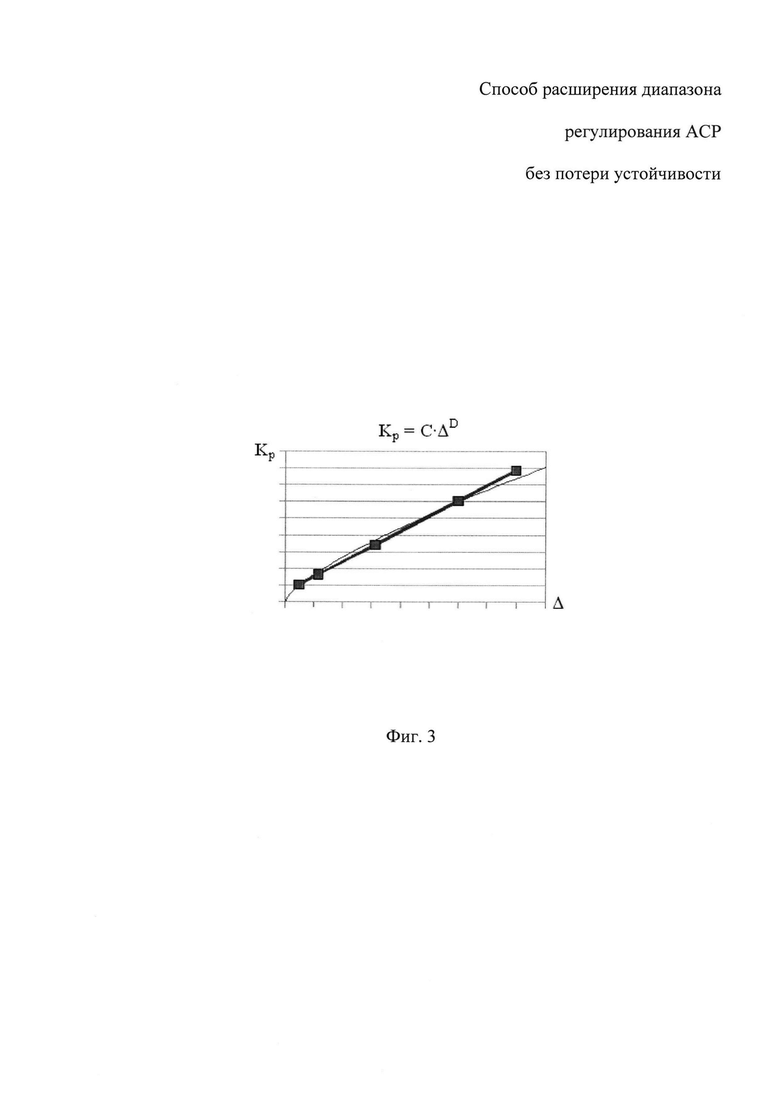
Более подробно действие блока коррекции текущей ошибки регулирования пояснены следующим примером. Например, если определить через определенный шаг величины перепадов регулируемой величины в определенном диапазоне и оптимальные параметры регулирования для этих перепадов, по которым известными методами аппроксимации могут быть представлены следующие степенные зависимости:  ,
,  , то можно будет определить приближенные к оптимальным параметры регулятора, при которых достигается требуемый коэффициент корреляции, на всем диапазоне регулирования, что поясняется на Фиг. 2 и Фиг. 3.
, то можно будет определить приближенные к оптимальным параметры регулятора, при которых достигается требуемый коэффициент корреляции, на всем диапазоне регулирования, что поясняется на Фиг. 2 и Фиг. 3.
Таким образом, использование предлагаемого способа расширения диапазона регулирования АСР предотвращает потерю устойчивости при сохранении допустимых показателей качества регулирования автоматической системы в случае изменения характеристик объекта, а также при появлении увеличенных возмущающих воздействий на систему стабилизации регулируемого параметра как при переходных процессах, так и в установившемся режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА УСТОЙЧИВОЙ РАБОТЫ АСР | 2008 |
|
RU2388037C1 |
| СПОСОБ ОПТИМАЛЬНОЙ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2003 |
|
RU2243584C2 |
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2000 |
|
RU2161326C1 |
| СПОСОБ И УСТРОЙСТВО НАСТРОЙКИ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ (САРД) В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ ДЛЯ ПЕРЕКАЧИВАНИЯ НЕФТЕПРОДУКТОВ | 2014 |
|
RU2578297C1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Устройство для регулирования состава формовочных растворов | 1973 |
|
SU467951A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| СПОСОБ КОРРЕКТИРОВКИ ПРОПУСКНОЙ ХАРАКТЕРИСТИКИ РЕГУЛИРУЮЩЕГО КЛАПАНА | 2007 |
|
RU2339068C1 |

Изобретение относится к автоматике. Способ расширения диапазона регулирования автоматических систем регулирования без потери устойчивости включает настройку регулятора, реализующего пропорциональную и интегральную составляющие закона регулирования, при которой сигнал управляющего воздействия зависит от величины ошибки регулирования и значений коэффициентов пропорциональной и интегральной составляющих. Сигнал управляющего воздействия формируют, корректируя значения коэффициентов пропорциональной и интегральной составляющих. Корректирующие воздействия происходят в соответствии со значениями степенной функции для пропорциональной составляющей ПИ-регулятора, а интегральной составляющей - с помощью обратно пропорциональной степенной зависимости, аргументом которой является ошибка регулирования. Для каждой составляющей закона регулирования в зависимости от значения ошибки величины пропорциональной и интегральной составляющих изменяются. Расширяется диапазон регулирования АСР. 3 ил.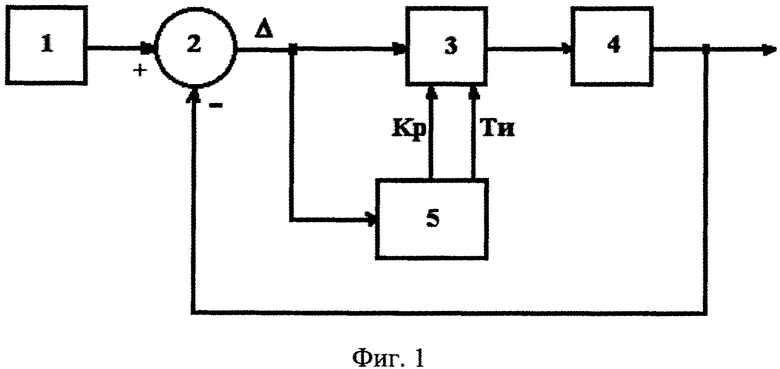
Способ расширения диапазона регулирования автоматических систем регулирования (АСР) без потери устойчивости путем коррекции параметров автоматического регулятора, включающий настройку регулятора, реализующего пропорциональную и интегральную составляющие закона регулирования, при которой сигнал управляющего воздействия зависит только от величины текущей ошибки регулирования и значений коэффициентов пропорциональной и интегральной составляющих закона регулирования, установленных при настройке регулятора, причем коэффициенты изменяются, отличающийся тем, что сигнал управляющего воздействия формируют, предварительно корректируя значения коэффициентов пропорциональной и интегральной составляющих закона регулирования относительно текущей ошибки регулирования перед поступлением ее на вход регулятора, причем корректирующие воздействия происходят в соответствии со значениями степенной функции для пропорциональной составляющей ПИ-регулятора, а интегральной составляющей - с помощью обратно пропорциональной степенной зависимости, аргументом которой является текущая ошибка регулирования, при этом для каждой составляющей закона регулирования в зависимости от значения текущей ошибки величины пропорциональной и интегральной составляющих изменяются на приближенные к оптимальным.
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА УСТОЙЧИВОЙ РАБОТЫ АСР | 2008 |
|
RU2388037C1 |
| US 6894832 B1, 17.05.2005 | |||
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА ГЛАВНЫХ ПРИВОДОВ ПРОКАТНОГО СТАНА | 2011 |
|
RU2504447C2 |
| Центробежная регулируемая форсунка | 1980 |
|
SU943481A1 |
| БАРАНЧУК Е | |||
| И | |||
| ПРОЕКТИРОВАНИЕ И НАСТРОЙКА ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ | |||
| М.-Л.: Машгиз, 1963 | |||
| Электромагнитный счетчик электрических замыканий | 1921 |
|
SU372A1 |
| с ил | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

