Перекрестные ссылки на родственные заявки
Настоящая заявка является частично-продолжающей по отношению к заявке на патент США с серийным №13/541,581, озаглавленной «ВСПОМОГАТЕЛЬНОЕ УПРАВЛЕНИЕ ТРАНСПОРТНЫМ СРЕДСТВОМ», поданной 3 июля 2012 года, содержание которой полностью и для любых целей включено в настоящую заявку посредством отсылки.
Область техники
Настоящая заявка относится к устройству и интерфейсу обучения вождению для использования в учебном транспортном средстве, в котором ученик является водителем, а инструктор - пассажиром.
Уровень техники и раскрытие изобретения
Учебные автомобили или транспортные средства для обучения вождению, в которых автоинструктор-пассажир обучает водителя-ученика вождению, содержат различные устройства, позволяющие инструктору перехватывать управление у ученика и предотвращать аварии. Эти устройства обычно представляют собой механические устройства с возможностью двойного управления системами управления транспортного средства, например, тормозными системами и системами сцепления. Учебные транспортные средства также могут содержать водительский интерфейс взаимодействия, позволяющий водителю-ученику взаимодействовать с органами управления транспортным средством без участия автоинструктора-пассажира. Подобные бортовые системы содействия водителю предназначены для дополнения знаний, полученных из справочников или учебников по вождению, и подготовки водителей-учеников к экзаменам по вождению (например, для получения водительских или ученических прав).
Один пример подобного устройства предложен Сато (Sato) в US 6,435,055. В нем тормозной рычаг механически соединен с тормозной педалью транспортного средства с возможностью вмешательства инструктора-пассажира в управление тормозной педалью водителем-учеником и осуществления торможения. Другой пример устройства раскрыт Боннаром (Bonnard) с соавторами в US 5,964,122. В нем механический датчик реагирует на действие стопы инструктора-пассажира, направляя электронный сигнал на механический элемент, при этом элемент осуществляет операцию торможения, включения сцепления и (или) ускорения, игнорируя тем самым тормозящее воздействие водителя-ученика.
Однако авторы настоящего изобретения выявили потенциальные недостатки таких систем. Например, указанные устройства позволяют игнорировать тормозящее воздействие водителя-ученика, но не позволяют игнорировать ускоряющее воздействие водителя-ученика. Поэтому инструктор вынужден прилагать тормозное усилие для игнорирования управляющего воздействия ученика на педаль акселератора. Это может значительно увеличить время, необходимое для остановки транспортного средства. В качестве другого примера, поскольку указанные устройства функционируют, задействуя механические компоненты, необходимы существенные доработки транспортного средства для включения в его состав преимущественно механических устройств. Это не только меняет внешний вид транспортного средства физически, но и ограничивает возможность переноса этого устройства с одного транспортного средства на другое. Кроме того, указанные доработки могут быть дорогостоящими, в связи с чем повышается стоимость учебного транспортного средства.
В одном примере некоторые из вышеуказанных недостатков можно преодолеть с помощью интерфейсной системы транспортного средства (например, выполненной в виде вспомогательного блока для транспортного средства), содержащей: пользовательское устройство ввода для получения запроса торможения от пассажира транспортного средства и преобразователь, соединенный с пользовательским устройством ввода, формирующий выходной сигнал на основе запроса торможения. Вспомогательный блок интерфейсной системы транспортного средства дополнительно содержит контроллер с программной логической схемой для приема выходного сигнала преобразователя и формирования одной или нескольких команд управления силовым агрегатом транспортного средства в соответствии с запросом торможения и направления указанных одной или нескольких команд управления силовым агрегатом транспортного средства в систему управления транспортного средства. Таким образом, предложено более простое и экономичное устройство для учебных транспортных средств.
Например, любое транспортное средство можно использовать как учебное, установив, с возможностью снятия, в его салоне (кабине) интерфейсную систему транспортного средства, выполненную в виде вспомогательного блока. Вспомогательный блок может содержать выполненное с возможностью съемной установки устройство ввода, например, педаль или кнопку, посредством которого пассажир транспортного средства, например, автоинструктор, может создать запрос торможения. Педаль вспомогательного блока может представлять собой педаль, не являющуюся тормозной педалью или педалью акселератора, фиксированно установленными в салоне транспортного средства, посредством которых водитель транспортного средства, например, водитель-ученик, может создать запрос торможения. Система управления транспортного средства выполнена с возможностью приема запроса момента от водителя-ученика через тормозную педаль и (или) педаль акселератора и соответствующего регулирования работы двигателя для создания необходимого момента. В ситуациях, когда водитель-ученик неспособен правильно реагировать на грозящее столкновение транспортных средств (например, водитель не нажимает достаточно быстро тормозную педаль или ошибочно нажимает педаль акселератора), авто инструктор может вмешаться и принять на себя управление транспортным средством, задействовав пользовательское устройство ввода. Установив связь с системой управления транспортного средства через преобразователь, контроллер вспомогательного блока может передать пассажирский запрос торможения в систему управления транспортного средства, в соответствии с которым система управления транспортного средства может отрегулировать выходной момент (например, выходной крутящий момент двигателя и выходной тормозной момент) путем направления соответствующих команд на блок управления двигателем и блок управления тормозами транспортного средства. В частности, когда и водитель-ученик, и инструктор-пассажир создают запросы момента, система управления транспортного средства может игнорировать и не принимать во внимание запрос момента от водителя-ученика и увеличивать тормозное усилие на транспортном средстве по запросу момента от инструктора, полученному через вспомогательный блок. Так система повышает эффективность содействия водителю при обучении. Таким образом, можно создать относительно простую с механической точки зрения систему, не требующую значительных доработок и экономичную, для использования в учебном транспортном средстве для повышения эффективности обучения вождению. Соединив, с возможностью связи, указанное вспомогательное устройство с имеющейся системой управления транспортного средства, имеющимися блоками управления двигателем транспортного средства (например, блоком регулирования частоты вращения, блоком управления тормозами и т.п.), можно обеспечить преимущество, состоящее в возможности для авто инструктора игнорировать управляющие воздействия водителя-ученика, в том числе управляющие воздействия через педаль акселератора, и управлять транспортным средством. Кроме того, используя указанное вспомогательное устройство, можно усовершенствовать схему содействия водителю. Благодаря снижению зависимости от механически соединенных компонентов, устройство становится более портативным, что позволяет использовать одно и то же устройство в разных учебных транспортных средствах. В целом, можно повысить безопасность учебного транспортного средства, используемого для обучения вождению, с одновременным снижением расходов.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание фигур чертежа
На ФИГ. 1-2 представлены примеры осуществления системы транспортного средства, содержащей учебное транспортное средство с возможностью управления водителем-учеником и инструктором-пассажиром и вспомогательный блок с возможностью съемной установки в транспортном средстве.
На ФИГ. 3 представлена высокоуровневая блок-схема способа для замедления учебного транспортного средства по водительскому запросу момента, полученному через педаль транспортного средства, и пассажирскому запросу момента, полученному через вспомогательный блок.
На ФИГ. 4 представлена высокоуровневая блок-схема способа для создания и отправки пассажирского запроса момента из вспомогательного блока системы управления транспортного средства.
На ФИГ. 5 представлены примеры операций торможения транспортного средства в системе транспортного средства согласно предлагаемому изобретению.
Осуществление изобретения
Предложена интерфейсная система транспортного средства для повышения безопасности пассажира в учебном транспортном средстве. Интерфейсная система транспортного средства, представленная ФИГ. 1-2, содержит транспортное средство с возможностью съемной установки вспомогательного блока. Система управления транспортного средства, установленная в транспортном средстве, выполнена с возможностью приема запроса торможения от водителя-ученика транспортного средства через напольную педаль. В транспортном средстве вспомогательный блок может быть установлен с возможностью связи с системой управления транспортного средства и передачи запроса торможения от инструктора-пассажира транспортного средства в систему управления транспортного средства, используя алгоритм управления, например, представленный на ФИГ. 4. Система управления транспортного средства может быть выполнена с возможностью выполнения алгоритма управления, например, алгоритма, пример которого представлен на ФИГ. 3, для формирования одной или нескольких команд замедления транспортного средства по запросу (запросам) торможения от водителя транспортного средства и (или) пассажира транспортного средства. Регулируя тормозной момент и крутящий момент двигателя в зависимости от входного сигнала торможения от водителя транспортного средства, полученного через напольную педаль, и входного сигнала торможения от пассажира транспортного средства, полученного через пользовательское устройство ввода, можно обеспечить необходимое замедление транспортного средства. Примеры операций замедления представлены на ФИГ. 5. С помощью переносного вспомогательного блока, водителя-ученика можно обучать вождению на любом транспортном средстве без необходимости значительных доработок его механической части.
На ФИГ. 1 изображена система 100 транспортного средства, содержащая транспортное средство 102 и вспомогательный блок 103 с возможностью соединения с транспортным средством. Например, как показано на примере ФИГ. 2, вспомогательный блок 103 может быть смонтирован или установлен внутри транспортного средства 102. В одном примере транспортное средство представляет собой учебное транспортное средство, на котором водителя-ученика обучает вождению транспортного средства автоинструктор, сидящий рядом с водителем-учеником на пассажирском сиденье транспортного средства. Транспортное средство 102 содержит салон 104. Транспортное средство также содержит тормозную педаль 108 и педаль 110 акселератора для получения запроса от водителя транспортного средства. Тормозная педаль 108 и педаль 110 акселератора фиксированно установлены в водительской зоне 112 салона 104.
Тормозная педаль 108 может быть механически соединена с тормозной системой 122 транспортного средства, содержащей колесные тормоза 126 для торможения колес 106 транспортного средства. Кроме того, тормозная педаль 108 может быть соединена электронными средствами с блоком управления тормозами системы 12 управления транспортного средства для обеспечения возможности электронно-управляемого торможения. В частности, тормозная педаль 108 может быть соединена с системой силового агрегата транспортного средства, содержащей как минимум такие компоненты силового агрегата, как двигатель 10 и коробка 14 передач, соединенные посредством узла 124 сцепления, через систему 12 управления транспортного средства. При нажатии водителем транспортного средства тормозной педали 108, система управления транспортного средства может увеличить усилие торможения транспортного средства путем повышения тормозного момента на колесе, тормозного момента двигателя и (или) снижения мощности двигателя. Например, в дополнение к включению колесных тормозов, система управления транспортного средства может отрегулировать положение дросселя, подачу топлива (количество, момент и т.п.) и (или) момент зажигания для увеличения тормозного усилия. Система 12 управления транспортного средства также может снизить выходной крутящий момент двигателя 10 и крутящий момент двигателя, передаваемый на колеса 106 транспортного средства через узел 124 сцепления и коробку 14 передач.
Система 12 управления транспортного средства также может применять электронно-управляемое торможение для регулирования торможения при отсутствии входных сигналов от водителя транспортного средства через тормозную педаль, а также когда входной сигнал от водителя транспортного средства через педаль акселератора (или тормозную педаль) игнорируют. Например, торможение можно регулировать независимо от входного сигнала от водителя транспортного средства через педаль (тормозную или акселератора) для целей обеспечения устойчивости транспортного средства (например, сцепления колес при езде по скользкой дороге, кривой дороге, во время дождя, снегопада и т.п.) и целей защиты двигателя (например, для снижения риска таких событий аномального сгорания, как детонация и преждевременное воспламенение).
Блок управления тормозами системы 12 управления транспортного средства может содержать различные средства для электронно-управляемого торможения. Например, в состав блока могут входить: система адаптивного круиз-контроля АКК (АСС), система торможения для предотвращения столкновений СТПС (CMbB) и система автоматического экстренного торможения для предотвращения столкновений в городских условиях «City Safety Stop» для торможения транспортного средства независимо от входных сигналов от его водителя для снижения риска угрожающего столкновения. Данные средства позволяют системе 12 управления транспортного средства изменять выходной момент для регулирования скорости транспортного средства в зависимости от условий эксплуатации транспортного средства (например, дорожной обстановки, погодных условий, состояния дороги и т.п.), определенных с помощью одного или нескольких бортовых или внешних датчиков. Например, такое средство, как система адаптивного круиз-контроля (АКК), выполнено с возможностью поддержания необходимой скорости транспортного средства путем ускорения на участках подъема и замедления на участках спуска без необходимости нажатия водителем транспортного средства педали акселератора на участках подъема или тормозной педали на участках спуска. В качестве другого примера, системы торможения для предотвращения столкновений (СТПС) и автоматического экстренного торможения для предотвращения столкновений в городских условиях (City Safety Stop) выполнены с возможностью выявлять угрожающее столкновение и снижать риск столкновения транспортного средства путем приложения частичного или максимального тормозного усилия для сведения к минимуму удара транспортного средства независимо от того, нажал водитель транспортного средства тормозную педаль или нет.
Аналогичным образом, педаль 110 акселератора может быть соединена с системой силового агрегата транспортного средства, в том числе с тормозной системой 122, системой сцепления, содержащей узел 124 сцепления, и системой 128 акселератора транспортного средства. Указанное соединение позволяет системе 12 управления транспортного средства уменьшать тормозной момент, прилагаемый к колесам, и увеличивать крутящий момент двигателя при нажатии педали 110 акселератора. В одном примере педаль 110 акселератора может быть механически соединена с системой 128 акселератора, а в других вариантах осуществления педаль акселератора может быть соединена с системой акселератора электронными средствами. Дополнительно или необязательно, педаль 110 акселератора может быть соединена электронными средствами с блоком управления двигателем и блоком управления тормозами системы 12 управления транспортного средства, что обеспечивает возможность электронного управления ускорением. В этом случае, при нажатии водителем транспортного средства педали 110 акселератора, система управления транспортного средства может уменьшить усилие торможения транспортного средства путем уменьшения тормозного момента на колесе и тормозного момента двигателя с одновременным увеличением выходной мощности двигателя. Например, система управления транспортного средства выполнена с возможностью регулирования положения дросселя, подачи топлива (количества, момента и т.п.), и (или) момента зажигания для снижения тормозного усилия и повышения отдачи двигателя 10 и коробки 14 передач на колеса 106.
Система управления транспортного средства также может содержать систему электронного управления для регулирования ускорения при отсутствии входного сигнала от водителя транспортного средства, полученного через тормозную педаль, а также регулирования ускорения без учета входного сигнала от водителя транспортного средства через педаль акселератора. Например, регулировать ускорение без учета входного сигнала от водителя транспортного средства через педаль можно в связи с необходимостью обеспечения той или иной скорости транспортного средства (например, при автоматическом поддержании необходимой скорости транспортного средства).
Транспортное средство 102 дополнительно содержит диагностический порт 120 в салоне 104 транспортного средства. Диагностический порт 120 может быть расположен, например, на стенке салона транспортного средства, на приборной панели салона транспортного средства, под сиденьем водителя транспортного средства и т.п. Диагностический порт 120 может представлять собой порт цифровой связи с возможностью передачи стандартизированных серий диагностических кодов неисправностей ДКН (DTCs), позволяющих быстро идентифицировать и устранять сбои в работе транспортного средства. Например, система 12 управления транспортного средства может периодически выполнять алгоритмы диагностики с помощью бортовых средств для проверки параметров функционирования различных компонентов транспортного средства. Если алгоритм диагностики выявит «отказ», может быть сформирован соответствующий диагностический код с возможностью получения через диагностический порт. Например, автослесарь сможет подключиться к диагностическому порту для получения перечня диагностических кодов, сформированных в процессе эксплуатации транспортного средства, и выполнить работы по техобслуживанию транспортного средства с их учетом.
Кроме того, диагностический порт 120 выполнен с возможностью связи с вспомогательным блоком 103. В частности, как подробнее раскрыто ниже, диагностический порт выполнен с возможностью связи с преобразователем 129 вспомогательного блока 103. В одном примере диагностический порт выполнен с возможностью беспроводной связи с преобразователем 129. Однако возможны и другие формы соединения с возможностью связи. Пассажир транспортного средства может сформировать запрос тормозного момента непосредственно после включения пользовательского устройства ввода вспомогательного блока 103. На основе запроса тормозного момента, преобразователь 129 может сформировать выходной сигнал и направить его на диагностический порт 120. Диагностический порт может быть соединен с возможностью связи с системой 12 управления транспортного средства, поэтому запрос тормозного момента, полученный на диагностическом порте, может быть далее передан в систему 12 управления транспортного средства. Затем указанная система управления может сформировать те или иные команды (например, команды управления силовым агрегатом) в соответствии с полученным запросом тормозного момента для регулирования тормозного усилия в зависимости от полученного запроса торможения. Система 12 управления транспортного средства может быть выполнена в виде микрокомпьютера, содержащего микропроцессорное устройство, порты ввода/вывода, электронную среду хранения (например, однокристальное постоянное запоминающее устройство) исполняемых программ и калибровочных значений, оперативное запоминающее устройство, энергонезависимое запоминающее устройство и шину данных. Система 12 управления транспортного средства может принимать разнообразные сигналы от бортовых и внешних датчиков транспортного средства. В их число могут входить, например, различные датчики, связанные с двигателем 10, коробкой 14 передач, педалью 110 акселератора, тормозной педалью 108, узлом 124 сцепления и т.п. В дополнение к указанным сигналам, в систему 12 управления транспортного средства могут быть введены машиночитаемые данные, представляющие собой команды с возможностью их выполнения процессорным устройством системы управления для реализации раскрытых в настоящем описании способов, а также других возможных, но конкретно не перечисленных вариантов. В их число могут входить команды для получения запроса момента от водителя транспортного средства (направляемого путем задействования тормозной педали и (или) педали акселератора) и запроса момента от пассажира транспортного средства (направляемого путем задействования одного или нескольких пользовательских устройств ввода вспомогательного блока). Система управления транспортного средства может дополнительно содержать команды для формирования различных команд управления силовым агрегатом в связи с получением указанных запросов момента и для регулирования работы транспортного средства и двигателя в соответствии со сформированными командами управления силовым агрегатом. Пример алгоритма, реализуемого системой 12 управления транспортного средства, подробно раскрыт на ФИГ. 4.
Вспомогательный блок 103 может представлять собой переносное устройство с возможностью съемной установки в транспортном средстве, например, транспортном средстве 102, для его использования в качестве учебного транспортного средства. В одном примере транспортное средство 102 выполнено с возможностью эксплуатации в качестве обычного транспортного средства, когда в нем не установлен вспомогательный блок 103, и в качестве учебного транспортного средства, когда в нем установлен вспомогательный блок 103. Переносимость вспомогательного блока 103 позволяет использовать любое транспортное средство в качестве учебного без необходимости масштабных и дорогостоящих доработок механической части транспортного средства с одновременным обеспечением безопасности транспортного средства, в частности, в ситуациях угрозы столкновения транспортного средства.
Вспомогательный блок 103 содержит одно или несколько пользовательских устройств ввода для получения запроса торможения от пассажира транспортного средства. Указанные одно или несколько пользовательских устройств ввода могут быть расположены в пассажирской зоне 114 салона 104 транспортного средства. В раскрытом варианте вспомогательный блок 103 содержит первое пользовательское устройство 116 ввода и второе пользовательское устройство 118 ввода. Однако в других вариантах осуществления число пользовательских устройств ввода может быть больше или меньше. Одно или несколько пользовательских устройств ввода могут представлять собой, в качестве неограничивающих примеров, педаль с возможностью разъемного соединения с полом салона транспортного средства, переключатель (или иное устройство двухпозиционного действия) с возможностью съемной установки на стенке или приборной панели салона транспортного средства, нажимную кнопку с возможностью съемной установки на стенке или приборной панели салона транспортного средства, переключатель (например, аварийный переключатель) с возможностью съемной установки на стенке или приборной панели транспортного средства и т.п. В примере на ФИГ. 2, первое пользовательское устройство ввода представляет собой напольную педаль, разъемно соединенную с полом салона транспортного средства в пассажирской зоне, а второе пользовательское устройство ввода представляет собой кнопку (в данном случае, нажимную "авариную" кнопку), съемно установленную на стенке (в данном случае -на приборной панели) салона 104 транспортного средства. Вспомогательный блок 103 может также содержать крепежное средство для съемной установки одного или нескольких пользовательских устройств ввода в салоне транспортного средства. В качестве неограничивающего примера, вспомогательный блок может содержать крепежное средство типа «липучка» для крепления педали 116 к полу салона 104 транспортного средства.
Как было раскрыто выше, вспомогательный блок 103 содержит преобразователь, соединенный с каждым из пользовательских устройств 116, 118 ввода. Например, вспомогательный блок может содержать первый преобразователь 129, соединенный с первым пользовательским устройством 116 ввода, и второй преобразователь 131, соединенный со вторым пользовательским устройством 118 ввода. Преобразователи 129, 131 формируют выходной сигнал при получении запроса торможения от пассажира транспортного средства через одно или несколько пользовательских устройств ввода. Затем любой из преобразователей 129, 131 направляет выходной сигнал, сформированный на основе запроса торможения, в контроллер 130 вспомогательного блока. В одном примере преобразователи 129, 131 могут передавать выходные сигналы в контроллер 130 по беспроводной связи, однако другие типы соединения с возможностью связи также возможны.
Контроллер 130 вспомогательного блока 103 может быть выполнен в виде микрокомпьютера, содержащего микропроцессорное устройство, порты ввода/вывода, электронную среду хранения (например, однокристальное постоянное запоминающее устройство) исполняемых программ и калибровочных значений, оперативное запоминающее устройство, энергонезависимое запоминающее устройство и шину данных. Контроллер 130 может содержать программную логическую схему для приема сигналов от преобразователя 129 и для формирования одного или нескольких сигналов, передаваемых в систему 12 управления транспортного средства, в зависимости от входного сигнала, полученного от преобразователя. Например, контроллер 130 может содержать программную логическую схему для приема выходного сигнала преобразователя (сформированного на основе запроса торможения, полученным от пассажира транспортного средства через пользовательские устройства ввода) и формирования одной или нескольких команд управления силовым агрегатом транспортного средства в соответствии с пассажирским запросом торможения. Контроллер 130 может дополнительно направлять указанные одну или несколько сформированных команд управления силовым агрегатом в систему 12 управления транспортного средства.
В одном примере контроллер 130 может быть соединен с возможностью связи с системой 12 управления транспортного средства по беспроводной связи, хотя возможны и другие формы соединения с возможностью связи.
Программная логическая схема в контроллере 130 вспомогательного блока 103 может включать в себя, например, логику квитирования для установления и подтверждения связи между преобразователем 129 и системой 12 управления транспортного средства. В некоторых вариантах осуществления логика квитирования может включать в себя передачу сообщений/сигналов между вспомогательным блоком 103 и системой 12 управления транспортного средства для направления положительного ответа от вспомогательного блока, свидетельствующего о том, что вспомогательный блок надлежащим образом подключен (например, подключен с возможностью связи) к системе 12 управления транспортного средства и готов к передаче входных сигналов от пассажира. Аналогичным образом, логика квитирования может дополнительно включать в себя передачу сообщений для получения положительного ответа от системы управления транспортного средства, указывающего на то, что система управления транспортного средства готова к приему входного сигнала от пассажира. В некоторых вариантах осуществления вспомогательный блок 103 может содержать индикатор 132 обратной связи для указания наличия соединения преобразователя 129 с системой 12 управления транспортного средства с возможностью связи. Например, в случае успешного квитирования связи между контроллером 130 и системой 12 управления транспортного средства, индикатор 132 обратной связи может включить лампу для индикации того, что соединение с возможностью связи между преобразователем 129 и системой 12 управления транспортного средства было успешно установлено.
В дополнение к указанным сигналам и командам, в контроллер могут быть введены машиночитаемые данные, представляющие собой команды с возможностью исполнения процессорным устройством контроллера 130 для реализации раскрытых в настоящем описании способов, а также других подразумеваемых, но конкретно не перечисленных вариантов. Пример алгоритма, реализуемого контроллером 130, подробно раскрыт на ФИГ. 5.
Следует понимать, что, несмотря на то, что в раскрытом примере контроллер 130 показан физически установленным в первом пользовательском устройстве 116 ввода, а преобразователь 131 второго пользовательского устройства 118 ввода - соединенным с возможностью связи с контроллером 130, в других вариантах осуществления контроллер 130 может быть физически установлен во втором пользовательском устройстве 118 ввода, а преобразователь 129 первого пользовательского устройства 116 ввода может быть соединен с возможностью связи с контроллером 130.
Контроллер 130 может формировать одну или несколько команд управления силовым агрегатом транспортного средства в соответствии с запросом торможения, полученным через преобразователь 129. В одном примере запросы торможения, полученные от указанных нескольких пользовательских устройств ввода, могут восприниматься как разные и отличные друг от друга входные сигналы, в связи с чем могут быть сформированы разные команды в ответ на указанные разные входные сигналы. Например, в связи с первым запросом торможения, полученным от первого устройства 116 ввода, контроллер 130 может сформировать и передать первую команду управления силовым агрегатом в систему 12 управления транспортного средства, а в связи со вторым запросом торможения, полученным от второго устройства 118 ввода, контроллер 130 может сформировать и передать вторую, другую, команду управления силовым агрегатом в систему 12 управления транспортного средства. В одном примере первый запрос торможения, полученный от первого пользовательского устройства ввода, может предусматривать замедление транспортного средства с первой интенсивностью, а второй запрос торможения, полученный от второго пользовательского устройства ввода, может предусматривать замедление транспортного средства со второй, другой, интенсивностью. Например, если первое пользовательское устройство ввода представляет собой напольную педаль, а второе пользовательское устройство ввода - кнопку на приборной панели, задействование напольной педали пассажиром может восприниматься как первый входной сигнал замедления, преобразуемый в первый набор команд управления силовым агрегатом, замедляющий транспортное средство с первой, более низкой интенсивностью, а задействование кнопки на приборной панели пассажиром может восприниматься как второй входной сигнал замедления, преобразуемый во второй набор команд управления силовым агрегатом, замедляющий транспортное средство со второй, более высокой интенсивностью. В одном примере задействование кнопки пассажиром транспортного средства может быть преобразовано в запрос максимального тормозного момента и минимального момента двигателя для по существу немедленной остановки транспортного средства. Это может быть аналогично событию автоматического торможения в городских условиях (Active city stop), запрошенного водителем транспортного средства посредством единственного входного сигнала через переключатель в системе автоматического торможения в городских условиях (системе электронного управления) транспортного средства. В другом примере, в зависимости от входного сигнала от того или иного пользовательского устройства ввода, могут быть сформированы команды управления силовым агрегатом, обеспечивающие возможность варьировать величину момента таким образом, чтобы предупреждающие действия пассажира транспортного средства были менее навязчивыми (или менее заметными).
Следует понимать, что пользовательские устройства ввода могут быть выполнены в виде устройств двухпозиционного действия, задействование которых обеспечивает максимальный тормозной момент. Или же пользовательские устройства ввода могут быть выполнены в виде устройств с возможностью регулирования, при использовании которых величину прилагаемого тормозного момента (или обеспечиваемую степень замедления) варьируют в зависимости от степени задействования пользовательского устройства ввода. Например, когда пассажир выжимает педаль в пол (то есть полностью выжимает педаль) или задействует аварийную кнопку, может быть обеспечен максимальный тормозной момент и максимальное замедление. Для сравнения, когда педаль нажимают несильно, обеспечиваемые величины тормозного момента и замедления могут быть соответствующими. Это обеспечивает пассажиру возможность усовершенствованного игнорирования.
Следует понимать, что в других вариантах осуществления запросы торможения, полученные от нескольких пользовательских устройств ввода, могут восприниматься как аналогичные входные сигналы, в связи с которыми могут формироваться одни и те же команды. Например, контроллер 130 может формировать один и тот же набор команд управления силовым агрегатом в связи с задействованием пассажиром транспортного средства напольной педаль или кнопки. При этом формируемые команды управления силовым агрегатом могут меняться в зависимости от количества задействованных пользовательских устройств ввода. Например, контроллер 130 может сформировать первый набор команд управления силовым агрегатом, замедляющий транспортное средство с первой, более низкой интенсивностью, при задействовании любого одного из пользовательских устройств ввода, и сформировать второй набор команд управления силовым агрегатом, замедляющий транспортное средство со второй, более высокой интенсивностью, если задействовано несколько пользовательских устройств ввода.
Указанные одно или несколько пользовательских устройств 116, 118 ввода могут не быть механически соединены с компонентами силового агрегата транспортного средства, в том числе тормозной системой 122, системой сцепления и узлом 124 сцепления, и (или) системой 128 акселератора транспортного средства 102. Вместо этого, любое из первого и второго пользовательских устройств 116, 118 ввода вспомогательного блока 103 может быть соединено электронными средствами с системой 12 управления транспортного средства посредством контроллера 130. То есть, будучи установлен, вспомогательный блок 103 соединен электронными средствами с системой 12 управления транспортного средства. Это позволяет воздействовать на системы электронного управления системы 12 управления транспортного средства для обеспечения торможения, когда его запрашивает пассажир. А именно, пассажир транспортного средства может передать запрос момента (например, запрос торможения, создаваемый автоинструктором в связи с предстоящим столкновением) посредством пользовательского устройства ввода вспомогательного блока, что обеспечивает преимущество, состоящее в том, что система управления транспортного средства может регулировать работу блока управления тормозами и блока управления двигателем для создания тормозного момента, игнорируя запрос момента от водителя транспортного средства. Это позволяет автоинструктору прилагать тормозное усилие и предотвращать угрожающее столкновение, если водитель-ученик не нажимает тормозную педаль достаточно быстро. Кроме того, автоинструктор может приложить тормозное усилие и преодолеть управляющее воздействие водителя-ученика через педаль акселератора для предотвращения столкновения.
Например, когда водитель транспортного средства (например, водитель-ученик) запрашивает торможение, нажимая тормозную педаль, система управления транспортного средства может увеличить усилие торможения транспортного средства путем увеличения тормозного момента на колесе и (или) тормозного момента двигателя. Когда пассажир транспортного средства (например, пассажир-инструктор) запрашивает торможение через устройства ввода вспомогательного блока, система управления транспортного средства может увеличить усилие торможения транспортного средства путем увеличения тормозного момента двигателя, например, за счет усиления торможения двигателем. Кроме того, система управления транспортного средства может отрегулировать положение дросселя, подачу топлива (количество, момент и т.п.) и (или) момент зажигания для увеличения выходного тормозного момента двигателя.
В качестве другого примера, по запросу торможения от водителя транспортного средства через тормозную педаль, система управления транспортного средства может сформировать команду создания тормозного момента на колесе. Для сравнения, по запросу торможения от пассажира транспортного средства через вспомогательный блок, система управления транспортного средства может сформировать команду создания тормозного момента двигателя (например, торможения двигателем и (или) рекуперативного торможения).
На ФИГ. 2 раскрыт пример осуществления системы транспортного средства, в котором учебное транспортное средство 202 оснащено вспомогательным блоком 203, содержащим несколько пользовательских устройств ввода. В частности, ФИГ. 2 содержит вид 200 системы транспортного средства изнутри транспортного средства 202. В раскрытом примере указанные несколько пользовательских устройств ввода вспомогательного блока 203 представляют собой первую съемную педаль 216 и вторую съемную кнопку 218. Первая съемная педаль 216 установлена в пассажирской зоне салона 205 транспортного средства, в частности, на полу 204 салона перед пассажирским сиденьем 206. Съемная педаль 216 может представлять собой педаль, не являющуюся тормозной педалью 208 и педалью 210 акселератора транспортного средства, фиксированно установленными в водительской зоне салона транспортного средства, а именно, на полу 204 салона перед водительским сиденьем 212. Водитель-ученик может сидеть на водительском сиденьем 212, а автоинструктор - на пассажирском сиденье 206.
Водитель-ученик может регулировать работу транспортного средства, нажимая педаль 210 акселератора и (или) тормозную педаль 208. В ответ на входной сигнал от водителя через педаль, система управления 220 транспортного средства может изменять тормозной момент и крутящий момент двигателя, создаваемый и передаваемый на колеса транспортного средства. Кроме того, автоинструктор может управлять транспортным средством, задействуя съемную напольную педаль 216 и (или) съемную аварийную кнопку 218.
Съемная напольная педаль 216 показана разъемно соединенной с полом 204 транспортного средства в пассажирской зоне салона транспортного средства с помощью крепежного средства 222, в данном случае изображенном в виде крепежного средства типа «липучка». Однако в других вариантах осуществления крепежное средство для соединения съемной педали вспомогательного блока с полом салона может представлять собой любую из известных технологий фиксации ковровых покрытий на месте (например, тяжелая основа и (или) шипованное крепление типа "ложе факира"). Дополнительно, педаль может быть жестко соединена с болтами направляющей сиденья. Съемная напольная педаль 216 может быть соединена со (специально предназначенным для этого) преобразователем 224, выполненным с возможностью реагирования на запрос торможения, полученный при задействовании напольной педали 216, путем формирования выходного сигнала.
Пассажир транспортного средства может дополнительно или необязательно создавать запрос торможения путем задействования (например, нажатия) съемной кнопки 218 на приборной панели 228 транспортного средства. Как показано на фигуре, приборная панель транспортного средства может содержать прочие разнообразные компоненты транспортного средства, например, дефлекторы 229 обдува, ручки 233 управления, кнопки 234 управления, переключатели (например, переключатель 232), интерактивное табло 235 и т.п. В представленном примере съемная кнопка 218 может быть выполнена как "аварийная кнопка", задействование которой означает запрос немедленного торможения транспортного средства. Съемная кнопка 218 с возможностью приведения в действие пассажиром на пассажирском сиденье 206 может отличаться от кнопки автоматического торможения или переключателя 232, неподвижно закрепленного, на приборной панели 228 с возможностью приведения в действие водителем транспортного средства на водительском сиденье 212 для создания запроса немедленного торможения транспортного средства. Съемная кнопка 218 может быть прикреплена к приборной панели 228 с помощью специально предназначенного для этого крепежного средства, например, крепежного средства типа «липучка», хотя можно использовать крепежные средства и других типов. Съемная кнопка 218 может быть соединена с (специально предназначенным для этого) преобразователем 225, выполненным с возможностью реагирования на запрос торможения, полученный при задействовании кнопки 218, путем формирования выходного сигнала. Или же съемная кнопка 218 может быть соединена с возможностью связи с преобразователем 224, расположенным на напольной педали 216, для формирования в преобразователе 224 выходного сигнала при приведении в действие съемной кнопки 218.
В одном примере автоинструктор, сидящий на пассажирском сиденье 206, может нажимать напольную педаль 216 и (или) кнопку 218 для создания запроса торможения транспортного средства. При нажатии автоинструктором напольной педали 216, преобразователь 224 может получить пассажирский запрос торможения и сформировать выходной сигнал. Аналогичным образом, при задействовании автоинструктором кнопки 218, преобразователь 225 или преобразователь 224 может получить пассажирский запрос торможения и сформировать выходной сигнал. Выходные сигналы преобразователей поступают в контроллер 230 вспомогательного блока 203 (показанный соединенным с напольной педалью 216) и используются для формирования соответствующего набора команд (например, набора команд управления силовым агрегатом). Затем контроллер 230 передает сформированный набор команд на диагностический порт 226 транспортного средства 202, например, по беспроводной связи. В раскрытом примере диагностический порт расположен под водительским сиденьем 212. Диагностический порт 226 может быть соединен с возможностью связи с системой 220 управления транспортного средства с возможностью дальнейшей передачи полученной команды в систему 220 управления транспортного средства. В зависимости от полученных команд, система управления транспортного средства может регулировать работу компонентов силового агрегата для обеспечения необходимого тормозного усилия. Например, при получении входных сигналов замедления от пользовательских устройств ввода вспомогательного блока 203, система управления транспортного средства может изменить тормозной момент и (или) крутящий момент двигателя, прилагаемый к колесам транспортного средства.
В одном примере автоинструктор, сидящий на пассажирском сиденье 206, может нажать напольную педаль 216, чтобы запросить торможение транспортного средства, в то время как водитель-ученик, сидящий на водительском сиденье 212, нажимает педаль 210 акселератора. При получении пассажирского запроса торможения посредством контроллера 230, система 220 управления транспортного средства может проигнорировать запрос водителя на ускорение. А именно, система управления транспортного средства может обеспечить преимущество, состоящее в регулировании работы систем электронного управления транспортного средства таким образом, чтобы они игнорировали запрос ускорения, созданный водителем, а вместо этого задействовали компоненты силового агрегата для выполнения запроса торможения, созданного пассажиром с помощью съемной педали 216. Например, блок управления тормозами системы 220 управления транспортного средства выполнен с возможностью регулирования впрыска топлива, положения дросселя, момента зажигания, переключения ступеней коробки передач и т.п. для повышения тормозного момента, прилагаемого к колесам транспортного средства, с одновременным снижением крутящего момента двигателя. Это позволяет регулировать скорость транспортного средства в соответствии с запросом торможения от пассажира, даже если водитель нажал педаль акселератора. Следует понимать, что в другом примере авто инструктор может нажимать напольную педаль 216 для создания запроса торможения транспортного средства одновременно с нажатием водителем-учеником тормозной педали 208. При этом, при получении пассажирского запроса торможения, система 220 управления транспортного средства может игнорировать водительский запрос торможения. При наличии возможности выборочного игнорирования запросов, созданных водителем через педаль акселератора, сокращается дополнительное тормозное усилие, необходимое для преодоления управляющего воздействия водителя через педаль акселератора, и можно значительно сократить время торможения транспортного средства. Это повышает безопасность транспортного средства и снижает риск столкновений транспортного средства из-за неопытности водителя-ученика.
Обратимся к ФИГ. 3, на которой представлен способ 300, представляющий собой алгоритм для регулирования работы двигателя в учебном транспортном средстве по запросам момента, полученным от водителя транспортного средства (например, водителя-ученика) и (или) пассажира транспортного средства (например, автоинструктора-пассажира). Способ на ФИГ. 3 выполняет система управления транспортного средства (например, система управления 12 на ФИГ. 1), что позволяет замедлять учебное транспортное средство по запросам момента.
На шаге 302 способ включает в себя оценку и (или) опосредованное определение параметров работы транспортного средства и двигателя. В число указанных параметров работы могут, например, входить скорость транспортного средства, частота вращения двигателя, давление воздуха в коллекторе ДВК (MAP), барометрическое давление, температура каталитического нейтрализатора отработавших газов, температура двигателя, положения педалей, условия окружающей среды (например, температура и влажность окружающей среды), степень заряженности аккумуляторной батареи (если транспортное средство является гибридным) и т.п.
На шаге 304 способ включает в себя проверку того, был ли получен запрос момента от водителя транспортного средства. При этом водителем транспортного средства может являться водитель-ученик, обучающийся вождению. В одном примере водитель транспортного средства (или водитель) может создать запрос момента, нажав тормозную педаль и (или) педаль акселератора транспортного средства. Система управления может подтвердить получение водительского запроса момента на основании того, что положение тормозной педали или педали акселератора было изменено на пороговую величину.
Как раскрыто выше, тормозная педаль и педаль акселератора могут быть фиксированно установлены в салоне транспортного средства, в частности, в водительской зоне салона. Кроме того, тормозная педаль в водительской зоне салона может быть соединена (например, механическими и (или) электронными средствами) с тормозной системой транспортного средства. Кроме того, в транспортных средствах, выполненных с системой электронного управления (тормозами), тормозная педаль выполнена с возможностью связи с блоком управления тормозами системы управления транспортного средства. В ответ на управляющее воздействие через тормозную педаль, блок управления тормозами системы управления транспортного средства может изменить тормозной момент на колесе, тормозной момент двигателя, тормозной момент электродвигателя и т.п. для обеспечения необходимого торможения.
После подтверждения запроса момента от водителя транспортного средства, на шаге 306 способ включает в себя формирование первого набора команд в соответствии с запросом момента от водителя транспортного средства. В частности, по запросу момента, полученному через тормозную педаль и (или) педаль акселератора в водительской зоне, система управления может сформировать первый набор команд управления силовым агрегатом. В одном примере, если полученный запрос момента представляет собой (первый) входной сигнал замедления, система управления транспортного средства может сформировать первый набор команд управления силовым агрегатом для создания крутящего момента двигателя и тормозного момента, могущих замедлить транспортное средство.
На следующем шаге 308 способ включает в себя проверку квитирования связи с вспомогательным блоком, съемно установленным в транспортном средстве. То есть, если вспомогательный блок установлен в транспортном средстве, и квитирование связи было подтверждено, вспомогательный блок может быть соединен с возможностью связи с системой управления транспортного средства и соединен электронными средствами с системой силового агрегата транспортного средства (через систему управления транспортного средства). Например, вспомогательный блок может содержать программную логическую схему, например, логику квитирования, для обеспечения возможности связи между преобразователем вспомогательного блока и системой управления транспортного средства. Логика квитирования обеспечивает возможность надлежащего установления связи между вспомогательным блоком и системой управления транспортного средства до того, как данные смогут быть переданы из вспомогательного блока и получены в системе управления транспортного средства. В частности, логика квитирования может в динамическом режиме задавать параметры канала связи, установленного между двумя разнородными объектами (в данном случае - вспомогательным блоком и системой управления транспортного средства) до начала нормальной связи по этому каналу. Так логика квитирования обеспечивает возможность установления соединения между вспомогательным блоком и системой управления транспортного средства до начала передачи данных (в данном случае - передачи пассажирского запроса момента), и, после передачи данных, позволяет завершить соединение.
Если квитирование связи с вспомогательным блоком не подтверждено, на шаге 312 способ включает в себя регулирование работы двигателя в соответствии со сформированным первым набором команд. При этом работу двигателя регулируют таким образом, чтобы выполнить водительский запрос момента. Например, система управления может создавать крутящий момент двигателя и тормозной момент в соответствии с первым набором команд управления силовым агрегатом для замедления транспортного средства с первой, более низкой интенсивностью. То есть, если квитирование связи не подтверждено, транспортное средство по существу работает в режиме обычного или не-учебного транспортного средства, в котором работу двигателя регулируют только в соответствии с командами водителя транспортного средства.
Если квитирование связи с вспомогательным блоком подтверждено, на шаге 310 способ включает в себя проверку того, был ли получен запрос момента от пассажира транспортного средства. При этом пассажиром транспортного средства может быть инструктор, обучающий водителя транспортного средства (в данном случае - водителя-ученика) вождению. То есть, если квитирование связи подтверждено, транспортное средство по существу работает в режиме учебного транспортного средства, в котором работу двигателя регулируют как по командам водителя транспортного средства, так и по командам пассажира транспортного средства, при этом запросы нижестоящего инициатора запроса имеют более высокий приоритет. Полученный запрос момента от пассажира транспортного средства может представлять собой запрос повышения тормозного усилия и (или) снижения мощности двигателя. Например, автоинструктор может запросить повышение тормозного усилия для принятия на себя управления транспортным средством без необходимости совершения соответствующих действий неопытным водителем-учеником.
Пассажир транспортного средства может создать запрос торможения через одно или несколько пользовательских устройств ввода вспомогательного блока, при этом указанные одно или несколько пользовательских устройств ввода съемно установлены в салоне транспортного средства, в частности, в пассажирской зоне салона. Указанные одно или несколько пользовательских устройств ввода могут представлять собой, в качестве неограничивающих примеров, педаль, разъемно соединенную с полом салона в пассажирской зоне, переключатель с возможностью съемной установки на поверхности салона транспортного средства и (или) нажимную кнопку с возможностью съемной установки на поверхности салона транспортного средства, при этом все они расположены в пределах досягаемости руки или стопы пассажира. Пользовательские устройства ввода могу не быть механически или непосредственно соединены с тормозной системой, системой сцепления или системой акселератора транспортного средства. Вместо этого, пользовательские устройства ввода могут быть соединены с различными компонентами силового агрегата транспортного средства опосредованно, то есть через систему управления транспортного средства (например, соединены с диагностическим портом транспортного средства). Это позволяет выполнить запрос момента, полученный от пассажира транспортного средства, используя уже имеющиеся компоненты двигателя без необходимости дополнительных доработок транспортного средства. В частности, пассажирский запрос момента можно выполнять путем создания соответствующего тормозного момента и момента двигателя с помощью уже имеющихся блоков управления силовым агрегатом транспортного средства.
Если запрос момента от пассажира транспортного средства не подтвержден, алгоритм возвращается на шаг 312 для регулирования работы двигателя в соответствии со сформированным первым набором команд, то есть только по водительским запросам момента. Если запрос момента от пассажира транспортного средства подтвержден, то на шаге 314, сразу после подтверждения запроса пассажира транспортного средства, способ включает в себя формирование второго, другого, набора команд в соответствии с запросом пассажира и игнорирование первого набора команд. Затем контроллер может изменить параметры работы двигателя в соответствии с нижестоящим (по иерархии) из двух наборов команд. Например, запрос момента, полученный от пассажира, может представлять собой (второй) входной сигнал замедления, и, соответственно, система управления транспортного средства может сформировать второй, другой, набор команд управления силовым агрегатом, в том числе крутящим моментом двигателя и тормозным моментом, в соответствии со вторым набором команд управления силовым агрегатом для замедления транспортного средства со второй, более высокой интенсивностью. В качестве другого примера, по запросу момента от пассажира транспортного средства, тормозной момент двигателя можно повысить путем усиления торможения двигателем.
Следует понимать, что, несмотря на то, что раскрытый способ иллюстрирует получение второго указанного входного сигнала замедления от пассажира транспортного средства вместе с указанным первым входным сигналом замедления от водителя транспортного средства и игнорирование первого набора команд в связи с получением указанного второго входного сигнала замедления от пассажира транспортного средства, в других вариантах осуществления второй входной сигнал замедления может быть получен отдельно от первого входного сигнала замедления. Таким образом, если будет подтверждено квитирование связи с вспомогательным блоком, система управления транспортного средства может принимать запросы момента от пассажира транспортного средства даже при отсутствии запросов момента от водителя транспортного средства. В подобных условиях система управления транспортного средства может сформировать второй набор команд по запросу момента от пассажира транспортного средства и соответствующим образом изменить крутящий момент двигателя и тормозной момент.
В еще одном варианте второй входной сигнал замедления от пассажира может быть получен одновременно с первым входным сигналом ускорения от водителя транспортного средства. То есть пассажир может нажать съемную напольную педаль, когда водитель жмет педаль акселератора. В подобных условиях система управления транспортного средства может сформировать второй набор команд в соответствии с запросом момента от пассажира транспортного средства, проигнорировав водительский входной сигнал ускорения.
В вариантах, где и водитель, и пассажир создают входные сигналы замедления, первый и второй наборы команд, формируемые в соответствии с водительским или пассажирским запросом момента, могут содержать одну или несколько из следующих команд: повышения тормозного момента на колесе, повышения тормозного момента двигателя и снижения крутящего момента двигателя. Однако сформированный первый набор команд изменения момента может предусматривать замедление транспортного средства с первой, более низкой интенсивностью, а сформированный второй набор команд изменения момента может предусматривать замедление транспортного средства со второй, более высокой интенсивностью. Более быстрое замедление транспортного средства по запросу тормозного момента от пассажира транспортного средства, с одновременным игнорированием водительского запроса тормозного момента, позволяет автоинструктору быстро замедлить транспортное средство, когда водитель-ученик не может своевременно затормозить транспортное средство.
В вариантах, где водитель создает входной сигнал ускорения, а пассажир - входной сигнал замедления, первый набор команд может содержать одну или несколько из следующих команд: снижения тормозного момента на колесе, снижения тормозного момента двигателя и повышения крутящего момента двигателя, а второй набор команд может содержать одну или несколько из следующих команд: повышения тормозного момента на колесе, повышения тормозного момента двигателя и (или) снижения крутящего момента двигателя. При этом сформированный первый набор команд изменения момента может предусматривать ускорение транспортного средства, а сформированный второй набор команд изменения момента может предусматривать замедление транспортного средства. При наличии возможности выборочного игнорирования запросов, созданных водителем через педаль акселератора, запросом торможения, созданным пассажиром, сокращается дополнительное тормозное усилие, необходимое для преодоления управляющего воздействия водителя через педаль акселератора. Это сокращает время торможения транспортного средства и риск столкновения транспортного средства из-за недостатка у водителя-ученика опыта вождения.
Обратимся к ФИГ. 4, на которой представлен способ 400 для формирования одной или нескольких команд управления силовым агрегатом по запросу момента от пассажира транспортного средства и передачи сформированных команд из интерфейсной системы транспортного средства, например, вспомогательного блока, съемно установленного в учебном транспортном средстве (например, вспомогательного блока 103 на ФИГ. 1), в систему управления транспортного средства. Способ на ФИГ. 4, выполняемый вспомогательным блоком, позволяет замедлять транспортное средство по пассажирскому запросу момента.
На шаге 402 способ включает в себя получение пассажирского запроса момента. Пассажирский запрос момента поступает при задействовании пользовательского устройства ввода вспомогательного блока. В одном примере пассажир является автоинструктором, а полученный пассажирский запрос момента - запросом торможения транспортного средства. Запрос торможения может представлять собой запрос замедления транспортного средства до необходимой скорости транспортного средства или по существу незамедлительной остановки транспортного средства (например, для предотвращения грозящего столкновения транспортного средства). Как раскрыто выше, вспомогательный блок может содержать одно или несколько пользовательских устройств ввода для получения запроса торможения от пассажира транспортного средства, а при задействовании любого из нескольких пользовательских устройств ввода может быть передан пассажирский запрос момента. Например, пассажир транспортного средства может создать запрос торможения, задействовав педаль, разъемно соединенную с полом транспортного средства с помощью крепежного средства. В качестве другого примера, пассажир транспортного средства может нажать кнопку (например, аварийную кнопку), съемно установленную на стене или приборной панели транспортного средства с помощью крепежного средства, для создания запроса момента. В еще одном примере пассажир транспортного средства может изменить положение переключателя (например, аварийного переключателя), съемно установленного на стенке транспортного средства с помощью крепежного средства, для создания запроса момента. Следует понимать, что можно задействовать и другие пользовательские устройства ввода. В дополнительных примерах пассажир может задействовать несколько пользовательских устройств ввода одновременно. Например, пассажир может задействовать педаль, одновременно нажав аварийную кнопку.
Вспомогательный блок может содержать преобразователь, соединенный с пользовательским устройством (устройствами) ввода, формирующий выходной сигнал на основе запроса торможения, созданным пассажиром транспортного средства, путем задействования пользовательского устройства (устройств) ввода. В одном примере вспомогательный блок может содержать единственный преобразователь, выполненный с возможностью приема запросов торможения от любого из пользовательских устройств ввода. В других примерах любое пользовательское устройство ввода может иметь специально предназначенный преобразователь для получения запроса торможения от соответствующего пользовательского устройства ввода. Соответственно, на шаге 402, преобразователь (преобразователи) может (могут) принимать входной сигнал, означающий запрос торможения от пассажира транспортного средства, при этом запрос торможения создан путем задействования какого-либо пользовательского устройства ввода пассажиром транспортного средства.
На шаге 404 способ включает в себя формирование выходного сигнала на основе полученного запроса торможения. А именно, преобразователь может сформировать выходной сигнал на основе запроса торможения от пассажира транспортного средства. Выходной сигнал преобразователя может быть принят вспомогательным блоком контроллера с возможностью использования для формирования и передачи команды управления силовым агрегатом, как раскрыто ниже.
На шаге 406 можно проверить квитирование связи с системой управления транспортного средства. Как было раскрыто выше, контроллер вспомогательного блока может содержать логику квитирования (то есть программную логическую схему) для установления связи между преобразователем и системой управления транспортного средства до начала передачи данных из вспомогательного блока и их получения в системе управления транспортного средства. В частности, указанная логика обеспечивает возможность установления безопасного и надежного соединения с возможностью связи между вспомогательным блоком и системой управления транспортного средства до передачи пассажирского запроса момента и относящихся к нему данных из вспомогательного блока. В некоторых вариантах осуществления вспомогательный блок может содержать индикатор обратной связи для индикации наличия соединения с возможностью связи между преобразователем и системой управления транспортного средства в случае успешного квитирования связи между контроллером и системой управления транспортного средства. Например, если успешное квитирование связи будет подтверждено, может загореться лампа индикатора обратной связи, указывая на то, что связь между вспомогательным блоком и транспортным средством была установлена, и осуществляется / может осуществляться передача данных между компонентами. Если квитирование связи не будет подтверждено, выполнение алгоритма можно завершить, при этом передача информации пассажирского запроса торможения из вспомогательного блока в систему управления транспортного средства невозможна.
На шаге 408, после проверки квитирования, способ включает в себя формирование одной или нескольких команд управления силовым агрегатом на основе запроса торможения. А именно, контроллер вспомогательного блока может принять выходной сигнал преобразователя и сформировать одну или несколько команд управления силовым агрегатом в соответствии с выходным сигналом преобразователя. Указанные одна или несколько команд управления силовым агрегатом могут представлять собой команды для изменения крутящего момента двигателя и тормозного момента, позволяющего замедлить транспортное средство по пассажирскому запросу торможения.
На шаге 410 контроллер может передать указанные одну или несколько команд управления силовым агрегатом транспортного средства (сформированные на шаге 408) в систему управления транспортного средства. В одном примере контроллер вспомогательного блока может быть соединен с возможностью связи с системой управления транспортного средства по беспроводной связи, при этом указанные одну или несколько команд управления силовым агрегатом транспортного средства можно передавать по указанной беспроводной связи.
В одном примере вспомогательный блок может содержать первое и второе пользовательские устройства ввода. Первое пользовательское устройство ввода может представлять собой педаль, разъемно соединенную с полом салона транспортного средства в пассажирской зоне, а второе пользовательское устройство ввода - кнопку (например, нажимную кнопку), съемно установленную на приборной панели салона транспортного средства в пассажирской зоне (как показано в примере осуществления на ФИГ. 2). При этом, при получении первого запроса торможения от первого устройства ввода, контроллер может сформировать и передать первую команду управления силовым агрегатом в систему управления транспортного средства. Для сравнения, при получении второго запроса торможения от второго устройства ввода, контроллер может сформировать и передать вторую, другую, команду управления силовым агрегатом в систему управления транспортного средства. Первая команда управления силовым агрегатом, сформированная в связи с задействованием первого пользовательского устройства ввода, может предусматривать замедление транспортного средства с первой, более низкой интенсивностью, а вторая команда управления силовым агрегатом, сформированная в связи с задействованием второго пользовательского устройства ввода, может предусматривать замедление транспортного средства со второй, более высокой интенсивностью. То есть, если пассажир транспортного средства задействует либо напольную педаль, либо кнопку, будет запрошено торможение транспортного средства, однако задействование кнопки означает запрос более быстрого замедления транспортного средства, чем при задействовании педали, в связи с чем может быть сформирована команда управления силовым агрегатом, предусматривающая больший тормозной момент. Например, задействование кнопки (например, аварийной кнопки) может означать запрос максимального тормозного момента и минимального момента двигателя для по существу немедленной остановки транспортного средства.
В другом примере первая команда управления силовым агрегатом может быть сформирована в связи с задействованием любого из указанных нескольких пользовательских устройств ввода для замедления транспортного средства с первой, более низкой интенсивностью, а вторая, другая, команда управления силовым агрегатом может быть сформирована в связи с задействованием нескольких (например, двух и более) пользовательских устройств ввода для замедления транспортного средства со второй, более высокой интенсивностью. То есть, если пассажир транспортного средства задействует либо напольную педаль, либо кнопку, он запрашивает торможение транспортного средства, однако задействование и педали, и кнопки означает запрос более быстрого замедления транспортного средства, чем при задействовании либо педали, либо кнопки. Соответственно, когда задействованы педаль и кнопка, может быть сформирована команда управления силовым агрегатом, предусматривающая больший тормозной момент.
Таким образом, запрос торможения, созданный пассажиром транспортного средства, может быть передан в систему управления учебного транспортного средства для ускорения замедления транспортного средства. Это позволяет автоинструктору принять на себя управление транспортным средством без необходимости соответствующего реагирования со стороны неопытного водителя-ученика. Аналогичным образом, автоинструктор может принять на себя управление транспортным средством, даже при отсутствии соответствующего реагирования со стороны неопытного водителя-ученика. Например, автоинструктор может замедлить транспортное средство с целью регулирования его скорости, если водитель-ученик (ошибочно) нажал педаль акселератора, или если водитель-ученик не может своевременно нажать тормозную педаль транспортного средства, чтобы избежать столкновения.
В одном примере предложена система транспортного средства, содержащая транспортное средство и вспомогательный блок. Транспортное средство содержит первую напольную педаль, фиксированно установленную в салоне в водительской зоне, а вспомогательный блок содержит вторую напольную педаль, съемно установленную в салоне в пассажирской зоне. Система транспортного средства дополнительно содержит систему управления, выполненную с машиночитаемыми командами, обеспечивающими возможность регулирования выходного крутящего момента двигателя и выходного тормозного момента в зависимости от того, какие операции производят с первой и второй педалями. Система управления может принимать первый входной сигнал замедления от водителя транспортного средства через первую педаль и регулировать выходной крутящий момент двигателя и выходной тормозной момент в ответ на первый входной сигнал замедления для замедления транспортного средства.
Система управления может принимать второй входной сигнал замедления от пассажира транспортного средства через вторую педаль. Вспомогательный блок может содержать преобразователь, соединенный с возможностью связи со второй педалью, при этом вспомогательный блок также соединен с возможностью связи с системой управления транспортного средства через преобразователь. Например, система управления транспортного средства может принимать команду торможения, переданную преобразователем, при этом преобразователь формирует команду торможения в зависимости от второго входного сигнала замедления второй педали. Второй входной сигнал замедления от пассажира транспортного средства может быть получен вместе с первым входным сигналом замедления или отдельно от него. Получив указанные сигналы, система управления может отрегулировать выходной крутящий момент двигателя и выходной тормозной момент в соответствии со вторым входным сигналом замедления с одновременным игнорированием первого входного сигнала замедления (если первый входной сигнал замедления был получен). Выходной крутящий момент двигателя и выходной тормозной момент, созданные в соответствии со вторым входным сигналом замедления, обеспечивают возможность более быстрого замедления транспортного средства, чем выходной крутящий момент двигателя и выходной тормозной момент в соответствии с первым входным сигналом замедления.
В еще одном примере транспортное средство может дополнительно содержать диагностический порт внутри салона транспортного средства, а вспомогательный блок может дополнительно содержать пользовательскую кнопку ввода с возможностью съемной установки на диагностический порт. При этом пользовательская кнопка ввода (или другое пользовательское устройство ввода) может быть соединена электронными средствами с тормозной системой транспортного средства через систему управления. Система управления может принимать третий входной сигнал замедления от пассажира транспортного средства через пользовательскую кнопку ввода. Третий входной сигнал замедления может поступить вместе со вторым входным сигналом замедления или вместо него. В этом случае оператор мог задействовать и (вторую) педаль, и кнопку, или только кнопку. Соответственно, система управления транспортного средства может отрегулировать выходной крутящий момент двигателя и выходной тормозной момент в соответствии с третьим (или вторым и третьим) входным сигналом замедления с одновременным игнорированием первого входного сигнал замедления. При этом выходной крутящий момент двигателя и выходной тормозной момент в соответствии с третьим входным сигналом замедления замедляют транспортное средство быстрее, чем выходной крутящий момент двигателя и выходной тормозной момент в соответствии с первым и вторым входными сигналами замедления. Таким образом, путем игнорирования запроса водителя через тормозную педаль, пассажир может быстро осуществлять управление транспортным средством и предотвращать грозящее столкновение транспортного средства.
В еще одном примере система управления может принять первый входной сигнал ускорения от водителя транспортного средства через первую педаль и регулировать выходной крутящий момент двигателя и выходной тормозной момент в соответствии с первым входным сигналом ускорения для ускорения транспортного средства. Система управления может принять второй входной сигнал замедления от пассажира транспортного средства через вторую педаль. Второй входной сигнал замедления от пассажира транспортного средства может быть принят наряду с первым входным сигналом ускорения. При получении указанных сигналов, система управления может отрегулировать выходной крутящий момент двигателя и выходной тормозной момент в соответствии со вторым входным сигналом замедления с одновременным игнорированием первого входного сигнала ускорения. Выходной крутящий момент двигателя и выходной тормозной момент, создаваемые в соответствии со вторым входным сигналом замедления, могут замедлять транспортное средство. Благодаря игнорированию управляющего воздействия водителя через педаль акселератора, можно сократить тормозное усилие, необходимое для преодоления входного сигнала ускорения от водителя с возможностью быстрой остановки транспортного средства пассажиром для предотвращения грозящего столкновения.
Обратимся к ФИГ. 5, содержащей схему 500, иллюстрирующую пример применения тормозного момента в учебном транспортном средстве по запросу торможения, полученному либо от водителя транспортного средства (например, водителя-ученика), либо от пассажира транспортного средства (например, инструктора-пассажира). Схема 500 иллюстрирует задействование тормозной педали транспортного средства водителем транспортного средства на кривой 502. Задействование пользовательского устройства ввода вспомогательного блока пассажиром транспортного средства представлено на кривой 504. Создаваемые тормозные моменты, прилагаемые системой управления транспортного средства к транспортному средству, представлены на кривой 506. Соответствующие изменения скорости транспортного средства представлены на кривой 508. Все изменения показаны происходящими по времени (по оси х).
До t1 транспортное средство может работать при отсутствии запросов торможения от водителя транспортного средства и пассажира транспортного средства. В момент t1 поступает первый входной сигнал замедления от водителя через первую напольную педаль (например, тормозную педаль), фиксированно установленную в водительской зоне салона транспортного средства (кривая 502). Первая педаль может быть механически соединена с тормозной системой транспортного средства. В соответствии с первым входным сигналом замедления от водителя, поступившим через первую напольную педаль, система управления транспортного средства может отрегулировать выходной крутящий момент двигателя и выходной тормозной момент (кривая 506) для замедления транспортного средства (кривая 508) с первой интенсивностью (как следует из наклона кривой 508 между t1 и t2). В момент t2 водитель транспортного средства может отпустить первую напольную педаль, и скорость транспортного средства может вновь начать расти.
В момент t3 поступает первый пассажирский входной сигнал замедления от пассажира транспортного средства через вторую напольную педаль (например, тормозную педаль) вспомогательного блока, установленную в транспортном средстве (кривая 504). Вторая напольная педаль может быть съемно установлена в пассажирской зоне салона транспортного средства и может быть соединена электронными средствами с тормозной системой транспортного средства через систему управления транспортного средства. В соответствии с первым пассажирским входным сигналом замедления, поступившим через вторую напольную педаль, система управления транспортного средства может отрегулировать выходной крутящий момент двигателя и выходной тормозной момент (кривая 506) для замедления транспортного средства (кривая 508) со второй интенсивностью (как следует из наклона кривой 508 между t3 и t4). В момент t4 пассажир транспортного средства может отпустить вторую напольную педаль, и скорость транспортного средства может вновь начать расти. Как можно увидеть из сравнения кривых 506 и 508 в моменты t1-t2 с кривыми в моменты t3-t4, выходной крутящий момент двигателя и выходной тормозной момент, создаваемые в соответствии с первым пассажирским входным сигналом замедления, больше и замедляют транспортное средство быстрее, чем выходной крутящий момент двигателя и выходной тормозной момент, создаваемые в соответствии с первым входным сигналом замедления от водителя.
В момент t5 поступает второй входной сигнал замедления от водителя транспортного средства через первую напольную педаль (кривая 502). В связи с этим, система управления транспортного средства изменяет выходной тормозной момент (кривая 506) в соответствии со вторым входным сигналом замедления от водителя для замедления транспортного средства (кривая 508). В то время, когда управление транспортным средством осуществляется в соответствии со вторым входным сигналом замедления от водителя, в момент t6 поступает второй пассажирский входной сигнал замедления. В связи с этим, в момент t6 система управления транспортного средства может проигнорировать второй входной сигнал замедления от водителя и отрегулировать выходной тормозной момент (кривая 506) в соответствии со вторым пассажирским входным сигналом замедления для замедления транспортного средства (кривая 508) с большей интенсивностью. В частности, как можно увидеть из сравнения кривых 506 и 508 в моменты t5-t6 с кривыми в моменты t6-t7, прилагаемый тормозной момент можно повысить в соответствии со вторым пассажирским входным сигналом замедления для более быстрого замедления транспортного средства и его остановки значительно раньше, чем это было бы возможно в соответствии со вторым входным сигналом замедления от водителя.
Следует понимать, что вышеприведенный пример, описывающий пассажирское устройство ввода как устройство двухпозиционного действия, не имеет ограничивающего характера. В других вариантах осуществления пассажир может варьировать величину тормозного момента, запрашиваемого через педаль, при этом результатом полного вжатия или нажатия педали в пол или задействования аварийной кнопки / управляющего воздействия через переключатель станет максимальное замедление.
Так можно обеспечить преимущество, состоящее в возможности регулирования работы уже имеющихся систем электронного управления транспортного средства для торможения или ускорения транспортного средства в соответствии с запросом момента от пассажира транспортного средства в учебном транспортном средстве. При использовании переносного вспомогательного блока, соединенного с возможностью связи с блоками управления двигателем и тормозами транспортного средства, любое транспортное средство можно использовать в качестве учебного без необходимости существенных и дорогостоящих доработок транспортного средства. Обеспечив возможность игнорирования управляющего воздействия водителя-ученика через педаль акселератора, а также управляющего воздействия через тормозную педаль, запросом тормозного момента от инструктора-пассажира, можно сократить время торможения транспортного средства и повысить его безопасность. В целом, можно улучшить показатели безопасности, стоимости и компактности автомобильного транспортного средства.
Среднему специалисту в данной области техники будет понятно, что раскрытые в настоящем описании алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия и (или) функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Несмотря на отсутствие явных примеров, среднему специалисту в данной области техники будет ясно, что одно или несколько из проиллюстрированных действий или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии.
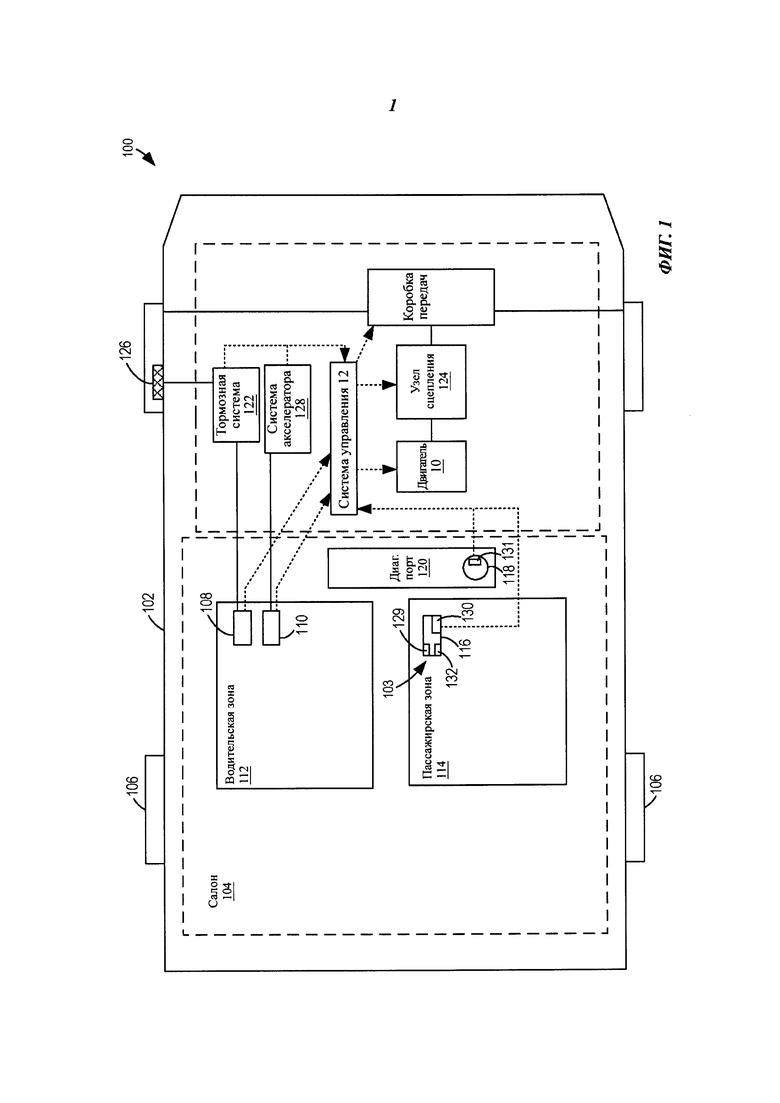

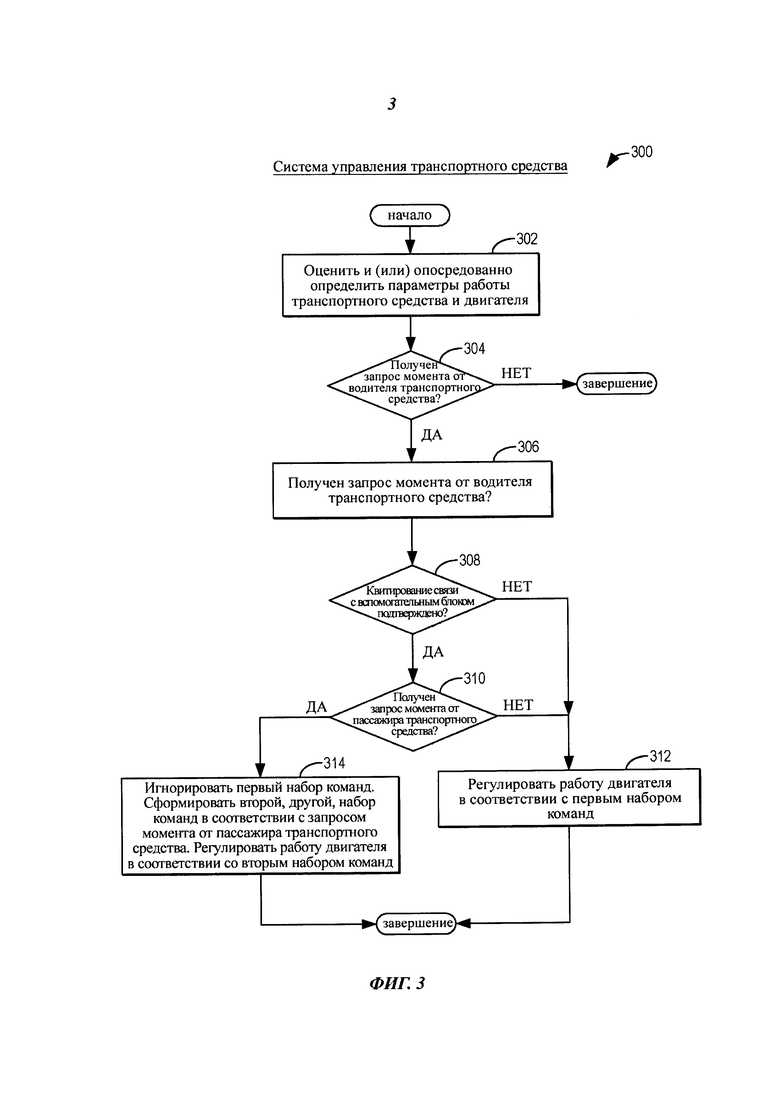

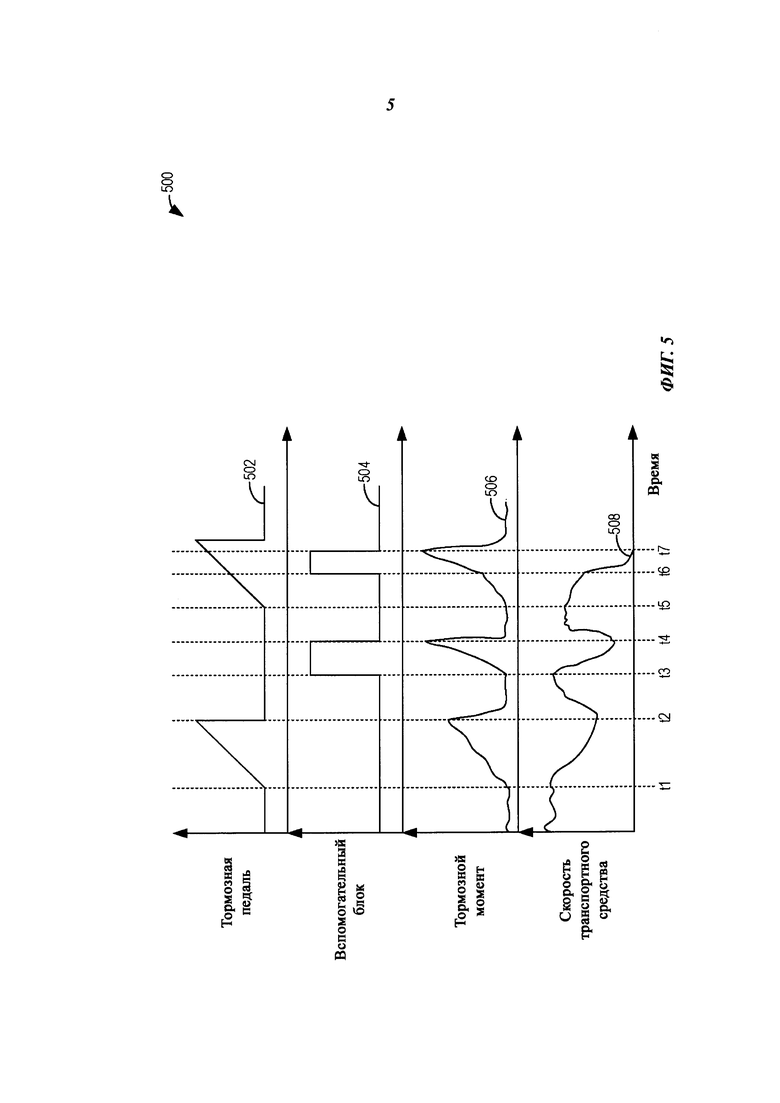
Интерфейсная система транспортного средства содержит пользовательское устройство ввода, преобразователь, соединенный с пользовательским устройством ввода, для формирования выходного сигнала на основе запроса торможения, контроллер с программной логической схемой. Контроллер выполнен с возможностью приема выходного сигнала преобразователя, формирования команды тормозного момента двигателя и выходного тормозного момента на колесе в соответствии с запросом торможения. Контроллер также выполнен с возможностью передачи указанной команды в систему управления транспортного средства через диагностический порт транспортного средства, при этом порт также выполнен с возможностью передачи диагностических кодов, относящихся к сбоям в работе транспортного средства. Предложены также система учебного транспортного средства, интерфейсная система содействия водителю. Достигается повышение безопасности учебного транспортного средства, улучшенное содействие обучению водителя, уменьшение механической сложности, повышение портативности. 3 н. и 14 з.п. ф-лы, 5 ил.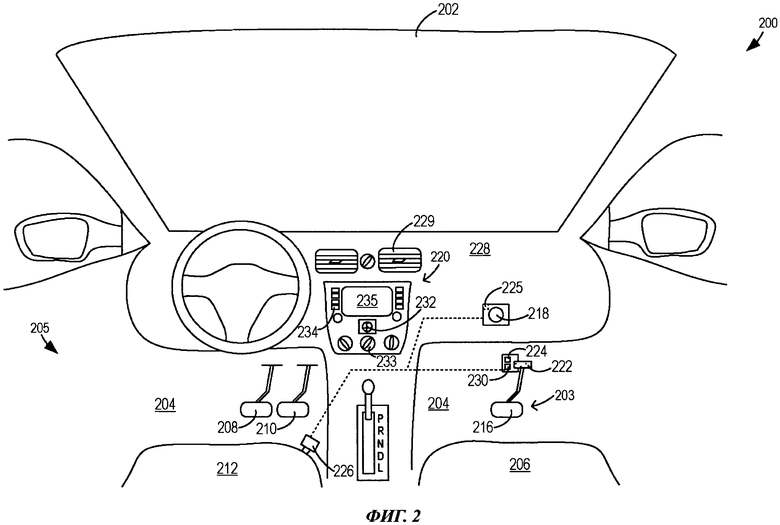
1. Интерфейсная система транспортного средства, содержащая:
пользовательское устройство ввода для приема пассажирского запроса торможения, при этом пользовательское устройство ввода не является тормозной педалью, фиксированно установленной в салоне транспортного средства;
преобразователь, соединенный с пользовательским устройством ввода, для формирования выходного сигнала на основе запроса торможения; и
контроллер с программной логической схемой для:
приема выходного сигнала преобразователя;
формирования команды тормозного момента двигателя и выходного тормозного момента на колесе в соответствии с запросом торможения; и
передачи указанной команды в систему управления транспортного средства через диагностический порт транспортного средства, при этом порт также выполнен с возможностью передачи диагностических кодов, относящихся к сбоям в работе транспортного средства.
2. Интерфейсная система по п. 1, отличающаяся тем, что программная логическая схема содержит логику квитирования для связи между преобразователем и системой управления транспортного средства, причем заданные командой тормозной момент двигателя и выходной тормозной момент на колесе обеспечивают возможность замедления транспортного средства посредством системы управления транспортного средства в соответствии с пассажирским запросом торможения.
3. Интерфейсная система по п. 2, дополнительно содержащая индикатор обратной связи для индикации наличия соединения с возможностью связи между преобразователем и системой управления транспортного средства в случае успешного квитирования связи между контроллером и системой управления транспортного средства.
4. Интерфейсная система по п. 1, дополнительно содержащая крепежное средство, причем пользовательское устройство ввода содержит педаль, выполненную с возможностью разъемного соединения с полом транспортного средства с помощью указанного крепежного средства, причем пользовательское устройство ввода, будучи установлено, не соединено механически с тормозной системой, системой сцепления и (или) системой акселератора транспортного средства, причем интерфейсная система, будучи установлена, соединена электронными средствами с системой силового агрегата транспортного средства.
5. Интерфейсная система по п. 1, дополнительно содержащая крепежное средство, причем пользовательское устройство ввода содержит нажимную кнопку или переключатель, выполненные с возможностью съемного соединения с поверхностью в салоне транспортного средства в пределах досягаемости пассажира с помощью указанного крепежного средства, причем пользовательское устройство ввода не соединено механически с тормозной системой, системой сцепления и (или) системой акселератора транспортного средства.
6. Интерфейсная система по п. 1, отличающаяся тем, что пользовательское устройство ввода представляет собой первое пользовательское устройство ввода, причем интерфейсная система дополнительно содержит второе пользовательское устройство ввода, при этом и первое, и второе пользовательские устройства ввода соединены электронными средствами с системой управления транспортного средства через контроллер.
7. Интерфейсная система по п. 6, отличающаяся тем, что первое или второе пользовательское устройство ввода содержит либо педаль, выполненную с возможностью разъемного соединения с полом салона транспортного средства, либо нажимную кнопку или переключатель, выполненный с возможностью съемной установки на поверхности салона транспортного средства в пределах досягаемости пассажира.
8. Интерфейсная система по п. 7, отличающаяся тем, что контроллер, формирующий команду тормозного момента двигателя и выходного тормозного момента на колесе в соответствии с запросом торможения, выполнен с возможностью:
при получении первого запроса торможения от первого пользовательского устройства ввода, формирования и передачи первой команды тормозного момента на колесе в систему управления транспортного средства; и
при получении второго запроса торможения от второго пользовательского устройства ввода, формирования и передачи второй команды тормозного момента двигателя в систему управления транспортного средства.
9. Система учебного транспортного средства, содержащая:
салон транспортного средства;
тормозную систему, содержащую колесные тормоза для торможения колес транспортного средства;
тормозную педаль для получения запроса торможения от водителя транспортного средства, при этом тормозная педаль механически соединена с тормозной системой;
диагностический порт внутри салона транспортного средства, при этом диагностический порт выполнен с возможностью приема запроса торможения от пассажира транспортного средства через вспомогательный блок, выполненный с возможностью разъемного соединения с диагностическим портом, при этом вспомогательный блок не соединен механически с тормозной системой; и
систему управления с машиночитаемыми командами для:
формирования первого набора команд по запросу торможения от водителя транспортного средства и увеличения тормозного момента на колесе в соответствии с первым набором команд; и
при получении запроса торможения от пассажира транспортного средства через диагностический порт,
формирования второго, другого, набора команд в соответствии с пассажирским запросом торможения;
игнорирования первого набора команд; и
регулирования работы двигателя, в том числе уменьшения крутящего момента двигателя и увеличения тормозного момента двигателя в соответствии со вторым набором команд.
10. Система транспортного средства по п. 9, отличающаяся тем, что первый набор команд выполнен с возможностью замедления транспортного средства с первой, более низкой интенсивностью, причем второй набор команд выполнен с возможностью замедления транспортного средства со второй, более высокой интенсивностью.
11. Система транспортного средства по п. 9, отличающаяся тем, что первый и второй наборы команд дополнительно включают в себя команду увеличения тормозного момента двигателя.
12. Система транспортного средства по п. 9, отличающаяся тем, что транспортное средство представляет собой учебное транспортное средство.
13. Система транспортного средства по п. 9, отличающаяся тем, что тормозная педаль фиксированно установлена в водительской зоне салона, причем диагностический порт выполнен с возможностью приема запроса торможения от пассажира транспортного средства через переносную педаль вспомогательного блока, при этом указанная переносная педаль выполнена с возможностью съемной установки в пассажирской зоне салона.
14. Система транспортного средства по п. 13, дополнительно содержащая педаль акселератора, фиксированно установленную в водительской зоне салона, причем тормозная педаль и педаль акселератора механически соединены с системой силового агрегата транспортного средства, причем вспомогательный блок, будучи установлен, соединен электронными средствами с системой силового агрегата транспортного средства через диагностический порт.
15. Интерфейсная система содействия водителю, содержащая:
транспортное средство, содержащее первую напольную педаль, фиксированно установленную в салоне в водительской зоне, при этом первая напольная педаль механически соединена с тормозной системой;
вспомогательный блок, содержащий вторую напольную педаль, съемно установленную в салоне в пассажирской зоне, при этом вторая напольная педаль соединена электронными средствами с тормозной системой и системой силового агрегата транспортного средства; и
систему управления с машиночитаемыми командами для:
приема первого входного сигнала ускорения от водителя транспортного средства через первую педаль с одновременным приемом второго входного сигнала замедления от пассажира транспортного средства через вторую педаль; и
изменения выходного крутящего момента двигателя и выходного тормозного момента в соответствии со вторым входным сигналом замедления с одновременным игнорированием первого входного сигнала ускорения для замедления транспортного средства, при этом указанный выходной тормозной момент включает в себя тормозной момент на колесе и тормозной момент двигателя.
16. Система по п. 15, отличающаяся тем, что вспомогательный блок дополнительно содержит преобразователь, соединенный с возможностью связи со второй педалью, при этом вспомогательный блок соединен с возможностью связи с системой управления через преобразователь, причем система управления, принимающая второй входной сигнал замедления от пассажира транспортного средства через вторую педаль, представляет собой систему управления, принимающую команду торможения, переданную преобразователем, при этом команда торможения, формируемая преобразователем, основана на втором входном сигнале замедления второй педали.
17. Система по п. 16, отличающаяся тем, что транспортное средство дополнительно содержит диагностический порт внутри салона транспортного средства, причем вспомогательный блок дополнительно содержит пользовательское устройство ввода, выполненное с возможностью съемной установки на диагностическом порте, при этом пользовательское устройство ввода соединено электронными средствами с тормозной системой транспортного средства через систему управления, причем система управления содержит дополнительные команды для:
приема третьего входного сигнала замедления от пассажира транспортного средства через пользовательское устройство ввода; и
регулирования выходного крутящего момента двигателя и выходного тормозного момента в соответствии с третьим входным сигналом замедления с одновременным игнорированием первого входного сигнала ускорения, причем выходной крутящий момент двигателя и выходной тормозной момент в соответствии с третьим входным сигналом замедления выполнены с возможностью замедления транспортного средства быстрее, чем выходной крутящий момент двигателя и выходной тормозной момент в соответствии со вторым входным сигналом замедления.
| Двухсторонний зуб для ручных грабель | 1927 |
|
SU8942A1 |
| US 20120283894 A1, 08.11.2012 | |||
| US 20120245765 A1, 27.09.2012. | |||

