Изобретение относится к авиационной технике, а именно к ручным управляющим устройствам для приведения в действие поверхностей управления летательного аппарата, и может быть применено при установке его между приборной доской и креслом пилота для экипажа, состоящего из одного человека.
Известные посты ручного управления в составе штурвала и штурвального вала, который проходит через переднюю панель приборов, обладают ограниченными функциональными возможностями, так как с их помощью можно управлять только двумя управляющими поверхностями, а именно рулем высоты, удаляя штурвал от себя или на себя, изменяется угол тангажа самолета, и элеронами, поворачивая штурвал относительно продольной оси штурвального вала. Это так называемый комплекс ручного управления. Для управления по углу рысканья применяется комплекс ножного управления, а именно педали. Патенты SU 999406 A1, SU 1376432 А1, RU 2356793 C1, RU 2420427 С2, US 2009321584 A1, US 2014014781 Α1.
Задачей изобретения является разработка трехкоординатного поста управления самолетом, который обеспечивает снижение веса конструкции системы управления в кабине экипажа за счет отказа от ножного управления. Отказ от ножного управления снимает медицинские ограничения к летному составу по состоянию ног. Пилот с дефектами ног с трехкоординатным штурвалом управления способен полноценно управлять любым летательным аппаратом, либо напрямую на поверхности управления, либо через усилители известных конструкций. Также трехкоординатный пост существенно расширяет ограничения по минимальному росту пилота, так как не требуется согласование положения кресла по высоте и по расстоянию до педалей, ввиду отсутствия педалей.
Решение поставленной задачи достигается тем, что в конструкции штурвала добавляется еще одна степень свободы, а именно штурвальная колонка совместно со штурвалом, которая через шлицевой штурвальный вал, установленный подвижно в направляющей трубе, проходящей через вырез в панели приборов, сохраняет возможность вращения относительно собственной продольной горизонтальной оси, а сам штурвал имеет возможность отдельно поворачиваться относительно оси, перпендикулярной продольной оси вала.
Причем, поворот штурвала совместно со штурвальным валом относительно продольной оси вала в вертикальной плоскости управляет положением элеронов, разворот штурвала относительно поперечной вертикальной оси между штурвалом и штурвальным валом управляет положением руля направления, линейные перемещения штурвала, совместно со штурвальным валом (′′на себя - от себя′′) управляет положением руля высоты, так как преобразуются с помощью шлицевой тяги в угловые перемещения качалки. Для практического исключения взаимного влияния перемещения штурвала относительно продольной оси на положение рулей направления ось вращения качалки привода руля направления соединяется с телескопическим валом в верхней точке с помощью оси, лежащей в плоскости оси вращения штурвального вала.
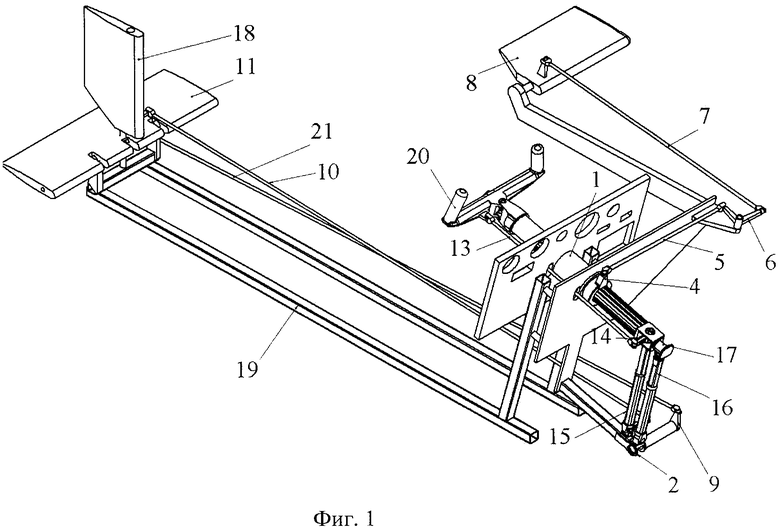
На фиг. 1 показан общий вид трехкоординатного поста управления самолетом в составе стенда-демонстратора, все рулевые поверхности в нейтральном положении.
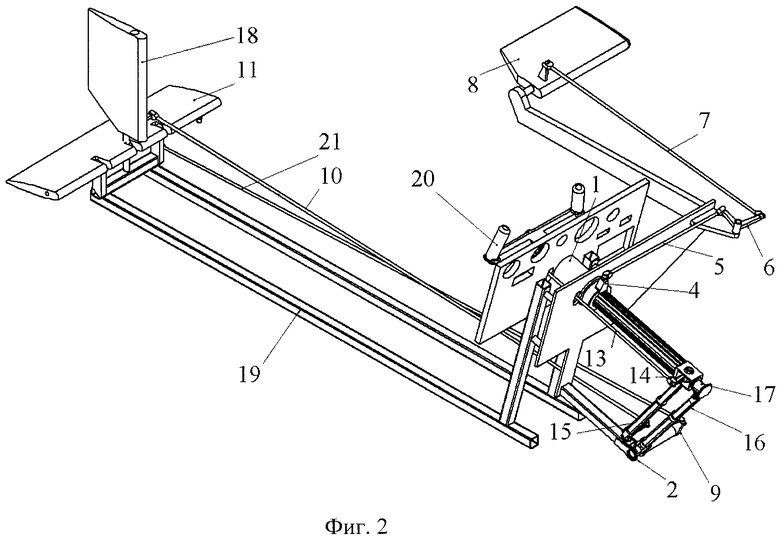
На фиг. 2 показано предельно переднее перемещение штурвала на тангаж (положение ′′от себя′′).
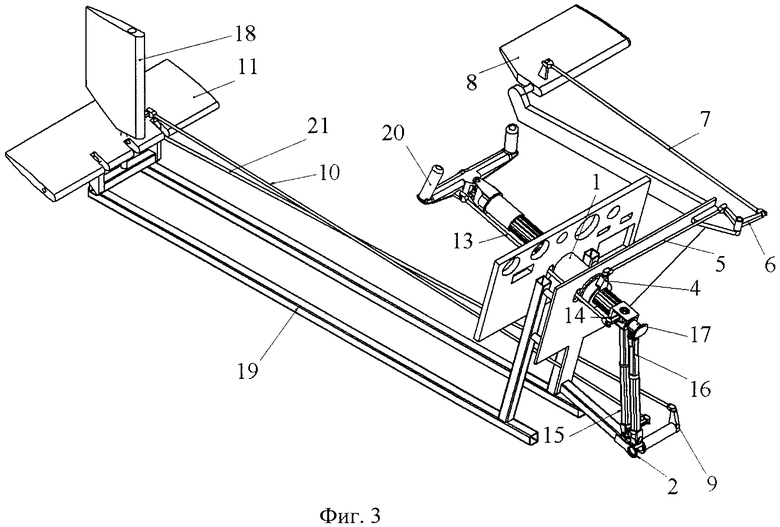
На фиг.3 показано предельно заднее перемещение штурвала на тангаж (положение ′′на себя′′).
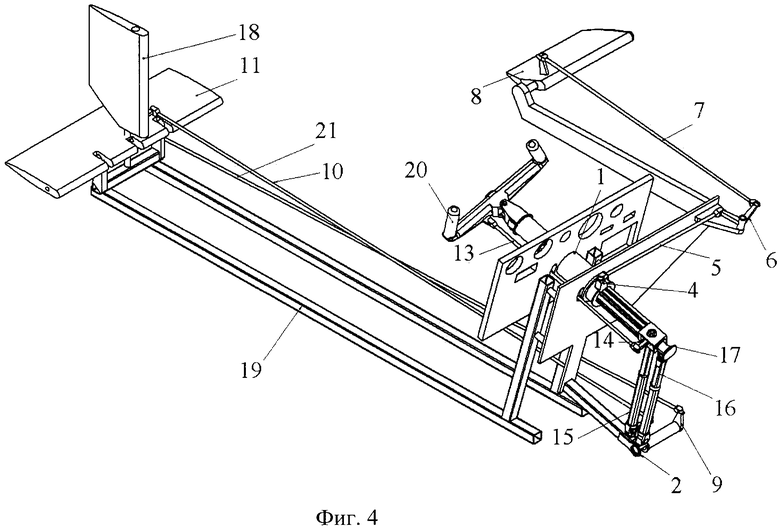
На фиг. 4 показано предельное отклонение штурвала по крену (отклонение элерона).
На фиг. 5 показано предельное отклонение штурвала по рысканью (отклонение руля направления).
Трехкоординатный пост ручного управления имеет штурвальный вал 1 (фиг. 1), ось качания телескопической тяги 2, ось навески штурвала 3, скользящая качалка привода элеронов 4, тяги привода элеронов 5 и 7, элерон 8, качалка привода руля высоты 9, руль высоты 11, кронштейн крепления тяги привода руля направления на штурвале 12, тяги привода руля направления 10 и 13, качалка привода руля направления 14, телескопический вал привода руля направления 15, телескопическая тяга привода руля высоты 16, поворотная серьга привода руля высоты 17, руль направления 18, каркас крепления элементов управления в составе стенда 19, штурвал 20, тяга привода руля высоты 21.
При развороте штурвала 20 (фиг. 1) в горизонтальной плоскости относительно оси 3, тяга 13, шарнирно закрепленная в кронштейне 12, повернет качалку 14, которая передаст движение через телескопический вал 15 и его нижний кронштейн на тягу 10, которая непосредственно соединена с рулем направления 18, руль направления 18 повернется. При повороте штурвала 20 в вертикальной плоскости совместно со штурвальным валом 1, вал через шлицевые пазы по его длине повернет скользящую качалку 4, которая удерживается скользящими захватами от продольных смещений, поворот качалки 4 вызовет перемещение тяг привода элерона 5 и 7 через качалку 6, тяга 7 повернет элерон 8. При перемещении штурвала 20 вдоль шлицевых направляющих пазов (′′на себя - от себя′′) произойдет перемещение серьги 17, которая шарнирно соединена с верхней точкой телескопической тяги 16, продольное перемещение вызовет смещение частей телескопической тяги и поворот нижней части тяги 16 совместно с качалкой 9, качалка 9 переместит тягу 21, которая в свою очередь повернет руль высоты 11.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатный пост ручного управления самолетом | 2016 |
|
RU2647220C2 |
| ТРЕХКООРДИНАТНЫЙ ПОСТ ДУБЛИРОВАННОГО РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2579417C2 |
| УНИВЕРСАЛЬНЫЙ ТРЁХКООРДИНАТНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2021 |
|
RU2794218C2 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
| ШТУРВАЛЬНАЯ КОЛОНКА САМОЛЕТА | 2007 |
|
RU2356793C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2122509C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ САМОЛЕТОМ | 1927 |
|
SU6615A1 |
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2420427C2 |
Изобретение относится к авиационной технике, в частности к конструкциям устройств управления самолетом. Пост ручного управления содержит штурвал, шлицевой штурвальный вал, установленный подвижно в направляющей трубе, проходящей через вырез в панели приборов, телескопическую тягу, телескопический вал, тяги и качалки. В конструкцию штурвала добавлена еще одна степень свободы, а именно штурвальная колонка имеет возможность не только вращения относительно собственной продольной горизонтальной оси совместно со штурвалом, но сам штурвал получает возможность поворачиваться относительно оси, перпендикулярной продольной оси колонки. Достигается снижение веса конструкции системы управления самолетом, не требуется согласование положения кресла по высоте и по расстоянию до педалей. 5 ил.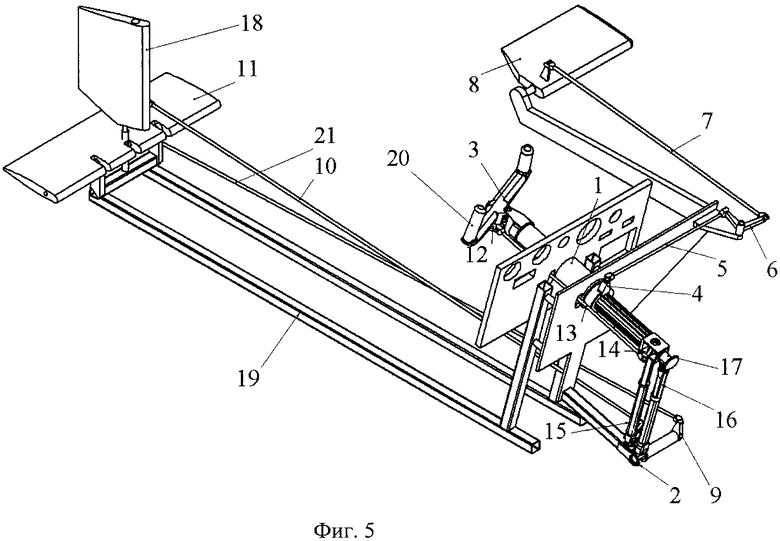
Пост ручного управления, содержащий штурвал, шлицевой штурвальный вал, установленный подвижно в направляющей трубе, проходящей через вырез в панели приборов, телескопическую тягу, телескопический вал, тяги и качалки, отличающийся тем, что в конструкции штурвала добавляется еще одна степень свободы, а именно штурвальная колонка имеет возможность не только вращения относительно собственной продольной горизонтальной оси совместно со штурвалом, но сам штурвал получает возможность поворачиваться относительно оси, перпендикулярной продольной оси колонки.
| US 2013031997 A1, 07.02.2013 | |||
| ШТУРВАЛЬНАЯ КОЛОНКА САМОЛЕТА | 2007 |
|
RU2356793C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2420427C2 |
| 0 |
|
SU163077A1 | |
| US 2014014781 A1, 16.01.2014. | |||

