Изобретение относится к авиации - к самолетам и вертолетам.
Известно, что эргономика управления самолетом сформировалась под влиянием первого примитивного самолета братьев Райт: летчик сидел практически между крыльями, поэтому управление элеронами наиболее просто было осуществить поперечными движениями рычага; а тяги от руля направления проходили продольно фюзеляжу, и поэтому наиболее простая конструкция управления ими подразумевала горизонтальное поперечное коромысло с педалями. См., например, А.С. 1062979.
С тех пор эргономика управления дошла до нас практически в неизменном виде, что объясняется традицией и преемственностью. Хотя современная техника, в частности электродистанционное управление, позволяет никак не увязывать направление управляющих усилий человека с движением аэродинамических поверхностей управления.
Современная эргономика не соответствует природным безусловным и повседневным условным инстинктам и рефлексам человека. Поэтому обучение управлению самолетом или вертолетом требует большого времени для синхронизации несвойственных человеку управляющих движений. И даже длительное обучение не гарантирует безупречного координированного управления, например при наведении бортового оружия истребителей, штурмовиков или вертолетов.
Сущность предлагаемого способа в том, что управляющие движения соответствуют всем рефлексам человека. Управление по крену осуществляется такими же движения, какие использует человек при ходьбе или при сидении на неустойчивом предмете - напряжением левой или правой ног.
Отсюда - простейший тренажер: представьте, что вы сидите на стуле /возможно, привязали к нему ремнями/, но у стула всего две продольно расположенных ножки посередине. См. фиг.1. Сидя на нем, вы вынуждены сохранять равновесие, напрягая левую или правую ногу при угрозе падения влево или вправо. И более того: если вы захотите накрениться влево или вправо, то вы координированно поджимаете соответствующую ногу, а другую несколько выпрямляете. Именно такие действия и будет делать летчик в предлагаемом способе управления по крену. Отклонение педалей желательно по вертикали, но возможно и в наклонном, и даже в горизонтальном направлении - моторика движения сохранится.
Применяемое в настоящее время управление направлением и тангажом также не эргономично. Чтобы совместить ось самолета с точкой прицеливания, лежащей, допустим, на 3 влево и на 2 верх, летчик должен отклонить педали на определенный угол и на другой определенный угол отклонить на себя рычаг управления. Трудность, а точнее - невозможность осуществить это координирование, приводит к тому, что летчик на последнем этапе прицеливания сначала подводит под цель одно направление /допустим, "подгоняет" под вертикаль/, а потом - второе /увеличивает тангаж/. За это время цель может изменить местоположение, и все необходимо начинать сначала. То есть наводка осуществляется поочередно по направлению и по тангажу методом последовательных приближений /при более значительных изменениях направления необходимо применять крен/.
Сущность предлагаемого способа управления по направлению и тангажу заключается в том, что эти два управления осуществляются одним привычным синхронизированным движением руки /при использовании штурвала - двух рук/. То есть, если летчику надо довернуть на 3 влево и на 2 вверх, это равносильно тому, что повернуть самолет на стереоугол 3,6° в направлении 33,7° к левой горизонтали. То есть повернуть ручку на угол 33,7° влево-вверх, и цель сама пройдет указанные 3,6° и окажется на линии прицеливания.
Очень важно при этом, чтобы эффективность горизонтальных и вертикальных рулей в данном диапазоне была строго одинакова, то есть чтобы одинаковое отклонение ручки влево-вправо и вверх-вниз вызывало одинаковую угловую скорость изменения направления и тангажа /не путать направление "вверх-вниз" с направлением "вперед-назад"!/.
Казалось бы, проще не стало. На самом деле мы каждую минуту делаем подобные движения. Например, когда тянемся к кнопке дверного звонка или нажимаем кнопки стационарного телефона, беря в руки любой предмет или наоборот - кладя его, пользуясь указкой, отверткой и т.п. Подходя к дверному звонку мы не задумываемся, на сколько градусов поднять руку, а на сколько повернуть ее в сторону. Рука безошибочно сама тянется к звонку, так как такие движения отработаны, координированы, синхронизированы, доведены до автоматизма многолетней ежеминутной практикой. Попробуйте встать перед стеной на расстоянии 50-70 см и нажать подушечкой указательного пальца на какой-нибудь ориентир на стене /щербинку, пятнышко/, затем на второй, третий,… десятый. Это и есть простейший тренажер предлагаемого управления по направлению и тангажу.
Возможны два основных конструктивных варианта такого управления.
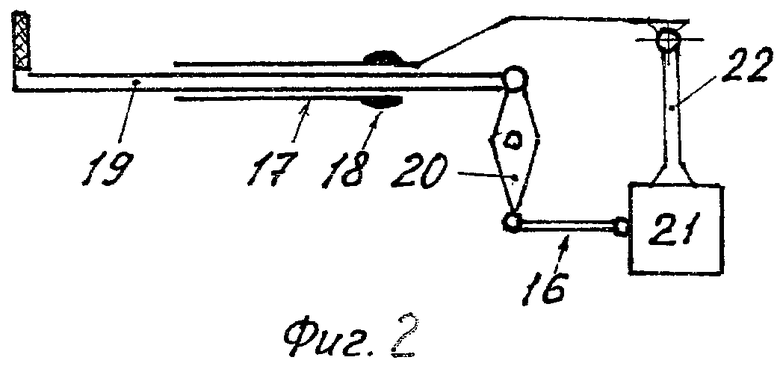
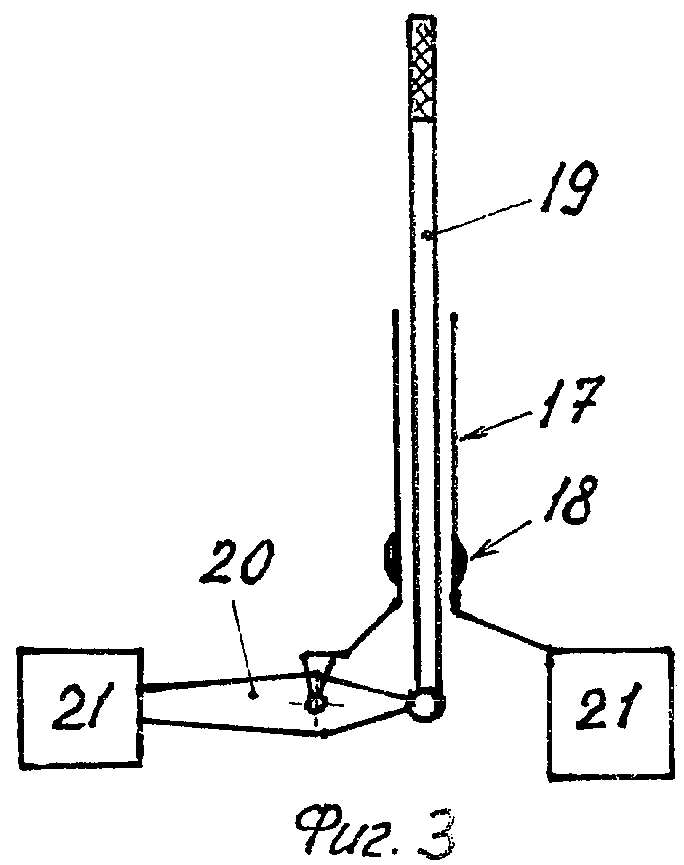
Вариант 1. Рычаг управления /со штурвалом или без/ расположен как обычно в полу или же закреплен горизонтально на стене кабины. Но рычаг - телескопический, он может отклоняться и выдвигаться влево-вправо и вверх-вниз /но не вперед-назад/. См. фиг.2, 3.
Вариант 2. Рычаг управления закреплен на передней надели кабины и расположен продольно-горизонтально в карданном шарнире или в шарнире равных угловых скоростей /ШРУС/. См. фиг.4. Этот вариант предпочтительней ввиду идентичности перемещений по двум ортогональным направлениям.
В обоих этих вариантах необходима весовая компенсация. То есть на продолжении рычага должен быть противовес, уравновешивающий вес рычага и частично вес руки летчика. Груз должен быть закреплен с возможностью перемещения для регулировки веса. Чтобы это не был бесполезный груз, в качестве противовеса можно применить аккумулятор, какой-нибудь электронный блок, ЗИП /ремкомплект и инструменты/, если он предусмотрен, сухой паек, небольшой баллон с "неприкосновенным" запасом газа или жидкости /например для пожаротушения/ и т.п.
Особо следует отметить, что в варианте 5 этим противовесом или частью его могут быть приборы, например спидометр, альтиметр, дисплей авиагоризонта, указатель топлива, вольтметр, амперметр и т.п. Размещенные в пространственном секторе позади шарнира они будут достаточно хорошо читаемы бинокулярным зрением.
Возможны и другие кинематические схемы механизма движения ручки, например из двух независимых параллелограммов /как в чертежной доске "Кульман"/ или двухкареточный механизм /также встречаем в конструкциях чертежных досок/, но они сложнее конструктивно.
Вариант 3. Комбинированный. Вместо ручки имеется штурвал, который может целиком двигаться также, как ручка, но дополнительно может отклоняться в угловом направлении. Штурвалом осуществляется управление по крену /вместо педалей/. Такое управление также достаточно эргономично: оно напоминает удержание предмета /например, тарелки с супом/ в горизонтальном положении. Однако в этом варианте руки слишком перегружены информативно - они управляют всеми тремя эволюциями самолета. Впрочем, есть у этого способа и достоинства: высвобождаются ноги, и возможно, большее быстродействие.
В вариантах 1, 2, 3 ручка /или втулка штурвала/ может иметь визир, совпадающий в прямом горизонтальном полете с линией прицеливания. Визиром может быть колечко или крестик, закрепленные на легкой стойке на ручке напротив "командного" глаза /официальный термин/. Для того чтобы в момент прицеливания изображение со второго глаза не мешало работе командного, на второй глаз может быть наложен затемненный светофильтр, ослабляющий его изображение. Или может быть наложен цветной светофильтр, например зеленый, а сам визир также сделать зеленым или серо-зеленым, тогда он "потеряется" на фоне всего остального зеленого изображения.
Еще более интересен вариант визира в виде цветного, например желтого, стеклышка. Если при этом закрыть некомандный глаз также желтым светофильтром, то для него визир станет практически невидимым, а для командного глаза будет хорошо различаться как желтое пятнышко.
Кроме того, можно на командный глаз наложить при этом другой светофильтр контрастного цвета. Через него визир /колечко или стеклышко/ будет выглядеть более контрастным.
При наличии такого визира и при уже упоминавшемся равенстве эффективности рулей управление самолетом становится очень простым и приятным: совмещаем визир с объектом, на который хотим повернуть, и самолет сам на него повернет - именно на 33,7° к левой горизонтали и как раз до тех пор, пока не повернет на стереоугол 3,6°. После этого визир совпадет с продольной линией самолета, рули встанут в нейтральное положение, и дальнейшее угловое движение прекратится. Для ускорения маневра можно применить перерегулирование - завести визир в том же направлении за цель и незадолго до того, как цель окажется на линии прицеливания, быстро наложить визир на цель.
Такая простота управления сохранится и на вираже - движением ног самолету дается крен, визир наводится на цель, и самолет сам изменит параметры виража - радиус и скольжение /кроме крена/ так, что нос самолета будет смотреть на цель. Для упреждения визир наводится в точку упреждения.
Предлагаемое управление обеспечит подавляющее преимущество при сложном пилотировании. Если провести учебный бой между истребителями или штурмовиками с традиционным и с предлагаемым управлением, то победа последних обеспечена за счет быстроты и точности наведения.
Основной трудностью при внедрении данного изобретения является переучивание. Но, во-первых, оно будет происходить на удивление легко: ведь те повседневные рефлексы, которые приходилось заглушать в себе при традиционном способе пилотирования, теперь не требуется подавлять /просто "не упади со стула"и "покажи пальцем", куда тебе надо/.
А, во-вторых, смену поколения самолетов следует подгадать под смену поколения летчиков. И так постепенно и естественно заменить летчиков и самолеты сначала в одном полку или хотя бы в одной эскадрильи, затем в другом и т.д.
Изобретение может быть внедрено полностью или частично, т.е. педальное управление управляет креном, а рычаг прежней конструкции управляет тангажом и направлением /а не креном/. Эффективность частичного внедрения будет, конечно, ниже.
На фиг.1 изображен тренажер для вариантов 1-3, где: 1 - сиденье, 2 - спинка, 3 - две ножки.
На фиг.2-4 упрощенно изображены варианты управления направлением и тангажом: на фиг.2 - подвариант 1 с горизонтальным боковым рычагом, на фиг.3 - подвариант о вертикальным рычагом /виды сзади/, и на фиг.4 - 3-й вариант, вид сбоку, где: 17 - рычаг управления с шарниром 18, 19 - телескопическая подвижная часть рычага, 20 - вспомогательное коромысло противовеса 21, 16 - тяга, 22 - вспомогательный рычаг противовеса, 23 - визир.
На фиг.5 изображен возможный вид с места летчика при управлении по варианту 5, где: 24 - линия прицеливания, 25 - цель.
Работает тренажер на фиг.1 так: садятся на стул и ногами удерживают равновесие, наклоняются влево и вправо.
Управление на фиг.2 работает так: перемещая вверх-вниз ручку бокового горизонтального рычага управления 17, закрепленного в плоском шарнире 18 на боковой стенке кабины, перемещают связанные с ним тяги рулей высоты /не показаны/. Такое отклонение ручки приводит к обратному перемещению противовеса 21, происходит весовая компенсация.
Отклонение ручки влево-вправо приводит к перемещению телескопической части рычага 19, которая через вспомогательное коромысло 20 и тягу 16 перемещает противовес в противоположном направлении, изменяя плечо весовой компенсации. К рычагу 19 крепятся тяги руля направления /не показаны/.
Управление на фиг.2 работает так: отклонение ручки влево-вправо приводит к отклонению рычага 17 в плоском шарнире 18 и отклонению руля направления. Возникающий при отклонении ручки от вертикали "падающий" момент компенсируется перемещением двух противовесов 21, общий центр масс которых находится на оси рычага 18. Перемещение ручки вверх-вниз компенсируется перемещением через вспомогательное коромысло 20 левого противовеса 21 и приводит к отклонению рулей высоты. Весовая компенсация обеспечивается при всех перемещениях.
Управление на фиг.4 работает так: при перемещении рычага управления 17 в карданное шарнире 18 происходит отклонение рулей направления и высоты /тяги не показаны/. Противовес 21 на другом конце рычага компенсирует вес рычага и руки. На ручке рычага имеется визир 23.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| АДАПТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ | 2012 |
|
RU2513884C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| АВИАГОРИЗОНТ | 2008 |
|
RU2390726C1 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| АВИАГОРИЗОНТ | 2010 |
|
RU2428657C1 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |


Изобретения относятся к области авиации, более конкретно к способу управления летательного аппарата и устройству для реализации данного способа. Способ управления заключается в том, что управление направлением и тангажом осуществляется отклонением рукоятки управления или штурвала целиком влево-вправо и вверх-вниз. Устройство для реализации способа содержит телескопический рычаг управления, расположенный вертикально или горизонтально-поперек относительно оси самолета и имеющий противовес /противовесы/ или рычаг управления, расположеный горизонтально-вдоль относительно оси самолета и имеющий противовес. Технический результат заключается в упрощении управления летательным аппаратом. 2 н. и 4 з.п. ф-лы, 5 ил.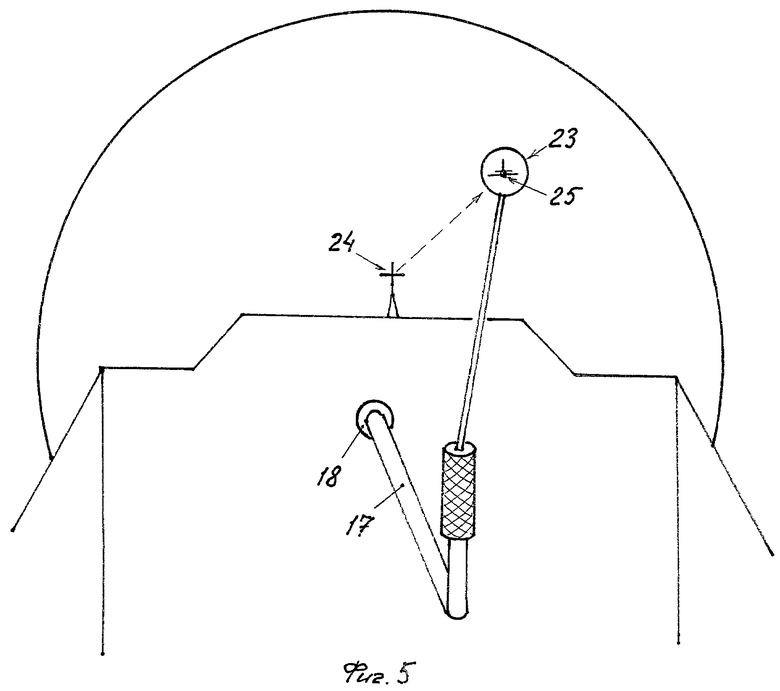
1. Способ управления летательным аппаратом, отличающийся тем, что управление направлением и тангажом осуществляется отклонением рукоятки управления или штурвала целиком влево-вправо и вверх-вниз.
2. Способ по п.1, отличающийся тем, что управление по крену осуществляется поворотом штурвала в угловом направлении.
3. Устройство для реализации способа по п.1, отличающееся тем, что телескопический рычаг управления расположен вертикально или горизонтально-поперек относительно оси самолета и имеет противовес /противовесы/, или рычаг управления расположен горизонтально-вдоль относительно оси самолета и имеет противовес.
4. Устройство по п.3, отличающееся тем, что на рычаге управления закреплен визир или прозрачная цветная пластина.
5. Устройство по п.4, отличающееся тем, что во время наведения самолета некомандный глаз закрывается затемненным или цветным светофильтром, визир имеет цвет светофильтра.
6. Устройство по п.5, отличающееся тем, что командный глаз закрывается светофильтром другого цвета.
| Статья в Интернет «Nieuport IV», 2004 г., http://www.airwar.ru/enc/otherl/nieup4.html | |||
| УСТРОЙСТВО ДЛЯ НОЖНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2177896C2 |
| УСТРОЙСТВО С РАЗНОХОДОВЫМИ ПЕДАЛЯМИ ДЛЯ УПРАВЛЕНИЯ РУЛЕМ НАПРАВЛЕНИЯ САМОЛЕТА | 2000 |
|
RU2178371C1 |
| SU 1361892 A1, 07.03.1992 | |||
| US 1919520 A, 25.07.1933 | |||
| Система управления летательнымАппАРАТОМ ВЕРТиКАльНОгО ВзлЕТАи пОСАдКи | 1974 |
|
SU799636A3 |
| Устройство для обогащения полезных ископаемых | 1974 |
|
SU541506A1 |

