Изобретение относится к авиационной технике, более конкретно к ручным управляющим устройствам для приведения в действие поверхностей управления летательного аппарата, и может быть применено при установке его между приборной доской и креслом пилота к потолку кабины для экипажа, состоящего из одного человека.
Известные посты ручного управления в составе штурвала и штурвальной колонки обладают ограниченными функциональными возможностями, так как с их помощью можно управлять только двумя управляющими поверхностями, а именно рулем высоты, отклоняя штурвальную колонку от себя и на себя, изменяется угол тангажа самолета, и элеронами, поворачивая штурвал относительно продольной оси, проходящей через верхнюю часть штурвальной колонки (патенты RU 2356793 C1, SU 999406 A1, SU 1376432 A1, RU 2420427 C2, US 2009/0321548 A1, US 2014/0014781 A1 и т.д.). Недостатком такого ручного управления является то, что для управления по углу рысканья требуется комплекс ножного управления, а именно педали.
Известен пост ручного управления, имеющий еще одну степень свободы, при этом штурвальная колонка имеет возможность вращения относительно собственной продольной оси, перпендикулярной основанию (US 1798724 А, B64C 13/04, 31.03.1931, описание сс. 1, 2, фиг. 1-4, всего 4 с.), чем обеспечивается продольное управление летательным аппаратом и отказ от ножного управления.
Наиболее близким к заявляемому техническому решению по достигаемому техническому результату является пост ручного управления, в котором в конструкции штурвала добавляется еще одна степень свободы, а именно штурвальная колонка совместно со штурвалом, который через шлицевой штурвальный вал, установленный подвижно в направляющей трубе, проходящей через вырез в панели приборов, сохраняет возможность вращения относительно собственной продольной горизонтальной оси совместно со штурвалом, а сам штурвал имеет возможность отдельно поворачиваться относительно оси, перпендикулярной продольной оси вала (заявка на изобретение РФ №2014132977). Данное устройство принято в качестве прототипа изобретения.
Прототип поста управления обеспечивает передачу управления на рули высоты, рули направления и элероны без применения поста ножного управления (педалей).
Недостатком прототипа является то, что перемещения рулей выполнены через сложные технические приспособления в виде телескопических тяг, причем тяга руля поворота должна также передавать вращение при различных продольных положениях подвижной и неподвижной секций. Такое решение связано с высокой трудоемкостью изготовления и издержками веса.
Задачей и техническим результатом изобретения является устройство ручного трехкоординатного поста управления летательным аппаратом, который, имея три степени свободы, обеспечивает независимое одновременное управление по всем трем каналам, а именно по тангажу, крену и рысканью, и отличается простотой конструкции.
Поставленная задача решена следующим образом: трехкоординатный пост ручного управления самолетом, содержащий штурвал, качалки, тяги, кронштейны, отличается тем, что дополнительная, относительно продольной оси летательного аппарата, степень свободы штурвала по управлению креном обеспечивается путем установки закрепленной в шарнирах тонкостенной трубы, внутри которой максимально близко к оси качания проходят тяги управления рулем высоты и рулем направления, что практически исключает влияние канала крена на рули высоты и направления.
В конструкции отсутствуют скользящие пары трения в виде телескопической тяги. Эффект независимости каналов управления проверен на 3D модели учебного планера, которая выполнена в программе SolidWorks.
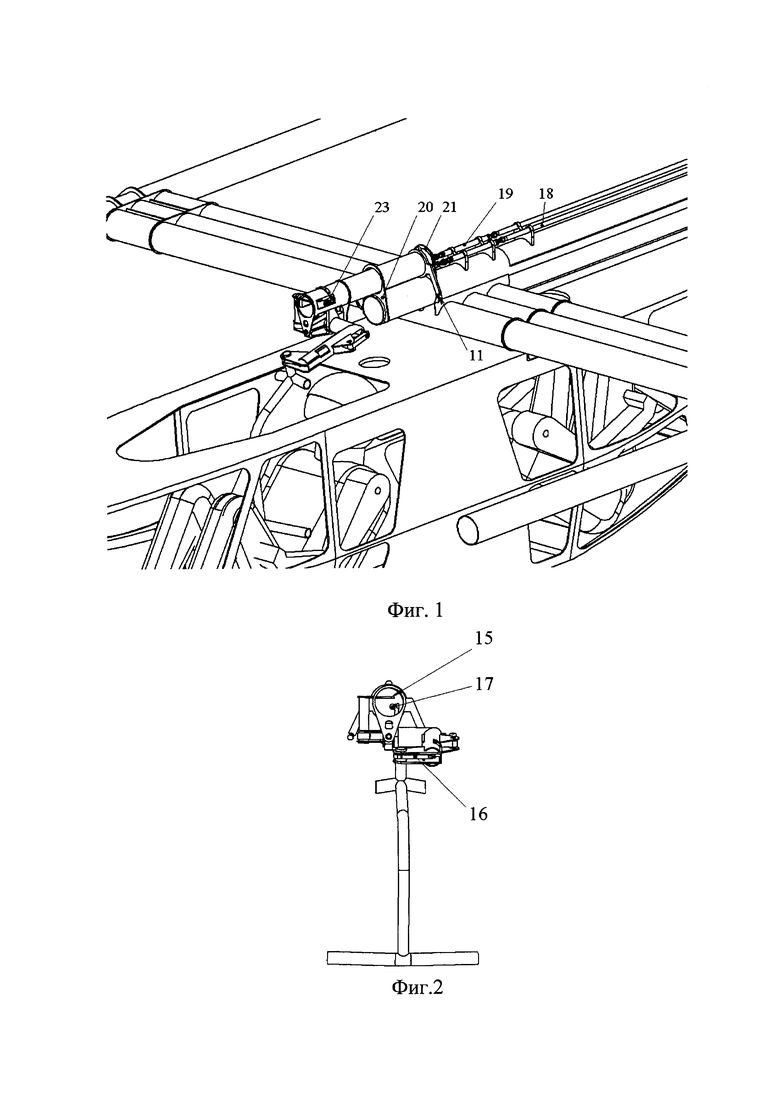
На фиг. 1 показан общий вид трехкоординатного поста управления летательным аппаратом в составе учебного планера.
На фиг. 2 показан отдельно пост управления, вид спереди.
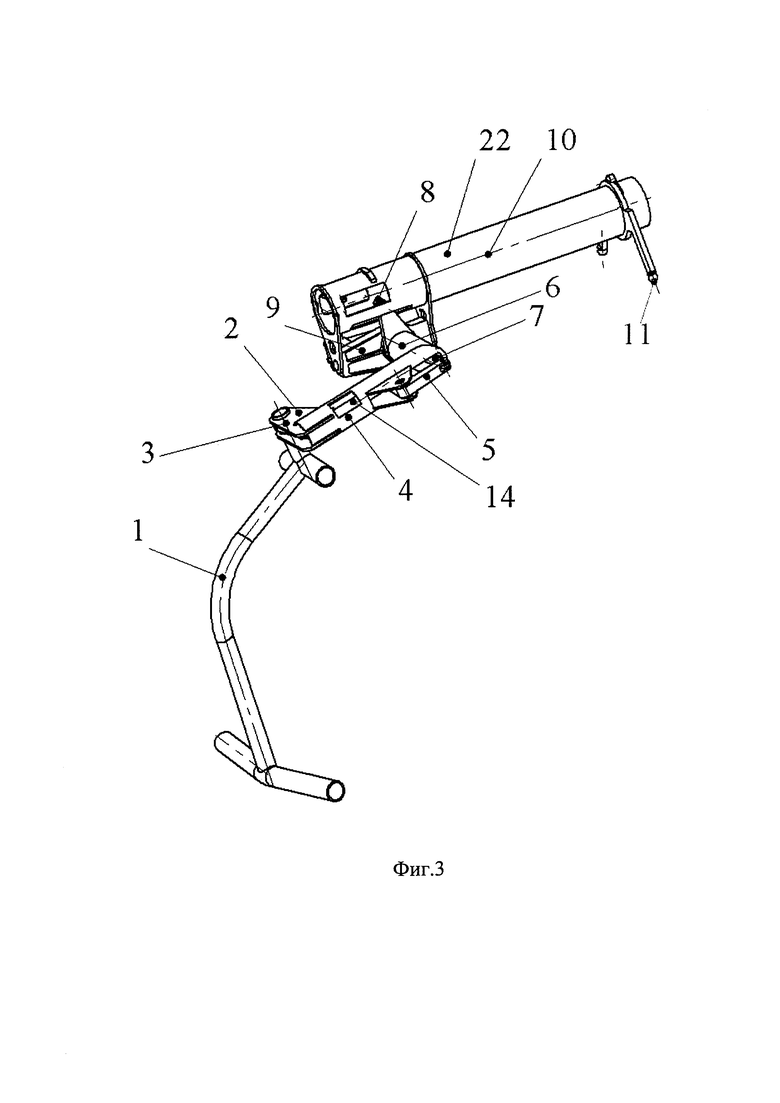
На фиг. 3 показан отдельно пост управления, вид слева.
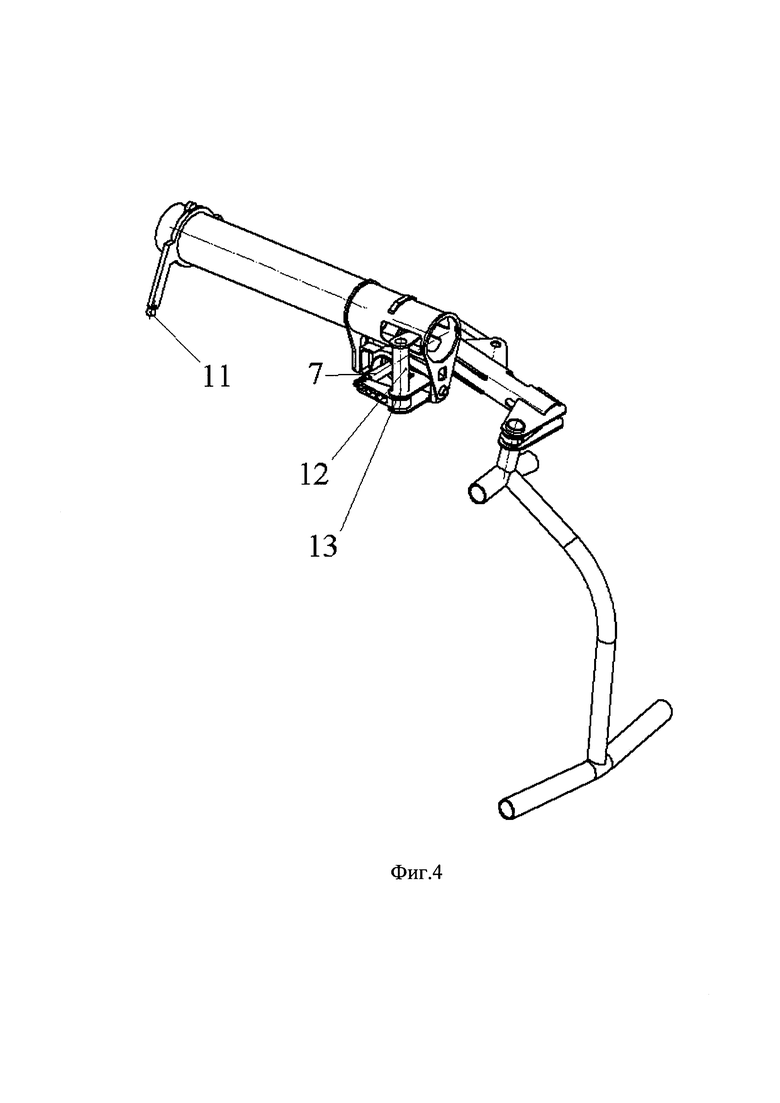
На фиг. 4 показан отдельно пост управления, вид справа.
Трехкоординатный пост ручного управления имеет корпус 22 (фиг. 3), который шарнирно установлен в неподвижных кронштейнах 20 и 21 (фиг. 1), его продольная ось качания 10 позволяет штурвальной колонке 1 перемещать кронштейны крепления тяг привода элеронов 11 (фиг. 3) тяги (условно не показаны), кронштейн 2 (фиг. 1) крепления качалки привода руля направления 16 (фиг. 2), далее соединенные с качалкой 5 (фиг. 1) тяга 7, соединенная с двухуровневой качалкой 12 (фиг. 4), к верхнему плечу 15 (фиг. 2) которой крепится промежуточная тяга 23, и далее тяга 19 привода руля направления; качалка 4 (фиг. 3) привода руля высоты, внутри которой проходит продольно тяга 14 привода руля направления и шарнирно закреплена качалка 5 привода руля направления, качалка 14 шарнирно закреплена в кронштейне 9, который жестко крепится к корпусу 22 поста управления, на рычаге 8 качалки 14 в верхней точке шарнирно крепится промежуточная тяга 17 руля высоты, которая соединена с тягой 18, которая продольно перемешается в направляющих люнетах хвостовой части.
Устройство работает следующим образом: при развороте штурвальной колонки 1 относительно оси 3 (фиг. 1) происходит перемещение кронштейна 16 (фиг. 2), тяги 14 (фиг. 3), кронштейна 5, тяги 7, кронштейн 12 повернется относительно оси 13 (фиг. 4) и повернет качалку 15 (фиг. 2), качалка 15 перемещает промежуточную тягу 23 (фиг. 1), которая перемещает тягу 19 непосредственного привода руля направления. При отклонении штурвальной колонки 1 "на себя-от себя" качалка 4, вращаясь относительно оси 6 (фиг. 3) в кронштейне 9, повернет рычаг 8, к верхнему краю которого закреплена промежуточная тяга 17, которая перемещает тягу 18 непосредственного привода руля высоты. При качании штурвальной колонки относительно оси 10 (фиг. 3) будут перемещаться законцовки 11 (фиг. 3), к которым крепятся тяги непосредственного привода элеронов. Повороты штурвальной колонки относительно трех осей обеспечивают управление летательным аппаратом в любой последовательности и любых сочетаниях отклонений без перекрестного воздействия, так как поворот корпуса 22 относительно оси 10 не оказывает практического воздействия на положения тяг 18 и 19 управления рулями высоты и направления. Так как оси тяг 18 и 19 проходят вдоль оси вращения привода элеронов на небольшом расстоянии согласно фиг. 2 возмущения перемещений составляют величины второго порядка малости, и практическом расчете не учитываются.
Техническим результатом применения трехкоординатного штурвала является возможность независимого управление по всем трем каналам, а именно по тангажу, крену и рысканью, и отличается простотой конструкции. Размещение штурвала в верхней части кабины обеспечивает более короткие трассы управления рулями для летательных аппаратов типа высокоплан и биплан, для летательных аппаратов типа низкоплан пост управления размещается в нижней части кабины.
Изобретение относится к авиационной технике и касается поста ручного управления летательного аппарата (ЛА). Трехкоординатный пост ручного управления содержит штурвал, качалки, тяги, кронштейны. При этом пост имеет дополнительную относительно продольной оси ЛА степень свободы штурвала по управлению креном, которая обеспечивается путем установки закрепленной в шарнирах тонкостенной трубы. Внутри трубы максимально близко к оси качания проходят тяги управления рулем высоты и рулем направления, что практически исключает влияние канала крена на рули высоты и направления. Достигается независимое одновременное управление по тангажу, крену и рысканью, простота конструкции. 4 ил.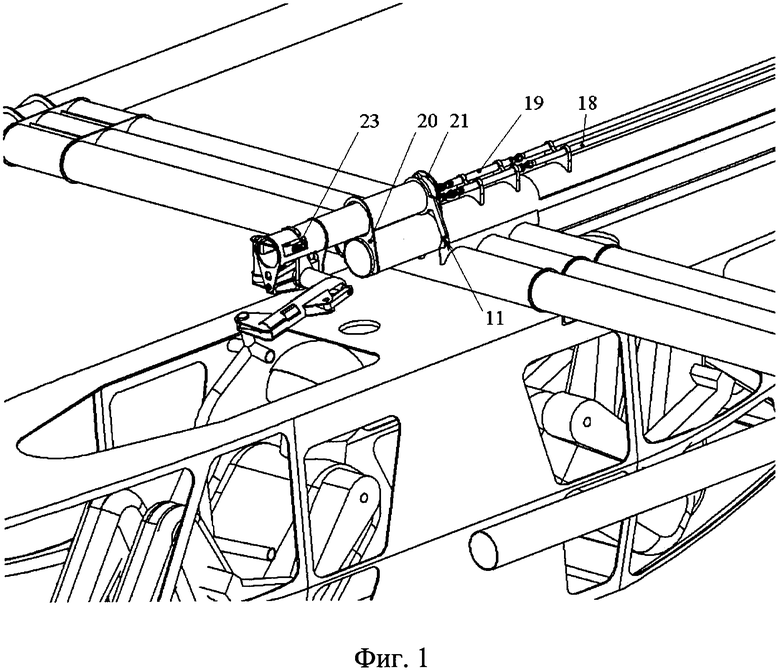
Трехкоординатный пост ручного управления самолетом, содержащий штурвал, качалки, тяги, кронштейны, отличающийся тем, что дополнительная относительно продольной оси летательного аппарата степень свободы штурвала по управлению креном обеспечивается путем установки закрепленной в шарнирах тонкостенной трубы, внутри которой максимально близко к оси качания проходят тяги управления рулем высоты и рулем направления, что практически исключает влияние канала крена на рули высоты и направления.
| ТРЕХКООРДИНАТНЫЙ НИЖНИЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2579250C2 |
| ТРЕХКООРДИНАТНЫЙ ПОСТ ДУБЛИРОВАННОГО РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2579417C2 |
| US 5190243 A, 02.03.1993 | |||
| ШТУРВАЛЬНАЯ КОЛОНКА САМОЛЕТА | 2007 |
|
RU2356793C1 |
| Устройство для измерения малых коэффициентов гармоник сигналов | 1990 |
|
SU1798724A1 |
| US 2014014781 A1, 16.01.2014. | |||

