Область техники, к которой относится изобретение.
Изобретение относится к подъемникам для жилых, общественных, промышленных зданий и сооружений, а более конкретно к подъемно-транспортным системам для обслуживания фасадов зданий, включающим в себя расположенные на наружной стене здания рельсовые или мачтовые направляющие, снабженные зубцами или другими зацепными элементами, например, штифтами или роликами, и подъемник, имеющий привод, причем привод включает в себя двигатель с редуктором, и зубчатое колесо, установленное на ведущем валу редуктора с возможностью зацепления с упомянутыми зубцами направляющих таким образом, чтобы при вращении зубчатого колеса упомянутый подъемник перемещался по направляющим, а также средства управления, выполненные с возможностью управления двигателем.
В данной работе используются следующие термины.
Вертикаль - направление, параллельное силе тяжести.
Горизонталь - направление, перпендикулярное силе тяжести.
Продольное направление - направление вдоль поверхности здания или вдоль касательной к поверхности здания.
Поперечное направление - направление, перпендикулярное поверхности здания.
Зубчатое колесо - деталь, выполненная с возможностью вращения вокруг своей оси и имеющая выступы произвольной формы. Сюда же относится вариант выполнения - звездочка, и любой другой вариант исполнения детали с зубцами или другими зацепными элементами, например штифтами или роликами.
Уровень техники
Настоящее изобретение относится к подъемно-транспортной системе для обслуживания фасадов зданий, включающая в себя расположенные на наружной стене здания рельсовые или мачтовые направляющие, снабженные зубцами, и подъемник, имеющий привод, причем привод включает в себя двигатель с редуктором, и зубчатое колесо, установленное на ведущем валу редуктора с возможностью зацепления с упомянутыми зубцами направляющих таким образом, чтобы при вращении зубчатого колеса упомянутый подъемник перемещался по направляющим, а также средства управления, выполненные с возможностью управления двигателем.
Такая система описана в патенте на полезную модель РФ №134917, опубликованном в 2013 году.
Данная система является наиболее близкой по технической сути и достигаемому техническому результату, и выбрана за прототип предлагаемого изобретения.
Недостатком этого прототипа является невозможность использования его на зданиях сложной формы, имеющих сложную криволинейную поверхность фасада, причем таких зданий становится все больше.
Это связано с тем, что с помощью системы, описанной в прототипе, невозможно обеспечить доступ до различных участков фасадов зданий, имеющих сложную криволинейную поверхность фасада, так как система в прототипе имеет возможность перемещаться только по единственной вертикальной направляющей, а в случае здания сложной формы такого направления может и не быть. Это делает систему в прототипе абсолютно непригодной для использования на зданиях, имеющих сложную криволинейную поверхность фасада.
Кроме того, есть и другие недостатки прототипа, например:
- указанный прототип не может обеспечить доступ к протяженному по горизонтали участку фасада здания;
- указанный прототип не имеет возможности стабилизации горизонтального положения платформы;
- указанный прототип не может менять геометрию самой платформы, приводя ее в соответствие форме фасада здания.
Раскрытие изобретения
Настоящее изобретение главным образом имеет целью предложить подъемно-транспортную систему для обслуживания фасадов зданий, позволяющую по меньшей мере сгладить как минимум один из указанных выше недостатков, а именно обеспечить расширение области применения системы за счет возможности использования ее на фасадах зданий сложной формы, что и является поставленной технической задачей.
Для достижения этой цели рельсовые или мачтовые направляющие имеют форму, повторяющую форму здания, и крепятся к зданию посредством кронштейнов, проходящих через фасад здания и закрепленных на несущих конструкциях здания, а подъемник включает в себя платформу, каждый край которой шарнирно закреплен к тележке, представляющей собой раму, связывающую две каретки, каждая из которых представляет собой систему направляющих упорных роликов, опирающихся на рельсовые или мачтовые направляющие.
Благодаря данным выгодным характеристикам появляется возможность использования предлагаемой системы на фасадах зданий сложной формы. Это обеспечивается специальной формой направляющих, которые крепятся к зданию на его несущих конструкциях, и специальной платформой, расположенной между двумя направляющими, которая крепится к тележкам, а те через каретки, каждая из которых представляет собой систему направляющих упорных роликов, опирающихся на рельсовые или мачтовые направляющие.
Существует также преимущественный вариант изобретения, в котором платформа выполнена в виде телескопической секционной платформы. Благодаря данной выгодной характеристике появляется возможность использования подъемно-транспортной системы в тех случаях, когда направляющие расположены на сравнительно большом расстоянии друг от друга, на котором начинает сказываться криволинейность фасада и необходимо адаптировать форму самой платформы к форме криволинейного фасада. Кроме того, такой признак позволяет передвигать платформу в вертикальном направлении с одновременным изменением ее формы, опять-таки позволяя приводить в соответствие форму платформы и форму криволинейного фасада. Для этого платформа и выполнена из отдельных секций, которые вложены друг в друга телескопически. В общем случае возможно соединение нескольких платформ в единую конструкцию сложной формы. А также нахождение нескольких платформ на разных уровнях на одних и тех же направляющих.
Существует также преимущественный вариант изобретения, в котором платформа имеет систему стабилизации горизонтального положения. Благодаря данной выгодной характеристике появляется возможность обеспечивать автоматическое сохранение горизонтального положения платформы. Это особенно важно в виду того, что на платформе подразумевается нахождение людей на большой высоте и нельзя допустить негоризонтального положения платформы.
Существует также вариант изобретения, в котором система стабилизация горизонтального положения платформы выполнена в виде механической или электромеханической системы стабилизации в поперечном направлении. Благодаря данной выгодной характеристике появляется возможность осуществлять стабилизацию платформы в поперечном направлении.
Существует также вариант изобретения, в котором система стабилизация горизонтального положения платформы имеет датчик, специально предназначенный для синхронизации движения кареток вдоль направляющих и подтормаживания опережающей кареток по сигналу от датчика для обеспечения стабилизации платформы в продольном направлении. Благодаря данной выгодной характеристике появляется возможность обеспечения стабилизации платформы в продольном направлении. Действительно, протяженность платформы в продольном направлении намного превосходит ее поперечные размеры. И обеспечение горизонтальной стабилизации в продольном направлении происходит благодаря синхронизации движение кареток по направляющим. Такая синхронизация и контролируется специальным датчиком, сигналы с которого и являются управляющими сигналами на перемещение кареток каждого из краев платформы.
Существует также еще один возможный вариант изобретения, в котором каретки имеют блокировочную систему, специально предназначенную для включения в момент экстренной аварийной ситуации. Благодаря данной выгодной характеристике появляется возможность повысить безопасность нахождения на платформе.
Существует также и такой вариант изобретения, в котором каретки оснащены концевыми выключателями. Благодаря данной выгодной характеристике появляется возможность обеспечить остановку каретки.
Существует также вариант изобретения, в котором к каждой каретке закреплен привод, перемещающий каретку вдоль направляющей посредством передачи «шестерня - зубчатая рейка» или «звездочка - цепь». Благодаря данной выгодной характеристике появляется возможность обеспечить зацепление элементов каретки и направляющих. Это может быть выполнено в таких вариантах, как «шестерня - зубчатая рейка» или «звездочка - цепь».
Существует также вариант изобретения, в котором двигатели оснащены нормальноблокированным электромагнитным тормозом, выполненным с возможностью срабатывания под действием пружины при отсутствии электричества. Благодаря данной выгодной характеристике появляется возможность повысить безопасность работ на предлагаемой системе и обеспечить альтернативный вариант торможения при отсутствии электричества.
Существует также вариант изобретения, в котором платформа имеет устройство контроля и ограничения скорости. Благодаря данной выгодной характеристике появляется возможность прогрессивной или плавной остановки платформы в случае превышения заданного значения
Существует также вариант изобретения, в котором платформы оснащены системой контроля сближения с выше- или нижерасположенной платформой при движении вверх или вниз. Система имеет два режима:
1 - для предотвращения двойной нагрузки на направляющие (обеспечивает расстояние между платформами гарантирующее передачу нагрузки на направляющую только от одной платформы),
2 - в случае способности направляющей воспринимать нагрузку от двух платформ система позволяет исключить столкновение платформ при движении вверх или вниз. Каретки оснащены независимыми датчиками для каждого режима.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения как устройства. Также совокупность существенных признаков предлагаемого изобретения не следует явным образом из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «изобретательский уровень» для изобретения.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
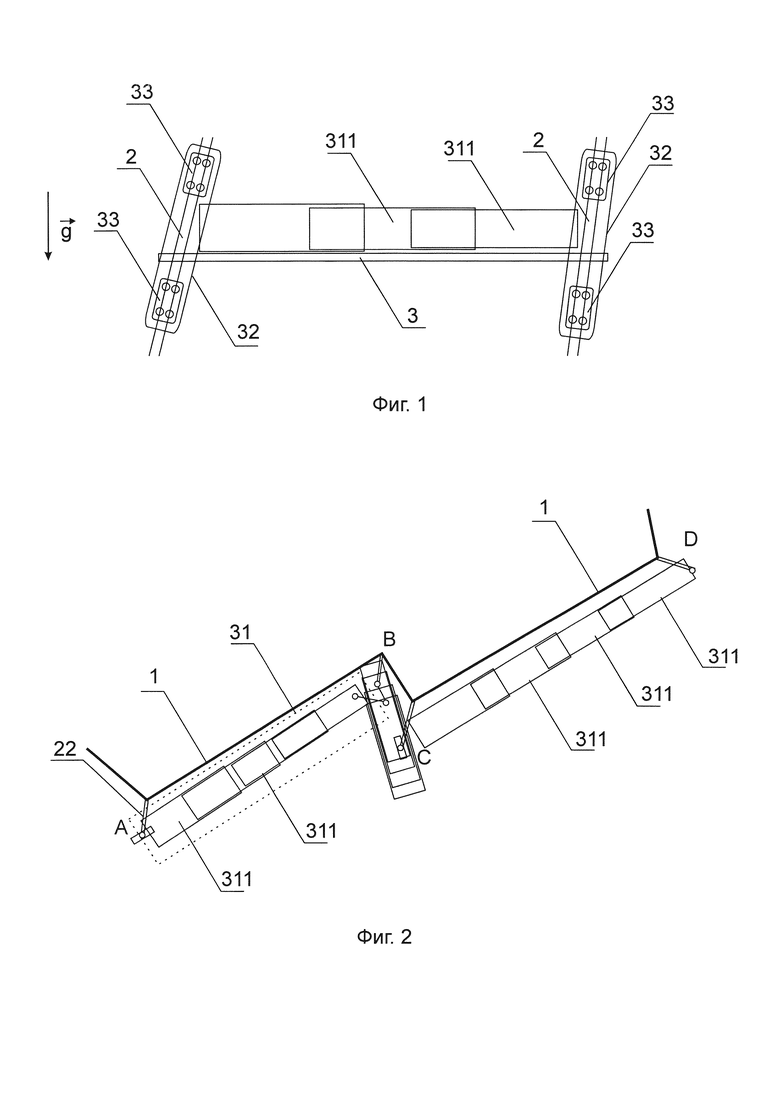
- фигура 1 изображает вид сбоку подъемно-транспортной системы для обслуживания фасадов зданий согласно изобретению, показано направление силы тяжести,
- фигура 2 изображает вид сверху подъемно-транспортной системы для обслуживания фасадов зданий согласно изобретению,
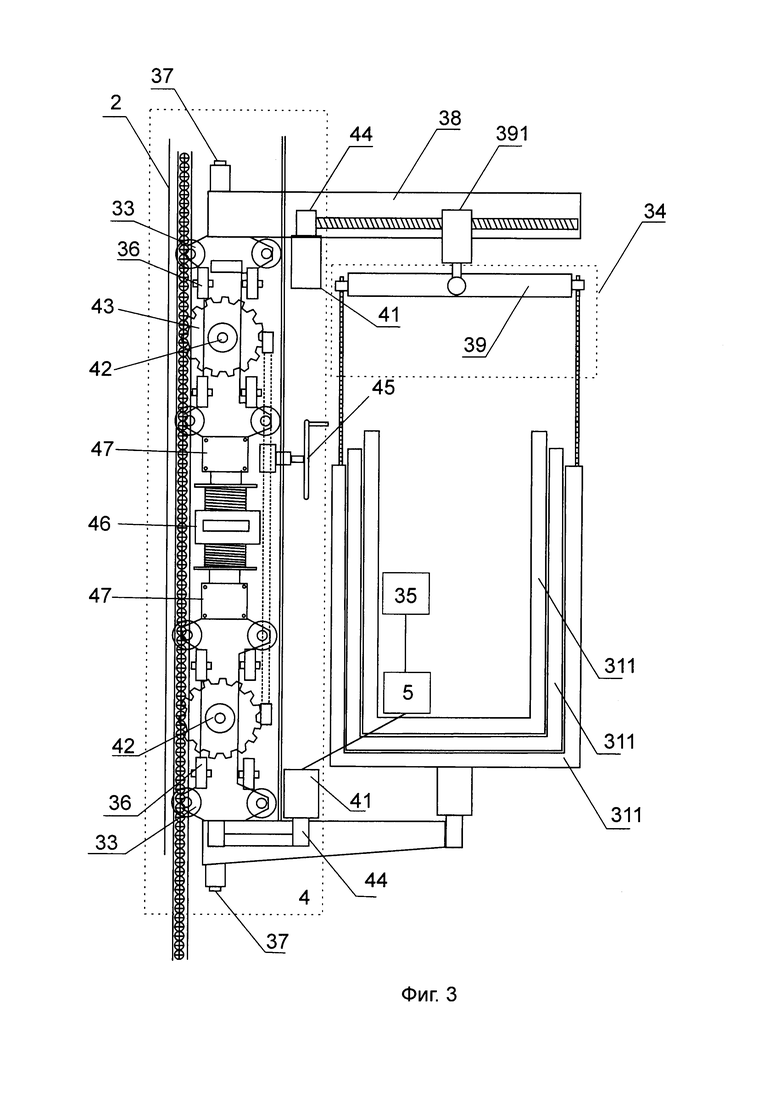
- фигура 3 изображает вид в вертикальном разрезе подъемно-транспортной системы для обслуживания фасадов зданий согласно изобретению,
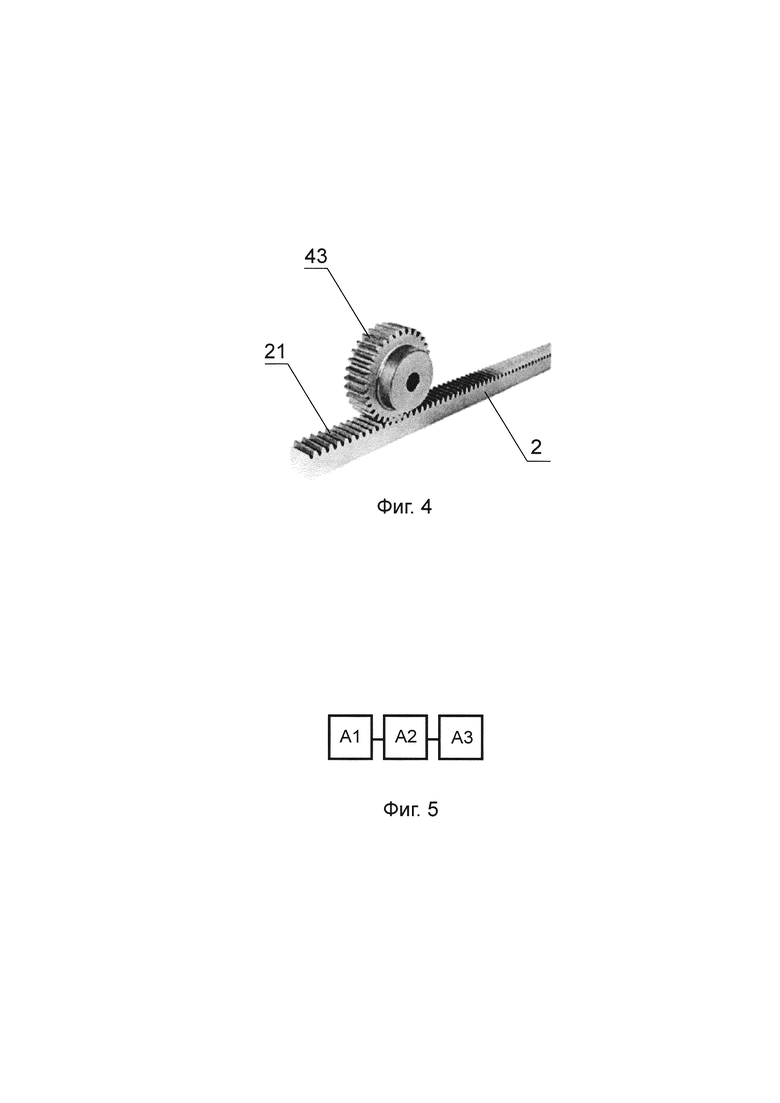
- фигура 4 изображает вариант соединения направляющей и зубчатого колесо привода подъемника согласно изобретению,
- фигура 5 схематично изображает этапы использования подъемно-транспортной системы для обслуживания фасадов зданий согласно изобретению.
На фигурах обозначено:
1 - наружная стена здания
2 - направляющие
21 - зубцы направляющих
22 - кронштейн направляющей
3 - подъемник
31 - платформа подъемника
311 - секция платформы подъемника
32 - рама подъемника
33 - каретка подъемника
34 - система стабилизации платформа подъемника в поперечном направлении
35 - датчик для обеспечения стабилизации платформы в продольном направлении
36 - блокировочная система
37 - концевой выключатель
38 - верхняя консоль
39 - верхняя траверса
391 - каретка верхней траверсы
4 - привод подъемника
41 - двигатель привода подъемника
42 - редуктор привода подъемника
43 - зубчатое колесо привода подъемника
44 - нормальноблокированный электромагнитный тормоз
45 - маховик вращения для аварийного спуска кареток
46 - устройство аварийного ловителя клиновой
47 - устройство перегруза
5 - средство управления
Согласно фигурам 1-4 подъемно-транспортная система для обслуживания фасадов зданий включает в себя расположенные на наружной стене 1 здания рельсовые или мачтовые направляющие 2, снабженные зубцами 21, и подъемник 3, имеющий привод 4. Рельсовые или мачтовые направляющие 2 имеют форму, повторяющую форму здания, и крепятся к зданию посредством кронштейнов 22, проходящих через фасад здания и закрепленных на несущих конструкциях здания. В зависимости от формы здания конфигурация направляющих 2 может быть разная - они могут быть не только вертикальными, но и наклонными, прямолинейными или криволинейными, с положительным углом или с отрицательным.
Подъемник 3 включает в себя платформу 31, каждый край которой шарнирно закреплен на раме 32, связывающей две каретки 33, соединенные с рамой шарнирно, каждая из которых представляет собой систему направляющих упорных роликов, опирающихся на рельсовые или мачтовые направляющие 2. Каждая рама 32 с каретками 33 имеет свой привод 4, который включает в себя двигатель 41 с редуктором 42, и зубчатое колесо 43, установленное на ведущем валу редуктора 42 с возможностью зацепления с упомянутыми зубцами направляющих 2 таким образом, чтобы при вращении зубчатого колеса 43 упомянутый подъемник 3 перемещался по направляющим 2, а также средства управления 5, выполненные с возможностью управления двигателем 41.
Платформа 31 может быть выполнена в виде телескопической секционной платформы, то есть состоять из секций 311, которые телескопически вставляются друг в друга и имеют фиксаторы, предотвращающие расцепление секций 311. При этом может быть вариант, когда платформа состоит из двух или более телескопических секций и нескольких секционных платформ с соединением типа «ножницы» - вариант на фигуре 2.
Платформа 31 может иметь систему стабилизации горизонтального положения.
Система стабилизация горизонтального положения платформы может быть выполнена в виде механической или электромеханической системы 34 стабилизации в поперечном направлении.
Система стабилизации горизонтального положения платформы может иметь датчик 35, специально предназначенный для синхронизации движения кареток вдоль направляющих и подтормаживания опережающей кареток по сигналу от датчика для обеспечения стабилизации платформы в продольном направлении.
Каретки 33 могут иметь блокировочную систему 36, специально предназначенный для включения в момент экстренной аварийной ситуации. Каретки могут быть оснащены концевыми выключателями 37.
При спуске/подъеме платформы 31 в штатном режиме при помощи привода 4 система стабилизации 34 действует посредством отключения питания опережающего привода через срабатывание концевого выключателя 37, приводимого от штока через кулачковый механизм. Этот же механизм через трос приводит в действие тормозное устройство при спуске в ручном режиме.
К каждой каретке 33 может быть закреплен привод 4, перемещающий каретку вдоль направляющей посредством передачи «шестерня - зубчатая рейка» или «звездочка - цепь». Цепь может быть гибкая или жесткая.
Двигатели 41 могут быть оснащены нормальноблокированным электромагнитным тормозом 44, выполненным с возможностью срабатывания под действием пружины при отсутствии электричества.
Как уже говорилось, каждая каретка 33 оснащается встроенным редуктором 42 с ведущим зубчатым колесом 43 или звездочкой. Движение на ведущие зубчатые колеса 43 передается через редуктор 42 от привода 41, размещенного на каретке 33 и подключаемого к редуктору 42 каретки через быстроразъемный конусный вал. Ведущие зубчатые колеса 43 кареток входят в зацепление с зубчатой рейкой (или статической поэтажно закрепленной цепью), закрепленной внутри направляющей 2.
На фигуре 3 показана принципиальная схема каретки 33 с системой стабилизации. В данном примере компенсация угла наклона основной направляющей 2 происходит за счет перемещения верхней консоли 38 к или от фасада вдоль верхней траверсы 39. Каретка 391 траверсы перемещается синхронно с подъемом/опусканием основных кареток 33 посредством передачи «гайка-винт», ведущий винт этой передачи кинематически соединен с редуктором каретки, что позволяет компенсировать задаваемые геометрией здания углы наклона основной направляющей 2 около +/-14°.
Скорость перемещения платформы 31 может быть до 9 м/мин. Электрическое питание для двигателей 41 привода подъемника подводится через шинопроводы, размещаемые внутри направляющих 2. Платформа 31 может быть также оборудована устройством контроля и ограничения скорости с прогрессивным (плавным) остановом в случае превышения заданного значения.
Устройство контроля скорости имеет шестерню, постоянно находящуюся в зацеплении с зубчатой рейкой (цепью) и приводящую в движение ось, на которой закреплен эталонный груз, под действием центробежной силы приводящий в действие тормозной конус, затягивающий тормоз, приводящий к плавному останову платформы с одновременным обесточиванием приводов.
Направляющая 2 представляет собой шестигранную (возможно, круглую или прямоугольную) трубу постоянного сечения с диаметром описанной окружности, например 450-500 мм.
По высоте направляющие 2 размещаются вдоль ребер здания. На каждом углу здания/сооружения наружном и внутреннем или поверхности может быть установлено по одной или более направляющей 2. Направляющие 2 крепятся к зданию посредством кронштейнов 22, проходящих через фасад здания и закрепленных на несущих конструкциях здания. Шаг установки кронштейнов по высоте - по расчету. Вдоль направляющей 2 могут быть установлены фасадные светильники. Направляющие 2 могут иметь декоративную отделку.
Телескопическая платформа 31 может иметь необходимую длину, например 20 м. Каждая из секций 311 представляет собой пространственно-стержневую систему, формирующую ограждение и настил для работы обслуживающего персонала, сблокированную с главной несущей балкой.
Телескопическая платформа в исполнении ABC (см. фигуру 3) секция АВ имеет длину около 20 м, секция ВС имеет длину около 8 м. Каждая из секций представляет собой пространственно-стержневую систему, формирующую ограждение и настил для работы обслуживающего персонала и сблокированную с главной несущей балкой. Ближайшее к направляющей В звено платформы АВ имеет дополнительную шину, вдоль которой перемещается специальная каретка, к которой через шарнир, стороной противоположной точке С, закреплена платформа ВС. Такая схема закрепления, с «плавающим» вдоль балки АВ узлом крепления балки ВС позволяет увеличить пролет между точками В и С в случаях их сильного сближения, тем самым уменьшить консольное выступание балки/платформы за точку С.
Угол между платформами может меняться от 0° до 107° при подъеме/спуске. Изменение данного угла происходит при подъеме/спуске платформы за счет геометрии направляющих и специальным образом построенной кинематической схемы системы.
От обледенения направляющих 2 могут быть предусмотрены трубчатые (или иные) уплотнители, устанавливаемые по краям продольного паза направляющей и закрывающие его, предотвращая попадание воды снега и льда внутрь направляющей 2. Шинопроводы также могут применяться во влагозащищенном исполнении.
Платформы 31 могут иметь систему контроля сближения с выше- или нижерасположенной платформой 31 при движении вверх или вниз. Указанная система имеет возможность работы в двух режимах:
- первый режим обеспечивает предотвращение двойной нагрузки на направляющие 2 за счет обеспечения такого расстояния между платформами 31, которое гарантирует передачу нагрузки на направляющую 2 только от одной платформы 31,
- второй режим, в случае возможности движения двух платформ 31 по одним направляющим 2, который обеспечивает исключение столкновения платформ 31 при движении вверх или вниз.
Для осуществления работы система контроля сближения каретки 33 включает в себя датчики измерения нагрузки на направляющие и датчики расстояния между платформами. Каждые датчики независимо друг от друга обеспечивают работы указанной системы в двух, указанных выше, режимах. (Датчики на фигурах не показаны).
Осуществление изобретения
Подъемно-транспортная системы для обслуживания фасадов зданий работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду, что данный пример не ограничивает применения изобретения.
Согласно фигуре 5:
Этап А1. Для перемещения предлагаемой системы необходимы направляющие 2, которые закрепляются к зданию/сооружению через кронштейны 22 и являются его частью. Поэтому указанные направляющие 2 устанавливаются во время строительства здания/сооружения или при его реконструкции предварительно.
Этап А2. Сборка предлагаемой системы производится с установки кареток 33 на направляющие 2. Далее устанавливается платформа 31, которая, в свою очередь, собирается из секций 311.
Этап A3. Управление системой осуществляется с пульта управления, относящегося к средству управления 5, и находящегося у обслуживающего персонала на платформе 31. Электроснабжение двигателя 41 привода подъемника осуществляется по шинопроводу, уложенному в направляющую 2. (На фигурах не показан).
Дополнительно у обслуживающего персонала и персонала в здании существует радиосвязь, с целью мониторинга операций и работ обслуживающего персонала, а также в случае экстренной или аварийной ситуации.
Последовательность этапов является примерной и позволяет переставлять, убавлять, добавлять или производить некоторые операции одновременно без потери возможности использования ее на фасадах зданий сложной формы.
Принцип работы системы позволяет устанавливать элементы направляющей 2 фрагментами как в сборе так и с подсборкой на месте установки, в том числе и с использованием самой платформы 31. Для этого к начальным секциям направляющей 2 закрепляется платформа 31 и после инспектирования она движется вверх до достижения верхней кареткой 33 крайней предельной точки. Далее монтажниками с платформы 31 устанавливается следующая секция направляющей 2 с каждой стороны, закрепляются после чего цикл повторяется.
Промышленная применимость
Предлагаемая подъемно-транспортная система для обслуживания фасадов зданий может быть осуществлена специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением произведены расчеты конструкции опытного образца подъемно-транспортной системы для обслуживания фасадов зданий.
Расчеты опытного образца системы показали, что она обеспечивает возможность:
- адаптировать форму самой платформы к форме криволинейного фасада,
- передвигать платформу в вертикальном направлении с одновременным изменением ее формы,
- соединять несколько платформ в единую конструкцию сложной формы,
- нахождения нескольких платформ на разных уровнях на одних направляющих, при этом исключать возможность повышенной нагрузки на направляющие и исключать возможность столкновения разных платформ, перемещающимся по одним и тем же направляющим,
- стабилизировать платформу по горизонтали как в продольном, так и в поперечном направлениях,
- экстренной блокировки движения кареток в экстренной ситуации,
- контроля и ограничения скорости платформы.
Таким образом, в данном изобретении достигнута поставленная задача - расширение области применения системы за счет возможности использования ее на фасадах зданий сложной формы.
Дополнительным полезным техническим результатом заявленного изобретения является то, что оно позволяет:
- производить очистку фасадов здания сложной формы;
- производить замену стекла и ремонт конструкции фасада здания сложной формы;
- обеспечивать доставку грузов и персонала к месту работ.
Изобретение относится к подъемникам для жилых, общественных, промышленных зданий и сооружений, а более конкретно к подъемно-транспортным системам для обслуживания фасадов зданий, включающим в себя расположенные на наружной стене здания рельсовые или мачтовые направляющие, снабженные зубцами, и подъемник, имеющий привод. Привод включает в себя двигатель с редуктором, и зубчатое колесо, установленное на ведущем валу редуктора с возможностью зацепления с упомянутыми зубцами направляющих таким образом, чтобы при вращении зубчатого колеса упомянутый подъемник перемещался по направляющим. Система имеет также средства управления, выполненные с возможностью управления двигателем. Согласно изобретению рельсовые или мачтовые направляющие имеют форму, повторяющую форму здания, и крепятся к зданию посредством кронштейнов, проходящих через фасад здания и закрепленных на несущих конструкциях здания, а подъемник включает в себя платформу, каждый край которой шарнирно закреплен на раме, связывающей две каретки, каждая из которых представляет собой систему направляющих упорных роликов, опирающихся на рельсовые или мачтовые направляющие. Достигаемый технический результат - расширение области применения системы за счет возможности использования ее на фасадах зданий сложной формы. 6 з.п. ф-лы, 5 ил.
1. Подъемно-транспортная система для обслуживания фасадов зданий, включающая в себя расположенные на наружной стене здания рельсовые или мачтовые направляющие, снабженные зубцами, и подъемник, имеющий привод, причем привод включает в себя двигатель с редуктором, и зубчатое колесо, установленное на ведущем валу редуктора с возможностью зацепления с упомянутыми зубцами направляющих таким образом, чтобы при вращении зубчатого колеса упомянутый подъемник перемещался по направляющим, а также средства управления, выполненные с возможностью управления двигателем, отличающаяся тем, что рельсовые или мачтовые направляющие имеют форму, повторяющую форму здания, и крепятся к зданию посредством кронштейнов, проходящих через фасад здания и закрепленных на несущих конструкциях здания, а подъемник включает в себя платформу, каждый край которой шарнирно закреплен на раме, связывающей две каретки, каждая из которых представляет собой систему направляющих упорных роликов, опирающихся на рельсовые или мачтовые направляющие.
2. Подъемно-транспортная система по п. 1, отличающаяся тем, что платформа выполнена в виде телескопической секционной платформы.
3. Подъемно-транспортная система по п. 1, отличающаяся тем, что каретки оснащены концевыми выключателями.
4. Подъемно-транспортная система по п. 1, отличающаяся тем, что к каждой каретке закреплен привод, перемещающий каретку вдоль направляющей посредством передачи «шестерня - зубчатая рейка» или «звездочка - цепь».
5. Подъемно-транспортная система по п. 1, отличающаяся тем, что двигатели оснащены нормальноблокированным электромагнитным тормозом, выполненным с возможностью срабатывания под действием пружины при отсутствии электричества.
6. Подъемно-транспортная система по п. 1, отличающаяся тем, что платформа имеет устройство контроля и ограничения скорости.
7. Подъемно-транспортная система по п. 1, отличающаяся тем, что платформы имеют систему контроля сближения с выше- или нижерасположенной платформой при движении вверх или вниз, выполненную с возможностью работы в двух режимах, первый из которых обеспечивает предотвращение двойной нагрузки на направляющие и обеспечивает расстояние между платформами, гарантирующее передачу нагрузки на направляющую только от одной платформы, и второй режим, который обеспечивает исключение столкновения платформ при движении вверх или вниз, при этом каретки включают в себя датчики измерения нагрузки на направляющие и датчики расстояния между платформами.
| ПОДЪЕМНАЯ СИСТЕМА ДЛЯ ОБСЛУЖИВАНИЯ МНОГОЭТАЖНЫХ СООРУЖЕНИЙ | 2005 |
|
RU2349532C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| KR 20110067776 A1, 22.06.2011 | |||
| US 3592294 А,13.07.1971 | |||
| DE 29621330 U1, 09.04.1998 | |||
| Пневматический функциональный блок | 1959 |
|
SU134917A1 |

