Настоящее изобретение относится к способу контроля, по меньшей мере, одной порожней бутылки с распознаванием позиции признака, расположенного на поверхности порожней бутылки. Далее, изобретение относится к соответствующему устройству или соответствующему устройству контроля порожней бутылки.
В рамках настоящего описания порожняя бутылка должна представлять в целом емкость любого типа, которая может быть заполнена сыпучим материалом, однако при проводимых контролях еще не заполнена сыпучим материалом. Такого рода емкости могут использоваться, например, в качестве бутылок для жидкостей, например напитков. Емкости, например бутылки, могут быть выполнены из прозрачного или просвечивающего материала, например, из стекла или просвечивающего полимерного материала, например, ПЭТ (полиэтиленгликольтерефталат). Возможно также изготовление емкостей из других материалов и их заполнение другими загружаемыми материалами. Перед заполнением такого рода емкостей и перед их прохождением через этикетировочную машину или после прохождения ими таких этикетировочных машин, эти емкости тщательно контролируются с помощью соответствующих устройств контроля. Например, предусмотрен контроль на предмет выявления посторонних веществ, в ходе которого емкости контролируются на предмет наличия внутри них нежелательных посторонних веществ.
Как правило, емкости, например порожние бутылки, с целью их маркировки или подлежащего загрузке в них загружаемого материала, содержат на одной поверхности характерные признаки, например, выдавленный рельеф или выдавленное углубление или определенные этикетки. Для обеспечения того, чтобы при проведении контроля емкостей, в частности порожних бутылок, эти находящиеся на поверхности признаки не детектировались в качестве ошибок, то есть в качестве мнимо присутствующих загрязнений, в этом случае необходимо принять соответствующие меры для того, чтобы вопреки присутствующим этикеткам или выдавленным рельефам обеспечить возможность надежного контроля порожних бутылок в отношении фактических дефектов или присутствующих загрязняющих частиц.
Исходя из изложенного выше, задача настоящего изобретения состоит в создании способа и соответствующего устройства контроля, по меньшей мере, одной емкости или, по меньшей мере, одной порожней бутылки, посредством которых обеспечивается надежное и безопасное проведение контроля без чрезмерного количества детектирования ошибок. Это означает, что необходимо проводить проверки такого рода порожних бутылок эффективно, но с минимальной потерей надежности, например, при контроле на просвет.
Для решения этой задачи в соответствии с изобретением предлагается способ контроля, по меньшей мере, одной порожней бутылки с признаками п. 1, а также устройство контроля, по меньшей мере, одной порожней бутылки с признаками п. 12 формулы изобретения.
В соответствии с изобретением предлагается способ контроля, по меньшей мере, одной порожней бутылки с распознаванием позиции признака, расположенного на поверхности порожней бутылки. При этом перед контролем порожняя бутылка проходит через распознающий модуль, в котором производят оптическое и/или осуществляемое с помощью датчиков считывание заданной позиции подлежащего распознаванию признака с целью распознавания фактической позиции признака и определения и предоставления фактической позиции.
Такой признак, как выдавленный рельеф, декоративный шов или производственный шов, детектируется, как правило, с помощью метода отраженного света, который вследствие незначительной интенсивности света и/или целенаправленного отражения на поверхности емкости позволяет распознавать конкретные структуры и/или формы.
Затем при последующем первом контроле для определенной позиции признака вырабатывают маску, так что при проведении первого контроля в области маски распознавание ошибки не производится. Этот контроль на предмет выявления ошибки производят, как правило, методом проходящего света с целью обнаружения веществ, ошибок и нарушений в стенках или внутри емкости. При этом по сравнению с контролем, проводимым методом отраженного света, выбирают соответствующую интенсивность освещения со значительно более высокой яркостью, при которой названный ранее признак, например выдавленный рельеф, был бы, например, пропущен, то есть не был бы распознан в качестве дискретной структуры или по своему точному положению и растяжению.
После проведения первого контроля порожнюю бутылку поворачивают на заранее заданный угол, причем позицию признака рассчитывают совместно со смещением, выработанным посредством поворота, и подготавливают в качестве новой позиции для осуществления второго контроля. При втором контроле для подготовленной новой позиции признака генерируют вторую маску, так что при осуществлении второго контроля в области второй маски распознавание ошибки не происходит, причем признак находится вне области второй маски, только при неточном повороте порожней бутылки и, следовательно, распознается в качестве ошибки. При распознавании ошибки порожнюю бутылку выводят после этого из соответствующей системы и по мере необходимости подвергают более тщательной проверке или повторному контролю.
В возможном исполнении соответствующего изобретению способа заранее выбранный угол выбирается около 90°.
В следующем исполнении соответствующего изобретению способа заранее заданную позицию подлежащего распознаванию признака считывают оптически и/или с помощью датчиков с 360°-покрытием с целью распознавания фактической позиции признака. С этой целью в предусмотренном модуле распознавания располагают, например, четыре камеры, соответственно расположенные относительно друг друга под углом 90° и тем самым могут производить считывание полного окружного периметра порожней бутылки, проходящей через распознающий модуль. Понятие камеры в данном случае не должно быть ограничивающим. Более того, понятие камеры охватывает все пригодные устройства записи поверхности или контрольной записи. Далее, в распознающем модуле для считывания порожней бутылки с помощью предусмотренных камер имеются устройства освещения, конструкция и тип которых определяются, предпочтительно, в зависимости от типа признака.
В рамках настоящего изобретения понятие позиции охватывает угловую позицию, а также позицию по высоте признака относительно системы, через которую проходит порожняя бутылка. Прохождение порожней бутылки через распознающий модуль и далее через систему контроля обеспечивают, как правило, с помощью т.н. ленточных транспортеров или транспортеров в виде ленты. После прохождения распознающего модуля проверяемая порожняя бутылка подводится к входу устройства контроля порожних бутылок для контроля боковых стенок. После этого в устройстве контроля порожних бутылок для определенной позиции признака составляют маску в соответствующей области контроля соответствующего контроля боковых стенок, так что в области маски не происходит распознавание ошибки, например, на предмет загрязнения. После проведения контроля боковых стенок на входе устройства порожних бутылок порожнюю бутылку в ходе прохождения поворачивают с помощью ременного привода, по возможности, как уже упоминалось, точно на 90°. Затем рассчитывают позицию признака на основании выработанного поворотом смещения и передают в качестве новой позиции признака в качестве величины ввода на устройство контроля стенок на выходе устройства контроля порожних бутылок. На основании этой переданной новой позиции вновь вырабатывают маску, так что также в области выхода устройства контроля порожних бутылок при контроле боковых стенок в области маски распознавание ошибки не производится. Если, конечно, поворот бутылки осуществляется недостаточно точно, то, несмотря на маскирование, признак расположен вне зоны маски и в соответствии с этим распознается как ошибка боковой стенки.
Как уже упоминалось, согласно одной форме исполнения соответствующего изобретению способа первый контроль соответствует контролю боковых стенок на входе устройства контроля порожних бутылок, а второй контроль соответствует контролю боковых стенок на выходе устройства контроля порожних бутылок. Как уже упоминалось, также возможен поворот порожней бутылки при прохождении порожней бутылкой ременного привода устройства контроля порожних бутылок.
В следующем исполнении соответствующего изобретению способа, после поворота порожней бутылки на заранее заданный угол, например, на 90°, бутылка перед вторым контролем проходит через второй распознающий модуль, в котором производят оптическое и/или осуществляемое с помощью датчиков считывание новой позиции подлежащего распознаванию признака, предпочтительно с 360°-покрытием, с целью распознавания фактической новой позиции признака и производят определение и предоставление фактической новой позиции.
После этого при последующем втором контроле для определенной фактической новой позиции признака вырабатывается маска, так что при приведении второго контроля в области маски распознавание ошибки не производится. За счет этого предотвращается распознавание ошибки из-за ошибочного маскирования признака вследствие ошибочного поворота, так как после поворота производят повторное распознавание фактической новой позиции. В случае ошибочного поворота бутылки эта ошибка может быть в известной степени компенсирована вторым распознающим модулем или может быть компенсировано проведенное в нем распознавание фактической новой позиции. В результате этого не происходит отвод или отводится, по меньшей мере, малое количество бутылок, которые хотя и не содержат загрязнений, однако вследствие ошибочного маскирования признака при втором контроле детектируются как ошибочные. За счет этой формы исполнения соответствующего изобретению способа можно дополнительно повысить надежность при контроле бутылки проходящим светом.
В следующей форме исполнения соответствующего изобретению способа определенная фактическая позиция перед первым контролем и определенная фактическая новая позиция перед вторым контролем взаимно рассчитываются, и на основании этого определяется фактический угол поворота. В результате этого обеспечивается возможность контроля и повторной соответствующей юстировки поворота или осуществляющего поворот блока. Если это не представляется возможным, то во всех случаях ни одна бутылка не будет отведена вследствие этого ошибочного поворота.
В следующей форме исполнения соответствующего изобретению способа определенный фактический угол поворота используют для контроля угла поворота и сравнивают его с заранее заданным углом поворота и его допусками, причем выходящее за пределы допусков отклонение распознается как ошибка, в результате которой необходимо произвести замену осуществляющего поворот блока или, по меньшей мере, произвести его новую юстировку.
В соответствии со следующей формой исполнения соответствующего изобретению способа в распознающем модуле предусмотрены различные устройства освещения, выбираемые в зависимости от типа подлежащего распознавания признака.
Настоящее изобретение относится, далее, к устройству контроля ошибок, называемому в последующем устройством контроля, по меньшей мере, одной порожней бутылки с распознаванием позиции признака, расположенного на поверхности порожней бутылки. Соответствующее изобретению устройство содержит, по меньшей мере, один распознающий модуль, выполненный для оптического и/или проводимого с помощью датчиков заранее заданной позиции подлежащего распознаванию признака с целью распознавания фактической позиции признака и определения и предоставления фактической позиции. Далее, соответствующее изобретению устройство содержит первый блок контроля, который выполнен для выработки маски на основании определенной позиции признака и выполнения дальнейшего контроля, причем при проведении контроля в области маски распознавание ошибки не производится.
При этом под этим следует понимать, что обработка данных для определения растяжения и позиции признака, а также динамического согласования маски может производиться также в одном или нескольких блоках управления и решающих блоках, которые не обязательно должны являться частью устройства контроля.
Далее, настоящее соответствующее изобретению устройство содержит поворотный модуль, предназначенный для поворота порожней бутылки после первого контроля на определенный угол и для расчета позиции признака на основании выработанного поворотом смещения и предоставления ее в качестве новой позиции для выполнения второго контроля, причем в области второй маски аналогичным образом распознавание ошибки не производится. Это устройство известным образом функционально соединено с модулем отделения, который отделяет из потока загрязненные или поврежденные емкости.
Одна форма исполнения соответствующего изобретению устройства содержит, далее, один или несколько других распознающих модулей, расположенных после первого устройства контроля и после поворотного модуля и выполненных для оптического и/или осуществляемого с использованием датчиков считывания новой позиции подлежащего распознаванию признака для распознавания фактической новой позиции признака с целью определения фактической новой позиции и передачи на второе устройство контроля, так что при последующем втором контроле для определенной фактической новой позиции признака со стороны второго устройства контроля вырабатывается маска, причем при проведении второго контроля в области маски распознавание ошибки не производится.
Поверхностное или пространственное растяжение признака зависит от процесса поворота и транспортировки емкости, так что важной для контролирующей камеры является лишь теневая поверхность признака. За счет этого может быть также определена и исключена в последующем посредством маскирования дискретная составляющая признака, находящаяся на обратной стороне емкости, однако при контроле проходящим светом была бы все же распознана как ошибка. При этом под обратной стороной следует понимать поверхность или сторону емкости, расположенную в направлении от камеры или элемента датчика.
По этой причине с помощью блока управления вырабатывают и передают далее данные о поверхностном и/или пространственном растяжении признака или нескольких признаков с целью динамического согласования положения, а также поверхностного и/или пространственного растяжения соответствующих масок.
Так, с помощью управляющего и вычислительного блока обеспечивается, что из контроля всегда исключают лишь по возможности малую область емкости.
При этом маска в идеальном случае имеет такие размеры, что она соответствует поверхности маркировки или выступает за границы маркировки лишь на величину поверхности, которая соответствует разрешающей способности датчиков, в особенности, камеры.
Как в первом, так и во втором распознающих модулях могут быть предусмотрены различные устройства освещения, которые следует выбирать в зависимости от типа подлежащего распознаванию признака. Далее, представляется возможным, что как в первом, так и во втором распознающих модулях под углом 90° относительно друг друга расположены соответственно четыре камеры, в результате чего при считывании порожней бутылки может быть реализован 360°-охват. Как уже упоминалось выше, понятие камеры не должно быть в данном случае ограничивающим, а должно, более того, охватывать все пригодные устройства записи изображения и контрольные устройства записи. Как первый, так и второй блоки контроля соответственно содержат соответствующие средства освещения и устройства записи изображения или системы датчиков с целью обеспечения возможности проведения соответствующего контроля, в частности контроля боковых стенок проходящих через них порожних бутылок. Между двумя блоками контроля предусмотрен, как правило, ременный привод для поворота бутылок, через который на пути от первого блока контроля ко второму блоку контроля проходит соответствующая бутылка, причем известны также и другие системы, например, системы фиксации и поворота емкости за горловину.
Соответствующее изобретению устройство пригодно, в частности, для осуществления соответствующего изобретению способа в соответствии с описанным выше.
Дальнейшие преимущества и исполнения изобретения вытекают из описания и приложенных чертежей.
Само собой разумеется, что названные выше и подлежащие пояснению в последующем признаки могут использоваться не только в соответственно указанной комбинации, но и в других комбинациях или по отдельности, без выхода за рамки настоящего изобретения.
Фиг. 1 показывает в схематическом представлении вид сверху на одну первую форму исполнения соответствующего изобретению устройства для контроля, по меньшей мере, одной порожней бутылки.
Фиг. 2 показывает в схематическом представлении вид сверху на одну форму исполнения распознающего модуля, который предусмотрен в изображенной на фиг. 1 форме исполнения соответствующего изобретению устройства.
Фиг. 3 показывает в качестве примера в схематическом представлении порожнюю бутылку с маской, правильно позиционированной относительно признака.
Фиг. 4 показывает в отличие от этого в схематическом виде порожнюю бутылку с маской, неправильно позиционированной относительно признака.
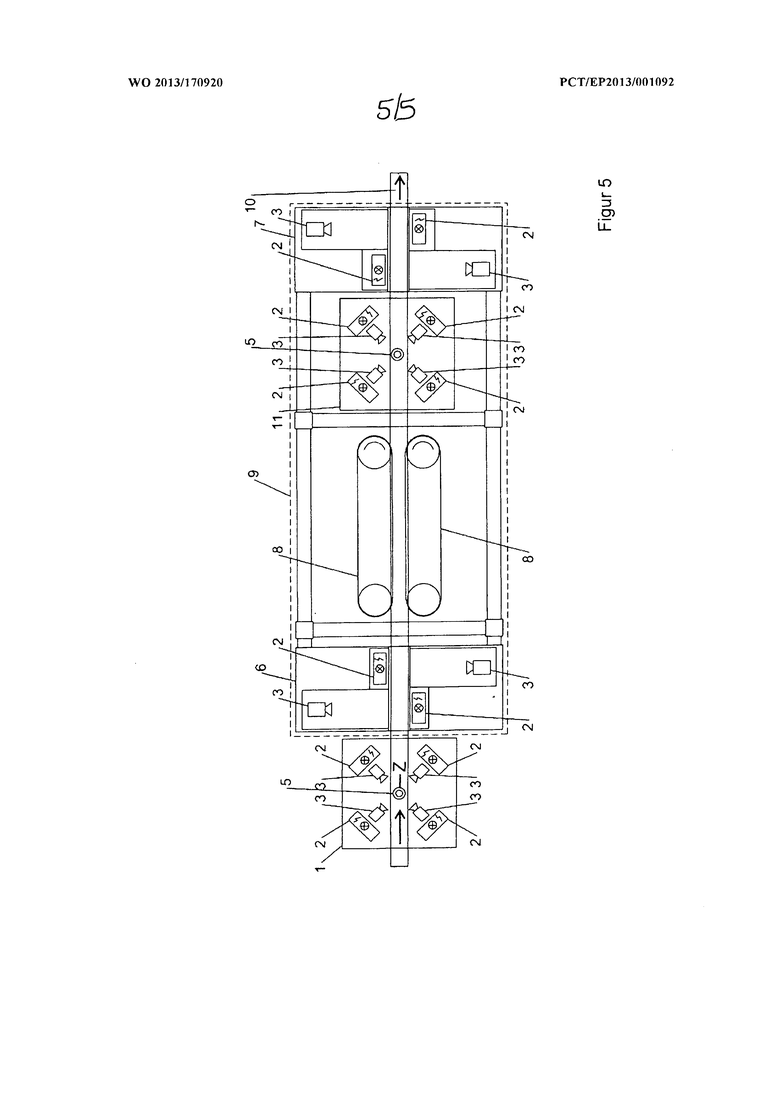
Фиг. 5 показывает в схематическом представлении вид сверху на одну вторую форму исполнения соответствующего изобретению устройства с одним первым и одним вторым распознающими модулями.
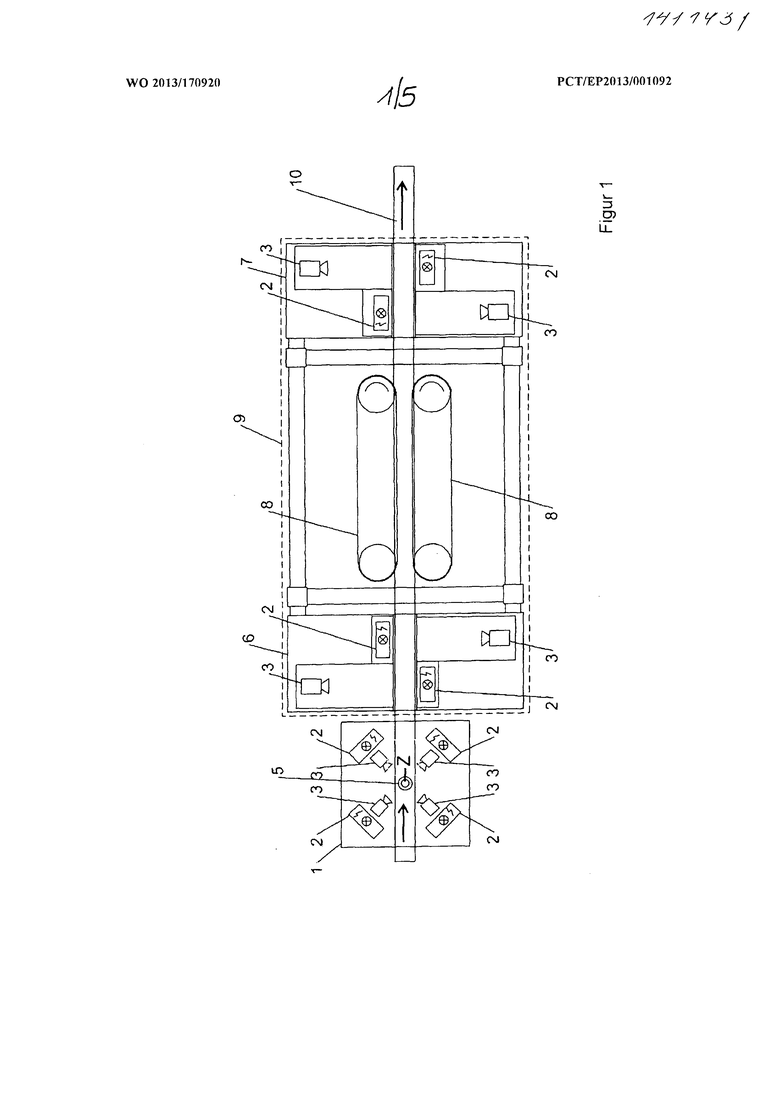
Фиг. 1 показывает вид сверху на соответствующее изобретению устройство для контроля, по меньшей мере, одной порожней бутылки с распознаванием позиции признака, расположенного на поверхности порожней бутылки. Изображенное в данном случае устройство содержит один первый распознающий модуль 1, за которым следует устройство 9 контроля порожних бутылок. Подлежащая контролю порожняя бутылка проходит в направлении 10 движения сначала через первый распознающий модуль 1 и затем через устройство 9 контроля порожних бутылок. В изображенной в данном случае форме первый распознающий модуль 1 содержит четыре осветительных устройства 2, а также четыре блока записи изображения или системы 3 датчиков. Осветительные устройства 2 расположены соответственно за соответствующими блоками 3 записи изображения, так что соответствующее осветительное средство 2 и соответствующий блок 3 записи изображения расположены на одной линии соответственно вытекающие из этого четыре линии четырех осветительных средств 2 и соответствующих четырех блоков 3 записи изображения пересекаются в центре Z. В данном случае осветительные средства 2, а также блоки 3 записи изображения расположены относительно друг друга под углом 90°. Если в центре или в точке Z пересечения упомянутых линий находится, по меньшей мере, одна порожняя бутылка 5, то в этом случае находящаяся здесь бутылка 5 может быть точно исследована или считана с помощью осветительных устройств 2 и блоков 3 записи изображений, так что можно распознать и тем самым определить и предоставить фактическую позицию признака. Распознавание фактической позиции признака осуществляют в данном случае в заранее заданной области поверхности полой бутылки, в которой в соответствии с областью определения расположен признак. В этой специальной форме исполнения это означает, что считывание бутылки осветительными устройствами 2 и блоками 3 записи изображения не производят на протяжении всей высоты, а область, считывание которой производят, уже ограничена в предшествующем поле заранее заданной позицией подлежащего распознаванию признака.
Если теперь фактическая позиция признака распознана и, следовательно, определена, то эта фактическая определенная позиция передается далее на вход 6 последующего устройства 9 контроля порожних бутылок. Известный для этого управляющий и вычислительный блок не изображен, однако может быть предусмотрен в качестве центрального управляющего и вычислительного блока или может быть, например, децентрализовано встроен в блоки контроля.
Вход 6 устройства 9 контроля порожних бутылок в данном случае соответствует первому блоку контроля и содержит здесь модули контроля боковых стенок для проведения контроля боковой стенки бутылки или емкости, проходящей через вход 6 устройства 9 контроля порожних бутылок. В изображенной в данном случае форме здесь предусмотрены сначала также один блок 3 записи изображения, а также следующее за ним осветительное устройство 2, причем блок 3 записи изображения и осветительное устройство 2 расположены соответственно друг против друга или проходящая через вход 6 бутылка проходит точно между осветительным устройством 2 и блоком 3 записи изображения. В представленной здесь форме исполнения конструкции блока 3 записи изображения и осветительного устройства 2 выполнены с дублированием с расположением одна за другой. На основании определенной фактической позиции признака во входе 6 устройства 9 контроля порожних бутылок вырабатывается маска, так что при проведении первого контроля с целью распознавания ошибок или загрязнений в области маски распознавание ошибки не производится. Это означает, что сам признак удаляется из процедуры распознавания ошибки, так что предотвращается возможность восприятия ожидаемого признака на поверхности порожней бутылки, например, как загрязнение.
С помощью управляющего и вычислительного блока данные о зависимом от процесса поворота и транспортировки емкости пространственном растяжении одного или нескольких признаков используют для динамического согласования положения, а также плоскостного и/или пространственного растяжения соответствующих масок. С помощью управляющего и вычислительного блока в последующем обеспечивается исключение из процесса контроля всегда по возможности малой области.
При этом размеры маски в идеальном случае выбирают таким образом, чтобы она выступала за пределы маркировки лишь на величину поверхности, которая соответствует разрешающей способности датчиков, в особенности, камеры.
После проведения первого контроля порожняя бутылка поворачивается на заданный угол с помощью ременного привода 8 устройства 9 контроля порожних бутылок. При этом речь идет, как правило, об угле 90°. После выполнения поворота бутылка 5 поступает на выход 7 устройства 9 контроля порожних бутылок. Выход 7 выполнен соответствующим входу 6 лишь зеркально к нему и соответствует в данном случае второму блоку контроля. Также и здесь бутылка проходит, по меньшей мере, однократно, как правило, два раза, через комбинацию осветительного устройства 2 и блока 3 записи изображения. Причем и в этом случае осветительные устройства 2 и блоки 3 записи изображения расположены с точечной симметрией относительно расположенной на ленте транспортера центральной точки. Фактически определенную позицию признака рассчитывают с выработанным за счет поворота смещением и передают в качестве новой позиции и растяжения признака на секцию контроля боковых стенок в выходе 7 устройства 9 контроля порожних бутылок в качестве величины ввода. Секции контроля боковых стенок в выходе 7 определяют, таким образом, для бутылки позицию признака и действуют аналогично модулям контроля боковых стенок во входе 6 относительно маскирования и согласования распознавания ошибки.
Распознанные как дефектные емкости известным образом отводятся вниз по потоку.
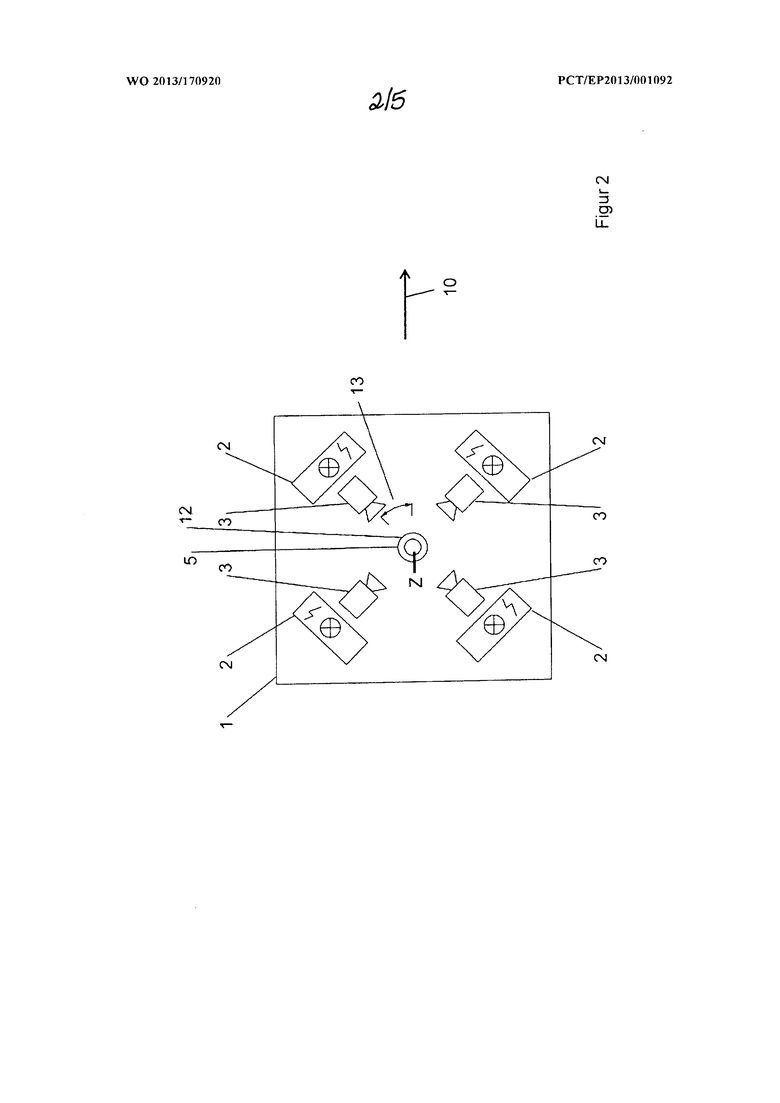
Фиг. 2 показывает вид сверху на распознающий модуль 1, как он предусмотрен в форме исполнения по фиг. 1. Изображены четыре блока 3 записи изображения и четыре соответствующих блокам 3 записи изображения осветительных устройства 2. Относительно центральной точки Z осветительные устройства 2 расположены соответственно за блоками 3 записи изображения и расположены с соответствующими им блоками 3 записи изображения на одной линии, причем образующиеся из этого четыре линии пересекаются точно в центральной точке Z. Если теперь локализация бутылки 5 производится точно в этой центральной точке Z, то обеспечивается наилучшая возможность считывания бутылки 5 осветительными устройствами и блоками записи изображения. В показанном здесь случае осветительные устройства 2 и соответствующие им блоки 3 записи изображения расположены относительно друг друга соответственно под углом 90°. За счет этого можно оптимально реализовать 360°-считывание заранее заданной области на поверхности порожней бутылки 5, проходящей через распознающий модуль. К тому же осветительные устройства 2, а также блоки 3 записи изображения расположены относительно направления 10 прохождения под углом 13, составляющим около 45°. Освещение или осветительные устройства 2 можно выбирать в зависимости от типа подлежащего распознаванию признака на поверхности проходящей через распознающий модуль пустой бутылки. Также можно выбирать позицию осветительных устройств 2 в соответствии с типом признака на поверхности бутылки, проходящей через распознающий модуль.
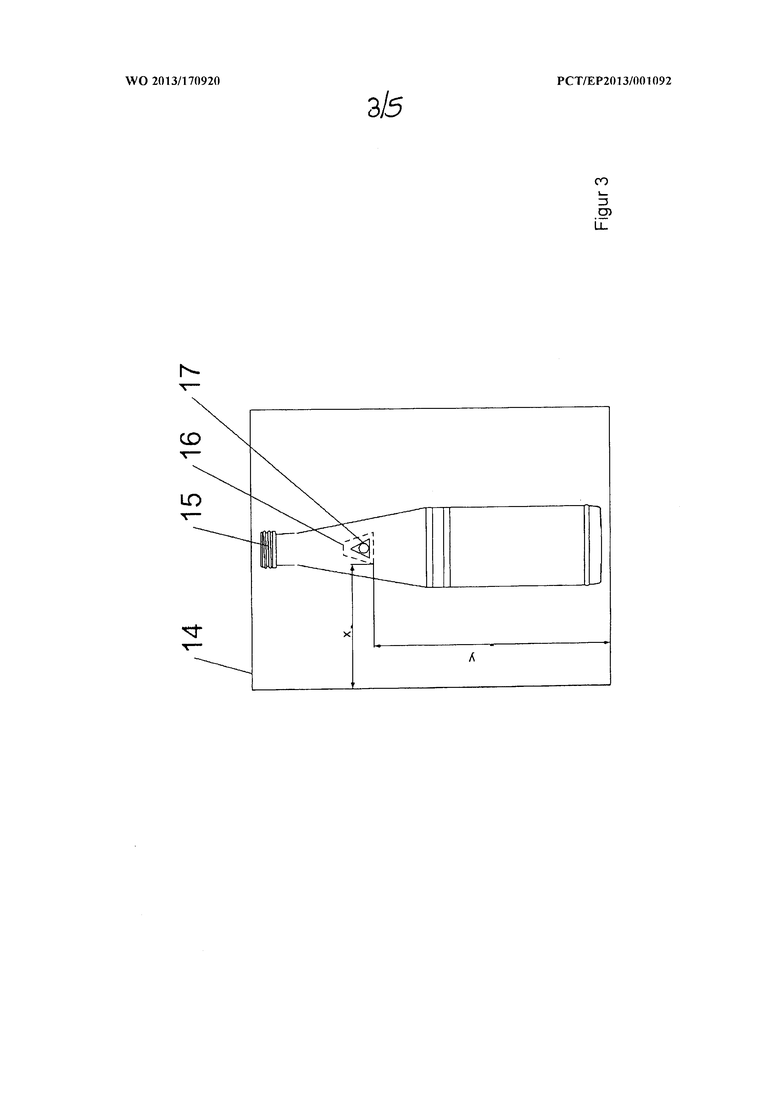
Фиг. 3 показывает пример снимка бутылки с маской, позиционированной правильно относительно признака. Снимок 14 показывает бутылку 15 с объектом или признаком 17 и выработанной маской 16 для проведения контроля. Объект 17 или признак 17 представляет собой признак на поверхности бутылки 15, который должен быть распознан и оснащен маской 16 в зоне перед контролем с целью предотвращения возможности интерпретации признака 17 при контроле в качестве ошибки.
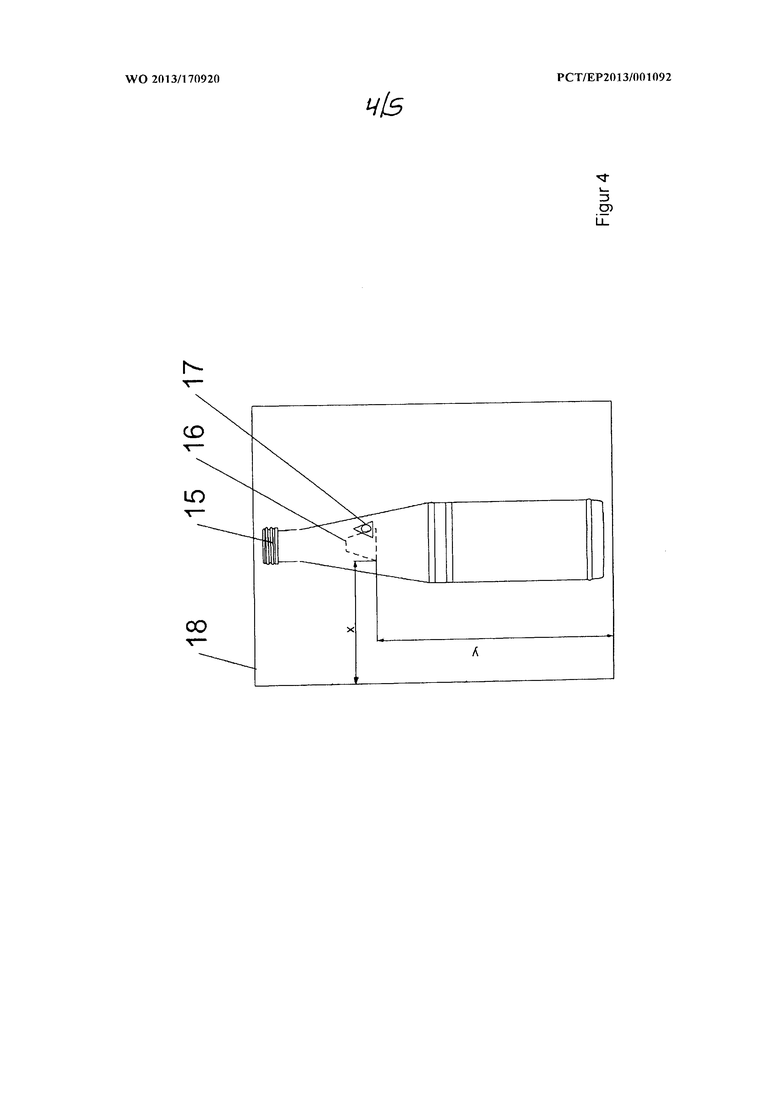
В отличие от этого фиг. 4 показывает пример снимка 18 бутылки 15 с признаком 17, причем в данном случае маска, которая в области перед контролем должна быть репродуцирована на признак 17, позиционирована неправильно, что может быть следствием ошибочного поворота бутылки перед проведением второго контроля. Позиция признака 17 показана как на фиг. 3, так и на фиг. 4 координатами x и y. При этом координата y указывает регулировку по высоте, а x - описывает угловое положение признака 17 на соответствующем периметре бутылки 15.
Фиг. 5 показывает в схематическом представлении вид сверху на вторую форму исполнения соответствующего изобретению устройства для осуществления контроля, по меньшей мере, одной порожней бутылки. В отличие от формы исполнения по фиг. 1 изображенная здесь форма исполнения содержит второй распознающий модуль 11, который расположен перед второй секцией контроля на выходе 7 устройства 9 контроля порожних бутылок. Это означает, что бутылка 5, которая проходит в направлении 10 движения соответствующее изобретению устройство проходит сначала через первый распознающий модуль 1, затем через вход 6 устройства 9 контроля порожних бутылок, затем через ременный привод 8, после чего через второй распознающий модуль и в последнюю очередь через выход 7 устройства 9 контроля порожних бутылок. Второй распознающий модуль 11 имеет конструкцию, аналогичную конструкции первого распознающего модуля 1, и обеспечивает, что после прохождения порожней бутылки 5 через ременный привод 8 и соответствующего поворота порожней бутылки 5 ременным приводом 8 позиция признака не просто рассчитывается на основании выполненного поворота и с учетом соответствующего смещения и на основании этого для второго контроля на выходе 7 определяют новую позицию, но и, более того, новую позицию признака вновь определяют перед осуществлением второго контроля на выходе 7. Определение новой позиции признака производят аналогично определению фактической позиции признака в первом распознающем модуле. Определенную на основании этого угловую позицию и позицию признака по высоте передают на последующие секции контроля боковых стенок в выходе 7 устройства 9 контроля порожних бутылок. Эти системы контроля устанавливают для определенной новой позиции признака маску, то есть вторую маску в соответствующей области контроля соответствующей секции контроля стенок, так что в области второй маски так же, как и до этого в области первой маски при прохождении первого контроля, не производится распознавание ошибки на предмет выявления загрязнения. Если поворот бутылки ременным приводом 8 был произведен недостаточно точно, то, несмотря на это, признак маскируется в правильной позиции вторым распознающим модулем 11.
Принцип определения растяжения признака на емкости или бутылке, дальнейшая передача данных и зависимое от этого динамическое согласование положения, а также плоскостного или пространственного растяжения одной или нескольких масок являются одинаковыми для всех описанных случаев исполнения.
В зависимости от задачи контроля, конечно, может быть целесообразным и достаточным задействование только одного устройства контроля или проведение одного этапа контроля с названным выше динамическим маскированием.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНСПЕКЦИЯ ПУСТЫХ БУТЫЛОК | 2012 |
|
RU2552122C1 |
| СИСТЕМА СБОРА ИНФОРМАЦИИ ДЛЯ ФИКСАЦИИ БУТЫЛОК И ПРИМЕНЕНИЕ СИСТЕМЫ СБОРА ИНФОРМАЦИИ (ВАРИАНТЫ) | 2009 |
|
RU2498931C2 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО С ИНВЕРСНОЙ ПЛЕНОЧНОЙ ЛИНЗОЙ | 2015 |
|
RU2649612C2 |
| СВЕТОПРОНИЦАЕМЫЙ ПАТРОН | 2010 |
|
RU2520040C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРИ КОНТРОЛИРОВАНИИ ПОСТОРОННИХ ВЕЩЕСТВ | 2011 |
|
RU2529585C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТСЛЕЖИВАНИЯ ДЕФЕКТОВ ПОЛОСОВЫХ МАТЕРИАЛОВ | 2014 |
|
RU2631895C2 |
| СПОСОБ КОНТРОЛЯ, РЕГУЛИРОВКИ И ОПТИМИЗАЦИИ РАЗЛИВОЧНЫХ УСТАНОВОК ДЛЯ ПИЩЕВЫХ ПРОДУКТОВ ВСЕХ ТИПОВ, В ЧАСТНОСТИ, ДЛЯ БУТЫЛОК ДЛЯ НАПИТКОВ | 2008 |
|
RU2432314C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ЕМКОСТЕЙ И ЭТИКЕТИРОВОЧНАЯ МАШИНА С ТАКИМ УСТРОЙСТВОМ | 2006 |
|
RU2412093C2 |
| СПОСОБ ТОЧНО ПОЗИЦИОНИРОВАННОЙ НАКЛЕЙКИ ЭТИКЕТОК И ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2007 |
|
RU2405723C1 |
| СМЕННАЯ СИСТЕМА ПРИВОДА | 2007 |
|
RU2408915C2 |
Изобретение относится к контролю, по меньшей мере, одной порожней емкости, как правило, порожней бутылки (5), с распознаванием позиции признака, расположенного на поверхности порожней емкости. Емкость или бутылка перед контролем проходит через модуль (1) распознавания, в котором оптически и/или с помощью датчиков считывают заранее заданную позицию подлежащего распознаванию признака для распознавания фактической позиции признака и определяют фактическую позицию. При следующем контроле (6) для определенной позиции признака вырабатывается первая маска, так что при проведении первого контроля (6) в области первой маски не производится распознавание ошибки. После проведения первого контроля емкость поворачивают на заранее заданный угол с помощью модуля (8) поворота, причем позицию признака рассчитывают вместе с выработанным поворотом смещением и предоставляют в качестве новой позиции при проведении второго контроля (7), при котором для предоставленной новой позиции признака вырабатывают вторую маску, так что при проведении второго контроля в области второй маски распознавание ошибки не производится. Изобретение обеспечивает повышение надежности контроля. 2 н. и 13 з.п. ф-лы, 5 ил.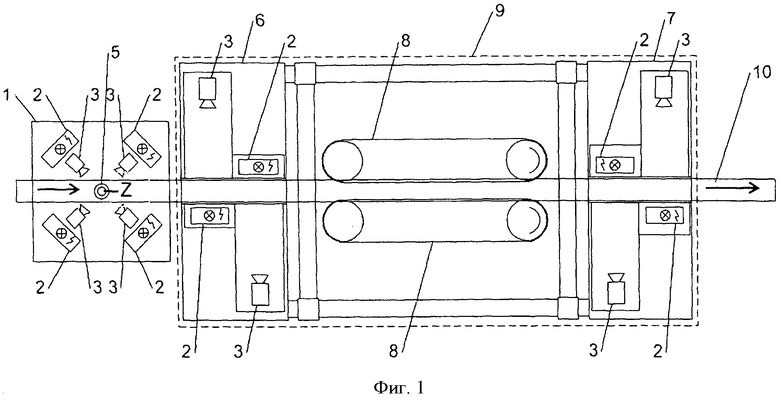
1. Способ контроля для выявления ошибки, по меньшей мере, одной порожней емкости, в частности бутылки из стекла, ПЭТ или иного прозрачного материала, с распознаванием позиции, по меньшей мере, одного расположенного на поверхности порожней емкости признака, такого как, например, выдавленный рельеф, декоративный шов или т.п., при котором емкость перед контролем на предмет выявления ошибки с помощью, по меньшей мере, одного модуля контроля проводят через распознающий модуль, в котором заранее заданную позицию подлежащего распознаванию признака считывают оптически и/или с помощью датчиков с целью распознавания фактической позиции признака и определяют фактическую позицию признака, при последующем первом контроле в, по меньшей мере, одном блоке контроля, для определенной позиции признака вырабатывают первую маску, так что при проведении первого контроля в области первой маски распознавание ошибки не производится, после проведения первого контроля порожнюю емкость поворачивают на заданный угол и производят второй контроль, причем при следующем контроле для предоставленной новой позиции признака вырабатывают вторую маску, так что при проведении второго контроля в области второй маски распознавание ошибки не производится, причем при неточном повороте пустой емкости признак не располагается в области второй маски и распознается как ошибка, причем позиция признака и его плоскостное растяжение рассчитывается вместе с выработанным посредством поворота смещением и служит в качестве новой позиции и растяжения соответствующих масок.
2. Способ по п. 1, при котором заданный угол составляет 90°.
3. Способ по п. 1 или 2, при котором заранее заданную позицию подлежащего распознаванию признака считывают оптически и/или с помощью датчиков с 360°-покрытием с целью распознавания фактической позиции признака.
4. Способ по п. 1 или 2, при котором первый контроль осуществляют как контроль боковых стенок на входе устройства контроля порожних емкостей.
5. Способ по п. 1, при котором второй контроль осуществляют как контроль боковых стенок на выходе устройства контроля порожних емкостей.
6. Способ по п. 1, при котором поворот порожней емкости при прохождении порожней емкости производят с помощью ременного привода устройства контроля порожних емкостей.
7. Способ по любому из пп. 1, 2, 5, 6, при котором после поворота порожней емкости на заранее заданный угол емкость перед вторым контролем проводят через второй распознающий модуль, в котором оптически и/или с помощью датчиков считывают новую позицию подлежащего распознаванию признака с целью распознавания фактической новой позиции признака и определяют фактическую новую позицию признака, при последующем втором контроле для определенной фактической новой позиции признака вырабатывают вторую маску, так что при проведении второго контроля в области второй маски распознавание ошибки не производят.
8. Способ по п. 7, при котором определенную фактическую позицию перед первым контролем и определенную фактическую новую позицию перед вторым контролем взаимно рассчитывают и на основании этого определяют фактический угол поворота.
9. Способ по п. 8, при котором определенный фактический угол поворота используют для контроля угла поворота и сравнивают с заранее заданным углом и его допусками, причем отклонение за пределы допусков распознают как ошибка.
10. Способ по любому из пп. 1, 2, 5, 6, 8, 9, при котором позицию указывают посредством указания угловой позиции и позиции по высоте.
11. Способ по любому из пп. 1, 2, 5, 6, 8, 9, при котором в распознающем модуле предусматривают различные осветительные устройства, которые выбирают в зависимости от типа подлежащего распознаванию признака.
12. Устройство контроля для выявления ошибки, по меньшей мере, одной порожней емкости с распознаванием позиции, по меньшей мере, одного признака, расположенного на поверхности порожней емкости, причем устройство содержит: по меньшей мере, один первый распознающий модуль (1), который выполнен с возможностью при прохождении порожней емкости через распознающий модуль (1) проведения оптического и/или осуществляемого с помощью датчиков считывания заранее заданной позиции подлежащего распознаванию признака с целью распознавания фактической позиции признака, определения фактической позиции и представления ее в виде набора данных, по меньшей мере, один первый блок (6) контроля, выполненный с возможностью перед проведением контроля порожней емкости вырабатывать маску для предоставленной позиции признака, так что при проведении контроля в области маски распознавание ошибки не производится, по меньшей мере, один модуль (8) поворота, выполненный с возможностью после выполнения первого контроля поворачивать порожнюю емкость на заранее заданный угол, причем позицию признака рассчитывают с привлечением выработанного поворотом смещения и предоставляют в качестве новой позиции для проведения второго контроля, причем предусмотрен, по меньшей мере, один блок (x) управления для последующей передачи зависимой от движения позиции признака и размерности признака относительно устройства (6) контроля и для соответствующего динамического согласования масок в области контроля.
13. Устройство по п. 12, при котором модуль (8) поворота и первый блок (6) контроля встроены в устройство (9) контроля порожних емкостей.
14. Устройство по п. 12 или 13, которое содержит второй блок (7) контроля, причем первый распознающий модуль (1), первый блок (6) контроля, модуль (8) поворота и второй блок (7) контроля расположены последовательно в ряд, так что первый контроль проводят в первом блоке (6) контроля, а второй контроль - во втором блоке (7) контроля.
15. Устройство по п. 14, содержащее второй распознающий модуль (11), который расположен между модулем (8) поворота и вторым блоком (7) контроля.
| DE 3611536 A1, 15.10.1987 | |||
| ОПТОЭЛЕКТРИЧЕСКАЯ РЕГИСТРИРУЮЩАЯ СИСТЕМА | 2008 |
|
RU2425360C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ ПОЛУЧЕНИЯ ВОЛОКНИСТОГО ТРИАЦЕТАТАЦЕЛЛЮЛОЗЫ | 0 |
|
SU186278A1 |
| US 4655349 A, 07.04.1987 | |||
| US 5729340 A, 17.03.1998 | |||
| US 4280624 A, 28.07.1981 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧИСТОТЫ ПУСТЫХ ПРОЗРАЧНЫХ СОСУДОВ | 1991 |
|
RU2017142C1 |
| МАТОЧНИК ВОЗДУХА ОКИСЛИТЕЛЬНОЙ КОЛОННЫ ПРОИЗВОДСТВА БИТУМОВ | 1998 |
|
RU2157824C2 |

