В технических установках часто стоит задача, состоящая в том, что находящийся в состоянии покоя объект в установке должен быть захвачен средством транспортировки. Для этого объект имеет одну или, как правило, несколько точек захвата, в которых средство транспортировки захватывает объект. В частности, если этот захват должен происходить автоматически, должно определяться точное пространственное положение точки захвата.
Ниже в качестве примера установки приведена установка EAF (электродуговая печь). Объектом тогда является скрапоразгрузочная корзина, заполняемая подлежащим расплавлению стальным скрапом, которая находится, например, на механизме перемещения скрапа, таком как рельсовое транспортное средство, или любой другой передаточный пункт. Транспортное средство представляет собой загрузочный кран. Точками захвата тогда являются транспортировочные цапфы на скрапоразгрузочной корзине, которые загрузочный кран захватывает соответствующими транспортировочными крюками в качестве средства захвата, чтобы поднять скрапоразгрузочную корзину и транспортировать ее.
Захват скрапоразгрузочной корзины с механизма перемещения скрапа или другой передаточной точки посредством загрузочного крана представляет собой стадию процесса загрузки. Известно выполнение этого процесса крановщиком вручную без автоматизации и применения измерительной техники. Это делается с помощью дистанционного управления, то есть посредством пульта дистанционного управления от основания установки или панели управления диспетчерской печи или мобильным образом из кабины крана. При этом операция всегда осуществляется в поле зрения крановщика, например, путем прямого визуального контроля или с помощью камеры посредством наблюдения видеоизображения в реальном времени. Определение местоположения скрапоразгрузочной корзины или ее точек захвата здесь не требуется.
Желательной была бы автоматическая загрузка скрапа в электродуговую печь. При этом, в числе прочего, рассматривается автоматизированный захват скрапоразгрузочной корзины посредством загрузочного крана, автоматическая транспортировка скрапоразгрузочной корзины посредством загрузочного крана к электродуговой печи, автоматическая загрузка в корпус печи и автоматизированная обратная транспортировка скрапоразгрузочной корзины к механизму перемещения скрапа или другой передаточной точке. Настоящее изобретение относится только к частичной задаче этой области, а именно к определению фактического пространственного положения точки захвата скрапоразгрузочной корзины. Определенное пространственное положение может затем, например, подаваться в систему управления загрузочного крана, который затем может автоматически переместиться в соответствующее положение, чтобы выполнить точный захват скрапоразгрузочной корзины.
Эта задача могла бы быть решена, например, с помощью 3D лазерного сканирования или контроля камерой в реальном времени установки или комбинацией обоих способов. Такая система должны была бы устанавливаться в установке, чтобы определить, например, в связанной с установкой системе координат фактическое положение точки захвата. Для этого необходимы связанные с затратами аппаратные средства и измерения (3D лазерные сканеры) или связанная с затратами обработка изображений с использованием дорогостоящих специализированных аппаратных средств (оценка изображения с камеры). Поэтому такое решение было бы сложным и дорогостоящим.
EP 1519372 A2 раскрывает систему и способ для позиционирования робота.
DE 212009000055 U1 описывает устройство для улучшения устройств манипулирования, таких как многоосные промышленные роботы.
DE 3302177 A1 раскрывает способ и устройство для автоматического манипулирования или обработки или для автоматической сборки изделий.
Изобретение исходит из следующих предпосылок: в момент или по меньшей мере незадолго до момента времени захвата объекта средством транспортировки объект находится в состоянии покоя в установке. В установке для объекта задается заданное положение. Например, направляемый по рельсам механизм перемещения скрапа, несущий скрапоразгрузочную корзину, расположен у упорного буфера рельсовой системы, установленного стационарно в известном положении. Геометрия механизма перемещения скрапа и скрапоразгрузочной корзины известна, и, следовательно, известно положение точек захвата. Если бы объект находился точно в заданном положении, то также пространственное положение точек захвата в системе было бы непосредственно известно. Однако из-за различных обстоятельств на практике объект находится не точно в заданном положении, а в другом положении в пределах поля допуска (допустимом положении), отклоняющемся от него в известных пределах. Например, скрапоразгрузочная корзина поднята на несколько сантиметров из-за лежащего внизу скрапа, и механизм перемещения скрапа сдвинут на несколько сантиметров по рельсам. Это фактическое допустимое положение должно быть определено здесь как можно более точно.
Задачей настоящего изобретения является создание усовершенствованного способа и устройства для определения допустимого положения точки захвата объекта.
Эта задача решается в отношении способа посредством способа согласно п. 1 формулы изобретения для определения допустимого положения точки захвата объекта. Объект располагается в установке и в точке захвата захватывается средством транспортировки. Для допустимого положения известно заданное положение. Как правило, допустимое положение отклоняется от заданного положения.
В соответствии с изобретением на объекте прикреплена идентификационная метка. Относительное положение идентификационной метки по отношению к точке захвата и, как правило, также по отношению к самому объекту известно. Затем вычислительное устройство с помощью размещенного в установке устройства определения местоположения определяет пространственное положение идентификационной метки в установке, то есть в связанной с установкой неподвижной системе координат установки. Из определенного пространственного положения и известного относительного положения вычислительное устройство затем определяет допустимое положение, т.е. фактическое пространственное положение точки захвата в установке или в системе координат установки.
Фактическое допустимое положение точки захвата может затем передаваться, например, в систему автоматического управления средства транспортировки, также ориентирующуюся на систему координат установки, тем самым оно может надлежащим образом приближаться к точке захвата и захватывать объект в точке захвата своим средством захвата по возможности точно по положению.
Таким образом, в соответствии с изобретением посредством устройства определения местоположения непосредственно локализуется не сама точка захвата, а идентификационная метка. В отличие от точки захвата, которую трудно локализовать в определенных обстоятельствах, идентификационная метка может быть выполнена любым образом. В частности, устройство определения местоположения и идентификационная метка могут особенно благоприятным образом быть выполнены как система, чтобы определение местоположения сделать особенно точным и простым. Например, цилиндрическую, металлическую, часто грубо загрязненную цапфу захвата скрапоразгрузочной корзины в качестве точки захвата труднее обнаружить посредством устройства определения местоположения, чем четко определенную, чистую и специально созданную для этой цели и согласованную с устройством определения местоположения идентификационную метку. Изобретение обуславливает первоначально кажущиеся дополнительные затраты, а именно за счет дополнительного монтажа или определения местоположения обходным путем через идентификационную метку. Однако за счет существенно более простого и точного определения местоположения идентификационной метки в целом достигается преимущество, потому что, в частности, может быть применено более простое и более экономичное устройство определения местоположения.
Согласно изобретению устройство определения местоположения измеряет по меньшей мере одно одномерное расстояние между собой и идентификационной меткой. Вычислительное устройство определяет затем пространственное положение идентификационной метки на основе по меньшей мере одного одномерного расстояния. Измерение расстояния по сравнению, например, с цифровой обработкой изображения камеры очень легко выполнить. Как правило, достаточны простые арифметические операции согласно закону хода лучей. Таким образом, требуется лишь простое вычислительное устройство сравнительно низкой производительности.
Устройство определения местоположения пользуется измерением расстояния, то есть наряду с измерениями расстояний не выполняется никаких других измерений. При этом осуществляется чисто одномерное измерение расстояния от точки к точке. Таким образом, здесь не выполняется 3D сканирование расстояния.
В чистом измерении расстояния от точки к точке не возникает никаких проблем расстояние, как, например, в случае упомянутого 3D-сканера. Последний имеет угол раскрыва его конуса сканирования и может быть использован только в узких границах расстояний. Объект на удвоенном расстоянии относительно первого объекта может здесь обнаруживаться, как правило, только с трудом. При чистом измерении расстояния измерение множества расстояний без затруднений возможно, как правило, просто и очень точно.
Особенно предпочтительным образом в случае объекта, расположенного на основании (полу) установки, измерение расстояния может, кроме того, осуществляться вдоль направления, параллельного полу установки, то есть, например, как правило, по горизонтали. Измерение расстояния, например, не может быть нарушено, как правило, работающим сверху краном в качестве средства транспортировки. За счет такой близкой к основанию установки устройства определения местоположения и идентификационной метки также возможно упрощение обслуживания системы.
В другой предпочтительной форме выполнения способа применяется идентификационная метка, снабженная контурной характеристикой. Таким образом, идентификационная метка не является плоской, но имеет профиль высоты. Идентификационная метка прикрепляется к объекту таким образом, что контурная характеристика в каждом допустимом положении может регистрироваться устройством определения местоположения в форме различных измеренных расстояний в различных местах идентификационной метки. Таким образом, в частности, при фактически находящемся в заданном положении объекте контурная характеристика ориентирована в направлении измеряемого расстояния. Таким образом достигается то, что разные области идентификационной метки имеют максимальные различия в отношении их соответствующих расстояний до устройства определения местоположения. Измерения расстояний между устройством определения местоположения и различными точками идентификационной метки приводят, таким образом, к различным расстояниям и их наибольшим различиям. Последовательные измерения расстояния до различных мест идентификационной метки дают затем профиль расстояния или высоты в качестве результата измерений, т.е. характеристику расстояния, изменяющуюся по времени и по месту, которая может быть оценена с помощью вычислительного устройства. Пространственное положение идентификационной метки, таким образом, определяется с помощью идентификационной метки, структурированной по высоте по отношению к устройству определения местоположения. Если задана соответствующая ориентация в заданном положении покоящегося объекта, то по меньшей мере одна возможная подобная ориентация также задана в допустимых положениях, так как они, как правило, лишь незначительно отклоняются от заданного положения. Основная ориентация идентификационной метки соответствует, таким образом, заданному положению. Из полученных отклонений, которые можно обнаружить посредством измерений расстояния, может тогда регистрироваться точное допустимое положение.
В другой предпочтительной форме выполнения способа устройство определения местоположения содержит блок регистрации, который служит собственно измерению расстояния и перемещается по отношению к неподвижному объекту. Поэтому блок регистрации также перемещается относительно неподвижной идентификационной метки. Таким образом, устройство определения местоположения определяет зависимый от времени и положения профиль расстояния или профиль высоты при пересечении идентификационной метки. При этом измерение расстояния может всегда осуществляться в том же относительном направлении от блока регистрации. Пересечение идентификационной метки получается тогда исключительно из перемещения блока регистрации. В частности, соответствующий подвижный измеритель расстояния дешевле, чем вышеупомянутый 3D сканер, который измеряет из фиксированной позиции расстояния в разных направлениях.
Устройство определения местоположения содержит, как правило, в дополнение к блоку регистрации несущий его основной каркас, который, в свою очередь, неподвижно установлен на установке. Несмотря на подвижный блок регистрации, устройство определения местоположения находится тогда только в одном единственном месте в установке.
В особенно предпочтительном варианте этой формы выполнения блок регистрации перемещается вдоль прямой линии. Если тогда измерение расстояния, при рассмотрении от блока регистрации, осуществляется всегда в том же самом относительном направлении, например, перпендикулярно к прямой линии, то также точка измерения описывает, в частности, на идентификационной метке линию, лежащую в плоскости направлений измерения.
В предпочтительном варианте этой формы выполнения и, в частности, в случае объекта, расположенного на полу установки, прямая перемещения блока регистрации может тогда, в свою очередь, проходить параллельно полу, то есть, как правило, горизонтально. В особенно предпочтительной форме выполнения способа расстояние измеряется вдоль направления, перпендикулярного к прямой перемещения блока регистрации. Это направление проходит тогда, например, также горизонтально. И здесь справедливы вышеназванные преимущества.
В предпочтительной форме выполнения способа применяется идентификационная метка, которая имеет плоскую основную поверхность с выступающим, как правило, от плоскости структурным элементом, образующим контурную характеристику. Идентификационная метка тогда прикрепляется к объекту таким образом, что при находящемся в заданном положении объекте основная поверхность ориентирована параллельно прямой перемещения блока регистрации. Если блок регистрации затем перемещается вдоль прямой и осуществляет измерение расстояния перпендикулярно прямой, то для мест измерений на основной плоскости идентификационной метки получаются всегда постоянные значения расстояния. В частности, тогда из разных измеренных расстояний в разных местах основой плоскости получается допустимое положение, отклоняющееся от заданного положения, например, поворот идентификационной метки и, тем самым, всего объекта относительно прямой. Это может, таким образом, очень легко определяться.
Что касается устройства, задача настоящего изобретения решается устройством согласно п. 7 формулы изобретения. Оно содержит идентификационную метку, прикрепляемую на объекте в известном относительном положении по отношению к точке захвата, вычислительное устройство, определяющее на основе расположенного в установке устройства определения местоположения пространственное положение идентификационной метки в установке и допустимое положение из пространственного положения и относительного положения. Устройство уже было объяснено вместе с его преимуществами в связи с описанным выше способом. Устройство определения местоположения включает в себя устройство измерения расстояния в качестве, по меньшей мере, части блока регистрации, которое определяет одномерное расстояние между собой и идентификационной меткой. Устройство измерения расстояния является лазерным дальномером в особенно предпочтительной форме выполнения. В частности, устройство измерения расстояния является частью вышеуказанного блока регистрации. Оно работает в качестве измерителя от точки к точке и измеряет таким образом расстояние вдоль линейного направления измерения.
Идентификационная метка может иметь упомянутую выше контурную характеристику, которая тогда может регистрироваться на основе измерения расстояния.
В особенно предпочтительной форме выполнения устройства контурная характеристика идентификационной метки образована основной плоскостью и, по меньшей мере, одним структурным элементом, создающим контур относительно нее. Структурный элемент представляет собой, например, выступающий от основной площади прямоугольный параллелепипед, который тогда образует кромки на своих краях. Они отражаются тогда в измерении расстояния как скачок расстояния. Например, ребро в качестве структурного элемента, пересекаемое при непрерывном измерении расстояния, имеет две распознаваемые в измеряемом профиле высоты кромки как скачки расстояния.
Основная плоскость идентификационной метки, в частности, как описано выше, является плоской, по меньшей мере, в области идентификационной метки, в которой должны выполняться или являются ожидаемыми измерения расстояния для всех допустимых положений.
В особенно предпочтительной форме выполнения устройства, по меньшей мере, одна область идентификационной метки имеет контурную характеристику, которая по отношению к различным допустимым положениям и по отношению к измеряемым расстояниям является постоянной. Другими словами, соответствующая область идентификационной метки выполнена так, что для различных допустимых положений измеряются соответственно одинаковые профили высоты или расстояния. Такие контурные характеристики используются, например, для идентификации типа объекта, который независимо от допустимого положения всегда должен регистрироваться одинаковым образом. Так получаются, например, в определенных при различных допустимых положениях профилях высоты одинаковые или сходные характеристики в соответствующих профилях. Структурные элементы выбираются, другими словами, в зависимости от типа объекта. Различия здесь могут быть обнаружены с помощью устройства определения местоположения независимо от допустимого положения. Например, таким образом могут различаться разные типы объектов, которые имеют различные известные относительные положения идентификационных меток относительно точек захвата.
Такие профили измерений могут также служить опорными профилями в целях нормировки устройства определения местоположения для соответствующего измерения.
Альтернативно или дополнительно, область идентификационной метки имеет контурную характеристику, отличающуюся по отношению к различным допустимым положениям. При этом не сама идентификационная метка или собственно ее структура высоты выполняется изменяемой, а структура высоты выполнена таким образом, что получаются различные профили высоты в направлении измеряемого расстояния. Другими словами, идентификационная метка выполнена таким образом, что для различных допустимых положений измеряются измененные профили высоты. Измеренные профили высоты, таким образом, зависят от допустимого положения. Таким образом, возможно однозначное определение допустимого положения из измерения расстояния. Например, при различных допустимых положениях идентификационная метка пересекается по различным линиям с направления измерения. Тогда контурные характеристики в области линий также различны.
В особенно предпочтительной форме выполнения изобретения вычислительное средство представляет собой программируемое управление с памятью. Наиболее предпочтительно оно является частью уже существующего управления установки. Вышеназванные измерения расстояния являются по сравнению с оценкой изображения камеры математически простыми операциями, которые могут быть легко выполнены с помощью программируемого управления с памятью (SPS). Таким образом, отпадают затраты на дополнительные высокопроизводительные аппаратные средства в установке. Автоматическое распознавание положения точки захвата может выполняться существующей системой управления установки простым и экономичным способом.
В соответствии с изобретением, таким образом, используется идентификационная метка вместе с устройством определения местоположения как система кодирования для определения допустимого положения. В частности, на основе двумерного измерения (измерения от точки к точке в разных местах) и простых математических операций можно определить пространственные координаты объекта, а также возможный поворот и тип объекта. Устройство определения местоположения может быть выполнено в виде простого устройства, например, приводимого линейным приводом лазерного дальномера, который регистрирует кодирование на объекте. Возможна простая SPS оценка.
Изобретение обеспечивает интеграцию автоматического захвата объекта в полностью автоматизированную установку, например полностью автоматизированный сталеплавильный цех; а также быстрый и безопасный захват объекта средством транспортировки, экономию эксплуатационных расходов, в частности сокращение персонала для обслуживания средствами транспортировки. Захват объекта средством транспортировки осуществляется на основе измеренных значений и математических операций без какого-либо вмешательства человека и, следовательно, воспроизводимым образом.
Способ и устройство могут быть использованы для различных установок и захватываемых объектов. Возможность оценки в простой SPS системе избавляет от координации со сторонними фирмами, а также от приобретения РС-блока с программным обеспечением и его интеграции в сеть. Описываемое изобретение является более экономичным, чем, например, вышеупомянутые системы с видеокамерой, лазерным сканером или их комбинацией.
Изобретение описывается далее на примерах выполнения со ссылками на чертежи, на которых в схематичном представлении показано следующее:
Фиг. 1 - общий вид способа,
Фиг. 2 - установка на виде сбоку,
Фиг. 3 - установка по фиг.2 на виде сверху,
Фиг. 4 - идентификационная метка на виде сбоку,
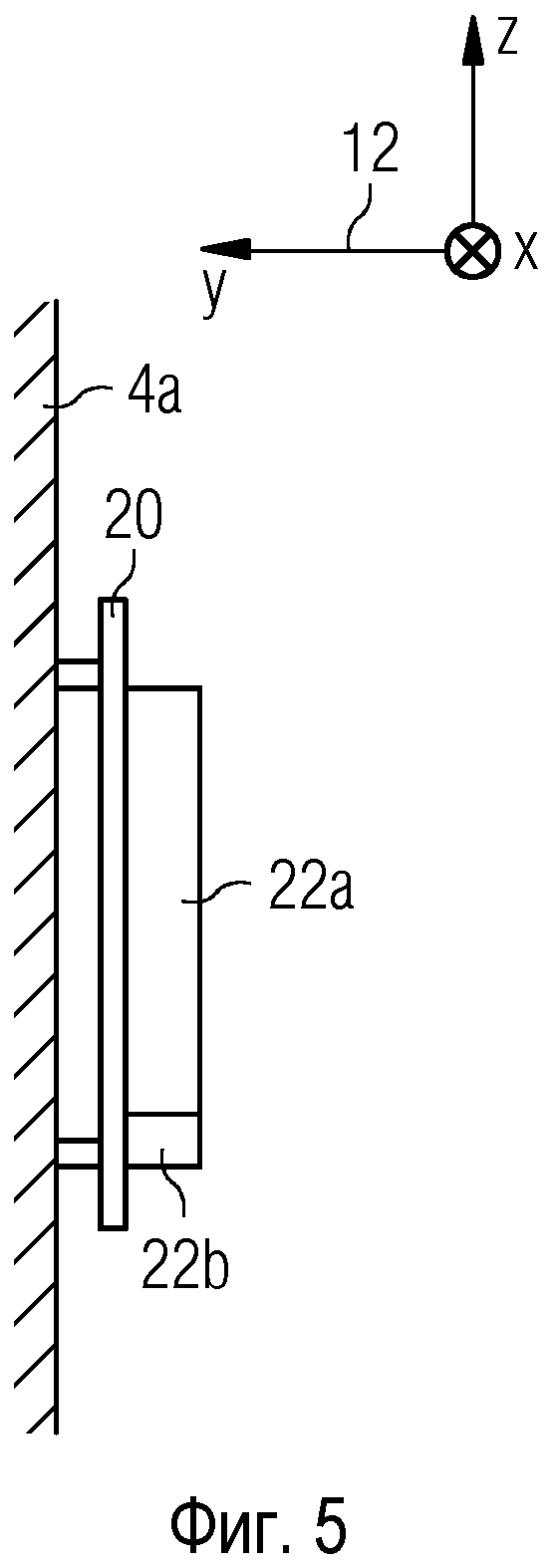
Фиг. 5 - идентификационная метка по фиг. 4 на другом виде сбоку,
Фиг. 6 - идентификационная метка по Фиг. 4 в установке на виде сверху,
Фиг. 7 - профиль высоты, измеренный по идентификационной метке.
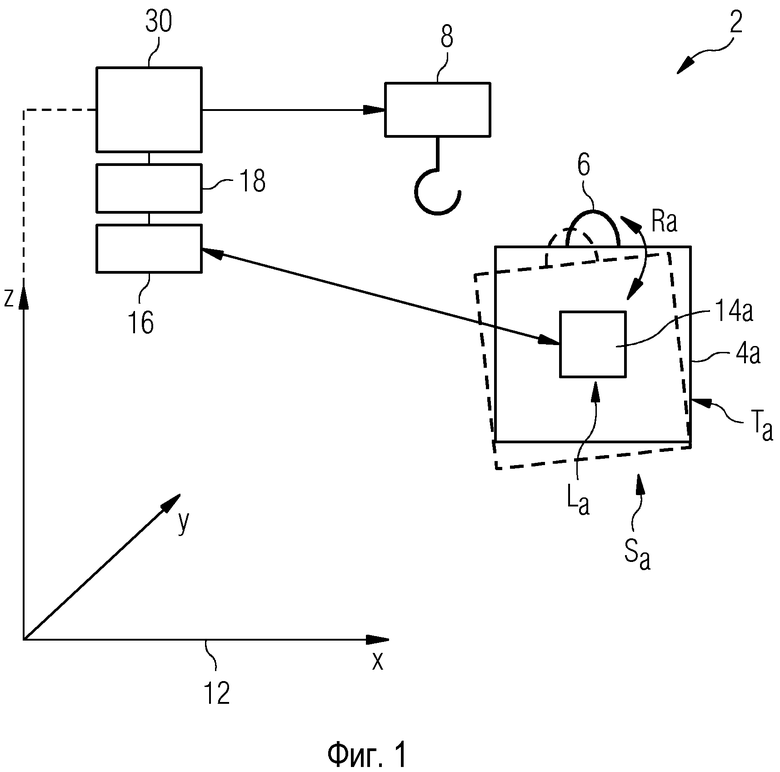
Фиг. 1 схематично показывает установку 2 с объектом 4а, который имеет точку 6 захвата. В этой точке он захватывается средством 8 транспортировки. В установке 2 существует неподвижная связанная с установкой система 12 координат установки. Объект 4а и, следовательно, его точка захвата должны были бы идеальным образом находиться в заданном положении Sa. На самом деле, он находится в - обычно отклоняющемся от него - допустимом положении Ta. Для того чтобы средство 8 транспортировки могло точно подходить к точке 6 захвата с помощью ориентирующегося согласно системе 12 координат блока 30 управления, допустимое положение Та должно точно определяться.
На объекте прикреплена идентификационная метка 14а, которая таким образом находиться в известном относительном положении R по отношению к точке 6 захвата. Соединенное с блоком 30 управления вычислительное устройство 18 осуществляет связь с устройством 16 определения местоположения. На этой основе оно определяет пространственное положение La идентификационной метки 14а в системе 12 координат установки и, таким образом, в установке 2. На основе пространственного положения La и относительного положения R оно затем определяет допустимое положение Ta точки 6 захвата и, как правило, также всего объекта. Также возможно, в качестве альтернативы, знать относительное положение R между идентификационной меткой 14а и объектом 4а и сначала определить допустимое положение самого объекта 4а и отсюда определить допустимое положение точки 6 захвата, находящейся на объекте 4а, в свою очередь, в известном относительном положении.
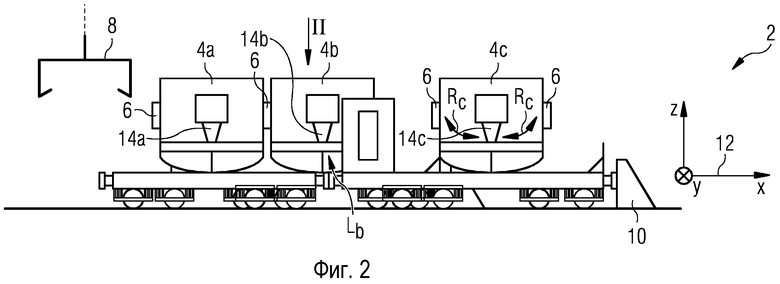
Фиг. 2 показывает более реалистичный фрагмент установки 2 на примере EAF-установки с тремя объектами 4а-с, например, скрапоразгрузочными корзинами. Каждый из объектов 4а-с имеет соответствующие точки 6 захвата, в которых они должны захватываться средством 8 транспортировки, в данном случае загрузочным краном. Фиг. 2 показывает вид сбоку, Фиг. 3 - вид сверху в направлении стрелки II на ситуацию.
Объекты 4а-с хранятся здесь на не показанных подробно рельсовых средствах транспортировки или перевозки скрапа, которые доставляются к соответствующему упорному буферу 10. Объекты 4а-с приводятся, таким образом, в, по меньшей мере, приближенно определенные допустимые положения Ta-с, то есть с достаточным допуском, в так называемые позиции передачи в состояние покоя. Однако они отличаются, как правило, от идеального заданного положения Sa-с, которое они должны занимать.
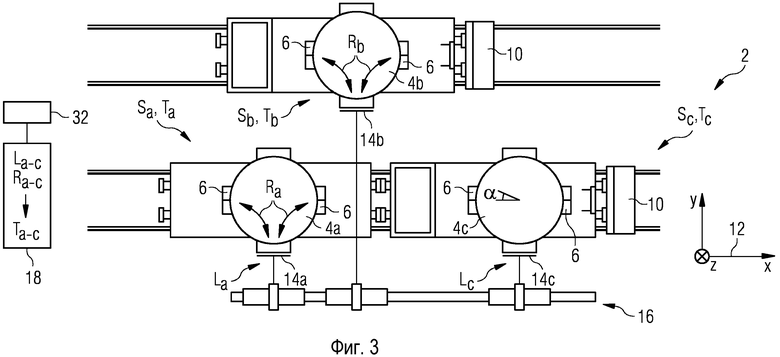
В этом примере объекты 4а-с располагаются в заданных положениях Sa-c в X-направлении и Y-направлении с точностью ± 6 см, а также в Z-направлении с отклонением от 0 до 15 см. В частности, допуск в Z-направлении обоснован наличием возможной грязи и кусков скрапа между скрапоразгрузочными корзинами и местом стоянки механизма перемещения скрапа. Кроме того, объекты 4а-с, при обстоятельствах, легко поворачиваются в пределах угла α допуска на несколько градусов вокруг оси. Допуски в X- и Y-направлении обусловлены буферами 10 и рельсовой направляющей, а также положением или прилеганием объекта 4-с к механизму перемещения скрапа. В соответствии с изобретением к каждому объекту 4а-с прикреплена идентификационная метка 14а-с. Их соответствующие относительные положения Rа-с по отношению к связанному объекту 4а-с или точкам 6 захвата известны.
Установка 2 также содержит устройство 16 определения местоположения для соответствующих пространственных положений Lа-с идентификационных меток 14а-с в системе 12 координат установки с помощью вычислительного устройства 18, в данном случае в виде SPS. Вычислительное устройство 18 затем определяет из соответствующих пространственных положений Lа-с и известных относительных положений Rа-с соответствующие допустимые положения Tа-с точек 6 захвата в системе 12 координат установки.
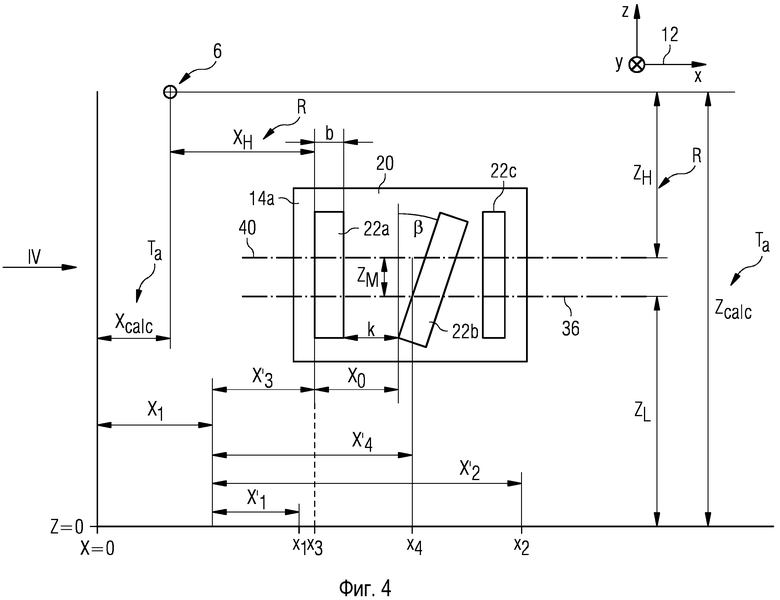
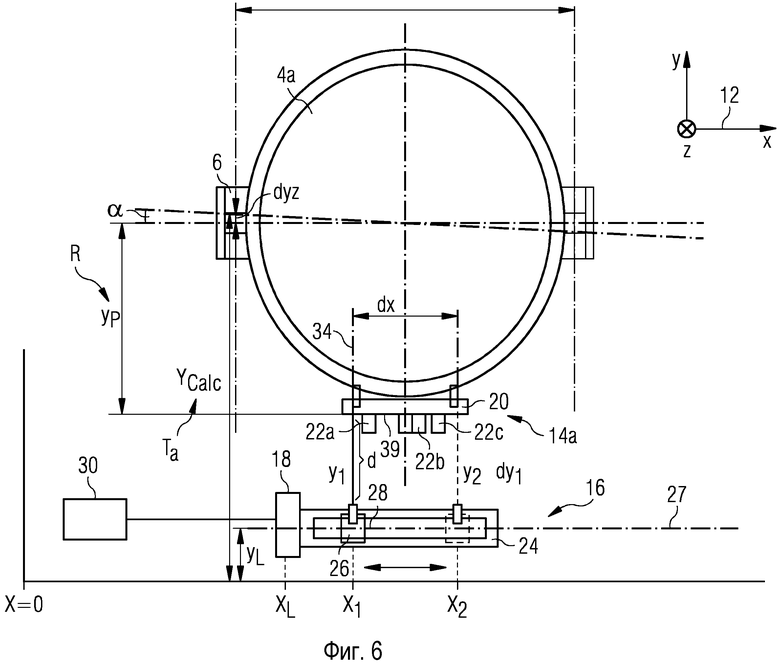
Фиг. 4 показывает идентификационную метку 14а детально на виде сбоку в направлении оси у. Фиг. 5 показывает вид сбоку идентификационной метки 14а в направлении стрелки IV, то есть в X-направлении, и как она прикреплена к объекту 4а. Фиг. 6 детально показывает на виде согласно Фиг. 2 в Z-направлении объект 4а с идентификационной меткой 14 и устройство 16 определения местоположения.
Идентификационная метка 14a имеет в этом примере железную, образующую здесь плоскую основную плоскость 20, основную пластину со смонтированными на ней параллельно рельефными структурными элементами 22а-с в форме ребер, которые выступают от основной плоскости 20 и образуют соответствующие перпендикулярные основной плоскости 20 боковые кромки.
Устройство 16 определения местоположения имеет проходящий в X-направлении основной каркас 24, на котором блок 26 регистрации может перемещаться в X-направлении вдоль прямой линии 27. Блок 26 регистрации является лазерным дальномером в данном примере. Движение блока 26 регистрации осуществляется с помощью линейного привода 28. Все устройство 16 определения местоположения обслуживается блоком 30 управления и вычислительным устройством 18, символически представленным как часть системы управления установкой (SPS).
Устройство 16 определения местоположения или блок 26 регистрации определяет при этом расстояние d между собой и противоположной точкой, которая на Фиг. 5 всегда перемещается вдоль идентификационной метки 14а. Измерение расстояния осуществляется вдоль направления 34, которое всегда перпендикулярно прямой линии 27, таким образом, направление движения здесь также проходит в Y-направлении.
После того, как механизм перемещения скрапа вместе с находящимся на нем объектом 4а на Фиг. 1 или 2 займет свое допустимое положение Tа в состоянии покоя, устройство 16 определения местоположения начинает свое измерение расстояния d посредством блока 26 регистрации. При этом блок 26 регистрации обнаружения перемещается из показанного сплошной линией положения x1 на Фиг. 6 в направлении положительной Х-оси к показанному пунктирной линией положению x2.
При этом пройденное расстояние равно dX=X2-X1. Соответствующие X-положения привязаны здесь к нулевому положению X=0 системы 12 координат установки. Положение неподвижного основного каркаса 24 известно как хL. Величины x1 и x2 получаются как смещения х1′ и x2′ блока 26 регистрации относительно основного каркаса 24, добавленные к хL.
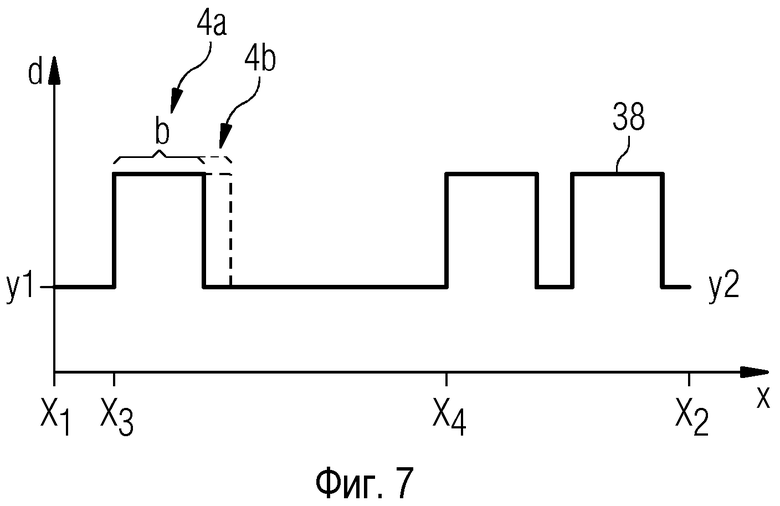
Точка измерения при измерении расстояния пересекает идентификационную метку 14а вдоль измерительной линии 36. Фиг. 7 показывает нанесенную по X-координате характеристику измеренных расстояний d, а именно измеряемого профиля 38 высоты. При этом профиль 38 высоты очищается путем фильтрации после измерения. Профиль 38 высоты отображает контурную характеристику 39 идентификационной метки 4а, полученную с помощью измерения расстояния. Посредством оценки профиля 38 высоты блок 30 управления определяет допустимое положение Ta - здесь X, Y, Z-пространственное положение, а также угол α поворота вокруг z-оси идентификационной метки 14а или объекта 4а. Посредством известного относительного положения Rа по отношению к идентификационной метке 14а или объекту 4а затем определяется фактическое допустимое положение Та точки 6 захвата объекта 4а, и здесь, в свою очередь, ее X, Y, Z-пространственное положение и угол α поворота вокруг z-оси.
Более подробно, кроме того, известно Y-положение YL прямой 27 и, тем самым, блока 26 регистрации и измерительной линии 36 как расстояние до нулевой точки Y=0. Из измеренных расстояний d и X-координат X1 и Х2 получаются соответствующие фактические Y-координаты Y1 и Y2 основной плоскости 20 путем суммирования расстояний d и величины YL в месте измерительной линии 36. Так как в данном случае объект 4а повернут на угол α, существует разность dY1 = Y1-Y2. Через известные размеры объекта 4а (поперечник, положение точки 6 захвата) в установке 2 может быть вычислен угол α, а также получаемые в результате этого отклонения X-Y-координат точек 6 захвата в допустимом положении Та. Например, при этом известно постоянное Y-расстояние Yр между идентификационной меткой 14а и точкой 6 захвата как часть известного относительного положения R. Из определенных величин и известных размеров объекта 4а можно определить фактическое положение Ycalc точки 6 захвата, которое, таким образом, образует часть допустимого положения Та. В вычисление Ycalc входит, например, еще отклонение dY2, которое получается из угла α или из dY1 и закона хода лучей.
В измеренном профиле 38 высоты получаются значения X3 и Х4 - место скачков расстояния - как соответствующие нулевые координаты XL устройства 16 определения местоположения вместе с соответствующими текущими смещениями X′3 и Х′4 блока 26 регистрации по отношению к нулевой точке XL. Скачок профиля 38 высоты в месте X3 вызван структурным элементом 22а. Его положение ХН как часть относительного положения Rа по отношению к точке 6 захвата (лишь символически показано на Фиг. 3), в свою очередь, известно. Таким образом, x-положение Хcalc допустимого положения Тa может быть вычислено.
Если бы объект 4а находился в своем заданном положении Sа, то лазерное пятно блока 26 регистрации попадало бы на идентификационную метку 14а на высоте нулевого уровня 40, так что там получалась бы измерительная линия 36. Однако ввиду фактического смещения высоты объекта 4а в +Z-направлении, лазерное пятно проходит идентификационную метку 14а на уровне фактической линии измерения 36. Так как структурный элемент 22b наклонен под углом β по отношению к структурному элементу 22а вокруг Y-оси, можно из фактического расстояния или X4-X3 и угла β определить смещение по высоте ZM измерительной линии 36 по отношению к нулевому уровню 40. Соответствующие расчеты угла могут быть выполнены из известного расстояния К между обоими структурными элементами 22a и 22b и угла раскрытия β.
Промежуток ребер между структурными элементами 22а, b, ввиду их наклона, также зависит от z-компоненты допустимого положения Tа. Поэтому данная область идентификационной метки образует по отношению к различным допустимым положениям Tа в направлении измеряемого расстояния d различную контурную характеристику.
Вместе с известным, в свою очередь, относительным положением ZH между нулевым уровнем 40 и точкой 6 захвата как часть известного относительного положения Ra и известным положением по высоте ZL лазерного луча блока 26 регистрации в системе 12 координат можно также определить Z-положение Zcalc допустимого положения Tа.
Ширина b ребра может при этом варьироваться между различными объектами 4а, b (показано на Фиг. 7), чтобы их различать друг от друга на основе измеренного значения b в профиле 38 высоты. Альтернативно или дополнительно, различение объектов 4а, b может осуществляться на основе других дополнительных ребер, таких, например, как структурный элемент 22с, или его пропуска.
Ширина b ребра или расстояние между параллельными структурными элементами 22а, с являются в значительной степени независимыми от всех ориентаций идентификационной метки 14а в допустимых положениях Tа. Поэтому данная область идентификационной метки образует по отношению к различным допустимым положениям Tа в направлении измеряемого расстояния d постоянную контурную характеристику и может быть использована для независимого от допустимого положения обнаружения типа объекта.
То, что вообще присутствует механизм перемещения скрапа, может, например, также распознаваться на основе профиля 38 высоты, если остальная структура механизм перемещения скрапа в соответствующей области, которая может регистрироваться посредством устройства 16 определения местоположения, не имеет никаких плоских поверхностей с размером идентификационных меток 14а-с. Только при наличии механизма перемещения скрапа или идентификационной метки тогда вообще получается профиль высоты с примерно плоской, отображающей основную плоскость 20 основной линией и перемежающимися скачками высоты.
Изобретение относится к средствам установки объектов для захвата при транспортировке. Технический результат заключается в повышении точности определения местоположения точки захвата. В способе определяют отклонение от заданного положения (Sа-с) допустимого положения (Та-с) точки (6) захвата объекта (4а-с), расположенного в установке (2), средством (8) транспортировки. На объект (4а-с) прикрепляют идентификационную метку (14а-с) в известном относительном положении (Rа-с) по отношению к точке (6) захвата, определяют пространственное положение (Lа-с) идентификационной метки (14а-с) в установке (2), вычислительное устройство (18) определяет допустимое положение (Та-с) из пространственного положения (Lа-с) и относительного положения (R), по которым определяют точку захвата. 2 н. и 14 з.п. ф-лы, 6 ил.
1. Способ определения отклоняющегося от заданного положения (Sa-c) допустимого положения (Та-с) точки (6) захвата объекта (4а-с), расположенного в установке (2), захватываемого средством (8) транспортировки, при котором:
- на объект (4а-с) прикрепляют идентификационную метку (14а-с) в известном относительном положении (Ra-c) по отношению к точке (6) захвата,
- вычислительное устройство (18) с помощью размещенного в установке (2) устройства (16) определения местоположения определяет пространственное положение (La-c) идентификационной метки (14а-с) в установке (2),
- вычислительное устройство (18) определяет допустимое положение (Ta-c) из пространственного положения (La-c) и относительного положения (R),
отличающийся тем, ЧТО
- устройство (16) определения местоположения измеряет по меньшей мере одно одномерное расстояние (d) между собой и идентификационной меткой (14а-с), и
- вычислительное устройство (18) определяет пространственное положение (Lа-c) на основе по меньшей мере одного одномерного расстояния (d).
2. Способ по п. 1,
в котором снабженную контурной характеристикой (39) идентификационную метку (14а-с) прикрепляют к объекту (4а-с) таким образом, что контурная характеристика (39) при нахождении объекта (4а-с) в заданном положении (Sa-c) ориентирована в направлении (34) измеряемого расстояния (d).
3. Способ по п. 1 или 2,
в котором содержащийся в устройстве (16) определения местоположения блок (26) регистрации, измеряющий расстояние (d), перемещают относительно неподвижного объекта (4а-с).
4. Способ по п. 3,
в котором блок (26) обнаружения перемещают вдоль прямой линии (27).
5. Способ по п. 4,
в котором идентификационную метку (14а-с), имеющую плоскую основную плоскость (20), прикрепляют к объекту таким образом, что при нахождении объекта (4а-с) в заданном положении (Sa-c) основная плоскость (20) ориентирована параллельно прямой линии (27).
6. Способ по п. 4 или 5,
в котором расстояние (d) измеряют в направлении (34), перпендикулярном к прямой линии (27).
7. Устройство для определения отклоняющегося от заданного положения (Sa-c) допустимого положения (Ta-c) точки (6) захвата объекта (4а-с), расположенного в установке (2), захватываемого средством (8) транспортировки, содержащее:
- идентификационную метку (14а-с), прикрепляемую на объекте (4а-с) в известном относительном положении (R) по отношению к точке (6) захвата,
- вычислительное устройство (18), определяющее с помощью размещенного в установке (2) устройства (16) определения местоположения пространственное положение (Lа-с) идентификационной метки (14а-с) в установке (2) и определяющее допустимое положение (Ta-c) из пространственного положения (La-c) и относительного положения (R),
отличающееся тем, что
- устройство (16) определения местоположения содержит устройство измерения расстояния, определяющее одномерное расстояние (d) между собой и идентификационной меткой (14а-с), в качестве по меньшей мере части блока (26) регистрации.
8. Устройство по п. 7,
в котором идентификационная метка (14а-с) содержит контурную характеристику (39), ориентированную при нахождении объекта (4а-с) в заданном положении (Sa-c) в направлении (34) измеряемого расстояния (d).
9. Устройство по п. 8,
в котором контурная характеристика (39) образована основной плоскостью (20) и по меньшей мере одним очерченным по отношению к ней структурным элементом (22а-с).
10. Устройство по любому из пп. 8 и 9,
в котором по меньшей мере одна область идентификационной метки (14а-с) имеет контурную характеристику (39), постоянную по отношению к различным допустимым положениям (Ta-c) в направлении измеряемого расстояния (d).
11. Устройство по любому из пп. 8 и 9,
в котором по меньшей мере одна область идентификационной метки (14а-с) имеет контурную характеристику (39), различную по отношению к различным допустимым положениям (Ta-c) в направлении измеряемого расстояния (d).
12. Устройство по п. 10,
в котором по меньшей мере одна область идентификационной метки (14а-с) имеет контурную характеристику (39), различную по отношению к различным допустимым положениям (Та-c) в направлении измеряемого расстояния (d).
13. Устройство по любому из пп. 7-9, в котором вычислительное устройство (18) представляет собой программируемое управление с памятью.
14. Устройство по п. 10, в котором вычислительное устройство (18) представляет собой программируемое управление с памятью.
15. Устройство по п. 11, в котором вычислительное устройство (18) представляет собой программируемое управление с памятью.
16. Устройство по п. 12, в котором вычислительное устройство (18) представляет собой программируемое управление с памятью.
| EP 1519372A2, 30.03.2005 | |||
| DE 212009000055U1, 25.02.2011 | |||
| СПОСОБ ЛЕСОЗАГОТОВОК И ВАЛОЧНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2208307C2 |
| Система автоматического регулирования котлоагрегата | 1980 |
|
SU932115A1 |

