Изобретение относится к измерительной технике и может быть использовано в следящих приводах, в автоматических системах управления мобильными объектами и в робототехнике.
Известен амплитудный способ измерения угла поворота вала привода (В.Г. Домрачеев, В.Р. Матвеевский, Ю.С.Смирнов. Схемотехника цифровых преобразователей перемещений. М.: «Энергоатомиздат», 1987, стр. 157), по которому к первичной обмотке возбуждения синусно-косинусного вращающегося трансформатора (СКВТ) подводят напряжение синусоидальной формы, с «синусной» и «косинусной» обмоток СКВТ считывают сигналы в виде амплитудно-фазовой (АФ) модуляции с огибающими, соответственно, синусоидальной и косинусоидальной форм, амплитуды которых пропорциональны измеряемому углу. Полученные сигналы демодулируют с помощью фазовых детекторов и фильтруют, выделяя из каждого низкочастотные огибающие. Сопоставляя знаки огибающих, определяют номер квадранта (четверть) для устранения неоднозначности вычислений угла и вычисляют величину самого угла поворота вала с учетом найденного квадранта.
Недостатками данного способа являются:
- возникновение погрешности измерения из-за нестабильности частоты сигнала, формируемого генератором возбуждения СКВТ, и ухудшение достоверности измерений из-за нарушения взаимной нормировки амплитуд выходных сигналов СКВТ;
- использование сложного метода и средств амплитудно-фазовой демодуляции сигналов СКВТ, дополнительно снижающих точность измерения угла.
Известен способ измерения угла поворота вала привода (Патент РФ №2313764 от 27.12.2007, МКИ G01B 7/30), по которому к первичной обмотке возбуждения СКВТ подводят напряжение синусоидальной формы. С «синусной» и «косинусной» обмоток СКВТ считывают, соответственно, сигналы в виде амплитудно-фазовой модуляции и огибающими синусоидальной и косинусоидальной форм, амплитуды которых пропорциональны измеряемому углу. Синхронизируют моменты считывания мгновенных значений выходных сигналов, сохраняют их в схемах выборки-хранения, с помощью аналого-цифрового преобразователя (АЦП) преобразуют их в цифровой вид и записывают полученные цифровые коды в регистре данных.
Недостатками данного способа являются:
- возникновение погрешности измерений и ухудшение достоверности результатов из-за погрешности взаимной нормировки амплитуд выходных сигналов СКВТ и нестабильности частоты сигнала возбуждения СКВТ;
- снижение точности измерения угла из-за использования амплитудно-фазовой демодуляции сигналов СКВТ;
- возникновение дополнительной погрешности измерений угла из-за неточности определения момента синхронизации и считывания.
Известно устройство для измерения угла поворота вала привода (В.Г. Домрачеев, В.Р. Матвеевский, Ю.С. Смирнов. Схемотехника цифровых преобразователей перемещений. М.: «Энергоатомиздат», 1987, стр. 157), содержащее генератор синусоиды, СКВТ, усилитель, фазовый демодулятор и фильтр, выделяющие полезный сигнал, пропорциональный измеряемому углу.
Недостатком данного устройства является невысокая точность измерения угла из-за наличия в схеме амплитудно-фазового демодулятора и, как следствие, большого количества промежуточных операций.
Известно устройство для измерения угла поворота вала привода (Патент РФ №2313764 от 27.12.2007, МКИ G01B 7/30), содержащее генератор синусоидального сигнала, СКВТ, дифференциальный усилитель, устройство выборки-хранения, аналого-цифровой преобразователь, регистр данных, блок управления и устройство синхронизации.
Недостатками данного устройства являются:
- невысокая точность измерения угла поворота вала привода из-за погрешностей в работе амплитудно-фазового демодулятора;
- сложная электрическая схема подключения СКВТ.
Данное устройство по совокупности основных характеристик является наиболее близким к заявленному предложению и выбрано в качестве прототипа.
Задачами, на решение которых направлено изобретение, являются повышение точности и достоверности измерения угла поворота вала привода.
Технический результат, который достигается предложением, заключается в устранении влияния нестабильности частоты возбуждения на точность измерений угла поворота вала привода и в увеличении количества достоверно получаемых разрядов двоичных кодов синуса и косинуса измеренного угла в цифровых регистрах.
В известном техническом решении, выбранном в качестве прототипа, считывается и обрабатывается сигнал, имеющий АФ-модуляцию. В предлагаемом техническом решении результат достигается преобразованием сигнала из АФ-модуляции в сигнал с АМ-модуляцией, позволяя устранить влияние нестабильности частоты сигнала возбуждения и совместной ненормированности амплитуд выходных сигналов на точность измерения угла поворота, повышая достоверность полученных результатов. К тому же принцип АМ-модуляции и детектирования (демодуляции) широко известны в технике радиоприема и не потребуют разработки новых электронных компонентов для своей реализации.
Сущность заявленного способа заключается в том, что первичную обмотку СКВТ возбуждают генератором гармонического синусоидального напряжения. Затем выходные сигналы СКВТ с амплитудно-фазовой модуляцией преобразуют в сигналы с амплитудной модуляцией. Преобразование из одного вида модуляции в другой производят суммированием напряжения генератора с напряжениями соответствующих «синусной» и «косинусной» обмоток СКВТ, предварительно уменьшив их амплитуды дифференциальными усилителями с коэффициентами усиления, меньшими единицы. Значения коэффициентов усиления усилителей подстраивают так, чтобы сигналы после усиления имели одинаковые (нормированные) амплитуды. Несоблюдение равенства амплитуд приведет к появлению погрешности преобразования измеряемого угла поворота вала из-за нарушения требования ортогональности считываемых сигналов. Затем сигналы детектируют с помощью амплитудных детекторов, фильтруют и преобразуют с помощью АЦП в цифровые коды синуса и косинуса измеряемого угла, записывая их в выходные регистры.
Сущность устройства в том, что оно состоит из двух структурно одинаковых каналов, причем в составе каждого из каналов есть: дифференциальный усилитель с подстраиваемым коэффициентом усиления, но меньше единицы, сумматор, в котором суммируются напряжение генератора возбуждения с напряжением, соответственно, или выходной «синусной», или выходной «косинусной» обмоток СКВТ. Значения синуса или косинуса измеряемого угла в цифровом виде в соответствующих каналах получают последующим их амплитудным детектированием, с помощью известных в радиотехнике амплитудных детекторов, фильтров, аналого-цифровых преобразователей и, в итоге, записывают данные в выходные регистры в цифровом виде.
Заявляемые способ и устройство измерения угла поворота вала привода поясняют следующие фигуры:
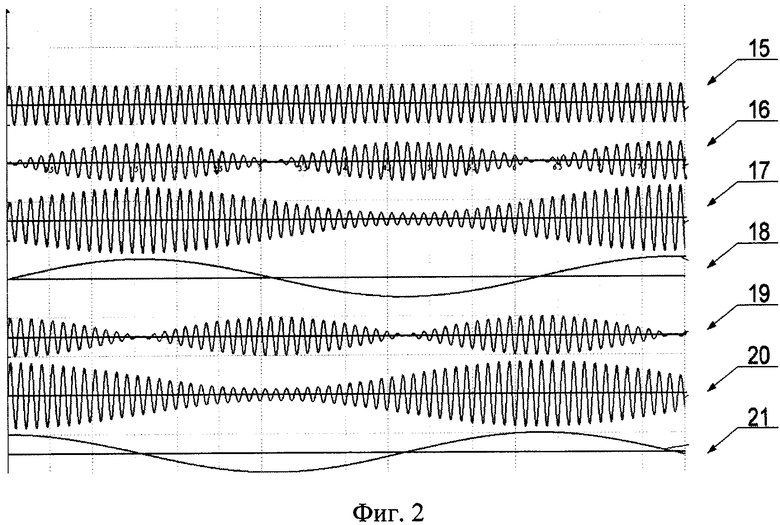
- на фиг. 1 показана функциональная схема устройства для измерения угла поворота вала привода, содержащего два идентичных канала, а также состав канала;
- на фиг. 2 показаны временные диаграммы напряжений сигналов от времени в разных точках функциональной схемы устройства для измерения угла поворота вала привода.
На фигурах приняты следующие обозначения:
1 - генератор;
2 - синусно-косинусный вращающийся трансформатор (СКВТ);
3 - обмотка возбуждения СКВТ;
4 - синусная обмотка СКВТ;
5 - косинусная обмотка СКВТ;
6 - «синусный» канал;
7 - «косинусный» канал;
8 - дифференциальный усилитель синусного сигнала;
9 - сумматор;
10 - амплитудный детектор синусного сигнала;
11 - фильтр для выделения информационного сигнала (огибающей).
12 - аналого-цифровой преобразователь (АЦП);
13 - выходной регистр;
14 - блок управления и синхронизации;
15 - сигнал в первичной обмотке 3 СКВТ от генератора возбуждения 1;
16 - АФ сигнал на выходе синусной обмотки 4 СКВТ;
17 - AM сигнал на выходе синусного сумматора 9;
18 - AM сигнал СКВТ на выходе синусного фильтра 11;
19 - АФ сигнал на косинусной обмотке СКВТ (аналогичен 16);
20 - AM сигнал на выходе косинусного сумматора (аналогичен 17);
21 - AM сигнал СКВТ на выходе косинусного фильтра (аналогичен 18).
Устройство содержит генератор 1 возбуждения, формирующий синусоидальный сигнал, СКВТ 2 с первичной обмоткой возбуждения 3 и выходными синусной 4 и косинусной 5 обмотками и два канала 6 и 7 с одинаковой структурой, в каждом из которых есть: дифференциальный усилитель 8, сумматор 9, амплитудный детектор 10, фильтр 11, аналого-цифровой преобразователь 12 и выходной регистр 13 для хранения данных в цифровом виде. Причем выход генератора 1 возбуждения присоединен как к первичной обмотке 3 возбуждения СКВТ, так и к первым входам сумматоров обоих каналов 6 и 7. Выходная синусная обмотка 4 СКВТ присоединена к входу дифференциального усилителя 8 «синусного» канала 6, а выходная косинусная обмотка 5 СКВТ присоединена к входу такого же дифференциального усилителя, но косинусного канала 7. Далее прохождение и обработка сигналов в «синусном» канале 6 и в «косинусном» канале 7 аналогичны и далее рассмотрены на примере «синусного канала» 6.
Выход дифференциального усилителя 8 присоединен ко второму входу сумматора 9, а выход сумматора присоединен к входу амплитудного детектора 10. После детектирования с выхода детектора сигнал подается на фильтр 11 для выделения низкочастотной огибающей. С его выхода выделенная низкочастотная огибающая поступает на вход аналого-цифрового преобразователя (АЦП) 12. Оцифрованный сигнал с выхода АЦП поступает на вход регистра 13, где запоминается и может быть использован как конечный результат работы устройства. Всеми устройствами управляет блок 14 управления и синхронизации.
Сущность заявленного способа состоит в изменении используемого вида модуляции при обработке выходных сигналов СКВТ. Используемый в известных аналогах способ обработки сигналов СКВТ, представленных в АФ-модулированном виде, связан с большими аппаратными и временными затратами и с возникновением дополнительных погрешностей измерения, в то время, как предложенный способ с предварительной заменой вида модуляции из АФ в AM существенно упрощает схему устройства, сокращает количество промежуточных операций обработки сигналов для получения конечной цели измерения и в результате уменьшает погрешность измерений угла поворота выходного вала привода.
Устройство для измерения угла поворота вала привода и способ его работы поясняются приведенной математической моделью и временными диаграммами на фиг. 2. Гармонический сигнал возбуждения может быть представлен формулой 1, ему соответствует временная диаграмма 15 фиг. 2,

где:
U(t) - текущее значение сигнала возбуждения;
t - время;
U0 - амплитуда сигнала на первичной обмотке СКВТ;
ω - угловая частота.
Сигналы 16, 19 фиг. 2 выходных обмоток с АФМ-модуляцией имеют, соответственно, вид:


где:
Usin - сигнал с «синусной» выходной обмотки 4;
Ucos - сигнал с «косинусной» выходной обмотки 5;
φ - угол поворота вала привода.
Известно, что канонические виды АМ-сигналов описываются, соответственно, формулами:


где:
UAM-Sin - вид амплитудно-модулированного синусного сигнала;
UAM-Cos - вид амплитудно-модулированного косинусного сигнала;
λ - коэффициент, при λ≥1 возникает т.н. эффект «перемодуляции» сигнала.
Очевидно, что формулы (3) могут быть представлены так:


Сопоставляя формулы (1), (2) и (4), можно заметить, что первые слагаемые в формулах (4) имеют вид гармонического сигнала возбуждения, а вторые слагаемые - вид сигналов с АФ-модуляцией, но дополнительно умноженные на λ<1. Таким образом, синусный и косинусный АМ-сигналы могут быть получены простым алгебраическим сложением сигнала генератора возбуждения 15 с каждым из АФ-сигналов 16 и 19, дополнительно умноженных на λ<1.
Действительно, реальный сигнал, получаемый на выходе сумматора 9 канала 6 и аналогичный ему на выходе сумматора канала 7, имеющие, соответственно, виды 17 и 20 на фиг. 2, описываются каноническими уравнениями (3).
Последующая обработка в канале 6 синусного AM-сигнала, полученного после фильтрации и показанного на временной диаграмме 18, сводится к его преобразованию в цифровой вид с помощью АЦП 12 с последующей записью в регистр 13.
Аналогично обработка в канале 7 косинусного AM-сигнала, полученного после фильтрации и показанного на временной диаграмме 21, сводится к его преобразованию в цифровой вид с помощью АЦП с последующей записью в регистр канала 7.
Реализуемость способа и устройства измерения угла поворота выходного вала привода доказывается широкой известностью применения принципа АМ-модуляции в технике радиоприема, и не потребуется разработки новых электронных компонентов.
Предложенные технические решения были апробированы в экспериментах с СКВТ типа ВТ-2.5 и ВТ-71. Технические характеристики этих СКВТ можно найти, например, в книге (В.Г. Домрачеев, В.Р. Матвеевский, Ю.С. Смирнов. Схемотехника цифровых преобразователей перемещений. М.: «Энергоатомиздат», 1987, стр. 157).
В качестве элементной электронной базы для апробации были использованы микросхемы АМ-амплитудных детекторов, синхронных AM-детекторов, УВЧ и УНЧ распространенной радиочастотной серии, например К174. Эти микросхемы популярны, а основы их использования многократно описаны в литературе (например, Цифровые и аналоговые интегральные микросхемы: Справочник. Под ред. С.В. Якубовского. М.: «Радио и связь», 1990, стр. 375).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ-КОД | 1973 |
|
SU406213A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU669374A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1758875A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU781866A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| Устройство для измерения рассогласования между углом и кодом | 1987 |
|
SU1411973A1 |
Изобретение относится к измерительной технике и может быть использовано в следящих приводах, в автоматических системах управления мобильными объектами и в робототехнике. Способ заключается в возбуждении первичной обмотки синусно-косинусного вращающегося трансформатора гармоническим напряжением генератора, считывании модулированных синусного и косинусного сигналов с выходных обмоток синусно-косинусного вращающегося трансформатора, изменении амплитуды указанных сигналов, детектировании, преобразовании их в цифровую форму и записи полученных сигналов в регистр. При этом амплитуды сигналов, считанных с выходных обмоток синусно-косинусного вращающегося трансформатора, перед преобразованием их в цифровую форму уменьшают так, чтобы их значения стали меньше амплитуды напряжения сигнала, формируемого гармоническим генератором, полученные сигналы складывают с напряжением гармонического генератора, детектируют с помощью амплитудного детектора и фильтруют. Технический результат заключается в устранении влияния нестабильности частоты возбуждения на точность измерений угла поворота вала привода и в увеличении количества достоверно получаемых разрядов двоичных кодов синуса и косинуса измеренного угла в цифровых регистрах. 2 н.п. ф-лы, 2 ил.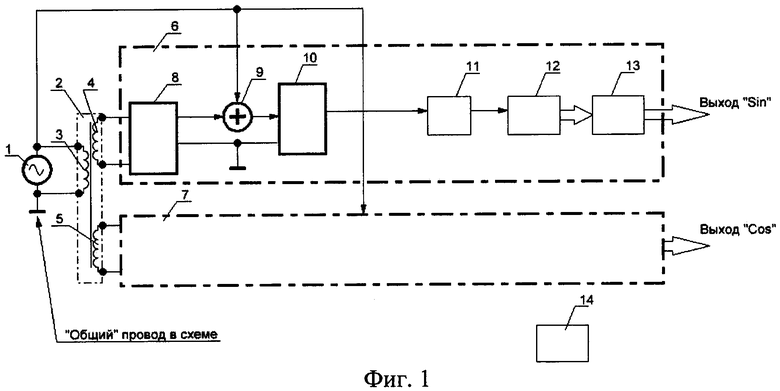
1. Способ измерения угла поворота вала привода, заключающийся в возбуждении первичной обмотки синусно-косинусного вращающегося трансформатора гармоническим напряжением генератора, считывании модулированных синусного и косинусного сигналов с выходных обмоток синусно-косинусного вращающегося трансформатора, изменении амплитуды указанных сигналов, детектировании, преобразовании их в цифровую форму и записи полученных сигналов в регистр, отличающийся тем, что амплитуды сигналов, считанных с выходных обмоток синусно-косинусного вращающегося трансформатора, перед преобразованием их в цифровую форму уменьшают так, чтобы их значения стали меньше амплитуды напряжения сигнала, формируемого гармоническим генератором, полученные сигналы складывают с напряжением гармонического генератора, детектируют с помощью амплитудного детектора и фильтруют.
2. Устройство измерения угла поворота привода, содержащее генератор синусоидального напряжения, синусно-косинусный вращающийся трансформатор с первичной обмоткой возбуждения, выходными «синусной» и «косинусной» обмотками и блок управления, причем выход генератора синусоидального напряжения присоединен к обмотке возбуждения, отличающееся наличием двух каналов с одинаковой структурой для считывания, обработки сигналов и записи данных в регистры, при этом «синусная» обмотка присоединена к усилителю, имеющему коэффициент усиления меньше единицы, первого канала, а «косинусная» обмотка - к усилителю, имеющему коэффициент усиления меньше единицы, второго канала, далее в каждом канале выход усилителя присоединен к входу сумматора, ко второму входу которого присоединен выход генератора синусоидального напряжения, выход сумматора присоединен к входу амплитудного детектора с выходом, присоединенным к входу фильтра, выход которого соединен с входом аналого-цифрового преобразователя с выходом, присоединенным к входу регистра соответствующего канала.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2313764C1 |
| Многовитковый пассивный измерительный магнитоиндукционный преобразователь | 1983 |
|
SU1188662A1 |
| CN 102128586 B, 26.12.2012 | |||
| Способ измерения угла поворота ротора синусно-косинусного вращающегося трансформатора | 1980 |
|
SU935820A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2289095C1 |

