Предлагаемая система относится к области безопасности дорожного движения и может быть использована для контроля соблюдения правил дорожного движения (ПДД).
Система представляет собой комплекс программных и технических средств, предназначенных для контроля соблюдения ПДД, а также для оповещения водителей транспортных средств (ТС) речевым сообщением с графическим отображением на мониторе обо всех постоянных или временных знаках, установленных на дорогах, вводимых или отменяемых этими знаками ограничениях.
Известны системы контроля соблюдения правил дорожного движения транспортными средствами (патенты РФ №№2.116.208, 2.155.684, 2.156.706, 2.159.190, 2.179.121, 2.194.282, 2.243.594, 2.278.415, 2.324.980, 2.382.416, 2.384.887, 2.444.793; патент Великобритании №2.291.235; Дикарев В.И. Безопасность, защита и спасение человека. - СПб, 2007, с. 78-104 и другие. Из известных систем наиболее близкой к предлагаемой является «Система контроля соблюдения правил дорожного движения» (патент РФ «2.444.793, G08G 1/01, 2010), которая и выбрана в качестве прототипа.
Данная система обеспечивает контроль соблюдения ПДД, в частности скоростного режима движения транспортных средств, правил проезда железнодорожных переездов, регулируемых перекрестков дорог и пешеходных переходов, требований дорожных знаков. Система содержит сигнальное устройство, размещаемое на пункте контроля, и исполнительное устройство, размещаемое на транспортном средстве. Сигнальное и исполнительное устройства обмениваются между собой дискретной информацией о контролируемом параметре по радиолинии, организуемой с использованием технологии расширения спектра путем псевдослучайной перестройки рабочей частоты (ППРЧ) и временным разделение каналов.
К недостаткам известной системы, использующей сигналы ППРЧ, можно отнести невозможность когерентного накопления частотных составляющих. Такое накопление возможно только в пределах длительности частотной составляющей, т.е. сигнал нельзя сжать. При этом такие сигналы распределены на больших частотно-временных плоскостях, что иногда становится недопустимым, например, в районах плотного сосредоточения радиоэлектронных средств и систем.
Технической задачей изобретения является повышение эффективности и объема передаваемой дискретной информации между пунктом контроля и транспортными средствами путем использования сложных сигналов с комбинированными видами фазовой и частотной манипуляциями.
Поставленная задача решается тем, что система контроля соблюдения правил дорожного движения, в частности скоростного режима движения транспортных средств, правил проезда железнодорожных переездов, регулируемых перекрестков дорог и пешеходных переходов, требований дорожных знаков, содержащая, в соответствии с ближайшим аналогом, сигнальное устройство, размещаемое на пункте контроля, и исполнительное устройство, размещаемое на транспортном средстве, обменивающихся между собой дискретной информацией по дуплексной радиолинии, при этом сигнальное устройство и каждое исполнительное устройство содержат синхронизатор, последовательно включенные первый блок ввода дискретных сигналов и фазовый манипулятор, последовательно включенные первый смеситель, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель и усилитель второй промежуточной частоты, последовательно включенные первый фазовый детектор и блок регистрации, отличается от ближайшего аналога тем, что она снабжена задающим генератором, вторым блоком ввода дискретных сигналов, первым и вторым гетеродинами, удвоителем фазы, тремя блоками фазовой автоподстройки частоты, тремя делителями фазы на два, частотным демодулятором, вторым, третьим и четвертым фазовыми детекторами, опорным генератором и формирователем управляющего сигнала, причем вход первого блока ввода дискретных сигналов соединен с выходом синхронизатора, к выходу синхронизатора последовательно подключены второй блок ввода дискретных сигналов, частотный манипулятор, второй вход которого через фазовый манипулятор соединен с выходом задающего генератора, а выход подключен к первому входу первого смесителя, второй вход которого соединен с выходом первого гетеродина, к выходу усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, первый блок фазовой автоподстройки частоты, первый делитель фазы на два и частотный демодулятор, выход которого соединен с вторым входом блока регистрации, к выходу удвоителя фазы последовательно подключены второй блок фазовой автоподстройки частоты и второй делитель фазы на два, выход которого соединен с вторым входом частотного демодулятора, третий вход которого соединен с выходом усилителя второй промежуточной частоты, к выходу удвоителя фазы последовательно подключены третий блок фазовой автоподстройки частоты и третий делитель фазы на два, выход которого соединен с первым входом первого фазового детектора, к выходу усилителя второй промежуточной частоты последовательно подключены второй фазовый детектор, второй вход которого соединен с выходом второго делителя фазы на два, и сумматор, второй вход которого через третий фазовый детектор соединен с выходом усилителя второй промежуточной частоты и второго делителя фазы на два, а выход соединен с вторым входом первого фазового детектора к выходу третьего делителя фазы на два, последовательно подключены четвертый фазовый детектор, второй вход которого соединен с выходом опорного генератора, формирователь управляющего сигнала и второй гетеродин, выход которого соединен с вторым входом второго смесителя.
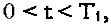
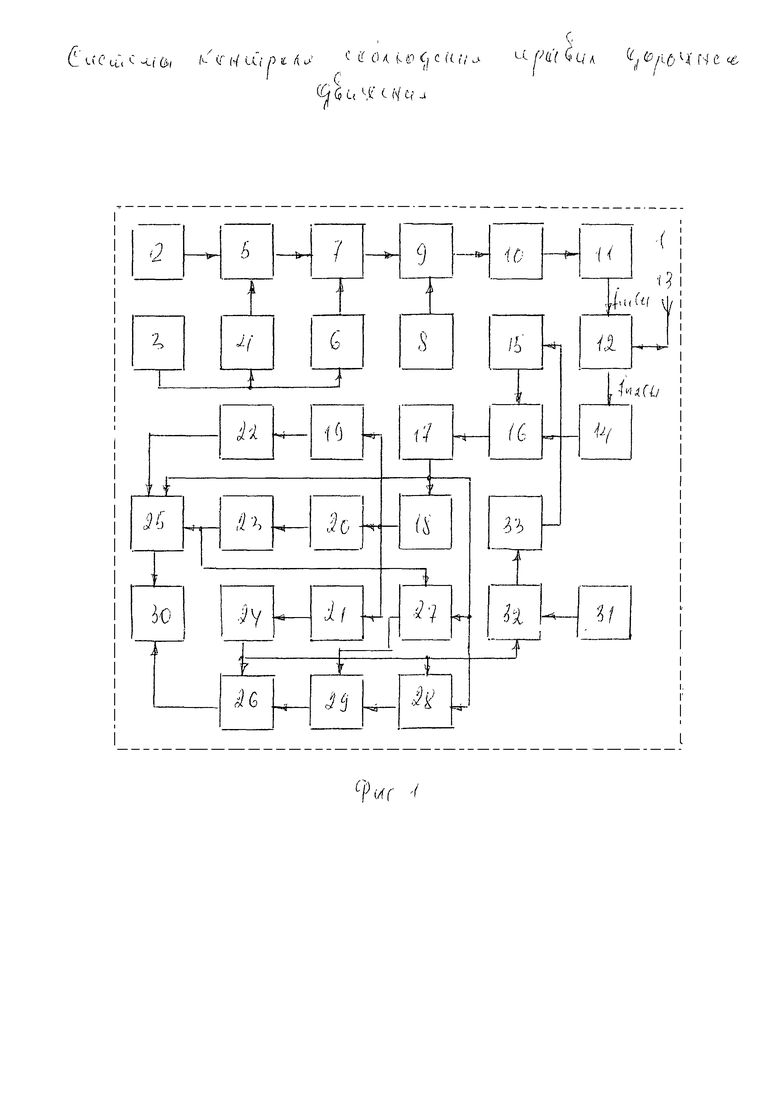
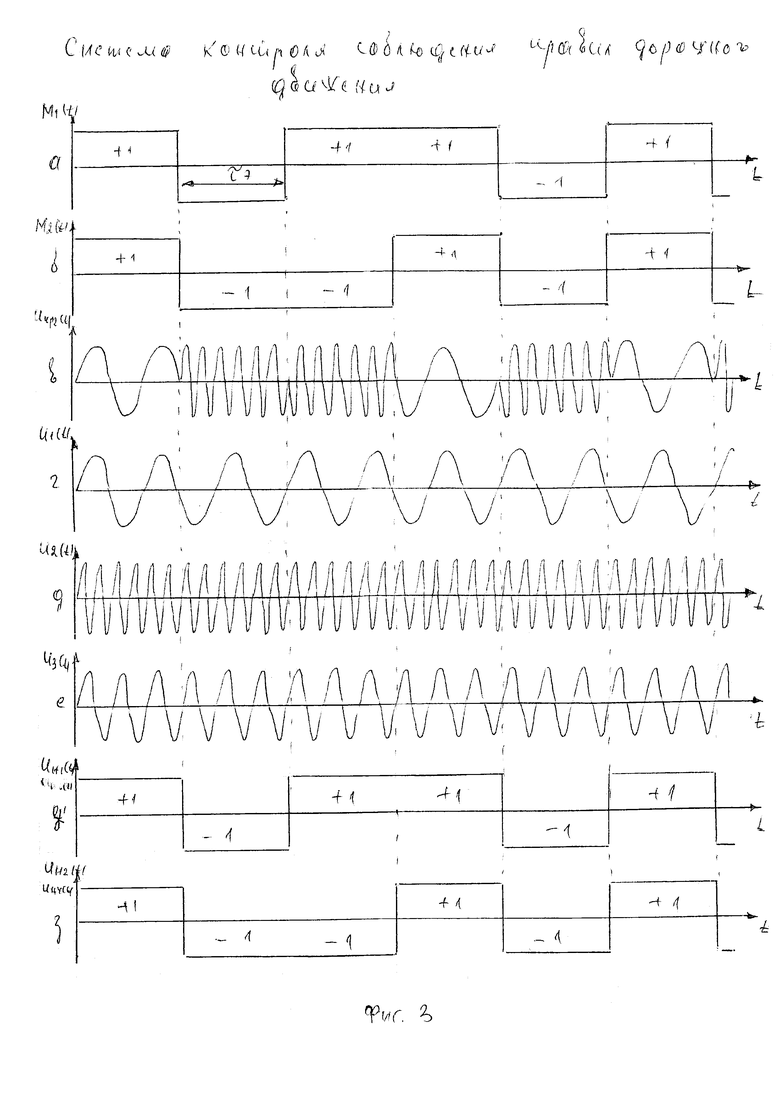
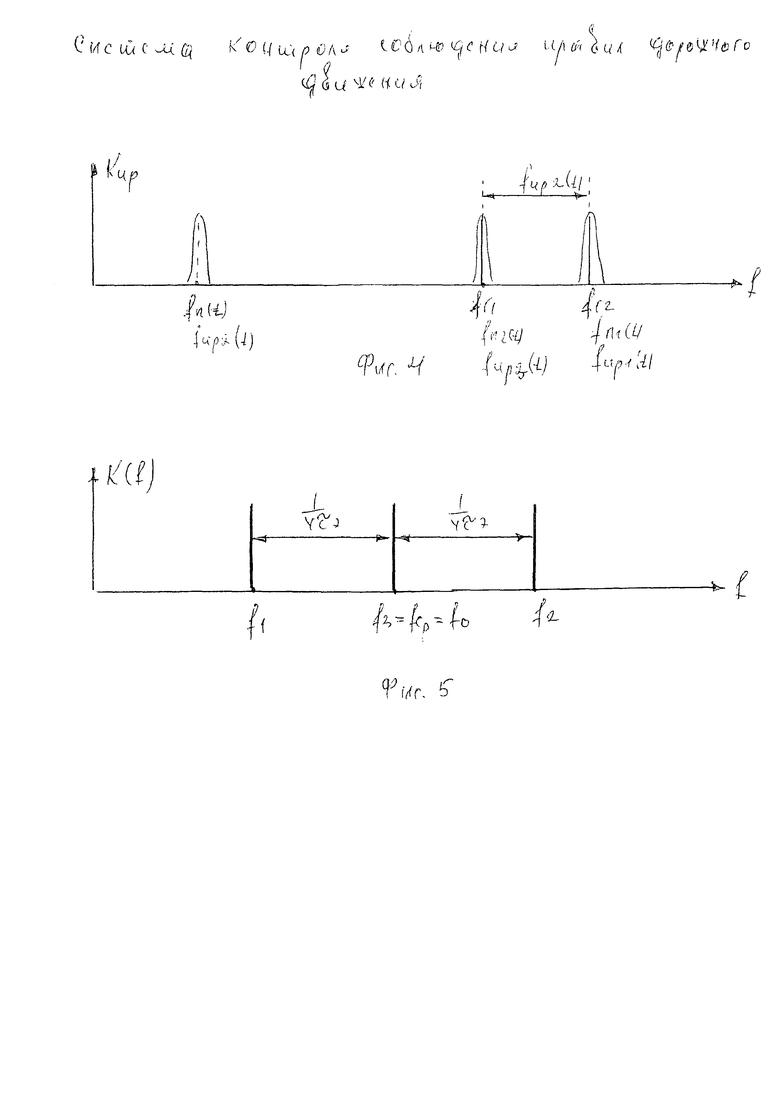
Структурная схема сигнального устройства представлена на фиг. 1. Структурная схема исполнительного устройства представлена на фиг. 2. Временные диаграммы, поясняющие работу системы, изображены на фиг. 3. Частотные диаграммы, поясняющие работу системы, изображены на фиг. 4 и 5.
Сигнальное устройство 1, размещаемое на пункте контроля, содержит последовательно включенные задающий генератор 2, фазовый манипулятор 5, второй вход которого через первый блок 4 ввода дискретных сигналов соединен с выходом синхронизатора 3, частотный манипулятор 7, второй вход которого через второй блок 6 ввода дискретных сигналов соединен с выходом синхронизатора 3, первый смеситель 9, второй вход которого соединен с выходом первого гетеродина 8, усилитель 10 первой промежуточной частоты, первый усилитель 11 мощности, дуплекер 12, вход-выход которого связан с приемопередающей антенной 13, второй усилитель 14 мощности, второй смеситель 16, второй вход которого соединен с выходом второго гетеродина 15, усилитель 17 второй промежуточной частоты, удвоитель 18 фазы, первый блок фазовой автоподстройки частоты (ФАПЧ) 19, первый делитель 22 фазы на два, частотный демодулятор 25 и блок 30 регистрации. К выходу удвоителя 18 фазы последовательно подключены второй блок ФАПЧ 20 и второй делитель 23 фазы на два, выход которого соединен с вторым входом частотного демодулятора 25, третий вход которого соединен с выходом усилителя 17 второй промежуточной частоты. К выходу удвоителя 18 фазы последовательно подключены третий блок ФАПЧ 21, третий делитель 24 фазы на два и первый фазовый детектор 26, выход которого соединен с вторым входом блока 30 регистрации.
К выходу усилителя 17 второй промежуточной частоты последовательно подключены второй фазовый детектор 27, второй вход которого соединен с выходом делителя 23 фазы на два, и сумматор 29, второй вход которого через третий фазовый детектор 28 соединен с выходами усилителя 17 второй промежуточной частоты и третьего делителя 24 фазы на два, а выход подключен к второму входу первого фазового детектора 26. К выходу третьего делителя 24 фазы на два последовательно подключены четвертый фазовый детектор 32, второй вход которого соединен с выходом опорного генератора 31, формирователь 33 управляющего сигнала и второй гетеродин 15, выход которого соединен со вторым входом второго смесителя 16.
Исполнительное устройство 34, размещаемое на транспортном средстве, содержит последовательно включенные задающий генератор 35, фазовый манипулятор 38, второй вход которого через первый блок 37 ввода дискретных сигналов соединен с выходом синхронизатора 36, частотный манипулятор 40, второй вход которого через второй блок 39 ввода дискретных сигналов соединен с выходом синхронизатора 36, первый смеситель 42, второй вход которого соединен с выходом первого гетеродина 41, усилитель 43 первой промежуточной частоты, первый усилитель 44 мощности, дуплексер 45, вход-выход которого связан с приемопередающей антенной 46, второй усилитель 47 мощности, второй смеситель 49, второй вход которого соединен с выходом второго гетеродина 48, усилитель 50 второй промежуточной частоты, удвоитель 51 фазы, первый блок 52 ФАПЧ, первый делитель 55 фазы на два, частотный демодулятор 58 и блок регистрации, в качестве которого используется контролер 63. К выходу удвоителя 51 фазы последовательно подключены второй блок 53 ФАПЧ и второй делитель фазы 56 на два, выход которого соединен с вторым входом частотного демодулятора 58, третий вход которого соединен с выходом усилителя 50 второй промежуточной частоты. К выходу удвоителя 51 фазы последовательно подключены третий блок 54 ФАПЧ, третий делитель 57 фазы на два и первый фазовый детектор 59, выход которого соединен с вторым входом контроллера 63, соединенного с блоком 65 релейных выходов, жидкокристаллическим монитором 66 и с блоком 64 внешней памяти. К выходу усилителя 50 второй промежуточной частоты последовательно подключены второй фазовый детектор 60, второй вход которого соединен с выходом второго делителя 56 фазы на два и сумматор 62, второй вход которого через третий фазовый детектор 61 соединен с выходом усилителя 50 второй промежуточной частоты и третьего делителя 57 фазы на два, а выход подключен к второму входу первого фазового детектора 59. К выходу третьего делителя 57 фазы на два последовательно подключены четвертый фазовый детектор 68, второй вход которого соединен с выходом опорного генератора 67, и формирователь 69 управляющего сигнала, выход которого соединен с входом второго гетеродина 48.
Система контроля соблюдения правил дорожного движения работает следующим образом. Исполнительное устройство 34 транспортного средства постоянно находится в режиме ожидания запроса. В пункте контроля устанавливаются сигнальные устройства 1. Диаграмма направленности антенны 13 одного сигнального устройства направлена навстречу движению транспортных средств, а диаграмма направленности антенны другого сигнального устройства направлена по ходу движения транспортных средств того же направления.
Сигнальные устройства осуществляют передачу «кода доступа запроса» и «кода параметра», при этом через антенну, направленную навстречу движению транспортных средств, передается информация «кода доступа запроса» и «кода параметра», а через другую антенну передается только информация «кода параметра».
Исполнительное устройство 34 транспортного средства анализирует принятую информацию от сигнальных устройств данного направления и, при совпадении принятого «кода параметра» с «кодом параметра», имеющимся в памяти исполнительного устройства, фиксируется нарушение контролируемого параметра.
В сигнальном устройстве с задающим генератором 2 формируется высокочастотное колебание

которое поступает на первый вход фазового манипулятора 5, а затем на первый вход частотного манипулятора 7. На вторые входы фазового 5 и частотного 7 манипуляторов с выходов первого 4 и второго 6 блоков ввода дискретных сигналов подаются модулирующие коды M1(t) (фиг. 3, а) и М2(t) (фиг. 3, б) соответственно.
На выходе частотного манипулятора 7 формируется сложный сигнал с комбинированной фазовой и частотной манипуляцией (ФМн-ЧМн)

где fn(t)={f1, f2} - манипулируемая составляющая частоты, отражающая закон частотной манипуляции в соответствии с модулирующим кодом M2(t) (фиг. 3 б), при этом fn(t)=const при nτэ<t<(n+1)τэ и может изменяться скачком Δf при t=nτэ, т.е. на границах между элементарными посылками (n=1, 2, …N-1);
φk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг. 3, а), при этом φk(t)=const при Кτэ<t<(k+1)τэ и может изменяться скачком Δφ при t=Кτэ, т.е. на границах между элементарными посылками (К=1, 2, …N-1);
τэN - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс (Tc=Nτэ),
который поступает на первый вход смесителя 9. На второй вход последнего подается напряжение первого гетеродина 8

На выходе смесителя 9 образуются напряжения комбинационных частот. Усилителем 10 выделяется напряжение первой промежуточной (суммарной) частоты

где Vпр1=1/2V1*VГ1;
fпр1(t)=fn(t)+fГ1 первая (суммарная) промежуточная частота;
fпр1=φc1-φГ1.
Это напряжение после усиления в усилителе 11 мощности через дуплексер 12 поступает в приемопередающую антенну 13, излучается ею в эфир на частоте fn1(t)=fпр1(t)=fГ2, улавливается встроенной антенной 46 исполнительного устройства 34 транспортного средства и через дуплексер 45 и усилитель 47 мощности поступает на первый вход смесителя 49, на второй вход которого подается напряжение UГ1(t) второго гетеродина 48. На входе смесителя 49 образуются напряжения комбинационных частот. Усилителем 50 выделяется напряжение второй промежуточной (разностной) частоты (фиг. 3, в).

где Vпр2=1/2Vпр1*VГ1;
fпр2(t)=fпр1(t)-fГ1 - вторая промежуточная (разностная) частота;
φпр2=φпр1-φГ1.
Это напряжение поступает на вход удвоителя 51 фазы, на первый вход частотного демодулятора 58, на первые входы фазовых детекторов 60 и 61.
Это напряжение представляет собой сложный ФМн-ЧМн-2 сигнал с непрерывной фазой и индексом частотной манипуляции mf=(f2-f1)τэ=0,5. У такого сигнала символьные частоты f1 и f2 подавлены. Указанные символьные частоты определяются следующим образом (фиг. 5):
f1=fcp-1/4τэ - частота сигнала, соответствующая символу «+1»;
f2=fcp+1/4τэ - частота сигнала, соответствующая символу «-1»;
fcp=f0=(f1+f2)/2 - средняя (мнимая) частота сигнала.
Так как в спектре принимаемого сложного ФМн-ЧМн-2 сигнала символьные частоты f1 и f2 подавлены, то радиоприемник осуществляет слежение за средней (мнимой) частотой fcp.
При удвоении фазы принимаемого сложного ФМн-ЧМн-2 сигнала в удвоителе 51 фазы его индекс частотной манипуляции приобретает значение mf=1 и его сплошной спектр трансформируется в три дискретные составляющие на частотах 2f1, 2f2 и 2f3. С помощью блоков 52, 53 и 54 ФАПЧ осуществляется фильтрация дискретных составляющих, а делители 55, 56 и 57 фазы (частоты) на два обеспечивают соответствие частот сигналов синхронизации и принимаемого сигнала. На выходе делителей 55, 56 и 57 фазы на два образуются гармонические колебания (фиг. 3г, д, е):



которые поступают на входы частотного демодулятора 58 и фазовых детекторов 59, 60 и 61.
С выхода частотного демодулятора низкочастотное напряжение UH2(t) (фиг. 3, з), пропорциональное двоичной последовательности M2(t) (фиг. 3, б), переданной с помощью частотной манипуляции, поступает на первый вход контроллера 63.
На выходе фазовых детекторов 60 и 61 образуются следующие низкочастотные напряжения соответственно:



которые суммируются в сумматоре 62

где V∑1=V4+V5
Это напряжение поступает на первый (информационный) вход фазового детектора 59, на второй (опорный) вход которого подается гармоническое колебание U3(t) с выхода третьего делителя 57 фазы на два. На выходе фазового детектора 59 образуется низкочастотное напряжение (фиг. 3, ж):

где f3=(f1+f2)/2=0,
пропорциональное модулирующему коду M1(t) (фиг. 3, а).
Это напряжение поступает на второй вход контроллера 63.
Для обеспечения симметричности символьных частот f1 и f2 относительно частоты f0 опорного генератора 67 используется система фазовой автоподстройки частоты, состоящая из опорного генератора 67, четвертого фазового детектора 68 и формирователя 69 управляющего сигнала.
Напряжение опорного генератора 67

и напряжение третьего делителя 57 фазы на два

поступают на два входа четвертого фазового детектора 68 и сравниваются по фазе (частоте). Если указанные напряжения отличаются друг от друга по фазе (частоте). Если указанные напряжения отличаются друг от друга по фазе (частоте), то на входе фазового детектора 68 образуется напряжение. Причем амплитуда и полярность этого напряжения зависит от степени и направления отклонения частоты f3=fcp от частоты f0 опорного генератора 67. Данное напряжение через формирователь 69 управляющего сигнала воздействует на гетеродин 48, изменяя его частоту fГ2 так, чтобы сохранилась симметричность символьных частот f1 и f2 относительно частоты f0 опорного генератора 68

При нарушении транспортным средством правил дорожного движения характер этого нарушения вместе с регистрационным номером транспортного средства передаются по радиоканалу на сигнальное устройство, где они и регистрируются вместе с текущим временем.
Для этого с помощью задающего генератора 35, синхронизатора 36, первого 37 и второго 39 блоков ввода дискретных сигналов, фазового манипулятора 38 и частотного манипулятора 40 формируется сложный сигнал с комбинированной фазовой и частотной манипуляцией (ФМн-ЧМн)


который поступает на первый вход смесителя 42. На второй вход последнего подается напряжение первого гетеродина 41

На выходе смесителя 42 образуется напряжение комбинационных частот. Усилителем 43 выделяется напряжение третьей промежуточной (разностной) частоты

где Vпр3=1/2Vc2∗VГ2;
fпр3=fГ2-fn(t) - третья промежуточная (разностная) частота;
φпр3=φ2-φс2.
Это напряжение после усиления в усилителе 44 мощности через дуплексер 45 поступает в приемопередающую антенну 46, излучается ею в эфир на частоте fn2(t)=fпр3(t)=fГ1, улавливается приемопередающей антенной 13 сигнального устройства 1 пункта контроля и через дуплексер 12 и усилитель 14 мощности поступает на первый вход смесителя 16, на второй вход которого подается напряжение UГ2(t) гетеродина 15. На выходе смесителя 16 образуются напряжения комбинационных частот. Усилителем 17 выделяется напряжение второй промежуточной (разностной) частоты

где Vпpu=1/2Vпр3VГ2;
fпр2(t)=fГ2(t)-fпр3(t) - вторая промежуточная (разностная) частота;
φпрu=φГ2-φпр3.
Это напряжение поступает на вход удвоителя 18 фазы, на первый вход частотного демодулятора 25, на первые входы фазовых детекторов 27 и 28.
Это напряжение представляет собой сложный ФМн-ЧМн-2 сигнал с непрерывной фазой и индексом частотной манипуляции mf=(f2-f1). τЭ=0,5. У такого сигнала символьные частоты f1 и f2 также подавлены.
При удвоении фазы принимаемого сложного ФМн-ЧМн-2 сигнала в удвоителе 18 фазы его индекс частотной манипуляции приобретает значение mf=1 и его сплошной спектр трансформируется в три дискретные составляющие на частотах 2f1, 2f2 и 2f3. С помощью блоков 19, 20 и 21 ФАПЧ осуществляется фильтрация дискретных составляющих, а делители 23, 24 и 25 фазы (частоты) на два обеспечивают соответствие частот сигналов синхронизации и принимаемого сигнала. На выходе делителей 23, 24 и 25 фазы на два образуются гармонические колебания:



которые поступают на входы частотного демодулятора 58 и фазовых детекторов 59, 60 и 61.
С выхода частотного демодулятора низкочастотное напряжение UНЧ(t) (фиг. 3, з), пропорциональное модулирующему коду M2(t) (фиг. 3, б), поступает на первый вход блока 30 регистрации. На выходе фазовых детекторов 27 и 28 образуются следующие низкочастотные напряжения соответственно:


которые суммируются в сумматоре 29

где V∑2=V9+V10.
Это напряжение поступает на первый (информационный) вход фазового детектора 26, на второй (опорный) вход которого подается гармоническое колебание U8(t) с выхода третьего делителя 24 фазы на два, на выходе фазового детектора 26 образуется низкочастотное напряжение (фиг. 3, ж)

где VH3=1/2V∑2V10;
f3-(f2+f1)/2=0,
пропорциональное модулирующему коду M1(t) (фиг. 3, а).
Это напряжение поступает на второй вход блока 30 регистрации.
Таким образом, предлагаемая система по сравнению с прототипом обеспечивает повышение эффективности и объема дискретной информации между пунктом контроля и транспортными средствами. Это достигается путем использования сложных сигналов с комбинированными видами фазовой и частотной манипуляциями.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2008 |
|
RU2371085C1 |
| КОГЕРЕНТНАЯ РАДИОЛИНИЯ | 2005 |
|
RU2286026C1 |
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2005 |
|
RU2297175C2 |
| ИНФРАКРАСНЫЙ ТРЕХСПЕКТРАЛЬНЫЙ ИЗВЕЩАТЕЛЬ ПЛАМЕНИ | 2011 |
|
RU2443023C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА И ЛЕГКИХ | 2002 |
|
RU2236169C2 |
| Устройство контроля параметров движения транспортного средства (чёрный ящик) | 2022 |
|
RU2787806C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2004 |
|
RU2271038C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 1999 |
|
RU2173889C2 |
Изобретение относится к области дорожного движения, а именно к системам соблюдения правил дорожного движения. Система содержит сигнальное устройство и исполнительное устройство. Сигнальное устройство размещено на пункте контроля, исполнительное устройство размещено на транспортном средстве, эти устройства обмениваются между собой дискретной информацией по дуплексной радиолинии. Каждое из устройств содержит задающий генератор, синхронизатор, блоки ввода дискретных сигналов, фазовый манипулятор, частотный манипулятор, гетеродины, смесители, усилители промежуточных частот, усилители мощности, дуплексер, приемопередающую антенну, удвоитель фазы, блоки фазовой автоподстройки частоты, делители фазы на два, частотный демодулятор, фазовые детекторы, сумматор, опорный генератор и формирователь управляющего сигнала. Кроме того, исполнительное устройство дополнительно содержит контроллер, блок внешней памяти, блок релейных выходов, монитор, а сигнальное устройство содержит блок регистрации. Технический результат заключается в повышении эффективности и объема передаваемой дискретной информации между пунктом контроля и транспортными средствами. 5 ил.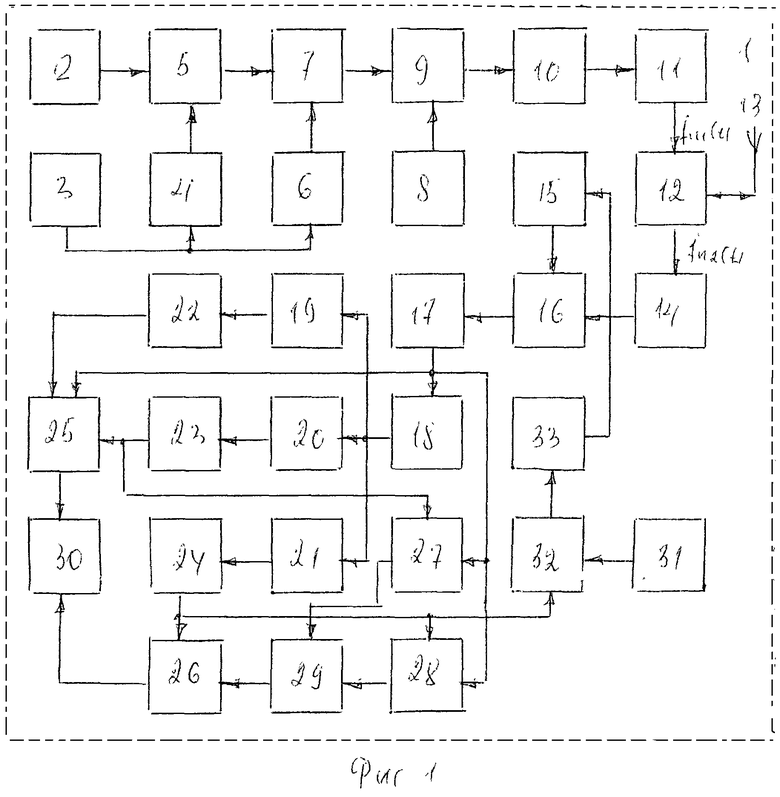
Система контроля соблюдения правил дорожного движения, в частности скоростного режима движения транспортных средств, правил проезда железнодорожных переездов, регулируемых перекрестков дорог и пешеходных переходов, требований дорожных знаков, содержащая сигнальное устройство, размещаемое на пункте контроля, и исполнительное устройство, размещаемое на транспортном средстве, обменивающиеся между собой дискретной информацией по дуплексной радиолинии, при этом сигнальное устройство содержит синхронизатор, последовательно включенные первый блок ввода дискретных сигналов и фазовый манипулятор, последовательно включенные первый смеситель, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель и усилитель второй промежуточной частоты, последовательно включенные первый фазовый детектор и блок регистрации, отличающаяся тем, что она снабжена задающим генератором, вторым блоком ввода дискретных сигналов, первым и вторым гетеродинами, удвоителем фазы, тремя блоками фазовой автоподстройки частоты, тремя делителями фазы на два, частотным демодулятором, вторым, третьим и четвертым фазовыми детекторами, опорным генератором и формирователем управляющего сигнала, причем вход первого блока ввода дискретных сигналов соединен с выходом синхронизатора, к выходу синхронизатора последовательно подключены второй блок ввода дискретных сигналов, частотный манипулятор, второй вход которого через фазовый манипулятор соединен с выходом задающего генератора, а выход подключен к первому входу первого смесителя, второй вход которого соединен с выходом первого гетеродина, к выходу усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, первый блок фазовой автоподстройки частоты, первый делитель фазы на два и частотный демодулятор, выход которого соединен с вторым входом блока регистрации, к выходу удвоителя фазы последовательно подключены второй блок фазовой автоподстройки частоты и второй делитель фазы на два, выход которого соединен с вторым входом частотного демодулятора, третий вход которого соединен с выходом усилителя второй промежуточной частоты, к выходу удвоителя фазы последовательно подключены третий блок фазовой автоподстройки частоты и третий делитель фазы на два, выход которого соединен с первым входом первого фазового детектора, к выходу усилителя второй промежуточной частоты последовательно подключены второй фазовый детектор, второй вход которого соединен с выходом второго делителя фазы на два, и сумматор, второй вход которого через третий фазовый детектор соединен с выходами усилителя второй промежуточной частоты и второго делителя фазы на два, а выход соединен с вторым входом первого фазового детектора, к выходу третьего делителя фазы на два последовательно подключены четвертый фазовый детектор, второй вход которого соединен с выходом опорного генератора, формирователь управляющего сигнала и второй гетеродин, выход которого соединен с вторым входом второго смесителя.
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2444793C1 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ НАД УЧАСТНИКАМИ ДОРОЖНОГО ДВИЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ ВОЗНИКНОВЕНИЯ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ ПРИ ДОРОЖНОМ ДВИЖЕНИИ | 2006 |
|
RU2324980C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2000 |
|
RU2185298C2 |
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2005 |
|
RU2297175C2 |

