Изобретение относится к транспортной технике и может быть использовано для предотвращения несанкционированного использования или хищения транспортных средств, например автомобилей.
Известен "Способ предотвращения угона транспортного средства" (патент РФ 2057037, В 60 R 25/04, 1992), основанный на излучении сигнала определенной частоты в направлении движущегося мимо поста автомобильной инспекции транспортного средства и формировании на последнем в случае приема излученного сигнала команды на блокировку передвижения транспортного средства. Данный способ обеспечивает задержание угнанного транспортного средства только в районе расположения поста автомобильной инспекции, т.е. его возможности территориально ограничены.
Известен также "Способ охраны транспортных средств" (патент РФ 203227, G 08 В 25/10, 1992), основанный на излучении сигнала радиопередатчиком, установленным на контролируемом транспортном средстве, приеме сигнала, не менее чем двумя радиоприемными станциями с пеленгацией транспортного средства на центральной станции с последующим поиском этого транспортного средства. При практической реализации указанного способа могут быть использованы стандартные блоки и устройства. Так, пеленгаторы, при помощи которых определяют координаты охраняемого транспортного средства после приема модулированного сигнала, могут выполняться по стандартной схеме с двумя антеннами, одна из которых имеет круговую диаграммную направленность, другая - диаграмму в виде восьмерки, расположенной в горизонтальной плоскости, при этом результирующая диаграмма имеет форму кардиоиды, что позволяет осуществлять пеленгацию по минимуму слышимости принимаемого тревожного сигнала. Однако пеленгация транспортного средства осуществляется при сравнительно низком отношении сигнал/шум, что является недостатком способа.
Для сигнализации о несанкционированном использовании транспортного средства может быть использован способ (патент РФ 2061323, В 60 R 25/10, 1993), заключающийся в том, что измеряют напряжение питания бортовой сети, фиксируют его изменения по появлению высокочастотной составляющей, обусловленной распределенной индуктивностью бортовой сети, по которой формируют контрольный сигнал.
Известен способ управления и контроля движения транспортных средств (В. Бобрин и др. Автомобильный транспорт, 1991, 12, с. 23, рис. 1), заключающийся в том, что принимают сигналы глобальной навигационной системы "Навстар" аппаратурой, установленной на транспортных средствах и диспетчерском пункте, геодезически привязанным к местности, определяют местоположение транспортных средств, обменивают информацию между диспетчерским пунктом и транспортными средствами непосредственно и/или через ретранслятор, уточняют местоположение транспортных средств путем использования дифференциальных поправок.
Известные системы и устройства для предотвращения несанкционированного использования или хищения транспортных средств основаны:
- на использовании средств звуковой сигнализации (авт. свид. 1634557, В 60 R 25/10, 1988; патенты РФ 2011575, В 60 R 25/00, 1992; 2033354, В 60 R 25/00, 1992, 2040416, В 60 R 25/00, 1993 и другие);
- на использовании кодового устройства и радиоканала, по которому передается тревожная информация (патенты РФ 2.033.352, В 60 R 25/00, 1991 и другие);
- на блокировке гидравлических приводов тормозов и сцепления с передачей тревожной информации по радиоканалу (патент РФ 2021927, В 60 R 25/00, 1992 и другие);
- на захвате угонщика с помощью транспортной пневмосистемы (патент РФ 2050294, В 60 R 21/16, 1993 и другие),
- на использовании сложных сигналов, передаваемых по радиоканалу, и пеленгации угнанного транспортного средства фазовым методом (патенты РФ 2006394, 2033353, 2042548, 2061321, 2061322, 2061323, В 60 R 25/00, 1992-1993 гг. и другие);
Однако указанные системы и устройства в основном только сигнализируют о несанкционированном использовании или хищении транспортного средства, но не обеспечивают определения местоположения угнанного транспортного средства и его задержания, т. е. имеют сравнительно низкую надежность защиты транспортных средств от угона и краж.
В качестве базового объекта следует считать способ управления и контроля движения транспортных средств (В. Бобрин и др. Радиосистемы дальней навигации. "Автомобильный транспорт", 1991, 12, с. 23, рис. 1), использующий сигналы глобальной навигационной системы "Навстар".
Данный способ позволяет проводить местоопределение угнанного транспортного средства с точностью до 100 м, а при так называемом методе дифференциальной коррекции погрешности (измерение координат относительно заведомо известной точки - диспетчерского геодезического пункта) до 2-5 м.
Недостатком данного способа является низкая эффективность защиты транспортного средства от угона и краж вследствие малой информативности об угоне транспортного средства и низкая надежность защиты. Это объясняется тем, что в известном способе отсутствует тревожный сигнал, несущий информацию о самом факте несанкционированного воздействия, о номере и марке угнанного транспортного средства, что резко снижает эффективность защиты.
Низкая надежность защиты в известном способе обусловлена отсутствием блокировки передвижения угнанного транспортного средства и оперативного задержания злоумышленников.
Задачей изобретения является повышение эффективности защиты транспортных средств от угона и краж при одновременном увеличении надежности защиты.
Поставленная задача решается тем, что согласно способу, основанному на приеме фазоманипулированного сигнала спутниковой навигационной системы "Навстар" аппаратурой, установленной на контролируемом транспортном средстве и диспетчерском пункте с известными координатами, полученными в результате прецизионной геодезической съемки, определений местоположения контролируемого транспортного средства, обмене информацией между диспетчерским пунктом и контролируемым транспортным средством по радиоканалу непосредственно и/или через ретранслятор, установленный в центральной части города, и уточнении местоположения контролируемого транспортного средства, при несанкционированном воздействии на контролируемое транспортное средство формируют тревожный фазоманипулированный сигнал с зашифрованными в нем отличительными особенностями контролируемого транспортного средства, передают его по радиоканалу на диспетчерский пункт, где фиксируют тревожный фазоманипулированный сигнал, демодулируют и декодируют его, а затем формируют и передают по радиоканалу на угнанное транспортное средство аналогичный сигнал управления на блокировку дверей угнанного транспортного средства, выключение двигателя, включение световой и звуковой сигнализации, при этом одновременно с диспетчерского пункта сообщают по радиоканалу или сотовой связи характеристики угнанного транспортного средства группам захвата, находящимся в данном районе.
Защиту транспортного средства от несанкционированного воздействия по предлагаемому способу осуществляют путем выполнения следующей последовательности операций.
1. Принимают фазоманипулированный сигнал спутниковой навигационной системы "Навстар" (фиг.1)
Uc(t) = Uc•cos[2πfct+ϕк(t)+ϕc], 0≤t≤Tс,
где Uc, fc, ϕc, Тc - амплитуда, несущая частота, начальная фаза и длительность сигнала;
ϕк(t) = {0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции фазы в соответствии с модулирующим кодом M(t) (код С/А) длиной 1023 символа, причем ϕк(t) = const при KτЭ≤t≤(K+1)τЭ и может изменяться скачком при KτЭ = t, т.е. на границах между элементарными посылками (К= 1, 2,..., N-1);
τЭ, N - длительности и количество элементарных посылок, из которых составлен сигнал длительностью ТcTc = NτЭ);
аппаратурой, установленной на контролируемом транспортном средстве и диспетчерском пункте, который геодезически привязывают к местности.
В качестве модулирующего кода M(t) (код С/А) используют псевдослучайную последовательность длительностью 1023 символа.
Глобальная навигационная система GPS (Global Positioning System), известная так же как Navstar (Navigation System with Time and Ranging - Навигационная система определения времени и дальности), предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира. В состав данной системы входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и пользовательский сегмент (навигационные приемники). Все спутники 1. j (j = 1, 2,.. . . 24) являются автономными. Параметры их орбит периодически контролируются сетью наземных станций слежения, с помощью которых не реже 1-2 раз в сутки вычисляются баллистические характеристики, регистрируются отклонения КА от расчетных траекторий движения и определяется собственное время боровых часов.
2. Определяют местоположение контролируемого транспортного средства 2. Приемник 5 GPS-сигналов последовательно захватывает и обрабатывает фазоманипулированные (ФМн) сигналы каждого спутника из выбранного созвездия. При этом приемник попеременно использует два основных режима работы - приема информации и навигационный. В навигационном режиме каждую секунду уточняется местоположение транспортного средства и выдаются основные навигационные данные. В режиме приема информации принимаются данные эфемерид и поправок времени, необходимые для навигационного режима, и производятся более редкие (через одну минуту) навигационные измерения.
Микропроцессор 8, входящий в состав бортового комплекса транспортного средства, выполняет две функции: обслуживает приемник и производит навигационные расчеты. Первая заключается в выборе рабочего созвездия спутников, вычислении данных целеуказания, хранении оценок фазы кода и несущей, синхронизации по битам, кадрам и управлении работой приемника, например переключении из режима приема информации в навигационный режим и обратно. Вторая функция микропроцессора 8 состоит в расчете эфемерид, определении координат местоположения транспортного средства и выдаче для отображения на дисплей координат места. Кроме того, микропроцессор 8 производит выбор рабочего созвездия из четырех спутников, выдает адреса С/А-кодов этих спутников и рассчитывает доплеровский сдвиг частоты ФМн-сигнала каждого спутника. Далее приемник 5 последовательно осуществляет поиск и захват сигналов спутников, работая с ними по одной минуте (всего 4 минуты на созвездие). При этом для каждого сигнала сначала производится захват С/А-кода, частоты и фазы несущей, а после синхронизации по битам и кадрам - выделение и запоминание навигационного сообщения спутника. Фаза кода, частота и фаза несущей каждого спутника также запоминаются, чтобы облегчить повторный захват сигнала при работе в последующем навигационном режиме.
Приемник 5 работает в навигационном режиме до тех пор, пока геометрия расположения спутников остается удовлетворительной или пока не устарели эфемериды. Для обновления эфемерид навигационный режим прерывается и приемник 5 вводится в повторный режим приема информации. При этом соблюдается та же последовательность операций, как и в начальном режиме, однако между переходами к следующему спутнику, т.е. каждую минуту, приемник возвращается к навигационному режиму для уточнения своего местоположения. Такой порядок чередования режимов происходит автоматически на протяжении всего времени движения транспортного средства.
Для определения двух координат места (широты и долготы) и времени необходимы измерения от трех спутников. В данном приемнике информация от четвертого "лишнего" спутника может оказаться необходимой во время различных маневров транспортного средства, когда возможно затенение сигналов одного или более спутников.
3. Обмен информацией между диспетчерским пунктом 14 и контролируемым транспортным средством 2 по радиоканалу непосредственно и/или через ретранслятор 13, установленный в центральной части города.
4. Уточняют местоположение контролируемого транспортного средства. Стандартный приемник обеспечивает время обнаружения спутника не более 3-4 минут и погрешность определения координат транспортного средства не более 100 м.
Для повышения точности определения местонахождения транспортного средства применяют метод дифференциальных поправок, который основан на использовании известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим позволяет установить координаты наблюдаемого транспортного средства с точностью до 5 м в динамической навигационной обстановке и до 2 м - в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приемника 17, установленного на диспетчерском пункте 14. Последний располагается в месте с известными координатами, в том же районе, что и основной GPS-приемник 5, установленный на транспортном средстве, и дает возможность одновременно отслеживать GPS-спутники. Сравнивая известные координаты, полученные в результате прецизионной геодезической съемки, с измеренными, контрольный GPS-приемник 17 вырабатывает поправки, которые передаются на транспортное средство по радиоканалу в заранее установленном формате. Поправки, принятые от диспетчерского пункта 14, автоматически вносятся в результаты собственных измерений транспортного средства 2.
5. При несанкционированном воздействии на контролируемое транспортное средство 2 формируют тревожный фазоманипулированный сигнал с зашифрованными в нем отличительными особенностями контролируемого транспортного средства
ui(t) = Ui•cos[2πfit+ϕKi(t)+ϕi], 0≤t≤Ti,
Каждому охраняемому транспортному средству присваивается индивидуальный код Mi(t), содержащий сведения о марке, номере, цвете транспортного средства и сведения о владельце транспортного средства.
Этим кодом манипулируется фаза сигнала. На частоте fi[ϕKi(t)] (i=1, 2,.. ., n). Следовательно, каждое контролируемое транспортное средство характеризуется определенными частотой fi и модулирующим кодом Mi(t) (i=l, 2,..., n).
6. Предают тревожный ФМн-сигнал по радиоканалу на диспетчерский пункт 14.
Принцип защиты от угона и краж транспортного средства, находящегося в движении или в статическом состоянии на стоянке, гараже или просто на улице, основан на том факте, что при несанкционированном включении зажигания, а также при открывании дверей, капота и багажника с целью хищения отдельных его элементов, включается радиоканал, по которому обеспечивается передача на диспетчерский пункт тревожного фазоманипулированного сигнала.
7. На диспетчерском пункте фиксируют тревожный сигнал, демодулируют и декодируют его, а затем формируют и передают по радиоканалу сигнал управления на блокировку дверей угнанного транспортного средства, выключение двигателя, включение световой и звуковой сигнализации.
8. На диспетчерском пункте одновременно сообщают по радиоканалу или сотовой связи характеристики угнанного транспортного средства группам захвата, находящимся в данном районе.
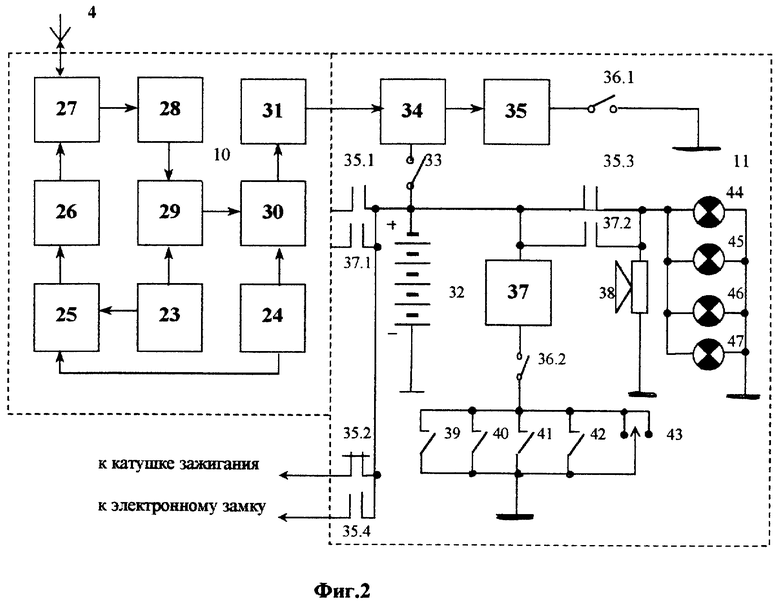
Предлагаемый способ защиты транспортного средства от угона и краж может быть реализован устройством, структурная схема которого представлена на фиг. 1. Структурная схема приемопередающего блока 10 и исполнительного блока 11 изображена на фиг.2.
Временные диаграммы, поясняющие принцип работы устройства, показаны на фиг.3.
Устройство защиты транспортного средства от угона и краж содержит спутники 1.j (j=1, 2,..., 24) навигационной системы "Навстар", транспортное средство 2, ретранслятор 13 с приемопередающей антенной 12, установленной в центральной части города, и диспетчерский пункт 14 с известными координатами, полученными в результате прецизионной геодезической съемки.
Бортовой комплекс, установленный на транспортном средстве 2, содержит последовательно включенные приемную антенну 3, приемник 5 GPS-сигналов, устройство 7 сопряжения, вход-выход которого через радиостанцию 6 соединен с приемопередающей антенной 4, и микропроцессор 8, а также датчики 9 дополнительной информации, подключенные к устройству 7 сопряжения, приемопередающий блок 10, связанный с приемопередающей антенной 4, к выходу которого подключен исполнительный блок 11.
Стационарная аппаратура, установленная на диспетчерском пункте 14, содержит последовательно включенные приемную антенну 15, приемник 17 GPS-сигналов, устройство 19 сопряжения, вход-выход которого через радиостанцию 18 соединен с приемопередающей антенной 16, персональную ЭВМ 20, соединенную с устройством 21 документации и дисплеем 22. Приемопередающий блок 10 содержит последовательно включенные генератор 23 высокой частоты, фазовый манипулятор 25, второй вход которого соединен с первым выходом генератора 24 модулирующего кода, усилитель 26 мощности, антенный переключатель 27, вход-выход которого соединен с приемопередающей антенной 4, усилитель 28 высокой частоты, фазовый детектор 29, второй вход которого соединен со вторым выходом генератора 23 высокой частоты, коррелятор 30, второй вход которого соединен со вторым выходом генератора 24 модулирующего кода, и пороговый блок 31. Исполнительный блок 11 содержит последовательно подключенные к выходу порогового блока 31 ключ 34, второй вход которого через ключ 33 зажигания соединен с плюсовой шиной аккумуляторной батареи 32, минусовая шина которой соединена с массой транспортного средства, первое реле 35, выключатель 36 и масса транспортного средства. К плюсовой шине аккумуляторной батареи 32 последовательно подключены второе реле 37, выключатель 36, параллельно включенные кнопочные выключатели дверей 39, стекол 40, багажника 41, капота 42 и маятниковый выключатель 43 и масса транспортного средства. К плюсовой шине аккумуляторной батареи 32 через замыкающие контакты 35.3 и 37.2 первого 35 и второго реле 37 подключены звуковой сигнализатор 38 и параллельно включенные сигнальные лампы 44-47, выводы которых подключены к корпусу транспортного средства. Плюсовая шина аккумуляторной батареи 32 через замыкающие первые контакты 35.1 и 37.1 первого 35 и второго реле 37 подключена к приемопередающему блоку 10, через четвертый замыкающий контакт 37.4 второго реле 37 подключена к электронному замку, который блокирует двери транспортного средства, через второй размыкающий контакт 35.2 первого реле к катушке зажигания.
Устройство защиты транспортного средства от угона и краж работает следующим образом.
При несанкционированном воздействии на охраняемое транспортное средство 2, которое выражается, например, в открывании дверей, багажника, капота, съема стекол, в буксировке транспортного средства и передвижении его своим ходом, к аккумуляторной батареи 32 подключаются обмотка первого 35 и второго реле 37. При этом кнопочные выключатели дверей 39, или стекол 40, или багажника 41, или капота 42, или маятникового выключателя 43 замыкаются. Это может произойти только в том случае, если будет замкнут выключатель 36, который находится в потайном месте, известном только владельцу транспортного средства. Последний, покидая салон транспортного средства, замыкает выключатель 36 и тем самым ставит транспортное средство под охрану. При выходе из салона транспортного средства владелец открывает дверь и включает звуковой сигнализатор 38 и сигнальные (габаритные) лампы 44-47, убеждаясь в том, что устройство охраны работоспособно.
Следовательно, при несанкционированном воздействии на транспортное средство срабатывает реле 37, замыкаются контакты 37.1 и 37.2. При этом включаются звуковой сигнализатор 38 и сигнальные (габаритные) лампы 44-47, что привлекает внимание работников милиции и окружающих.
Одновременно напряжение питания подается на приемопередающий блок 10. При этом включается высокочастотный генератор 23, который вырабатывает высокочастотное колебание (фиг.3, а)
u1(t) = U1•cos(2πf1t+ϕii), 0≤t≤T1,
которое поступает на первый вход фазового манипулятора 25, на второй вход которого подается модулирующий код M1(t) (фиг.3, б), содержащий сведения о марке, номере, цвете транспортного средства, его местонахождении и сведения о владельце транспортного средства. На выходе фазового манипулятора 25 формируется фазоманипулированный (ФМн) сигнал (фиг.3, в)
u2(t) = U1•cos(2πf1t+ϕKi(t)+ϕ1], 0≤t≤T1,
который через усилитель 26 мощности, антенный переключатель 27 и антенну 4 излучается в пространство.
Данный сигнал непосредственно или через ретранслятор 13 принимается на диспетчерском пункте 14, демодулируется и декодируется и фиксируется в электронном журнале или на электронной карте, где отображается местоположение угнанного транспортного средства и его передвижение. На диспетчерском пункте 14 формируют сигнал управления, аналогичный сигналу тревоги, т.е. имеющий ту же несущую частоту f1 и тот же модулирующий код M1(t). Следовательно, сигнал тревоги переизлучают на диспетчерском пункте 14 с помощью радиостанции 18 и антенны 16. Указанный сигнал с выхода антенны 4 через антенный переключатель 27 и усилитель 28 высокой частоты поступает на первый вход фазового детектора 29, на второй вход которого со второго выхода генератора 23 высокой частоты подается колебание U1(t) в качестве опорного напряжения. На выходе фазового детектора 29 образуется низкочастотное напряжение (фиг.3, г)
uн(t) = Uн•cosϕK1(t), 0≤t≤T1,
где Uн=1/2K1U1 2;
K1 - коэффициент передачи фазового детектора;
пропорциональное модулирующему коду M1(t) (фиг.3, б). Это напряжение поступает на первый вход коррелятора 30, на второй вход которого подается модулирующий код M1(t) со второго выхода генератора 24 модулирующего кода. Так как между напряжением Uн(t) и модулирующим кодом M(t) существует сильная корреляционная связь, то на выходе коррелятора 30 образуется напряжение, которое превышает пороговое напряжение в пороговом блоке 31. Пороговый уровень Uпop в пороговом блоке 31 выбирается таким, чтобы его могло превысить только максимальное напряжение выхода коррелятора 30. При превышении порогового уровня Uпop в пороговом блоке 31 формируется постоянное напряжение, которое поступает на управляющий вход ключа 34 и открывает его. В исходном состоянии ключ 34 всегда закрыт. При этом напряжение питанием через открытый ключ 34, замкнутый ключ 33 зажигания и замкнутые контакты 36.1 выключателя 36 поступает на обмотку реле 35. Последнее срабатывает. Данное состояние соответствует случаю, когда злоумышленник пытается угнать транспортное средство. При срабатывании реле 35 замыкаются контакты 35.1, дублируя подачу напряжения питания на приемопередающий блок 10, размыкаются контакты 35.2, выключая двигатель, замыкаются контакты 35,3, включая звуковой сигнализатор 38 и сигнальные (габаритные) лампы 44-47, замыкаются контакты 35.4, включая электронный замок, который блокирует двери транспортного средства. Это обстоятельство не позволяет быстро покинуть злоумышленнику салон угоняемого транспортного средства.
Сигнал тревоги, излучаемый диспетчерским пунктом 14 и транспортным средством 2, одновременно принимается группами захвата (подвижные средства, посты и отдельные работники милиции и ГИБДД), которые, используя световую и звуковую сигнализацию, предпринимают различные меры по задержанию злоумышленников и угнанного транспортного средства.
Таким образом, предлагаемые способ и устройство по сравнению с прототипом и другими аналогичными способами и устройствами обеспечивают повышение эффективности защиты транспортного средства от угона и краж при одновременном увеличении надежности защиты. Это достигается применением тревожного фазоманипулированного сигнала, несущего информацию о самом факте несанкционированного воздействия на транспортное средство, о номере, марке, цвете угоняемого транспортного средства и его местонахождении, а также сигнала управления, который обеспечивает выключение двигателя, включение звуковой и световой сигнализации, а также блокировку дверей. Причем включенная звуковая и световая сигнализации являются признаками обнаружения угнанного транспортного средства, а выключенный двигатель и заблокированные двери обеспечивают задержание транспортного средства и злоумышленников.
Использование стандартного оборудования современной спутниковой навигационной системы "Навстар", обеспечивающей высокоточное определение координат, скорости и времени в любом месте Земли 24 часа в сутки, позволяет надеяться на широкое использование на практике предлагаемых способа защиты транспортного средства от угона и краж и устройства для его реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2262457C1 |
| УСТРОЙСТВО ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА ОТ УГОНА И КРАЖ | 2004 |
|
RU2264934C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180293C2 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| ПРОТИВОУГОННОЕ КОДОВОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО АВТОМОБИЛЯ | 2000 |
|
RU2196060C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2005 |
|
RU2297046C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 2001 |
|
RU2196358C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2302953C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2186698C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2005 |
|
RU2303293C2 |

Изобретение относится к технике защиты транспортного средства. Устройство содержит спутники навигационной системы "Навстар", ретранслятор, а также оборудование на транспортном средстве и диспетчерском пункте. В состав оборудования входят приемные антенны, приемопередающие антенны, приемники GPS-сигналов, радиостанции, блоки сопряжения, микропроцессор, датчики дополнительной информации, приемопередающий блок, исполнительный блок, ЭВМ, устройство документации, дисплей, генератор высокой частоты, генератор модулирующего кода, фазовый манипулятор, усилитель мощности, антенный переключатель, усилитель высокой частоты, фазовый детектор, коррелятор, пороговый блок, аккумуляторная батарея, ключ зажигания, два реле, звуковой синхронизатор, кнопочные и маятниковый выключатели, сигнальные лампы. Принцип защиты транспортного средства, находящегося в движении и статическом состоянии, основан на том факте, что при несанкционированном включении зажигания, а также при открывании дверей, капота и багажника с целью хищения отдельных элементов включается радиоканал, по которому осуществляется передача на диспетчерский пункт тревожного фазоманипулированного сигнала. Устройство обеспечивает повышенные эффективность и надежность защиты транспортного средства. 3 ил.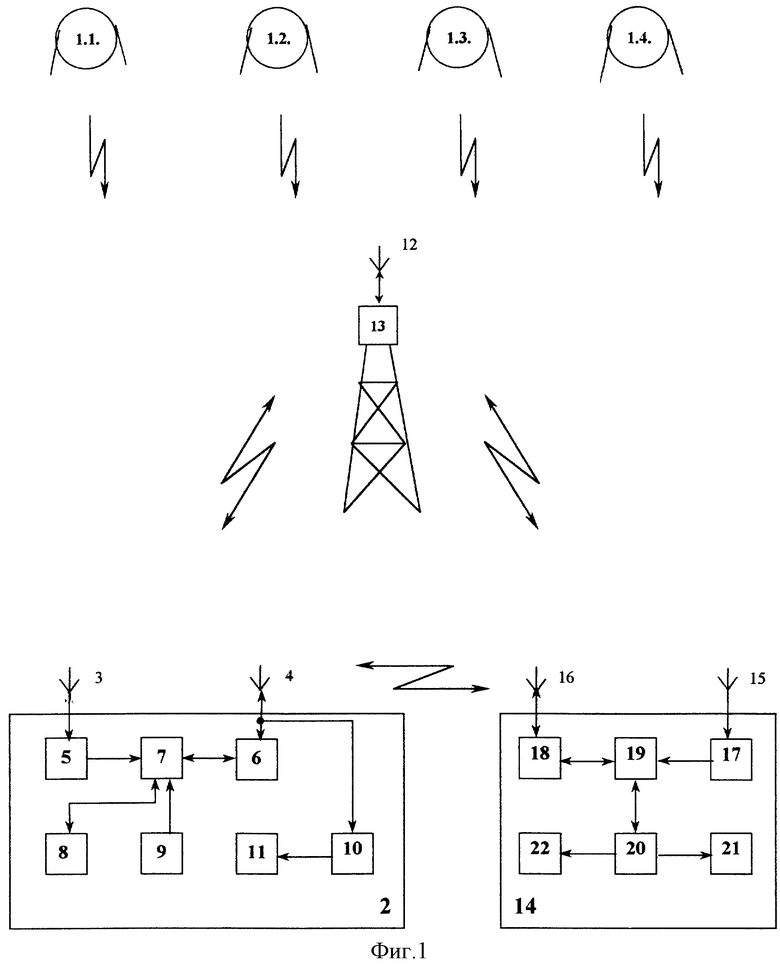
Устройство защиты транспортного средства от угона и краж, содержащее спутники навигационной системы "Навстар", бортовой комплекс, установленный на транспортном средстве и содержащий последовательно включенные приемную антенну, приемник GPS-сигналов, блок сопряжения, вход-выход которого через радиостанцию соединен с приемопередающей антенной, а также датчики дополнительной информации, подключенные к блоку сопряжения, ретранслятор с приемопередающей антенной, установленный в центральной части города, и стационарную аппаратуру, установленную на диспетчерском пункте с известными координатами, полученными в результате прецизионной геодезической съемки, и состоящую из последовательно включенных приемной антенны, приемника GPS-сигналов, блока сопряжения, вход-выход которого через радиостанцию соединен с приемопередающей антенной и персональной ЭВМ, отличающееся тем, что в него введены на транспортном средстве последовательно подключенные к приемопередающей антенне приемопередающий блок, связанный с микропроцессором, и исполнительный блок, причем приемопередающий блок содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, второй вход которого соединен с приемопередающей антенной, усилитель высокой частоты, фазовый детектор, второй вход которого соединен со вторым выходом генератора высокой частоты, коррелятор, второй вход которого соединен со вторым выходом генератора модулирующего кода, и пороговый блок, исполнительный блок содержит последовательно подключенные к выходу порогового блока ключ, второй вход которого через ключ зажигания соединен с плюсовой шиной аккумуляторной батареи, минусовая шина которой подключена к корпусу транспортного средства, обмотку первого реле, первый замыкающий контакт выключателя и корпус транспортного средства, к плюсовой шине аккумуляторной батареи подключены последовательно соединенные обмотка второго реле, второй замыкающий контакт выключателя, параллельно соединенные кнопочные выключатели дверей, стекол, багажника, капота и маятниковый выключатель, и корпус транспортного средства, последовательно соединенные параллельно включенные замыкающие третий контакт первого реле и второй контакт второго реле, звуковой сигнализатор и корпус транспортного средства, последовательно соединенные параллельно включенные замыкающие первые контакты первого и второго реле и приемопередающий блок, обеспечивая его напряжением питания, через размыкающий второй контакт первого релекатушка зажигания, через замыкающий четвертый контакт первого релеэлектронный замок, между параллельно соединенными замыкающими третьим контактом первого реле и вторым контактом второго реле и корпусом транспортного средства параллельно включены сигнальные лампы.
| ФАКТОРЫ, ДЕЙСТВУЮЩИЕ НА АКТИВНОСТЬ ФЕРМЕНТА, ВЫСВОБОЖДАЮЩЕГО РЕЦЕПТОР ФАКТОРА НЕКРОЗА ОПУХОЛЕЙ | 1999 |
|
RU2279478C2 |
| ПРОТИВОУГОННОЕ КОДОВОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО АВТОМОБИЛЯ | 1991 |
|
RU2033352C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2033353C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006394C1 |
| DE 4003280 A1, 08.08.1991 | |||
| US 5926107 А, 20.07.1999. | |||
