Изобретение относится к пассивному обнаружению движущихся в воде целей в условиях прибрежных морских областей и озер для осуществления охраны береговых сооружений и пляжей со стороны водной среды или охраны подводных сооружений, таких как проложенные под водой кабели, коллекторы, трубопроводы, а также охраны судов на якорной стоянке, морских нефтяных платформ, входов в порты, опор мостов, каналов, акваторий гидростанций от возможных нарушителей или террористов.
Известен пассивный способ обнаружения движущихся в воде целей (РФ №2488844, G01S 15/00, опубл. 27.07.2013 г.), включающий прием низкочастотных локальных колебаний давления от цели, регистрируемых в поле неоднородной волны давления, образуемой при движении цели в воде и движущейся вместе с ним, и определение местоположения обнаруженной цели и параметры ее движения по характеристикам формы регистрируемой волны давления, при этом система для осуществления этого способа содержит приемники колебаний давления, располагаемые на дне или рядом с дном и соединенные с электронным комплексом обработки данных.
Особенностью регистрируемых локальных колебаний давления является быстрый их спад с расстоянием от движущейся цели. Как правило, это расстояние не превышает несколько метров, что позволяет четко отслеживать зону локальных колебаний давления, которая образуется вокруг движущейся в воде цели, используя цепочку приемников на дне или рядом с дном, разнесенных друг от друга на расстояния, не превышающие зону локальных колебаний давления, которая образуется вокруг движущейся в воде цели.
Кроме того, для реализации способа был предложен приемник низкочастотных колебаний давления в воде (РФ №2498251, G01L 9/08, опубл. 10.11.2013 г.), содержащий основной и дополнительный чувствительные элементы, включенные параллельно друг другу с встречным направлением знаков поляризации, при этом прием сигналов осуществляется на оба чувствительных элемента, как на основной, так и на дополнительный, с одновременным вычитанием сигналов в рабочей области частот, обусловленных температурными флуктуациями в воде и смещением.
Испытания системы локации движущихся в воде целей на основе пассивного способа локации с применением цепочки указанных приемников, позволяющих исключить помехи, вызванные температурными флуктуациями в воде и смещением в рабочей области частот, показал эффективность обнаружения движущихся в воде целей пассивным способом. Однако выявился ее существенный недостаток: система удовлетворительно работает в условиях слабого поверхностного волнения, но с ростом волнения увеличивается уровень естественных помех водной среды в рабочей полосе частот от десятых долей герца до единиц герц, что не позволяет обнаруживать на этом фоне цель на ластах, движущихся со скоростью менее 1 м/с. Поэтому возникает задача компенсировать влияния помех от поверхностного волнения, оставаясь в рамках предложенного пассивного метода обнаружения целей.
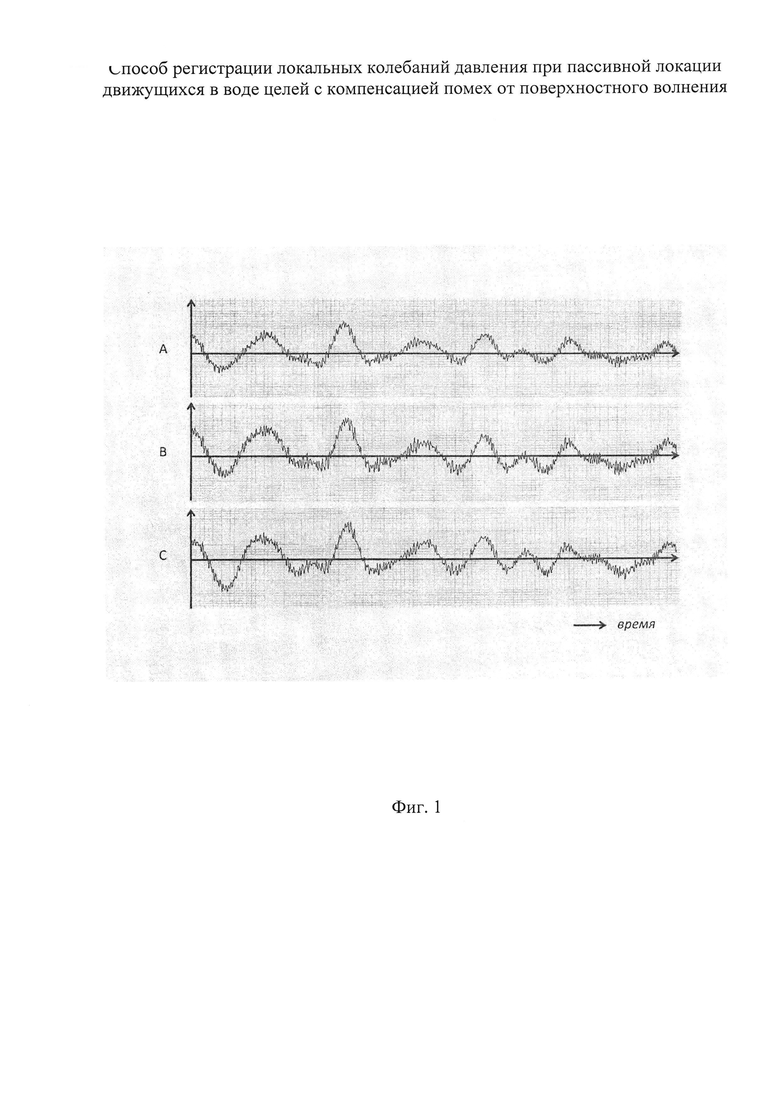
Для решения поставленной задачи были проведены исследования пространственной когерентности поля помех, вызванных волнением. С этой целью проводилась одновременная регистрация помех от волнения на несколько разнесенных друг от друга одиночных приемников на дне. На фиг. 1 представлен результат регистрации помех на приемники A, B, C, разнесенные друг от друга на расстояние 5 м. Видно, что в регистрируемых приемниками колебаниях давления от волнения наблюдается значительная их пространственная когерентность или подобие при расстояниях вдоль цепочки - 5 м для приемников А и В и 10 м для приемников А и С, что согласуется и с литературными источниками (Кадыков И.Ф. Подводный низкочастотный акустический шум океана. М.: Эдиториал УРСС, 1999, с. 50-63). Вместе с тем, для полезного сигнала от движущейся цели размер зоны локальных давлений, которая образуется вокруг движущейся в воде цели, не превышает нескольких метров. Порядок определения размера зоны локальных колебаний давления от движущихся в воде целей приведен в описании к патенту РФ на изобретение №2488844, опубл. 27.07.2013 г.
Эта разница в пространственных характеристиках полезного сигнала и помех от волнения может быть использована для снижения вклада помех от волнения в регистрируемые сигналы, принимая сигналы не на один приемник, а на два идентичных приемника в цепочке, включаемых в противофазе для взаимного вычитания помех, регистрируемых приемниками. При этом приемники в паре должны располагаться на достаточно большом расстоянии, при котором, согласно литературному источнику (Кадыков И.Ф. Подводный низкочастотный акустический шум океана. М.: Эдиториал УРСС, 1999), сохраняется высокая когерентность колебаний в поле помех, но отсутствует опасение компенсации полезного сигнала. Из упомянутого литературного источника известно, что согласно ранее проведенным исследованиям, на расстоянии в несколько сотен метров когерентность в точках приема сигналов не велика или же вовсе отсутствует. Для примера, при исследованиях на Крымском шельфе было выявлено, что при расстоянии между приемниками в 200 метров на частотах до 3 Гц когерентность в точках приема сигналов отсутствует. В то же время на расстоянии между приемниками порядка 20 метров когерентность поля помех (шумов, в том числе и волнения) остается высокой. С увеличением же расстояния до 60 метров и более, в рассматриваемой области низких частот, проявляется спад и ухудшение когерентности поля помех.
В соответствии с рассмотренными представлениями предлагаемая система регистрации локальных колебаний давления от движущихся в воде целей в условиях воздействия поверхностного волнения содержит цепочку приемников колебаний давления на кабеле, устанавливаемых на дно или рядом с дном. Приемники регистрируют как низкочастотные локальные колебания давления, возникающие при прохождении мимо приемников движущихся в воде целей, так и колебания давления, вызываемые помехами от волнения. Для снижения влияния помех от волнения на регистрацию полезных сигналов от движущихся в воде целей регистрация колебаний ведется не на отдельные приемники, а на попарно соединенные приемники в цепочке, разнесенные по цепочке на расстояние, превышающее размер зоны локальных колебаний давления, образующихся вокруг движущейся в воде цели, и выбирается таким, при котором сохраняется высокая когерентность колебаний в поле помех от волнения. При этом приемники в паре включаются в противофазе по выходу для взаимного вычитания помех от волнения. В результате помеха на выходе таких попарно связанных приемников оказывается в значительной степени скомпенсированной, а полезный сигнал остается нетронутым. Далее пары приемников на выходе соединяют с электронным комплексом обработки данных (ЭК), в котором осуществляется выделение на фоне пониженного уровня помех полезного сигнала от движущейся цели и определение по нему параметров обнаруженной цели: ее направление движения, скорость, размер, место пересечения цепочки и количество обнаруженных целей-нарушителей. ЭК может состоять из ряда соединенных между собой электронных блоков обработки данных.
Сущность предлагаемой системы регистрации локальных колебаний давления в мелководной среде при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения поясняется фигурами:
фиг. 1 - помехи от волнения на выходе трех приемников колебаний давления в цепочке;
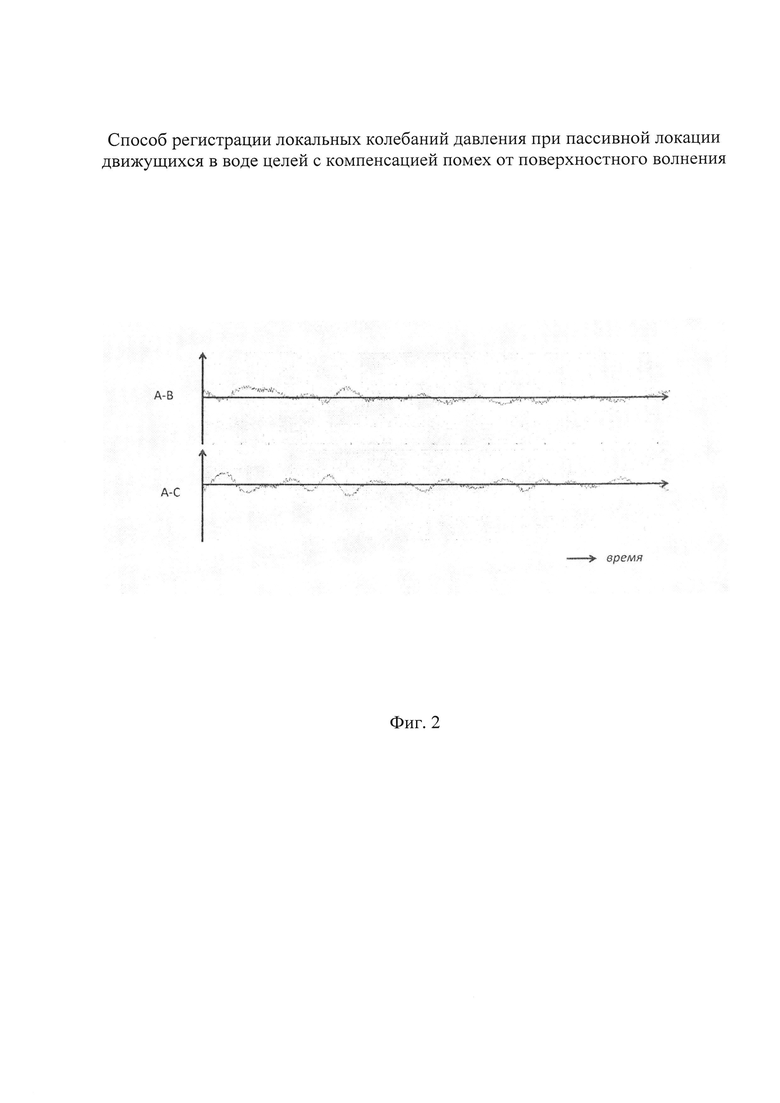
фиг. 2 - результат компенсации помех;
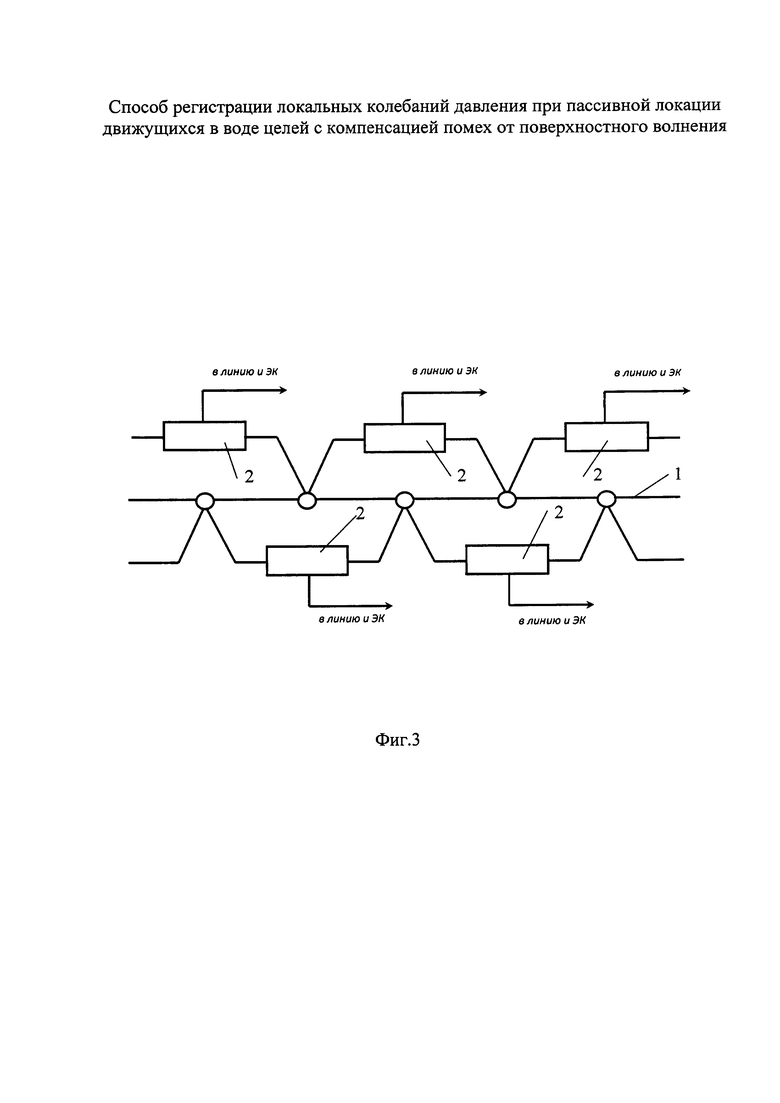
фиг. 3 - фрагмент цепочки приемников с приемом сигналов на попарно разнесенные приемники.
В основе предложенной компенсации помех лежит наблюдаемое подобие помех, или когерентность, как это видно на фиг. 1, одновременно принятых одиночными приемниками А, В и С, пространственно разнесенными по цепочке на 5 м друг от друга. Поэтому для компенсации помех по схеме их взаимного вычитания (СВ) на выходе приемников в паре достаточно противофазного включения приемников по выходу, используя для этого как аналоговые, так и цифровые методы обработки сигналов.
В качестве примера на фиг. 2 представлен результат компенсации помех от волнения на выходе СВ, принятых одновременно двумя приемниками, при разнесении приемников на 5 м (пара А-В) и на 10 м (пара А-С). При сравнении с исходными помехами, принятыми одиночными приемниками, представленными на фиг. 1, видна существенная компенсация помех, усиливающаяся с уменьшением расстояния между приемниками.
В соответствии с выбранным принципом компенсации помех на фиг. 3 показан вариант практического выполнения предложенной системы регистрации локальных колебаний давления от движущихся в воде целей цепочкой одиночных приемников (1) с компенсацией помех от поверхностного волнения. Здесь одиночные приемники в цепочке (1) пространственно разнесены на расстояние по цепочке, не превышающее размер зоны локальных давлений от движущихся в воде целей, чтобы не пропустить движущуюся цель, и попарно связаны с ближайшими приемниками в цепочке, разнесенными на большее расстояние, при котором сохраняется высокая когерентность колебаний в поле помех от волнения, через СВ (2), где происходит компенсация помех от волнения, принятых одновременно двумя пространственно разнесенными приемниками, за счет противофазного включения приемников по выходу. Далее полезные сигналы с выхода СВ (2), очищенные от помех, поступают в линию и далее в ЭК на береговом посту.
Техническим результатом настоящего изобретения является снижение влияния помех, обусловленных волнением водной поверхности при регистрации низкочастотных локальных колебаний давления от движущихся в воде целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНЫЙ МЕТОД И СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ В ВОДЕ ОБЪЕКТОВ | 2010 |
|
RU2488844C2 |
| ПРИЕМНИК НИЗКОЧАСТОТНЫХ КОЛЕБАНИЙ ДАВЛЕНИЯ В ВОДНОЙ СРЕДЕ | 2012 |
|
RU2498251C1 |
| СПОСОБ И СИСТЕМА КОМПЕНСАЦИИ МАСКИРУЮЩЕГО ВЛИЯНИЯ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ НА ОБНАРУЖЕНИЕ ПОДВОДНЫХ ЦЕЛЕЙ ПРИ ГИДРОЛОКАЦИИ | 2013 |
|
RU2548942C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ЧЕЛОВЕКА В ЗОНЕ ОХРАНЫ | 2005 |
|
RU2291493C2 |
| СПОСОБ ПАССИВНОЙ АКУСТИЧЕСКОЙ ЛОКАЦИИ ПОДВОДНЫХ ПЛОВЦОВ | 2014 |
|
RU2556302C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| СПОСОБ ГИДРОЛОКАЦИИ В МЕЛКОВОДНЫХ ОБЛАСТЯХ С ОПЕРАТИВНЫМ КОНТРОЛЕМ ИЗМЕНЧИВОСТИ УСЛОВИЙ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2017 |
|
RU2664869C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |
Изобретение относится к пассивному обнаружению движущихся в воде целей в условиях прибрежных морских областей и озер для осуществления охраны береговых сооружений и пляжей со стороны водной среды или охраны подводных сооружений, таких как проложенные под водой кабели, коллекторы, трубопроводы, а также охраны судов на якорной стоянке, морских нефтяных платформ, входов в порты, опор мостов, каналов, акваторий гидростанций от возможных нарушителей или террористов. Техническим результатом настоящего изобретения является снижение влияния помех, обусловленных волнением водной поверхности при регистрации низкочастотных локальных колебаний давления от движущихся в воде целей. Сущность: для компенсации влияния помех, обусловленных поверхностным волнением, на регистрацию полезных сигналов предложено проводить прием колебаний давления на попарно соединенные приемники в цепочке, разнесенные друг от друга на расстояние, превышающее размер зоны локальных давлений, образуемой движущейся в воде целью, при этом расстояние выбирается таким, при котором сохраняется высокая когерентность регистрируемых колебаний в поле помех от волнения, при этом приемники в паре включаются в противофазе по выходу для взаимного вычитания помех. В результате помеха на выходе попарно соединенных приемников оказывается в значительной степени скомпенсированной, а полезный сигнал остается нетронутым. Далее в электронном комплексе обработки данных осуществляется обнаружение полезных сигналов от движущихся подводных целей на фоне пониженного уровня помех и определение местоположения и параметров движения обнаруженных подводных целей. 3 ил.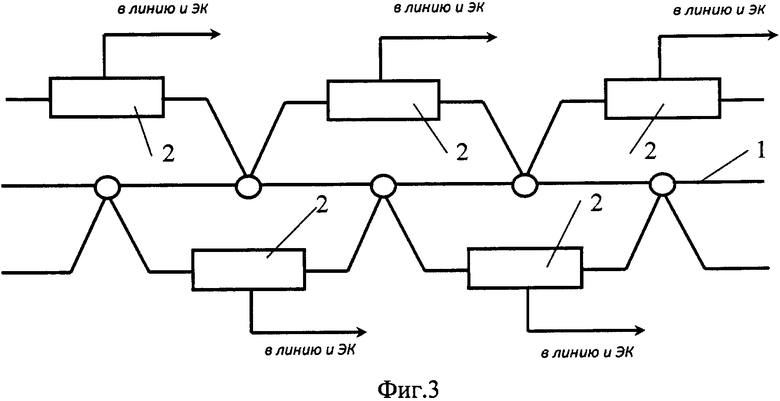
Способ регистрации локальных колебаний давления при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения, включающий прием низкочастотных сигналов локальных колебаний давления от движущихся в воде целей цепочкой одиночных приемников, уложенных на дно или рядом с дном в зонах ожидаемого появления целей, и обработку принятых сигналов, отличающийся тем, что одиночные приемники в цепочке пространственно разносят по цепочке на расстояния, не превышающие размер зоны локальных колебаний давлений от движущихся в воде целей, чтобы не пропустить движущуюся цель, и попарно связывают с приемниками в цепочке, разнесенными на большее расстояние, при котором сохраняется высокая когерентность колебаний в поле помех от волнения, при этом приемники в паре включают в противофазе по выходу для взаимной компенсации помех от волнения и направляют очищенный от помех сигнал в электронный комплекс обработки данных, в котором по принятому сигналу обнаруживают движущуюся цель и определяют ее местоположение и параметры движения.
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКИХ ОБЪЕКТОВ | 2008 |
|
RU2373553C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| RU2012111893 A, 10.05.2014 | |||
| Способ получения 4-метиламиноантипирина | 1960 |
|
SU137921A1 |
| УСТРОЙСТВО ДЛЯ ОХРАНЫ ВОДНЫХ РУБЕЖЕЙ | 2008 |
|
RU2375755C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| US5237541 A, 17.08.1993 | |||
| US5235558 A, 10.08.1993. | |||

