Изобретение относится к способам обнаружения движущихся в воде объектов в условиях мелководья, таких как прибрежные морские области, речные русла, каналы, озера.
Предложенный метод и система могут быть использованы при проведении подводных работ в мелководных областях, при поисковых и спасательных работах, осуществлении охраны береговых сооружений и пляжей со стороны водной среды или охраны подводных сооружений, таких как проложенные под водой кабели, коллекторы, трубопроводы, а также охраны судов на якорной стоянке, морских нефтяных платформ, входов в порты, опор мостов, каналов, акваторий гидростанций от возможных нарушителей или террористов.
Недостатком традиционных активных методов гидролокации для целей охраны в условиях мелководья, например в прибрежных областях, где глубина не превышает нескольких метров, является малая дальность обнаружения подводных объектов. Ограничение по дальности обусловлено резким спадом с расстоянием в воде энергии прямого и отраженного от объекта зондирующего сигнала в условиях мелководья из-за касаний звуковыми лучами дна и водной поверхности, что приводит к их рассеянию и поглощению на сравнительно близких расстояниях от излучателя, а также к возникновению большого уровня реверберационных помех. Единственная возможность использования традиционных активных методов в условиях мелководья - это наращивание числа гидролокаторов для увеличения протяженности охраняемого рубежа, однако это обходится слишком дорого и оказывается малоэффективным.
Известен пассивный метод обнаружения движущихся подводных объектов, обладающих собственным акустическим излучением, например описанный в патенте Японии №JP6027799. Указанный принцип обнаружения по шуму, излучаемому целью, использован в системе мониторинга водной среды АРГУС ФГУП «НИИ «Атолл». Однако необходимое условие - цель должна быть излучающей - является существенным недостатком метода, поскольку не все цели являются источником излучения.
Другим известным пассивным методом обнаружения движущихся целей на мелководье является так называемый магнитометрический метод, в основе которого лежит реакция на наличие у пловца-нарушителя железосодержащих материалов. Примером магнитометрической системы является изделие НЕПТУН ГУП «Дедал». Кроме слабой чувствительности метода, ограничивающей зону действия расстоянием 2-3 м из-за резкого спада сигнала с расстоянием как r-6, основным недостатком метода является реакция только на железосодержащие материалы, поскольку такие материалы у пловца могут отсутствовать. Кроме того, устройства охраны на основе магнитометрики весьма громоздки, их сложно устанавливать на дно и они легко обнаруживаются нарушителем.
Известен также пассивно-активный так называемый «теневой», или «просветный» метод обнаружения объектов под водой, в котором объект обнаруживается при пересечении звукового луча, падающего от излучателя на приемник (патент США №US4932009). С той же целью источником излучения может служить окружающий естественный шум водной среды, поступающий на донный приемник с водной поверхности (патент РФ №RU2177626 и патент США №US3893061) или шум от окружающего удаленного судоходства (патент РФ №RU2097786).
Принципиальным недостатком метода является сложность создания условий для эффективного обнаружения объекта из-за мешающего влияния дифракционных эффектов и рефракции звука в реальной водной среде, сглаживающих или сводящих на нет картину затенения уже на сравнительно небольших расстояниях от объекта, особенно на низких частотах, характерных для естественного шума водной среды и шума окружающего судоходства. Эти источники излучения, кроме того, распределены по пространству, что не позволяет идентифицировать направление прихода от них звуковых лучей.
Задача, на решение которой направлено предложенное изобретение, заключается в создании способа и системы с простой реализацией и расширенной областью применения, позволяющих эффективно обнаруживать движущиеся в водной толще объекты, например пловцов на ластах или на средствах движения, а также автоматически управляемых технических аппаратов, и определять их местоположение в сложных условиях мелководных областей, независимо от наличия или отсутствия собственного акустического излучения объектов и наличия у них железосодержащих материалов.
Для решения поставленной задачи предложен способ обнаружения объектов, движущихся в водной среде, и определения их местоположения, заключающийся в регистрации колебаний давления в поле неоднородной волны давления в воде, возбуждаемой движущемся в воде телом. Особенностью этих волн является быстрый спад давления с расстоянием от движущегося тела, что позволяет четко отслеживать зону локальных давлений, которая образуется вокруг движущегося в воде тела.
Предложенный способ экспериментально и теоретически обоснован.
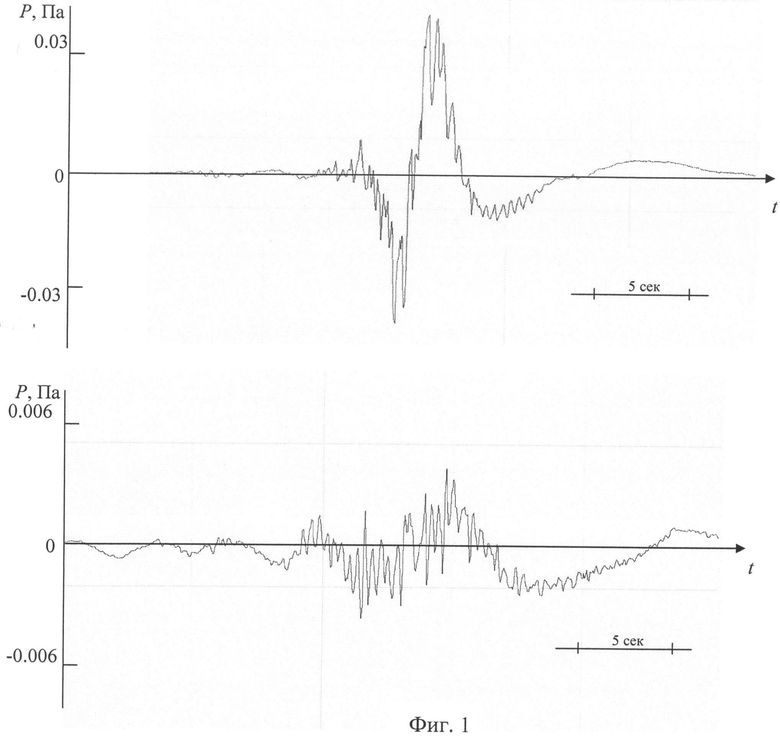
Регистрируемая неподвижным приемником давления характерная форма сигнала от движущегося в воде пловца на ластах представлена на фиг.1.
Видно, что сигнал состоит из низкочастотной составляющей, представляющей неоднородную волну давления от движущегося тела, на которую наложены сравнительно высокочастотные колебания, обусловленные импульсной работой ласт. Такой же по форме сигнал регистрируется и от движущихся в воде автоматически управляемых технических аппаратов, у которых высокочастотная составляющая обусловлена работой винтового движителя.
Регистрируемая низкочастотная составляющая представляет чередующиеся максимумы и минимумы давления, обусловленные соответственно уплотнением и разрежением водной среды по линии движения пловца. В соответствие с физикой обтекания активно движущегося тела начальный резкий спад давления соответствует области пониженного давления перед движущимся телом, образующейся за счет оттока водной среды из этой области в зону за телом при работе движителя. При этом понижение давления перед телом частично компенсируется возникающим перед движущимся телом сжатием водной среды, вызванным скоростным напором. В зоне за телом за счет работы движителя создается сила, движущая тело, и соответственно, в этой области образуется область повышенного давления. В более дальней зоне за пловцом, в так называемом спутном потоке, образуется ряд затухающих минимумов и максимумов давления, вызываемых турбулентным обтеканием тела.
При теоретическом рассмотрении процесса обтекания движущегося в воде тела и возникновения при этом поля неоднородной волны давления, сопровождающей тело, необходимо рассмотреть состав независимых исходных физических параметров, которыми определяется процесс обтекания:
p - давление в поле неоднородной волны;
ρ - плотность воды;
U - скорость потока;
L - характерный продольный линейный размер движущегося тела;
µ - динамическая вязкость воды;
r - расстояние от движущегося тела до точки наблюдения;
t - текущее время.
Исходя из размерностей выбранных параметров, можно составить их безразмерные комбинации:




которые являются переменными величинами, определяющими взаимосвязи исходных физических параметров в наблюдаемом процессе образования неоднородной волны давления.
Так, из первой безразмерной комбинации следует, что p зависит от U как p~1,5. Найденная теоретически зависимость р от U действительно согласуется с экспериментальными данными на фиг.1, где регистрация поля неоднородной волны давления движущимся в воде пловцом представлена для двух скоростей движения пловца - 2 м/с (верхняя кривая) и 1 м/с (нижняя кривая).
Вторая безразмерная комбинация,
Из всех перечисленных безразмерных комбинаций для определения скорости движения обнаруженного тела по регистрируемой от него неоднородной волне давления наиболее подходит безразмерная комбинация
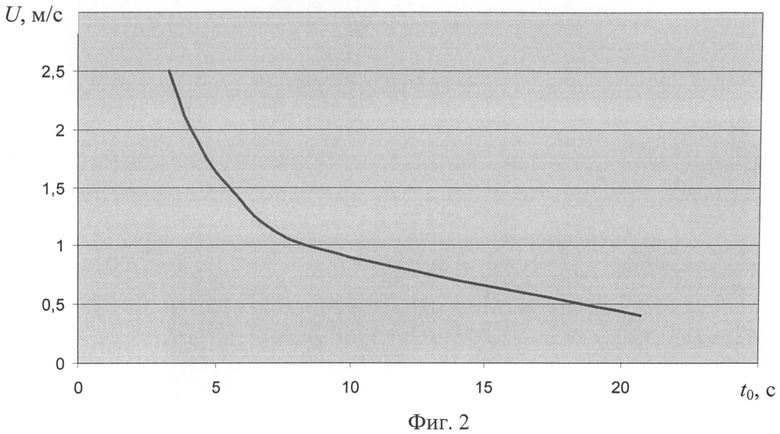
U=4,6L/to.
Задавая здесь размер пловца L=1,8 м, связь наблюдаемых значений to со скоростью пловца U в диапазоне возможных значений скоростей 0,4-3 м/с будет иметь вид, представленный на графике фиг.2.
В соответствии с интерпретацией наблюдаемой области колебаний давления, которая сопровождает пловца, состоящей из нескольких чередующихся максимумов и минимумов давления в волне, общий размер области, занимаемой волной в продольном направлении, определяется отрезком безразмерной координаты
При осуществлении способа в мелководных зонах, где традиционные методы активной гидролокации малоэффективны или вообще не работают, прием колебаний неоднородной волны давления от движущегося в воде объекта ведут на приемник или на цепочку приемников давления в плоскости дна с известными координатами, пространственно разнесенных и располагаемых в зонах ожидаемого появления движущегося в воде объекта. Местоположение движущегося объекта определяют относительно обнаруживших его приемников при известном их положении на дне.
В соответствие с рассмотренными представлениями система для осуществления способа содержит приемник колебаний давления или цепочку приемников колебаний давления на кабеле, устанавливаемых на дно или рядом с дном и регистрирующих низкочастотные колебания давления, возникающие при прохождении мимо приемников неоднородной волны давления, которая вызывается движущимся в воде объектом и сопровождает его. Приемники соединяются с электронным комплексом обработки данных, в котором осуществляется выделение на фоне помех сигнала от цели, принятого одним или несколькими приемниками в цепочке, и определение по нему параметров обнаруженной цели: ее направление движения, скорость, размер, место нарушения и количество обнаруженных объектов. Электронный комплекс обработки данных может состоять из ряда соединенных между собой электронных блоков обработки данных.
Система предназначена для пассивного контроля некоторого достаточно протяженного рубежа, занимаемого цепочкой приемников, и может быть использована для охраны подводных, надводных и береговых сооружений со стороны мелководной среды - везде, где активная гидролокация малоэффективна. Регистрация сигнала приемниками системы свидетельствует о пересечении линии рубежа движущимся объектом.
Из проводимой оценки поперечного размера волны давления следует, что при движении пловца между приемниками в цепочке его обнаружение по крайней мере одним из приемников будет обеспечиваться при расстоянии между соседними приемники в цепочке не более 10 м. То же условие приводит к тому, что использование метода ограничивается сравнительно небольшими глубинами, не более 5-10 м, при укладке приемников на дно.
Особенностью системы является низкочастотный характер регистрируемых колебаний давления. Как видно из фиг.1, при движении пловца на ластах с типичной скоростью 2 м/с длительность области максимума в волне составляет около 3 с, что эквивалентно частотам в области 0,15 Гц. При уменьшении скорости пловца длительность области максимума пропорционально увеличивается, то есть частота уменьшается. Эти оценки определяют требования к частотному диапазону регистрирующей аппаратуры в соответствии с диапазоном скоростей обнаруживаемых подводных объектов. Они важны также для учета работы аппаратуры в условиях естественного шума водной среды на мелководье, спектр которого имеет резко выраженный подъем в области частот примерно 0,3 Гц, обусловленный волнением водной поверхности, течениями, а также температурными флуктуациями водной среды. Однако, благоприятным обстоятельством является тот факт, что на более низких частотах, чем 0,3 Гц, соответствующих меньшим скоростям движения пловца и, соответственно, меньшим амплитудам сигнала от сопровождающей его волны, наблюдается резкое уменьшение естественного шума водной среды (см. И.Ф.Кадыков. Подводный низкочастотный акустический шум океана. М.: Эдиториал УРСС, 1999. - 152 с.)
Рассмотренные варианты практического выполнения предложенного способа достаточно просты в изготовлении и малы по стоимости и, вместе с тем, более эффективны по сравнению с решением аналогичных задач по охране рубежа активными средствами, которые упоминались выше, а также по сравнению с малочувствительной магнитометрической системой, обязательным условием работы которой является наличие у обнаруживаемого объекта железосодержащих предметов.
Каждый из признаков, включенных в формулу изобретения, необходим, а все вместе они достаточны для достижения поставленной цели, то есть в формулу изобретения включены существенные признаки.
Предпосылкой возможности осуществления данного способа являются рассмотренные выше физические процессы, сопровождающие регистрацию низкочастотных колебаний давления, используемых в методе. При этом заявленная возможность определения параметров цели, таких как ее размер и скорость движения, следует из характеристик формы регистрируемой волны, которая, как было показано выше, определяется скоростью движения обнаруженного подводного объекта и его размером.
Сущность заявленного способа и системы охраны поясняется рисунками:
фиг.1 - форма регистрируемой неоднородной волны давления при движении пловца на ластах;
фиг.2 - взаимосвязь скорости пловца с длительностью области максимума to в регистрируемом сигнале на его пересечении с осью времени;
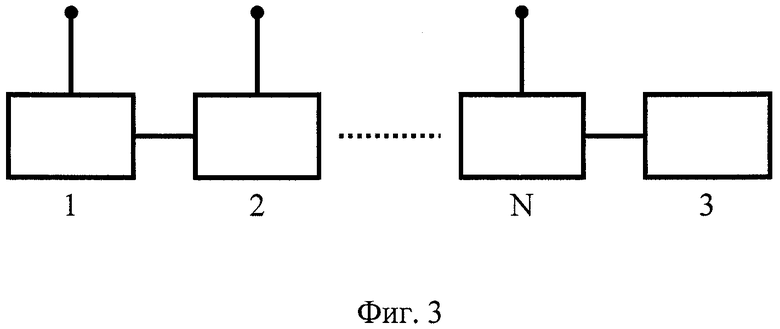
фиг.3 - структура системы обнаружения движущихся в воде объектов;
фиг.4 - структура приемника;
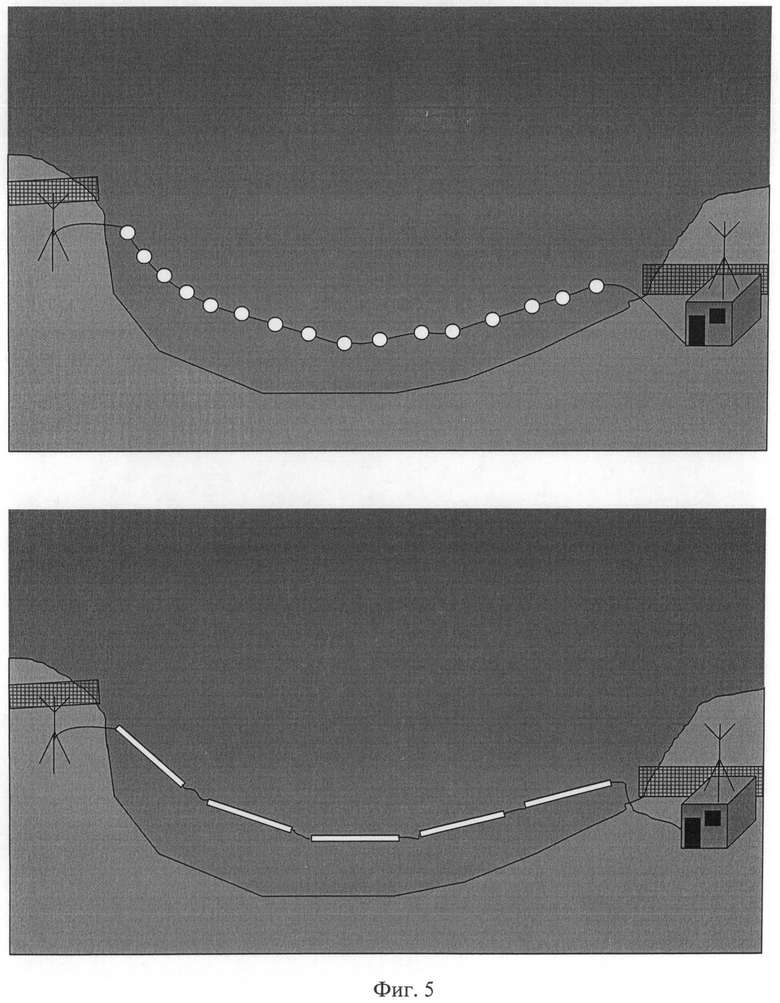
фиг.5 - варианты практического выполнения системы обнаружения объекта в водной среде с приемниками давления, установленными на дне или рядом с дном.
В основе предлагаемого способа лежит возможность обнаружения движущегося в воде объекта путем регистрации неподвижным приемником возбуждаемых объектом колебаний давления в воде в виде неоднородной волны давления в водной среде. При этом приемники, регистрирующие колебания давления, должны располагаться достаточно близко от движущегося в воде объекта из-за быстрого спада давления в поле неоднородной волны с увеличением расстояния до тела. Возможность определения по характеристикам регистрируемого сигнала таких параметров подводного объекта, как его местоположение относительно приемников на дне, размера обнаруженного объекта и скорости его движения, следует из выявленной зависимости характеристик регистрируемого сигнала от указанных параметров объекта и технической возможности регистрировать указанные низкочастотные сигналы в условиях возможных помех.
Предложенные способ и система охраны на его основе осуществляются в соответствии со структурной схемой системы обнаружения движущихся в воде объектов, приведенной на фиг.3. Она включает следующие элементы:
1, 2, …, N - цепочка из приемников колебаний давления на кабеле в воде; 3 - электронный комплекс обработки данных, поступающих с приемников.
В соответствии с этой схемой в зоне наблюдений в воде, обычно это мелководная зона, устанавливают на дно или рядом с дном цепочку из N приемников колебаний давления и для каждого из них при установке определяются координаты их местоположения. Принятые одним из приемников или несколькими приемниками сигналы колебаний давления от движущихся подводных объектов, пересекших линию рубежа, передаются вместе с номерами обнаруживших их блоков по кабельной линии связи в электронный комплекс обработки данных 3, где по принятым сигналам и номерам обнаруживших их приемников определяются параметры обнаруженного объекта - место пересечения им рубежа и скорость его движения, а также оценивается количество обнаруженных объектов.
В каждом из приемников осуществляется прием колебаний давления и проводится необходимая предварительная обработка принятых сигналов для передачи их в линию связи, например их фильтрация на фоне шумов водной среды, усиление и перевод их из аналоговой формы в цифровую.
Кроме того, предварительная обработка принятых сигналов в приемниках позволяет существенно снизить объем передачи данных по общей линии. Действительно, в связи с малым поперечным пространственным размером волны давления от движущегося объекта, в системе охраны, состоящей из большого числа независимых приемников, например порядка 100, одновременное поступление сигналов ожидается лишь от одного или от нескольких приемников, что позволяет, используя установленную в приемниках логику, передавать по линии сигнал или данные об объекте только от приемника, зарегистрировавшего сигнал.
В основе логики, вырабатывающей команду на передачу данных от приемника в линию, может быть положен принцип превышения регистрируемыми сигналами текущего шумового фона водной среды в рабочем диапазоне частот.
В соответствии с рассмотренными принципами на фиг.4 представлен вариант структуры приемника, который включает следующие основные элементы:
4 - первичный преобразователь, чувствительный к колебаниям давления в воде;
5 - усилитель аналогового сигнала с выхода первичного преобразователя в рабочем диапазоне частот;
6 - преобразователь аналогового сигнала на выходе усилителя в цифровую форму;
7 - оперативная память регистрируемых сигналов;
8 - таймер, вырабатывающий метки времени;
9 - измеритель уровня фона естественного шума водной среды;
10 - схема «или» по превышению регистрируемыми сигналами уровня фона естественного шума водной среды.
В соответствии с этой структурой алгоритм работы приемника и системы охраны в целом состоит в следующем:
- колебания давления, регистрируемые первичным преобразователем 4 в рабочей полосе частот, усиливаются усилителем 5, преобразуются в 6 из аналоговой формы в последовательный цифровой код и оперативно запоминаются в 7 вместе с метками времени, вырабатываемыми таймером 8;
- одновременно производится формирование команды на передачу данных из оперативной памяти в линию путем проведения следующих операций: автоматическое установление на выходе 9 усредненного уровня фона естественного шума на выходе 6 и сравнение в 10 регистрируемых сигналов на выходе 6 с усредненным уровнем фона;
- при превышении регистрируемыми сигналами уровней фона схема 10 (схема «или») вырабатывает команду на передачу зарегистрированных сигналов из оперативной памяти в линию вместе с номером приемника и временем регистрации;
- передача данных по линии связи из оперативной памяти в виде последовательных посылок в соответствие с выбранным протоколом обмена и формированием общего цифрового канала передачи данных от первичных преобразователей.
Рассмотренная структура приемников допускает и существенное упрощение алгоритма работы, учитывая низкочастотный характер регистрируемых сигналов, что позволяет непрерывно передавать данные в линию последовательно со всех приемников и проводить их обработку в электронном комплексе обработки данных.
В качестве практического выполнения системы на фиг.5 представлена система охраны мелководной прибрежной области цепочкой приемников колебаний давления, проложенной по дну (верхний рисунок), и вариант системы, в котором отдельные приемники в цепочке объединены в группы или прием осуществляется распределенными чувствительными элементами, вытянутыми вдоль линии рубежа (нижний рисунок).
При оценке необходимой погрешности определения местоположения обнаруженного объекта при практическом выполнении системы на рис.5 необходимо исходить из того, что наименьшей она может быть только в том случае, когда объект обнаруживается одновременно несколькими соседними приемниками, минимум двумя. В этом случае можно оценить величину его смещения между соседними приемниками. Если же объект обнаруживается только одним приемником, не может быть выполнена необходимая поправка на смещение объекта относительно обнаружившего его приемника и местоположение объекта считается совпадающим с местоположением обнаружившего его приемника.
Заметим, однако, что в реальных условиях, когда большой точности определения местоположения пересечения объектом охраняемого рубежа не требуется, а более важным является сам факт пересечения рубежа, отдельные приемники в цепочке могут быть объединены в группы или, более того, прием осуществлять распределенными чувствительными элементами, вытянутыми вдоль линии рубежа. В этом случае погрешность определения места пересечения рубежа будет определяться длинами объединенных или распределенных чувствительных элементов.
Техническим результатом настоящего изобретения является осуществление оперативного обнаружения движущихся в мелководной среде объектов, определение их местоположения и параметров движения.
Использование: для организации в условиях мелководья рубежной системы охраны подводных сооружений или сооружений на берегу со стороны водной среды от подводных пловцов-нарушителей или от других движущихся в воде объектов. Сущность: с помощью системы обнаружения регистрируются колебания давления в поле неоднородной волны давления, образуемой при движении объекта в воде и движущейся вместе с ним, при этом местоположение обнаруженного объекта и параметры его движения определяют по характеристикам формы регистрируемой волны давления. Система для осуществления пассивного метода обнаружения движущихся в воде объектов содержит приемники колебаний давления 1, 2, …, N, которые соединены с электронным комплексом обработки данных 3. Технический результат: оперативное обнаружение движущихся в мелководной среде объектов, определение их местоположения и параметров движения. 2 н. и 5 з.п. ф-лы, 5 ил.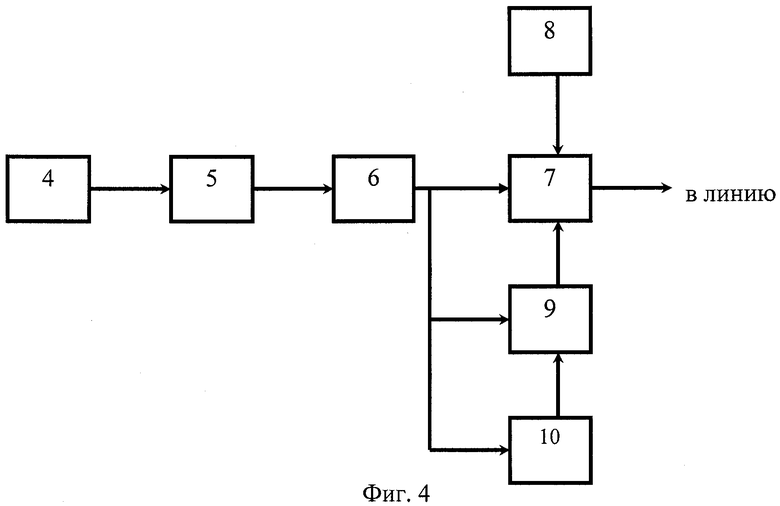
1. Пассивный метод обнаружения движущихся в воде объектов, включающий прием от объекта сигналов колебаний давления, отличающийся тем, что регистрируются колебания давления в поле неоднородной волны давления, образуемой при движении объекта в воде и движущейся вместе с ним, при этом местоположение обнаруженного объекта и параметры его движения определяют по характеристикам формы регистрируемой волны давления.
2. Система для осуществления способа по п.1, содержащая приемники колебаний давления, которые соединяют с электронным комплексом обработки данных.
3. Система по п.2, отличающаяся тем, что прием сигналов ведут на приемники в плоскости дна с известными координатами, располагаемые в зонах ожидаемого появления объектов.
4. Система по п.2, отличающаяся тем, что приемники содержат первичный преобразователь, чувствительный к колебаниям давления в воде, усилитель и полосовой фильтр аналогового сигнала с выхода первичного преобразователя, преобразователь аналогового сигнала на выходе усилителя в цифровую форму, оперативную память регистрируемых сигналов, схему «или» по превышению регистрируемыми сигналами уровней фона естественного шума водной среды.
5. Система по п.2, отличающаяся тем, что сигналы передаются в электронный комплекс обработки данных только от приемников, зарегистрировавших сигнал.
6. Система по п.2, отличающаяся тем, что сигналы передаются непрерывно в электронный комплекс обработки данных последовательно со всех приемников.
7. Система по п.2, отличающаяся тем, что электронный комплекс обработки данных состоит из ряда соединенных между собой электронных блоков приема, обработки и представления данных.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ЦЕЛИ | 1968 |
|
SU1840056A1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ В РЕЖИМЕ ШУМОПЕЛЕНГОВАНИЯ | 1977 |
|
SU1840066A1 |
| KR 20040041322 A, 17.05.2004 | |||
| JP 4370781 A, 24.12.1992. | |||

