Изобретение относится к космической технике и может быть использовано для управления ориентацией космического аппарата (КА) при выполнении экспериментов и исследований.
Известен способ управления ориентацией КА, включающий выставку осей аппарата и поддержание углового положения с помощью двигателей ориентации [1] Алексеев К.Б., Бебенин Г.Г. «Управление космическими летательными аппаратами», М.: Машиностроение, 1974.
Однако для использования данного способа необходимо расходовать рабочее тело, что приводит, кроме того, к загрязнению оптических поверхностей КА и вызывает микроускорения на борту КА.
Наиболее близким к предлагаемому, прототипом, является способ, включающий закрутку КА вокруг оси КА, соответствующей минимальному или максимальному моменту инерции [2] Беляев М.Ю. «Научные эксперименты на космических кораблях и орбитальных станциях», М.: Машиностроение, 1984.
Данный способ используется для КА, имеющих вытянутую форму, т.е. когда момент инерции относительно продольной оси значительно (в 7 и более раз) меньше максимального момента инерции относительно поперечной оси.
В этом случае обеспечивается ориентация оси КА, вокруг которой осуществляется закрутка и не требуется для ее поддержания расхода рабочего тела и, следовательно, при этом не загрязняются оптические поверхности КА и не возникают ускорения из-за работы двигателей управления ориентацией.
Однако при проведении экспериментов с научной аппаратурой (НА) по изучению конвекции данный способ управления ориентацией не всегда может быть использован. Это связано с тем, что при изучении конвекции возникает задача по исследованию влияния микроперегрузок на процесс конвекции. Выполняемая же закрутка КА не обеспечивает изменения уровня микроперегрузок на КА.
Техническим результатом предлагаемого способа является обеспечение возможности изучения влияния уровня микроускорений на процесс конвекции при управлении ориентацией КА в процессе выполнения экспериментов.
Технический результат достигается тем, что в способе управления ориентацией космического аппарата при проведении экспериментов с научной аппаратурой по изучению конвекции, включающем закрутку космического аппарата, в отличие от известного измеряют расстояние от научной аппаратуры до оси закрутки, в процессе закрутки космического аппарата измеряют и фиксируют температуру в научной аппаратуре по изучению конвекции и угловую скорость космического аппарата, и изменяют скорость закрутки космического аппарата с учетом изменения измеряемых параметров.
Запишем уравнения вращательного движения КА.
КА считается твердым телом. Для записи уравнений движения корабля относительно центра масс и соотношений, используемых при обработке данных измерений, вводятся три правые декартовы системы координат. Строительная система Oy1y2y3 жестко связана с корпусом КА. Точка О - центр масс КА (корабль «Прогресс»), ось Oy1 параллельна его продольной оси и направлена от стыковочного узла к агрегатному отсеку, ось Oy2 перпендикулярна плоскости солнечных батарей (СБ). В этой системе интерпретируются данные измерений угловой скорости. Светочувствительная сторона СБ обращена к полупространству y2>0. Система Ox1x2x3 образована главными центральными осями инерции КА. Оси Oxi составляют малые углы с осями Oyi (i=1, 2, 3). Система CY1Y2Y3 близка второй геоэкваториальной системе координат эпохи даты. Ее начало находится в центре масс Земли, плоскость CY1Y2 совпадает с плоскостью экватора, ось CY3 направлена в северный полюс мира, ось CY1 направлена приблизительно в точку весеннего равноденствия - повернута от плоскости гринвичского меридиана на среднее звездное время против вращения Земли. В системе CY1Y2Y3 задаются двухстрочные элементы NORAD, которые использованы для задания орбитального движения КА. Эту систему CY1Y2Y3 считаем инерциальной.
Положение системы Ox1x2x3 относительно системы Oy1y2y3 будем задавать углами γ, α и β, которые введем посредством следующего условия. Система Oy1y2y3 может быть переведена в систему Ox1x2x3 тремя последовательными поворотами: 1) на угол α вокруг оси Oy2, 2) на угол β вокруг новой оси Oy3, 3) на угол γ вокруг новой оси Oy1, совпадающей с осью Ox1. Матрицу перехода от системы Ox1x2x3 к системе Oy1y2y3 обозначим 

Матрицу перехода от системы Ox1x2x3 к системе CY1Y2Y3 обозначим 
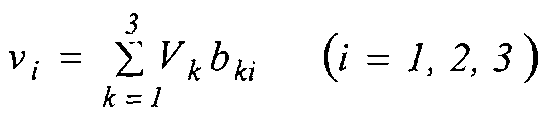
Уравнения движения КА относительно центра масс образованы динамическими уравнениями Эйлера для компонент ωi угловой скорости КА в системе Ox1x2x3 и кинематическими уравнениями Пуассона для первой и второй строк матрицы 
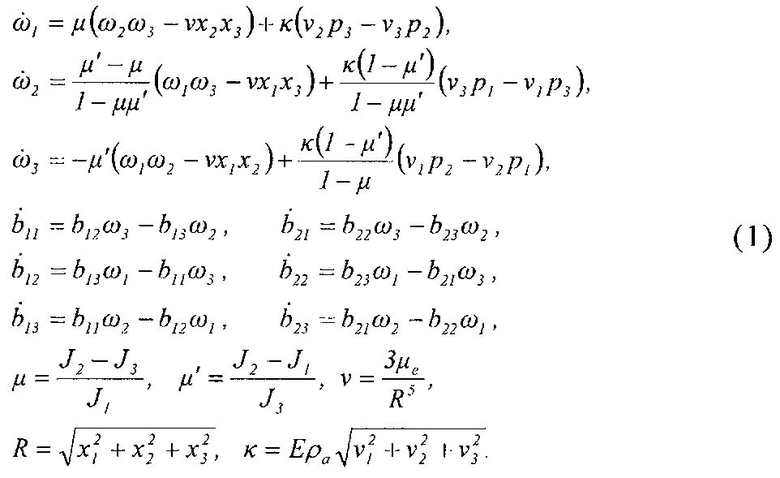
Здесь xi и νi - компоненты в системе Ox1x2x3 геоцентрического радиус-вектора точки O и скорости этой точки относительно поверхности Земли, pi - параметры аэродинамического момента, Ji - моменты инерции спутника относительно осей Oxi, µe - гравитационный параметр Земли, ρa - плотность атмосферы в точке O (рассчитывается согласно модели ГОСТ Р 25645.166-2004), E - масштабирующий множитель.
При численном интегрировании уравнений (1) единицами измерения времени и длины служат 1000 с и 1000 км, единицы измерения других величин: [νi]=км/с, [ωi]=10-3 с-1, [pi]=см/кг, [pa]=кг/м3, E=1010. Третья строка матрицы
 ,
,  ,
,
где
координаты 



Параметры µ, µ′ в уравнениях (1), а также углы γ, α, β можно считать заданными: их проектные значения µ=0.14, µ′=0.87, γ=α=β=0. Однако ниже эти величины и параметры pi определяются из обработки данных измерений наряду с неизвестными начальными условиями движения КА, т.е. служат параметрами согласования.
Полученные уравнения (1) позволяют оценить вращательные движения КА при различных начальных условиях и иллюстрируют сформулированные понятия и положения.
В настоящее время технически проработана реализуемость предложенного способа на грузовом корабле «Прогресс» при проведении экспериментов с гравитационно-чувствительной аппаратурой. Для закрутки КА вокруг оси, соответствующей максимальному или минимальному моменту инерции, могут использоваться штатные средства системы управления корабля «Прогресс» - штатные датчики угловой скорости (ДУС), система управления ориентацией корабля «Прогресс», двигатели ориентации. Научная аппаратура для изучения конвекции «Дакон-П» в настоящее время создается. Для измерения и фиксации температуры в НА «Дакон-П» будут использоваться датчики температуры, телеметрическая система и БЦВМ ТГК «Прогресс». Для изменения скорости закрутки космического аппарата на орбите могут использоваться штатные средства системы управления ориентацией корабля «Прогресс». Для измерения угловой скорости КА могут использоваться штатные бортовые датчики и вычислительные устройства.
Предлагаемый способ позволяет использовать космические аппараты при выполнении экспериментов с научной аппаратурой по изучению конвекции и обеспечивать возможность исследования влияния микроперегрузок на процесс протекания конвекции.
Список литературы
1. Алексеев К.Б., Бебенин Г.Г. «Управление космическими летательными аппаратами», М.: Машиностроение, 1974.
2. Беляев М.Ю. «Научные эксперименты на космических кораблях и орбитальных станциях», М.: Машиностроение, 1984.
3. Белецкий В.В. Движение искусственного спутника относительно центра масс. М., Наука, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2010 |
|
RU2457159C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2010 |
|
RU2457158C2 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594056C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594054C1 |
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2015 |
|
RU2594057C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539266C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539068C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО ТРАНСПОРТНОГО ГРУЗОВОГО КОРАБЛЯ С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ПРОВЕДЕНИИ РАБОТ В УСЛОВИЯХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2013 |
|
RU2539271C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ НА ОРБИТАХ С МАКСИМАЛЬНОЙ ДЛИТЕЛЬНОСТЬЮ ТЕНЕВОГО УЧАСТКА | 2014 |
|
RU2562903C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С НЕПОДВИЖНЫМИ ПАНЕЛЯМИ СОЛНЕЧНЫХ БАТАРЕЙ ПРИ ВЫПОЛНЕНИИ ЭКСПЕРИМЕНТОВ | 2014 |
|
RU2562904C1 |
Изобретение относится к управлению ориентацией космического аппарата (КА). Способ включает закрутку КА, измерение расстояния от научной аппаратуры КА по изучению конвекции до оси закрутки, измерение и фиксацию температуры в этой аппаратуре, а также угловой скорости КА. При этом скорость закрутки КА изменяют с учетом взаимообусловленных изменений указанных измеряемых параметров. Техническим результатом изобретения является обеспечение возможности изучения влияния уровня микроускорений на процесс конвекции при управлении ориентацией КА.
Способ управления ориентацией космического аппарата при проведении экспериментов с научной аппаратурой по изучению конвекции, включающий закрутку космического аппарата, отличающийся тем, что измеряют расстояние от научной аппаратуры до оси закрутки, в процессе закрутки космического аппарата измеряют и фиксируют температуру в научной аппаратуре по изучению конвекции и угловую скорость космического аппарата, и изменяют скорость закрутки космического аппарата с учетом изменения измеряемых параметров.
| СПОСОБ ОДНООСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ВЫТЯНУТОЙ ФОРМЫ | 2010 |
|
RU2457159C2 |
| СПОСОБ ТРЕХОСНОЙ ГРАВИТАЦИОННОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ СПУТНИКА ЗЕМЛИ | 1995 |
|
RU2128607C1 |
| US 7159824 B2, 09.01.2007 | |||
| US 6231011 B1, 15.05.2001 | |||
| US 5638303 A1, 10.06.1997 | |||
| US 5163640 А, 17.11.1992. | |||

