ОБЛАСТЬ ТЕХНИКИ
Варианты осуществления настоящего изобретения относятся к буровому устройству, включающему буровое долото, соединенное с ротором, установленным с возможностью вращения внутри статора, например, двигателя объемного типа или турбины.
УРОВЕНЬ ТЕХНИКИ
Забойные бескомпрессорные двигатели используются в нефтехимической промышленности для приложения мощности в местоположении на забое скважины к буровому долоту в нефтяных и/или газовых скважинах для применений при бурении. Забойный бескомпрессорный двигатель, иногда упоминаемый как гидравлический забойный двигатель, устанавливается на днище бурильной колонны и соединяется с помощью выходного вала с буровым долотом. Буровой раствор, иногда упоминаемый как глинистый раствор для бурения или просто раствор, закачивается через бурильную колонну и через забойный бескомпрессорный двигатель. Забойный бескомпрессорный двигатель использует мощность закачиваемого/протекающего бурового раствора для получения механической полезной мощности, вращения выходного вала и, в свою очередь, бурового долота.
Хотя существуют различные типы забойных бескомпрессорных/гидравлических забойных двигателей, наиболее часто используемым типом в настоящее время является двигатель объемного типа, который использует вытянутый геликоидальный ротор внутри соответствующего геликоидального статора. Поток бурового раствора или раствора между статором и ротором заставляет ротор двигаться внутри статора по эксцентрической орбите вокруг продольной оси статора. Собственно ротор вращается вокруг своей продольной оси и также вращается по орбите вокруг центральной продольной оси статора. Эта эксцентрическая траектория и вращение ротора передается посредством соответствующей коробки передач, такой как сборка карданного сочленения, для получения концентрического вращения выходного вала.
Забойный бескомпрессорный двигатель является разновидностью динамического бурильного инструмента для забоя скважины, который преобразовывает мощность бурового раствора во вращение бурового долота; приложение крутящего момента и скорости к буровому долоту. Преимущества использования забойного бескомпрессорного двигателя состоят в том, что он обеспечивает: более высокую скорость бурения; лучший контроль искривления ствола скважины; сниженную частоту разрушения бурильной колонны.
Забойный бескомпрессорный двигатель, гидравлический забойный двигатель или буровой двигатель может также упоминаться как винтовой объемный насос, который может быть размещен на бурильной колонне для подачи дополнительной мощности на буровое долото в процессе бурения. Как указано выше, забойный бескомпрессорный двигатель использует буровой раствор для создания эксцентрического движения в силовой секции двигателя, которое передается как мощность концентрического движения на буровое долото. Забойный бескомпрессорный двигатель использует различные конфигурации ротора и статора с целью обеспечения оптимальных параметров для требуемой операции бурения; в типичном случае число лопастей и длина силовой установки могут быть увеличены для обеспечения большей мощности. В некоторых применениях для подачи мощности на забойный бескомпрессорный двигатель может использоваться сжатый воздух или другие сжатые газы. Вращение долота при использовании забойного бескомпрессорного двигателя может составлять от 60 оборотов в минуту до более 100 оборотов в минуту.
Забойные бескомпрессорные двигатели могут включать верхний переводник, который соединяет забойный бескомпрессорный двигатель с бурильной колонной; силовую секцию, которая состоит из ротора и статора; секцию коробки передач, где мощность эксцентрического движения от ротора передается как мощность концентрического движения на буровое долото; опору бурового долота, которая защищает инструмент от давлений над забоем и противодавлений на забой; и нижний переводник, который соединяет забойный бескомпрессорный двигатель с буровым долотом.
Использование забойных бескомпрессорных двигателей существенно зависит от финансовой эффективности. В прямых вертикальных стволах скважин гидравлический забойный двигатель может использоваться для повышенной скорости проходки при бурении (СПБ), или чтобы минимизировать эрозию и износ на бурильной колонне, поскольку для бурильной колонны нет необходимости вращаться так же быстро. Однако, в большинстве случаев, забойный бескомпрессорный двигатель используется для направленного бурения. Хотя для управления буром для направленного бурения буровой скважины могут использоваться и другие способы, забойный бескомпрессорный двигатель может оказаться наиболее рентабельным способом.
В некоторых аспектах забойный бескомпрессорный двигатель может быть сконфигурирован таким образом, чтобы включать секцию изгиба с целью обеспечения возможности направленного бурения. В типичном случае забойные бескомпрессорные двигатели могут быть модифицированы в пределах от приблизительно нуля до четырех градусов для обеспечения возможности направленного бурения с приблизительно шестью инкрементами отклонения на градус изгиба. Величина изгиба определяется скоростью подъема, необходимой для достижения заданной зоны. За счет использования инструмента для измерения во время бурения (ИВБ), бурильщик наклонно-направленного бурения может направлять буровое долото, которое приводится в движение забойным бескомпрессорным двигателем, в требуемую заданную зону.
Силовая секция забойного бескомпрессорного двигателя состоит из статора и ротора. В некоторых забойных бескомпрессорных двигателях статор включает резиновую втулку на стенке стальной трубы, где внутренняя поверхность резиновой втулки определяет спиральную конструкцию с определенным геометрическим параметром. Ротор включает вал, такой как стальной вал, который может быть покрыт износостойким покрытием, таким как хром, и может иметь геликоидальный профиль, сконфигурированный для движения/поворота/вращения внутри статора.
В ходе процедуры бурения буровой раствор закачивается в забой скважины через буровую трубу при определенной скорости и давлении. Забойный бескомпрессорный двигатель преобразует гидравлическую энергию бурового раствора, проходящего через силовую секцию, в механическую энергию, вращение и крутящий момент. Эта механическая энергия передается от забойного бескомпрессорного двигателя на буровое долото.
Альтернативой использованию двигателя объемного типа является применение турбины в процессе, который часто называется турбинным бурением. В способе турбинного бурения мощность генерируется на дне ствола скважины с помощью турбин, работающих на буровом растворе. Турбобур состоит из четырех основных узлов: верхней, или осевой, опоры; турбин, нижней опоры и бурового долота. В процессе работы раствор закачивается через буровую трубу, проходит через осевую опору и в турбину. В турбине статоры, присоединенные к корпусу инструмента, отводят поток раствора на роторы, присоединенные к валу. Это заставляет вал, соединенный с буровым долотом, вращаться. Раствор проходит через полую часть вала в нижнюю опору и через буровое долото, как и при роторном бурении, для удаления отходов, охлаждения бурового долота и выполнения других функций бурового раствора. Объем раствора, который является источником мощности, является параметром при определении скорости вращения.
Лопасти многоступенчатой высокоэффективной реактивной турбины извлекают гидравлическую энергию из потока протекающего раствора и преобразовывают ее в механическую энергию (крутящий момент и вращение), чтобы привести в действие буровое долото. Каждая из ступеней турбины состоит из статора, прикрепленного к корпусу инструмента, и ротора, прикрепленного к выходному валу. Они сконструированы для синхронной работы, направляя и ускоряя раствор при его прохождении через каждую из ступеней. Для достижения высоких уровней мощности и крутящего момента, необходимых в применениях для бурения прямолинейных скважин, комплектные инструменты монтируются приблизительно со 150 наборами идентичных пар, состоящих из ротора и статора. С целью обеспечения длительного срока службы роторы и статоры изготавливаются с применением высококачественных сплавов, которые устойчивы как к эрозии, так и к коррозии.
Подобно двигателю объемного типа, турбобур генерирует механическую мощность за счет перепада давления поперек системы привода, связанного со скоростью потока флюида. В общем случае, чем больше величина перепада давления на инструменте, тем больше потенциал для передачи механической мощности на буровое долото. Поскольку система генерирования мощности турбобура является полностью механической, она способна выдерживать исключительно высокий перепад давления, который создает большую механическую мощность по сравнению с гидравлическим забойным двигателем.
С учетом своих преимуществ, двигатели объемного типа (ДОТ) и турбины в большом количестве используются в нефтепромысловых операциях бурения для увеличения скорости вращения и крутящего момента, подаваемого на буровое долото при бурении.
Несмотря на широкое использование, однако, обычно неизвестно точно, какая скорость вращения генерируется в процессе операции бурения с использованием ДОТ и/или турбины.
Скорость вращения бурового двигателя или турбины может быть исключительно важной при управлении направлением бурения бурильной системы, СПБ, устойчивостью системы бурения, колебаниями системы бурения, эффективностью работы системы бурения и/или тому подобным. По существу, для обеспечения эффективной работы системы бурения с использованием забойного бескомпрессорного двигателя в значительной степени в реальном времени важным является определение свойств вращения забойного бескомпрессорного двигателя или турбины.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем описании изобретения термин бурильная турбина, вал, приводной вал и/или ротор могут использоваться попеременно для описания элемента (элементов), вращающихся в забойном бескомпрессорном двигателе и обеспечивающих вращение бурового долота.
Таким образом, в первом аспекте настоящее изобретение относится к буровому устройству, включающему буровое долото, соединенное с ротором, смонтированным вращательным образом внутри статора, ротор включает по меньшей мере один источник магнитного поля или детектор магнитного поля, и статор включает по меньшей мере один источник магнитного поля, если ротор включает детектор магнитного поля, или включает по меньшей мере один детектор магнитного поля, если ротор включает источник магнитного поля.
Таким образом, по мере вращения ротора относительно статора детектор на роторе или статоре будет детектировать флуктуации воспринимаемого магнитного поля. Скорость вращения ротора относительно статора может быть установлена путем интерпретирования флуктуаций.
Таким образом, во втором аспекте изобретение относится к способу определения скорости вращения ротора, смонтированного внутри статора, способ включает измерение магнитного поля, детектируемого по меньшей мере одним детектором магнитного поля в устройстве, определенном здесь, и определение скорости вращения на основе измерений.
Как указывалось выше, ротор и статор могут образовывать двигатель объемного или кавитационного типа или турбину. Однако также возможны и другие компоновки ротора и статора.
Скорость вращения ротора может, например, быть определена с помощью хронометража длительности времени между пиками детектируемого магнитного поля. Кроме того, скорость вращения может быть определена путем проведения частотного анализа измеренного магнитного поля.
В общем случае, однако, желательно также контролировать направление вращения, а также скорость вращения. Для того чтобы можно было установить направление вращения, источники и детекторы магнитного поля должны быть установлены таким образом, чтобы обеспечить возможность указания направления вращения в детектируемом магнитном поле.
Будет также очевидно, что, если имеется в наличии более чем один источник магнитного поля, то для того, чтобы их применение было полезным в рамках настоящего изобретения, они все должны быть расположены либо на роторе, либо на статоре. Подобным образом, если имеется в наличии более чем один детектор магнитного поля, то они все должны быть расположены либо на роторе, либо на статоре. Любые источники или детекторы магнитного поля, которые могут иметься в наличии, однако которые не расположены вместе с большей частью источников или детекторов на роторе или сенсоре, не могут давать вклад в измерение скорости или направления вращения ротора относительно статора для целей, определяемых изобретением.
Также будет ясно, что оказывают воздействие как северный полюс, так и южный полюс источника магнитного поля, которые будут физически разделены.
Таким образом, для того, чтобы определить направление вращения, должны иметься в наличии детектор и любые два из дополнительного детектора, первого источника магнитного поля и второго источника магнитного поля, отличного от первого, расположенные так, чтобы ни в коем случае не находиться на одной прямой с центром вращения ротора в любой точке в процессе полного оборота ротора внутри статора. Дополнительные детекторы и источники могут иметься в наличии, однако это минимальное условие обеспечивает детектирование направления вращения.
Такая компоновка задает асимметричную ориентацию источников и детекторов магнитного поля, позволяя установить направление вращения.
Удобным способом обеспечения отличных друг от друга магнитных полей является компоновка, в которой первый источник является северным полюсом, и второй источник является южным полюсом. Другим вариантом является обеспечение того, чтобы детектируемая напряженность магнитного поля от одного источника заметно отличалась от интенсивности от второго источника, например, путем установления различных расстояний между источниками и детекторами или путем установления одного источника, более сильного, чем другой.
Например, в варианте осуществления ротор включает один источник магнитного поля, и статор включает два детектора магнитного поля, при этом детекторы не находятся на одной оси с центром вращения ротора. В данном случае направление вращения может быть установлено с помощью взаимной корреляции магнитных полей, детектируемых двумя детекторами. Направление вращения может быть установлено, сравнивая времена, когда два детектора воспринимают воздействие магнитного поля.
В другом варианте осуществления ротор включает один источник магнитного поля, однако при этом северный и южный полюса установлены так, чтобы не находиться на одной оси с центром вращения ротора. Кроме того, статор включает один детектор магнитного поля. В данном случае один детектор воспринимает воздействие со стороны как северного, так и южного полюса в процессе одного оборота ротора, и направление вращения может быть определено с помощью сравнения времен между воздействиями со стороны северного и южного полюсов.
Таким образом, в одном варианте осуществления направление движения измеряется с помощью взаимной корреляции измеренного магнитного поля, воспринимаемого по меньшей мере двумя детекторами магнитного поля. В другом варианте осуществления направление движения измеряется с помощью сравнения времени между пиками и/или провалами по меньшей мере двух отличных друг от друга детектируемых магнитных полей.
В одном варианте осуществления имеются дополнительные источники и детекторы магнитного поля для того, чтобы обеспечить возможность дополнительных измерений скорости и направления, которые приводят к улучшению точности и вводят избыточность в компоновку на случай поломки инструмента. Таким образом, в некоторых вариантах осуществления буровое устройство включает по меньшей мере два источника магнитного поля и по меньшей мере два детектора магнитного поля.
Источник магнитного поля может соответствующим образом задаваться магнитом, который может представлять собой любой вид магнита, например, постоянный магнит или электромагнит.
Детектор магнитного поля может включать магнитометр. В некоторых аспектах может быть использован магнитометр полного поля для обеспечения детектором, который был бы нечувствительным к вращению в магнитном поле Земли, и для обеспечения возможности точной интерпретации движения вала.
В одном варианте осуществления настоящего изобретения измерение относительных движений может быть передано, например, с помощью передачи электромагнитного сигнала, на поверхность с целью обеспечения возможности проведения операции управления забойным бескомпрессорным двигателем. Передача может быть осуществлена посредством телеметрической системы регистрации параметров бурения с помощью импульсов давления в столбе бурового раствора, трубы с кабелем, передачи акустического сигнала, беспроводной передачи, передачи электромагнитного сигнала и/или тому подобного. В других вариантах осуществления для управления забойным бескомпрессорным двигателем может использоваться процессор в забое скважины, использующий данные об относительном движении. Еще в других вариантах осуществления забойный бескомпрессорный двигатель может обрабатывать данные об относительном движении и передавать данные, полученные из данных об относительном движении, на поверхность.
В вариантах осуществления настоящего изобретения данные об относительном движении могут быть переданы от одного элемента бурильной колонны и/или на поверхность с помощью различных методик, включающих: короткопрыжковую передачу электромагнитного сигнала, токосъемные контактные кольца и кабели, пульсацию давления, передачу акустического сигнала и/или тому подобные.
Изобретение ниже проиллюстрировано только в качестве примера и со ссылкой на приведенные ниже фигуры, где:
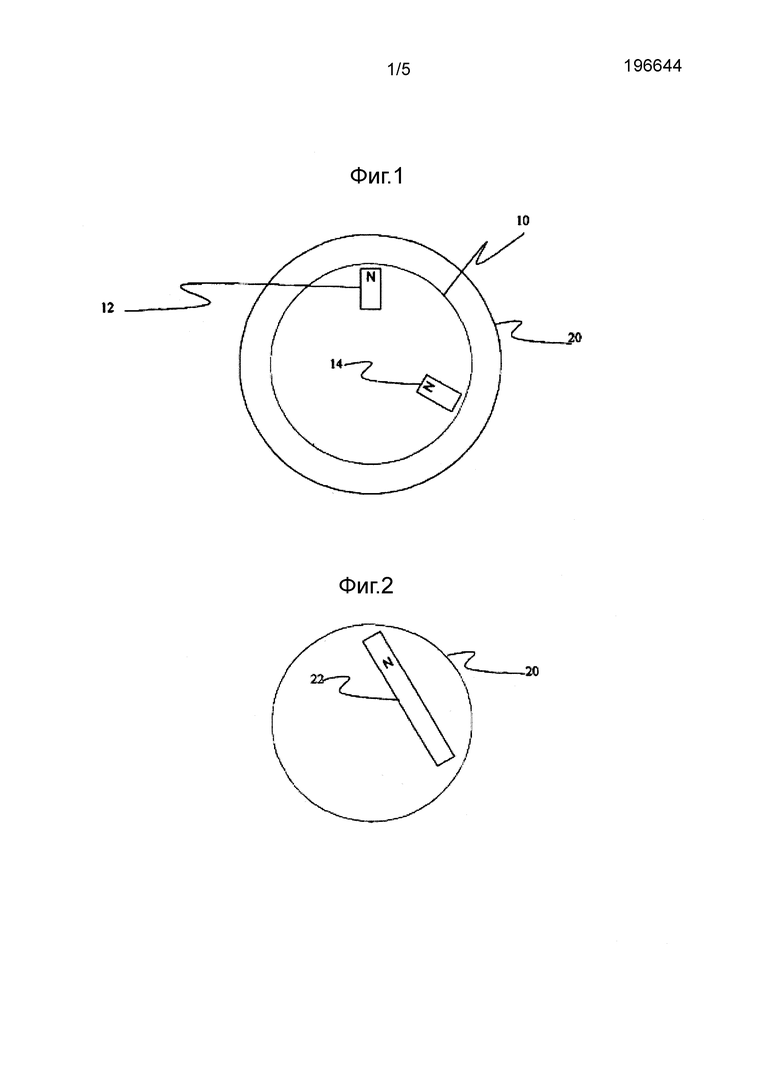
Фигура 1 - это схематическое представление поперечного сечения через ротор с целью использования в гидравлическом забойном бескомпрессорном двигателе, согласно настоящему изобретению.
Фигура 2 - это схематическое представление поперечного сечения через другой ротор с целью использования в гидравлическом забойном бескомпрессорном двигателе, согласно настоящему изобретению.
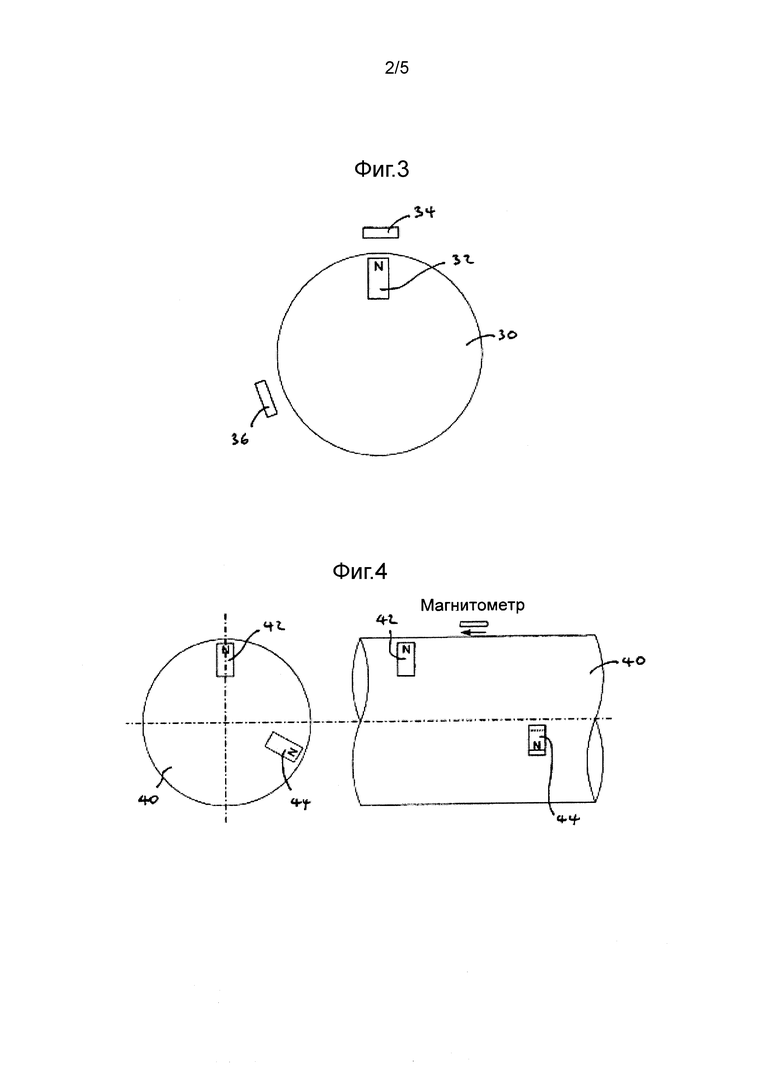
Фигура 3 - это схематическое представление поперечного сечения через еще один ротор с целью использования в гидравлическом забойном бескомпрессорном двигателе, согласно настоящему изобретению.
Фигура 4 - это схематическое представление поперечного сечения вместе с видом сбоку через еще один ротор с целью использования в гидравлическом забойном бескомпрессорном двигателе, согласно настоящему изобретению.
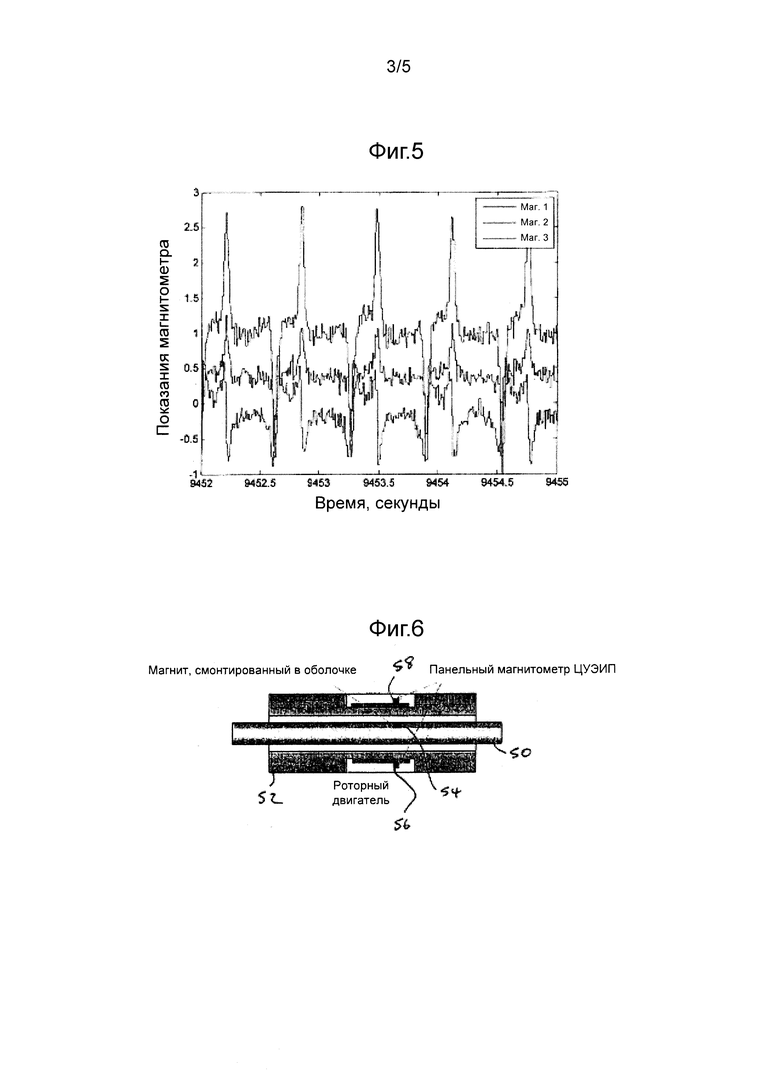
Фигура 5 - это график, показывающий показания магнитометра в зависимости от времени для компоновки, показанной на Фигуре 1.
Фигура 6 - это схематическое представление вида сбоку в разрезе компоновки ротора и статора с целью использования в качестве гидравлического забойного бескомпрессорного двигателя, согласно настоящему изобретению.
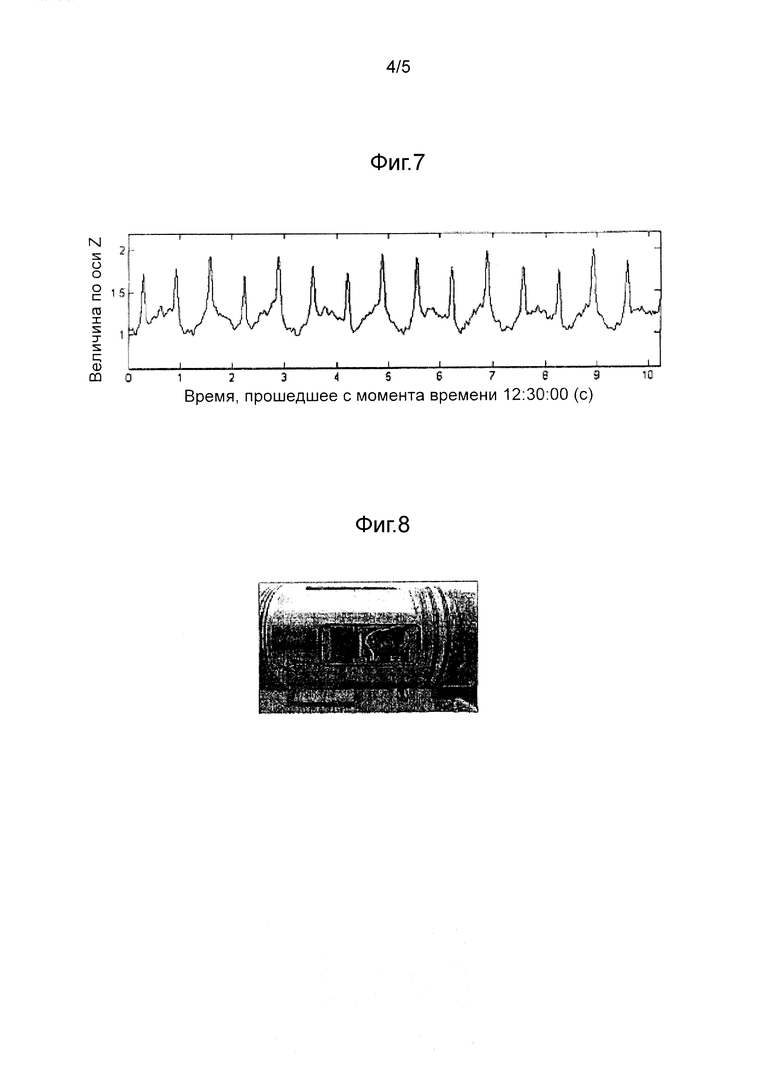
Фигура 7 - это записанная кривая показаний магнитометра в компоновке, согласно настоящему изобретению.
Фигура 8 - это изображение внешней части корпуса статора в компоновке, согласно настоящему изобретению, с вырезанной частью кожуха так, чтобы показать панель магнитометра цифрового универсального электроизмерительного прибора (ЦУЭИП) внутри.
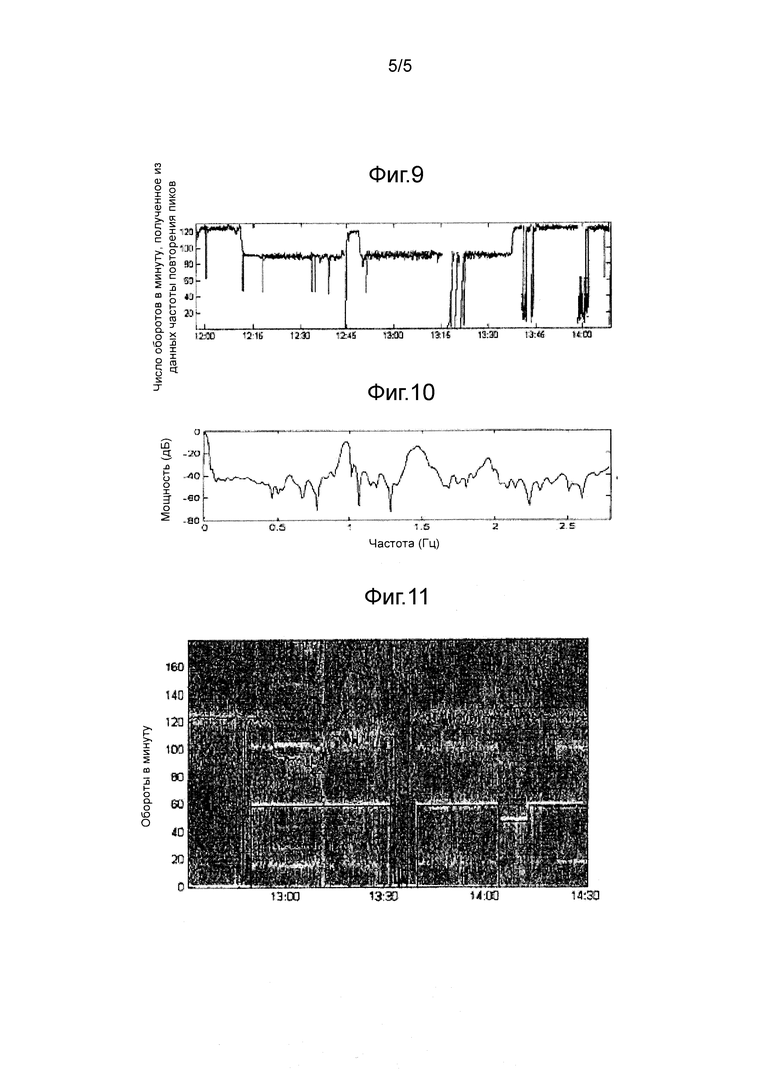
Фигура 9 - это график, на котором представлена вычисленная скорость вращения ротора относительно статора на основании измерений, полученных от варианта осуществления, согласно настоящему изобретению.
Фигура 10 - это график, показывающий распределение измеренных частот магнитного поля в процессе бурильного движения с применением устройства, согласно настоящему изобретению.
Фигура 11 - это график, показывающий вычисленную скорость вращения ротора относительно статора в компоновке, согласно настоящему изобретению.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Последующее описание предоставляет только предпочтительный пример (примеры) осуществления изобретения и не направлено на то, чтобы ограничивать объем, применимость или конфигурацию изобретения. Скорее, последующее описание предпочтительного примера (примеров) осуществления изобретения обеспечит специалистов в рассматриваемой области техники описанием, предоставляющим возможность реализации предпочтительного примера осуществления изобретения. При этом предполагается, что различные изменения в функции и компоновке элементов могут быть выполнены без отхода от объема изобретения, как указано в настоящем документе.
Конкретные подробности приведены в последующем описании для обеспечения всестороннего понимания вариантов осуществления. Однако для среднего специалиста в рассматриваемой области техники понятно, что варианты осуществления могут быть использованы на практике и без таких конкретных подробностей. Например, схемы могут быть показаны в виде блок-схем, чтобы не затруднять варианты осуществления ненужными подробностями. В других примерах хорошо известные схемы, процессы, алгоритмы, конструкции и методики могут быть показаны без ненужных подробностей, чтобы избежать затруднения понимания вариантов осуществления.
Также следует отметить, что варианты осуществления могут быть описаны, как процесс, который изображается в виде схемы процесса, технологической схемы, диаграммы потоков данных, структурной схемы или блок-схемы. Хотя схема процесса и может описывать операции как последовательный процесс, многие операции могут быть выполнены параллельно или одновременно. Кроме того, порядок операций может быть перегруппирован. Процесс прекращается, когда его операции завершены, но может иметь дополнительные этапы, не включенные на фигуре. Процесс может соответствовать способу, функции, процедуре, стандартной подпрограмме, части программы и т.д. Если процесс соответствует функции, его прекращение соответствует возврату функции к вызывающей функции или к главной функции.
Кроме того, варианты осуществления могут быть реализованы с помощью аппаратных средств, программных средств, программно-аппаратных средств, микропрограммных средств, микрокода, языков описания аппаратных средств или любого их сочетания. При внедрении в программных средствах, программно-аппаратных средствах, микропрограммных средствах или в микрокоде код программы или сегменты кода для выполнения требуемых задач могут храниться на машиночитаемом носителе информации, таком как запоминающее устройство. Процессор (процессоры) может выполнять требуемые задачи. Сегмент кода может представлять процедуру, функцию, часть программы, программу, стандартную программу, стандартную подпрограмму, модуль, пакет программ, класс или любое сочетание команд, структур данных или операторов программ. Сегмент кода может быть сочленен с другим сегментом кода или аппаратной схемой за счет пересылки и/или получения информации, данных, аргументов, параметров или содержимого запоминающих устройств. Информация, аргументы, параметры, данные и т.д. могут быть пересланы, посланы или переданы с помощью любых соответствующих средств, включая совместное использование памяти, обмен сообщениями, эстафетную передачу, передачу по сети и т.д.
Обращаясь к фигурам, на Фигуре 1 показано поперечное сечение через ротор 10, включающий первый источник магнитного поля 12 и второй источник магнитного поля 14, согласно варианту осуществления настоящего изобретения. Первый источник магнитного поля 12 ориентирован так, что его полюса находятся на одной оси с центром вращения ротора, при этом северный полюс расположен дальше от центра. Второй источник магнитного поля 14 ориентирован так, что его полюса находятся на одной оси с центром вращения ротора 10, при этом южный полюс расположен дальше от центра. В варианте осуществления настоящего изобретения ротор 10 установлен внутри кожуха 20, в котором ротор 10 может вращаться. В некоторых аспектах кожух 20 может включать статор.
Таким образом, в некоторых вариантах осуществления, когда один детектор размещается в произвольном месте на соответствующем статоре, могут быть определены как скорость, так и направление вращения ротора. В таком варианте осуществления детектор воспринимает смену положительного сигнала, затем отрицательного, при этом они имеют разные фазы, что может обрабатываться процессором (не показан) с целью определения скорости и/или направления вращения вала относительно корпуса двигателя или турбины.
В некоторых вариантах осуществления настоящего изобретения ротор 10 на Фигуре 1 может включать центральный элемент турбины. В таком случае варианты воплощения ротора 10 могут включать одну или более лопастей, и ротор 10 может быть расположен внутри кожуха 20. Лопасти ротора 10 обеспечивают преобразование движения флюида через кожух 20 во вращательное движение ротора 10. В таких вариантах воплощения система включает турбину, которая может быть использована для приведения в движение бурового долота в системе бурения.
На Фигуре 2 показано поперечное сечение через ротор 20, включающий один источник магнитного поля 22, имеющий как северный, так и южный полюс, согласно варианту осуществления настоящего изобретения. Однако, в данном варианте осуществления, с учетом того, что полюса не находятся на одной оси с центром вращения ротора, один детектор, установленный в произвольном месте на соответствующем статоре, может измерять как скорость, так и направление вращения ротора относительно статора.
На Фигуре 3 показано поперечное сечение через ротор 30, включающий один источник магнитного поля 32, при этом его полюса находятся на одной прямой с центром вращения ротора, согласно варианту осуществления настоящего изобретения. В данном варианте осуществления два детектора 34, 36 используются для измерения как скорости вращения, так и направления вращения ротора 30.
В варианте осуществления настоящего изобретения направление вращения может быть определено с помощью взаимной корреляции откликов, измеренных с помощью двух детекторов 34, 36.
На Фигуре 4 показано поперечное сечение через ротор 40, включающий первый источник магнитного поля 42 и второй источник магнитного поля 44, согласно варианту осуществления настоящего изобретения. В данном варианте осуществления как первый источник магнитного поля 42, так и второй источник магнитного поля 14 ориентированы так, что их полюса находятся на одной оси с центром вращения ротора, при этом их северные полюса расположены дальше от центра.
На Фигуре 5 проиллюстрированы реальные измеренные показатели магнитометра, полученные от трех магнитометров, расположенных в статоре, окружающем ротор, как изображено на Фигуре 1, согласно варианту осуществления настоящего изобретения.
На Фигуре 6 показано схематическое представление вида сбоку в разрезе ротора 50 и статора 52 в сочетании, согласно варианту осуществления настоящего изобретения. Ротор содержит источник магнитного поля 54, и статор содержит детекторы магнитного поля 56, 58.
В варианте осуществления, показанном на Фигуре 6, так как источник магнитного поля 54, так и детекторы 56, 58 находятся на одной оси с центром вращения статора в двух точках при одном обороте статора, в данной компоновке возможно определять только скорость вращения ротора, и невозможно определять направление вращения.
На Фигуре 7 показан график измеренного магнитного поля в компоновке, показанной на Фигуре 6, согласно варианту осуществления настоящего изобретения. Измеренные времена между первыми четырьмя пиками составляют 0,6412, 0,6522, 0,6492 и 0,6532 секунд. Согласно варианту осуществления настоящего изобретения, это дает в результате измеренные значения скорости вращения, соответственно 93,57, 91,99, 92,42 и 91,85 оборотов в минуту. В некоторых вариантах осуществления такие измерения могут быть усреднены, например, используя скользящее среднее, для получения показаний измеренной скорости вращения в любой момент времени.
В вариантах осуществления настоящего изобретения скорости ротора/турбины могут быть обработаны с помощью процессора, который может быть расположен в забое скважины и/или на поверхности, и обработанные скорости могут быть использованы для управления работой забойного бескомпрессорного двигателя и/или процессом бурения.
На Фигуре 8 показано изображение реального устройства, проиллюстрированного на Фигуре 6, согласно варианту осуществления настоящего изобретения, и с помощью данного устройства были сгенерированы данные, показанные на Фигуре 7.
На Фигуре 9 показан график измеренных значений скорости вращения, измеренных согласно варианту осуществления настоящего изобретения, как функции времени на протяжении более длительного периода времени. В варианте осуществления настоящего изобретения измеренные данные могут быть обработаны так, чтобы показать, что скорость работы забойного бескомпрессорного двигателя изменяется от 120 до 90 оборотов в минуту на протяжении двух минут измерения данных.
На Фигуре 10 показан частотный анализ данных, измеренных магнитометрами, согласно варианту осуществления настоящего изобретения. В вариантах осуществления настоящего изобретения данные по частоте могут быть обработаны для определения того, что пики наблюдаются на частотах приблизительно 1,0, 1,5 и 2,0 Гц. Пики на частотах 1,5 и 2,0 Гц относятся к вращению ротора внутри статора. Пик на частоте 1,0 Гц относится к вращению статора в магнитном поле Земли.
На Фигуре 11 показан график скорости вращения, показанный на Фигуре 9, но с наложением скорости вращения статора. Обработка данных показывает, что статор вращается со скоростью приблизительно 60 оборотов в минуту в магнитном поле Земли.
Данные, полученные обработкой сигналов от систем роторов, согласно вариантам осуществления настоящего изобретения, обеспечивают возможность определения вращательных свойств ротора при проведении процессов бурения. Таким образом, в вариантах осуществления настоящего изобретения можно контролировать и/или управлять работой ротора/забойного бескомпрессорного двигателя.
Изобретение было подробно описано в целях его ясности и понимания. Однако следует понимать, что некоторые изменения и модификации могут применяться на практике в пределах объема прилагаемой формулы изобретения. Кроме того, в приведенном выше описании для целей иллюстрирования в определенном порядке были описаны различные способы и/или процедуры. Следует понимать, что в альтернативных вариантах осуществления способы и/или процедуры могут быть выполнены в порядке, отличающемся от описанного.
Изобретение относится к забойным бескомпрессорным двигателям для вращения буровых долот. Технический результат - обеспечение возможности контроля и/или управления работой забойного бескомпрессорного двигателя. Система бурения, предназначенная для бурения буровой скважины, включает забойный бескомпрессорный двигатель, содержащий ротор, установленный с возможностью вращения внутри статора, буровое долото, соединенное с забойным бескомпрессорным двигателем и выполненное с возможностью передачи вращения ротора на буровое долото для его вращения в буровой скважине, и процессор. Ротор двигателя включает по меньшей мере один источник магнитного поля или детектор магнитного поля, а статор включает по меньшей мере один источник магнитного поля, если ротор включает детектор магнитного поля или включает по меньшей мере один детектор магнитного поля, если ротор включает источник магнитного поля. Процессор выполнен с возможностью управления забойным бескомпрессорным двигателем с использованием измерений, сгенерированных посредством по меньшей мере одного источника магнитного поля и по меньшей мере одного детектора магнитного поля. 3 н. и 15 з.п. ф-лы, 11 ил.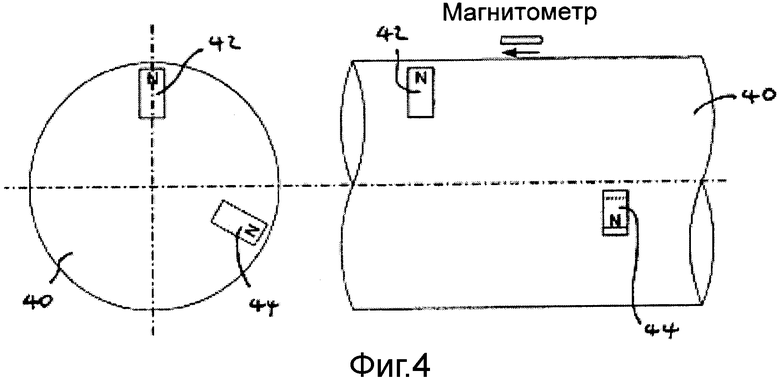
1. Система бурения, предназначенная для бурения буровой скважины, содержащая:
забойный бескомпрессорный двигатель, содержащий ротор, установленный с возможностью вращения внутри статора, причем ротор включает по меньшей мере один источник магнитного поля или детектор магнитного поля, при этом статор включает по меньшей мере один источник магнитного поля, если ротор включает детектор магнитного поля, или включает по меньшей мере один детектор магнитного поля, если ротор включает источник магнитного поля;
буровое долото, соединенное с забойным бескомпрессорным двигателем и выполненное с возможностью передачи вращения ротора на буровое долото для его вращения в буровой скважине; и
процессор, выполненный с возможностью управления забойным бескомпрессорным двигателем с использованием измерений, сгенерированных посредством по меньшей мере одного источника магнитного поля и по меньшей мере одного детектора магнитного поля.
2. Система бурения по п.1, отличающаяся тем, что содержит детектор и любые два из дополнительного детектора, первого источника магнитного поля и второго источника магнитного поля, отличного от первого, скомпонованных таким образом, чтобы никогда не находиться на одной прямой с центром вращения ротора в любой точке в процессе полного оборота ротора внутри статора.
3. Система бурения по п.2, отличающаяся тем, что первый источник является северным полюсом, и второй источник является южным полюсом.
4. Система бурения по п.2 или 3, отличающаяся тем, что детектируемая напряженность от одного источника магнитного поля заметно отличается от напряженности от второго источника.
5. Система бурения по п.1, отличающаяся тем, что включает по меньшей мере два источника магнитного поля и по меньшей мере два детектора магнитного поля.
6. Система бурения по п.1, отличающаяся тем, что дополнительно включает процессор, предназначенный для обработки сигнала, сгенерированного детектором магнитного поля.
7. Система бурения по п.1, отличающаяся тем, что процессор предназначен для получения скорости ротора на основании сигналов, полученных от детектора магнитного поля.
8. Буровое устройство, содержащее буровое долото, соединенное с турбиной, причем турбина включает центральный элемент турбины, установленный с возможностью вращения внутри кожуха, центральный элемент турбины содержит по меньшей мере один источник магнитного поля или детектор магнитного поля, и кожух содержит по меньшей мере один источник магнитного поля, если ротор включает детектор магнитного поля, или включает по меньшей мере один детектор магнитного поля, если центральный элемент турбины включает источник магнитного поля.
9. Способ управления забойным бескомпрессорным двигателем, предназначенным для бурения буровой скважины через геологический пласт, причем забойный бескомпрессорный двигатель содержит ротор внутри кожуха, в котором:
используют детектор магнитного поля для измерения магнитного поля, сгенерированного при относительном вращении источника магнитного поля, при этом детектор магнитного поля соединен с кожухом, когда источник магнитного поля соединен с ротором, и детектор магнитного поля соединен с ротором, когда источник магнитного поля соединен с кожухом; и
используют процессор для обработки измеренного магнитного поля для получения скорости вращения ротора;
используют процессор для управления работой забойного бескомпрессорного двигателя с использованием скорости вращения ротора.
10. Способ по п.9, отличающийся тем, что забойный бескомпрессорный двигатель включает статор.
11. Способ по п.9, отличающийся тем, что забойный бескомпрессорный двигатель включает турбину.
12. Способ по п.9, отличающийся тем, что скорость вращения определяют с помощью измерения времени между пиками и/или провалами в измеренном магнитном поле.
13. Способ по п.9, отличающийся тем, что скорость вращения определяют с помощью частотного анализа измеренного магнитного поля.
14. Способ по любому из пп.9-13, отличающийся тем, что в нем дополнительно определяют направление движения ротора с помощью взаимной корреляции измеренного магнитного поля, воспринимаемого по меньшей мере двумя детекторами магнитного поля.
15. Способ по п.14, отличающийся тем, что направление движения определяют с помощью сравнения времени между пиками и/или провалами по меньшей мере двух отличных друг от друга детектируемых магнитных полей.
16. Способ по п.9, отличающийся тем, что в нем дополнительно осуществляют передачу измеренного магнитного поля или скорости вращения на поверхность.
17. Способ по п.16, отличающийся тем, что измеренное магнитное поле или скорость вращения передают с помощью трубы с кабелем.
18. Способ по п.9, отличающийся тем, что процессор расположен в буровой скважине с забойным бескомпрессорным двигателем.
| US 20080170841 A1, 17.07.2008 | |||
| US 20060279243 A1, 14.12.2006 | |||
| US 20030205998 A1, 06.11.2003 | |||
| US 6234259 B1, 22.05.2001 | |||
| US 20100301846 A1, 02.12.2010 | |||
| БУРИЛЬНОЕ УСТРОЙСТВО И СПОСОБ БУРЕНИЯ СТВОЛА | 2007 |
|
RU2405099C2 |

