Подземные операции бурения часто выполняют для локализации (разведки) или извлечения (добычи) подземных залежей углеводородов. В большинстве данных операций используют морские или сухопутные буровые установки, приводящие в действие множество соединенных между собой бурильных труб, известных как бурильная колонна. Мощные двигатели буровых установок на поверхности прикладывают крутящий момент и вращают бурильную колонну, а компоненты бурильной колонны своим весом создают направленную вниз осевую нагрузку на долото. На дальнем конце бурильной колонны установлен набор бурильного оборудования, известный специалистам в данной области техники, как компоновка низа бурильной колонны ("КНБК"). Обычно, КНБК может включать в себя буровые долота, утяжеленные бурильные трубы, центраторы с жесткими лопастями, расширители, гидравлические забойные двигатели, инструменты роторного управления направлением, датчики измерений во время бурения и другие устройства, необходимые для подземного бурения.
Хотя большинство операций бурения начинается вертикально, стволы скважин не всегда поддерживают вертикальную траекторию до полной глубины. Изменения в подземном пласте могут направлять ствол скважины отклониться от вертикали, поскольку бурильная колонна имеет естественное стремление следовать по пути меньшего сопротивления. Например, если встречается более мягкий, более легкий для проходки пласт, КНБК и прикрепленная бурильная колонна могут отклоняться и проходить дальше в данный более мягкий пласт легче, чем в относительно более твердый пласт. Будучи относительно не гибкими на коротких отрезках длины, компоненты бурильной колонны и КНБК становятся в некоторой степени гибкими на больших отрезках длины. Поскольку отклонение траектории ствола скважины обычно указывают как значение изменения угла (т.e. "набора угла кривизы") на сто футов (31 м) бурения, отклонение ствола скважины может быть неразличимо невооруженным глазом. Вместе с тем, на расстояниях в несколько сот футов отклонение ствола скважины может быть значительным.
Дополнительно к этому, следует понимать, что траектории многих стволов скважин сегодня специально включают в себя проектные отклонения ствола скважины. Например, в пластах, где зона добычи включает в себя горизонтальную оторочку, бурение одного отклоненного ствола горизонтально через данный пропласток может дать более эффективную добычу, чем несколько вертикальных стволов. Дополнительно к этому, в некоторых условиях, предпочтительно бурить один вертикальный основной ствол и иметь несколько ответвлений горизонтальных стволов от него для достижения всех углеводородных залежей пласта и их разработки. Таким образом, значительное время и ресурсы направлены на развитие и оптимизацию возможностей наклонно-направленного бурения.
Типичные схемы наклонно-направленного бурения включают в себя различные механизмы и устройства в КНБК для селективного отклонения бурильной колонны от ее естественной траектории. Одна такая схема включает в себя использование гидравлического забойного двигателя в комбинации с устройством кривого переводника в компоновке низа бурильной колонны. В стандартной практике роторного бурения бурильную колонну вращают с поверхности для приложения крутящего момента к буровому долоту внизу. С другой стороны, с использованием гидравлического забойного двигателя, прикрепленного к компоновке низа бурильной колонны, крутящий момент можно передавать на буровое долото от него, тем самым исключая необходимость вращения бурильной колонны с поверхности. Хотя существует много различных вариантов гидравлического забойного двигателя, большинство можно классифицировать как турбинные гидравлические забойные двигатели (т.e. турбомоторы) или винтовые (объемные) гидравлические забойные двигатели. Вне зависимости от специфики конструктивного исполнения большинство гидравлических забойных двигателей функционируют с преобразованием энергии потока бурового раствора под высоким давлением в механическую энергию.
Буровой раствор при использовании в нефтепромысловых вариантах применения обычно перекачивают на буровое долото на забое через ствол бурильной колонны под высоким давлением. Достигнув долота, буровой раствор гидравлически соединяется через множество насадок со стволом скважины, где поток бурового раствора охлаждает, смазывает и очищает от бурового шлама поверхности бурового долота. После выпуска обеспечивается возврат бурового раствора на поверхность через кольцевое пространство, образованное между стволом скважины (т.e. внутренним диаметром пласта или обсадной колонны) и внешним профилем бурильной колонны. Буровой раствор возвращается на поверхность, неся с собой буровой шлам.
Когда используют гидравлический забойный двигатель, нет необходимости вращать бурильную колонну для вращения бурового долота относительно ствола скважины. Вместо этого обеспечивают "скольжение" бурильной колонны, расположенной над гидравлическим забойным двигателем в стволе скважины, при осуществлении долотом проходки пласта. Как упомянуто выше, кривой переводник можно использовать в соединении с гидравлическим забойным двигателем для наклонно-направленного бурения ствола скважины. Кривой переводник может являться аналогичным обычной секции КНБК, отличаясь наличием незначительного угла кривизны в переводнике. Дополнительно, кривой переводник может разделять компоненты, прикрепленные над гидравлическим забойным двигателем (т.e. являться собственно кривым переводником), или может являться участком самого корпуса двигателя.
С помощью различных устройств измерений и телеметрии в КНБК оператор бурения на поверхности способен определять ориентацию направления искривления в кривом переводнике. Оператор бурения может затем повернуть бурильную колонну до установки искривления в направлении необходимой наклонно-направленной траектории и остановить вращение бурильной колонны. Оператор бурения затем приводит в действие гидравлический забойный двигатель и осуществляет бурение ствола скважины с отклонением, с перемещением бурильной колонны без вращения в стволе скважины (т.e. скольжением) за КНБК, с использованием только гидравлического забойного двигателя для привода бурового долота.
Когда изменение направления выполнено и необходимо вновь перемещение по "прямолинейной" траектории, оператор бурения равномерно вращает всю бурильную колонну для исключения направляющего действия кривого переводника на траекторию бурильной колонны. Когда вновь необходимо изменение траектории, вращение бурильной колонны останавливают, КНБК вновь ориентируют в нужном направлении, и гидравлический забойный двигатель бурит по данной траектории, остальная часть бурильной колонны скользит в стволе скважины.
Один недостаток наклонно-направленного бурения с гидравлическим забойным двигателем и кривым переводником возникает, когда вращение бурильной колонны остановлено, и перемещение вперед КНБК продолжается с использованием гидравлического забойного двигателя. Во время таких периодов бурильная колонна скользит в стволе скважины по мере бурения и не имеет вращения, предотвращающего прихват колонны в пласте. Конкретно, такие операции могут нести увеличенный риск прихвата бурильной колонны в стволе скважины и приводить к дорогостоящим ловильным работам для извлечения бурильной колонны и КНБК.
В последнее время в стремлении разрешить проблемы, связанные с бурением без вращения, разработаны роторные управляемые системы ("РУС"). В роторных управляемых системах траектория КНБК отклоняется, когда бурильная колонна продолжает вращаться. При этом роторные управляемые системы в общем делятся на два типа: системы с отталкиванием всей компоновки и системы с позиционированием долота. В РУС с отталкиванием всей компоновки группа выдвигающихся опорных башмаков выдвигается вбок из КНБК для отталкивания и смещения бурильной колонны на необходимую траекторию.
Пример одной такой системы описан в Патенте США №5168941. Для получения управления направлением, когда бурильная колонна вращается, выдвижные опоры выдвигаются из так называемого геостационарного участка бурильной компоновки. Геостационарные компоненты не вращаются относительно пласта, а вся остальная бурильная колонна вращается. Когда геостационарный участок остается по существу в согласованной ориентации, оператор на поверхности может направлять всю остальную КНБК по необходимой траектории относительно положения геостационарного участка с выдвижными опорами.
Другая РУС с позиционированием долота включает в себя шарнирно сочлененный блок ориентации в компоновке для "нацеливания" остальной части КНБК на необходимую траекторию. Примеры такой системы описаны в Патентах США №6092610 и 5875859. Как и в РУС с отталкиванием всей компоновки, блок ориентации РУС с позиционированием долота либо размещен на геостационарной муфте или имеет механическую или электронную геостационарную опорную плоскость, так что оператор бурения знает, которому направлению должна следовать траектория КНБК. Вместо группы выдвигающихся вбок опор РУС с позиционированием долота обычно включает в себя гидравлические или механические исполнительные механизмы для направления шарнирно сочлененного блока ориентации по необходимой траектории.
При этом гидравлический забойный двигатель можно использовать в соединении с РУС наклонно-направленного бурения. Конкретно, в некоторых обстоятельствах долото может бурить быстрее, когда РУС и долото имеют привод от гидравлического забойного двигателя, дающий в результате более высокую скорость вращения, чем может дать только одна бурильная колонна. В таком устройстве бурильная колонна может вращаться с относительно низкой скоростью для предотвращения прихвата бурильной колонны в стволе скважины, а приводной вал гидравлического забойного двигателя (т.e. ротора), установленный над компоновкой РУС, осуществляет привод бурового долота с высокой скоростью.
При этом винтовой (объемный) гидравлический забойный двигатель ("ВЗД") преобразует энергию бурового раствора под высоким давлением в механическую энергию вращения бурового долота с использованием принципа Муано, пример которого приведен в Патенте США №4187918. В ВЗД обычно используют статор с винтовыми зубьями, прикрепленный к дальнему концу бурильной колонны, и соответствующий эксцентрический ротор с винтовыми зубьями, соединенный с ним и соединенный через приводной вал с остальной частью КНБК, находящейся под ним. При этом буровые растворы под давлением, проходящие через ствол бурильной колонны, входят в контакт со статором и ротором, таким образом, создавая результирующий крутящий момент на роторе, который затем передается вниз на буровое долото. По статистике, винтовые (объемные) гидравлические забойные двигатели отличаются низкой скоростью, но высоким крутящим моментом, передаваемым на буровое долото. При этом ВЗД, в общем, лучше всего подходят для использования с шарошечными коническими долотами и долотами типа PDC с поликристаллическими алмазными вставками. Дополнительно, вследствие эксцентрического перемещения роторов ВЗД создают значительные поперечные вибрации, которые могут повреждать другие компоненты бурильной колонны.
В отличие от описанного выше в турбинных гидравлических забойных двигателях используют одну или несколько турбинных силовых секций для создания крутящего момента на буровом долоте. Каждая силовая секция состоит из неподвижных лопаток статора и компоновки ротора, содержащей вращающиеся лопатки, механически соединенные с валом ротора. Предпочтительно, силовые секции имеют такое исполнение, что лопатки ступеней статора направляют поток бурового раствора на соответствующие лопасти ротора для создания вращения. Вал ротора, который может являться моноблочным или может содержать два или больше соединенных валов, таких как гибкий вал и выходной вал, концом соединяется с долотом и осуществляет его привод. Таким образом, высокоскоростной поток бурового раствора, подаваемый на лопатки ротора, создает вращение ротора и бурового долота относительно статора. По статистике, турбинные гидравлические забойные двигатели отличаются высокой скоростью, но низким крутящим моментом, передаваемым на буровое долото. Дополнительно к этому, вследствие высокой скорости и по конструктивному исполнению никакие компоненты ротора не перемещаются по эксцентрическому пути, выход мощности турбинного гидравлического забойного двигателя является обычно более ровным и считается подходящим для долот с алмазными резцами. В общем, участок "статора" части бурильной колонны и КНБК компоновки двигателя является прикрепленным ко всей остальной КНБК и вращается с одной с ней скоростью.
Вместе с тем, поскольку турбинные гидравлические забойные двигатели отличаются низким крутящим моментом на выходе, буровые долота, прикрепленные к ним, более подвержены прихвату, когда сталкиваются с некоторыми пластами. Такое происходит, когда крутящий момент, требуемый для вращения долота, становится больше крутящего момента, который способны создавать лопатки двигателя. В случае прихвата бурового долота во время "роторного" бурения (т.e. бурения, при котором только бурильную колонну вращают и используют для привода долота) обычной практикой является приложение большого крутящего момента на поверхности через всю бурильную колонну для освобождения бурового долота. Вместе с тем, в КНБК, в которых используют забойные двигатели, вращение между ротором и статором может предотвращать передачу крутящего момента от бурильной колонны на буровое долото. В результате, единственным крутящим моментом, который может передаваться на прихваченное буровое долото для освобождения долота, является крутящий момент, который способен создавать гидравлический забойный двигатель. Поскольку турбинные гидравлические забойные двигатели создают относительно низкий крутящий момент, они могут быть неспособны проворачивать прихваченное буровое долото.
Имело место несколько попыток создания средства стопорения корпуса двигателя или турбины на роторном валу в случае прихвата долота, включающих в себя описанные в Патентах США №2167019, 4232751, 4253532, 4276944, 4299296 и 4632193. Данные устройства в общем, требуют вмешательства с поверхности, такого как приложение тянущей или толкающей силы к бурильной колонне, или манипуляций с расходом текучей среды для использования устройства стопорения.
Другие документы ссылки описывают устройства с "муфтой одностороннего вращения", имеющие средство автоматического стопорения ротора со статором, когда корпус вращается и долото застревает, и обеспечивают свободное вращение ротора, когда скорость долота больше скорости статора. Данные устройства, вместе с тем, не обеспечивают предотвращения трения средства застопоревания о ротор или статор во время нормальной работы (т.e. когда долото не прихвачено и вал вращается с большей скоростью, чем корпус двигателя). При этом стопорящее средство подвержено быстрому абразивному износу и потере функциональных возможностей, если не изолировано от внешней среды и при этом не защищено от абразивного воздействия бурового раствора. Вместе с тем, при относительно высоких скоростях турбин и некоторых высокоскоростных гидравлических забойных двигателей уплотнения являются весьма ненадежными, так что большинство забойных турбин и гидравлических забойных двигателей конструируют с неизолированными, смазываемыми буровым раствором узлами подшипников.
Необходимо создание забойных двигателей и способов предотвращения прихвата бурового долота и освобождения прихваченного бурового долота. Необходимо иметь возможность приложения крутящего момента от бурильной колонны на статор забойного двигателя и затем от статора двигателя на ротор, не требующего манипуляций с бурильной колонной или расходом. Дополнительно, является предпочтительным создание средства соединения статора двигателя с ротором двигателя, когда долото прихвачено и статор свободен для вращения, и отсоединения данного средства, когда ротор вращается с некоторой скоростью вращения, превышающей скорость вращения статора.
В одном аспекте настоящее изобретение относится к стопорной муфте для селективной передачи крутящего момента от статора скважинного инструмента на ротор скважинного инструмента. Стопорная муфта включает в себя, по меньшей мере, одну стопорную собачку храпового механизма, расположенную на роторе, при этом, по меньшей мере, одна стопорная собачка храпового механизма содержит путь нагружения, ось поворота и центр масс. Дополнительно к этому, по меньшей мере, одна стопорная собачка храпового механизма отклоняется в сцепленное положение смещающим механизмом и, по меньшей мере, одна стопорная собачка храпового механизма передает силу со статора на ротор по пути нагружения, когда находится в сцепленном положении. Дополнительно к этому, центробежная сила поджимает, по меньшей мере, одну стопорную собачку храпового механизма в расцепленное положение, когда ротор вращается со скоростью выше скорости расцепления.
В другом аспекте настоящее изобретение относится к способу селективной передачи крутящего момента от статора забойного бурового двигателя на ротор забойного бурового двигателя. Способ включает в себя размещение муфты между статором и ротором, при этом муфта содержит, по меньшей мере, одну стопорную собачку храпового механизма, поворачивающуюся вокруг оси поворота между сцепленным положением и расцепленным положением, и поворот, по меньшей мере, одной стопорной собачки храпового механизма из сцепленного положения в расцепленное положение центробежной силой, когда скорость ротора превышает скорость расцепления. Дополнительно к этому, способ включает в себя поворот, по меньшей мере, одной стопорной собачки храпового механизма из расцепленного положения в сцепленное положение, когда скорость ротора падает ниже скорости расцепления, и передачу крутящего момента от статора на ротор забойного бурового двигателя через путь нагружения, по меньшей мере, одной стопорной собачки храпового механизма, находящейся в сцепленном положении.
Другие аспекты и преимущества изобретения должны стать ясны из следующего описания и прилагаемой формулы изобретения.
Сущность изобретения поясняется на чертежах.
На Фиг.1A-1C показан скважинный инструмент согласно вариантам осуществления, описанным в данном документе.
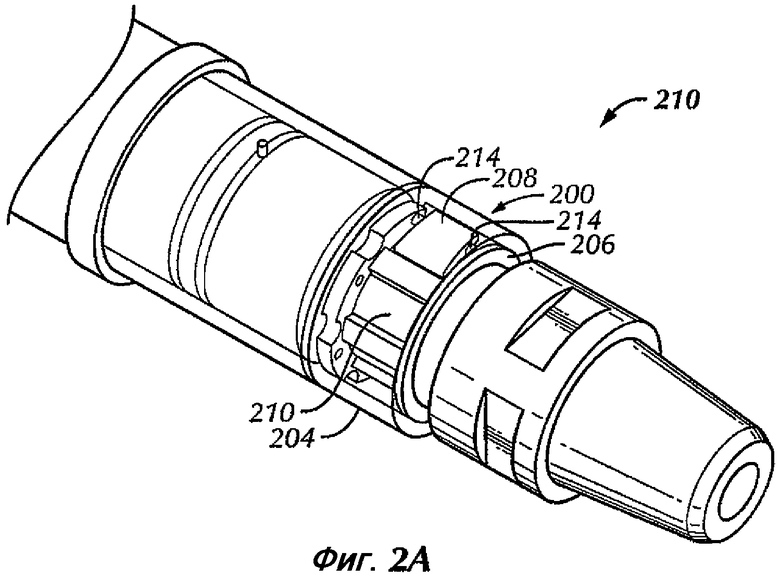
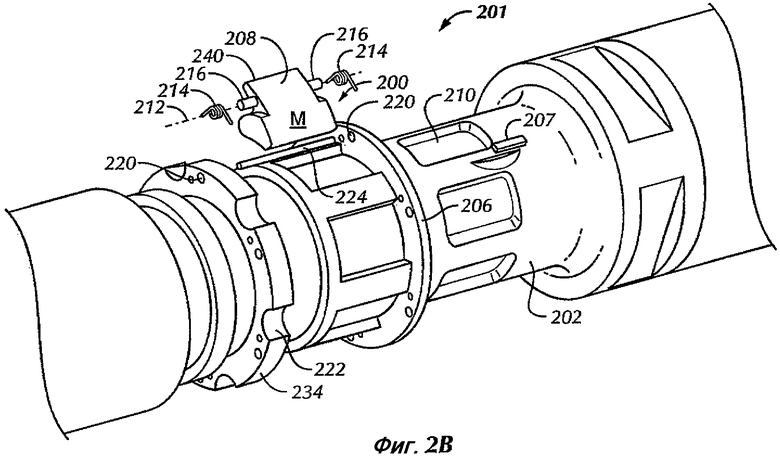
На Фиг.2A и 2B показана стопорная муфта согласно вариантам осуществления, описанным в данном документе.
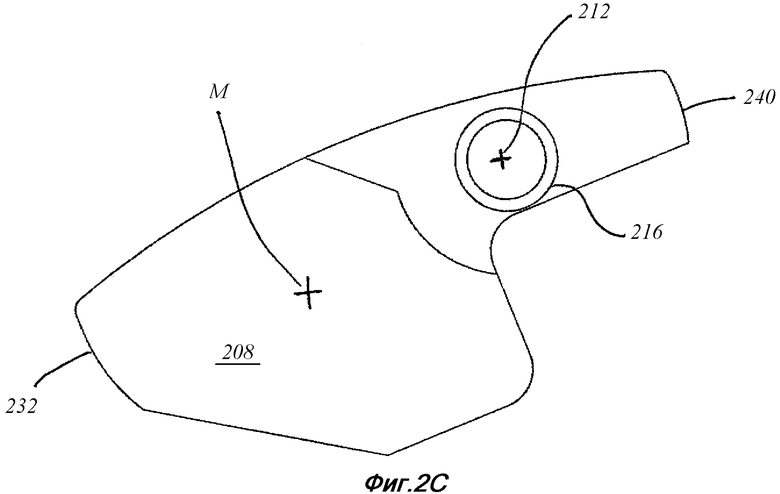
На Фиг.2C показана собачка храпового механизма стопорной муфты по Фиг.2A и 2B согласно вариантам осуществления, описанным в данном документе.
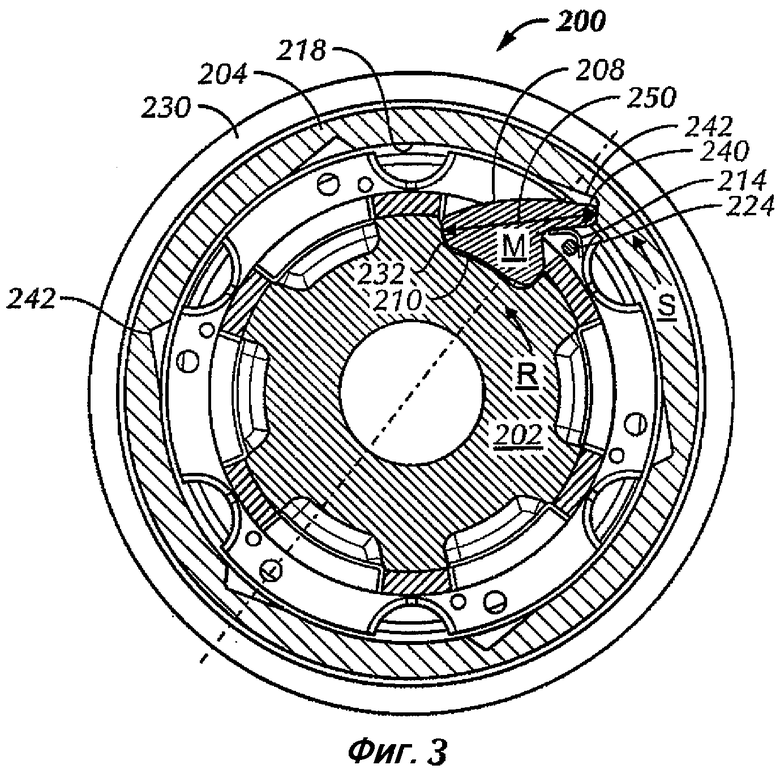
На Фиг.3 показано сечение стопорной муфты в сцепленном положении согласно вариантам осуществления, описанным в данном документе.
На Фиг.4 показано сечение стопорной муфты в расцепленном положении согласно вариантам осуществления, описанным в данном документе.
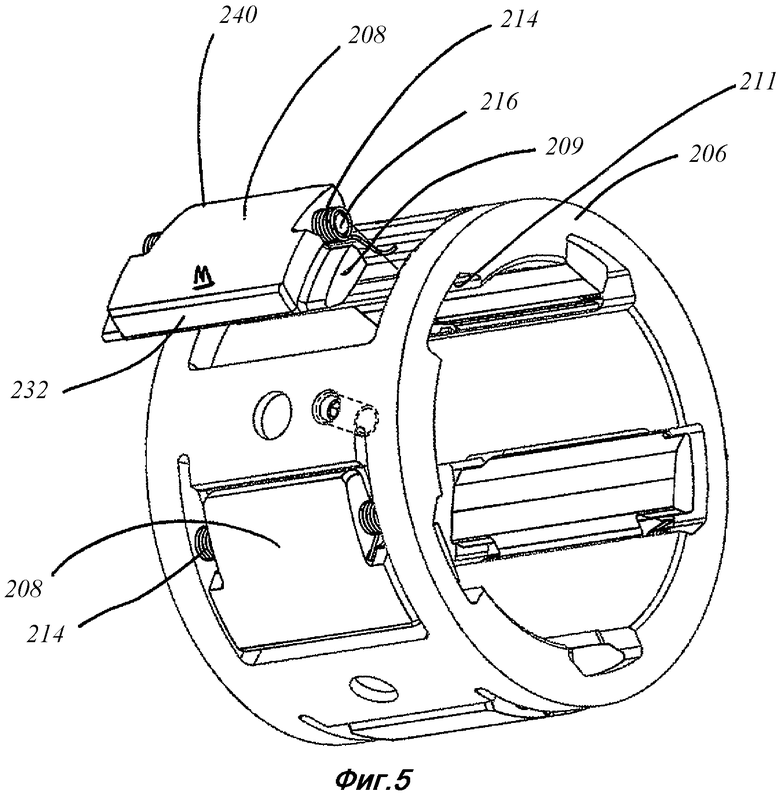
На Фиг.5 показан изометрический вид стопорной муфты согласно вариантам осуществления, описанным в данном документе.
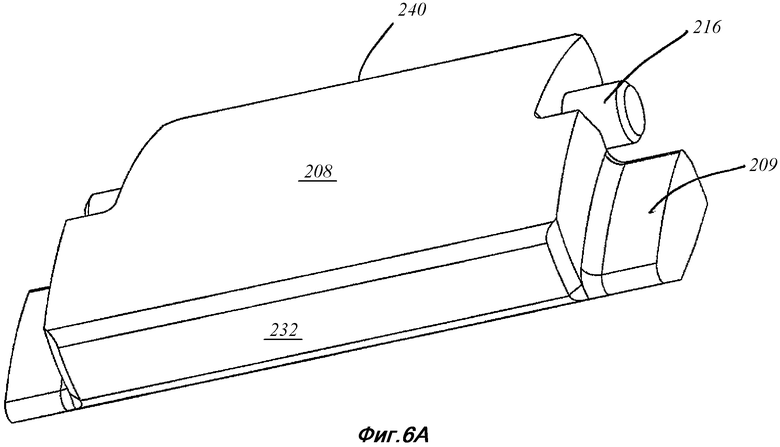
На Фиг.6A и 6B показана собачка храпового механизма стопорной муфты Фиг.5 согласно вариантам осуществления, описанным в данном документе.
В одном аспекте варианты осуществления, описанные в данном документе, относятся к роторным скважинным инструментам. Конкретнее, варианты осуществления, описанные в данном документе, относятся к компоновкам забойных двигателей привода бурового долота. Конкретнее, варианты осуществления, описанные в данном документе, относятся к стопорной муфте для селективного соединения ротора со статором скважинного инструмента для привода бурового долота.
На Фиг.1A-C показана компоновка 5, несущая турбинный гидравлический забойный двигатель согласно одному варианту осуществления настоящего изобретения. Конкретно, в показанной на Фиг.1A компоновке 5 забойный двигатель является турбинным двигателем; вместе с тем, специалисту в данной области техники должно быть ясно, что стопорящие механизмы согласно варианту осуществления настоящего изобретения можно также прикреплять к винтовым (объемным) гидравлическим забойным двигателям или электродвигателям, корпус (т.e. статор) которых обычно имеет общую черту в том, что вращается отдельно от ротора. На Фиг.1A представлена компоновка, несущая турбинный двигатель с верхним соединением 15, соединяющимся с турбинной силовой секцией, и нижним соединением 16, соединяющимся с буровым долотом (не показано). Корпус 2 может содержать несколько рабочих компонентов компоновки 5 турбинного двигателя (такие, как опорные подшипники, упорные подшипники и т.д.), которые специалист в данной области техники может сконструировать без дополнительного описания. Предпочтительно, верхнее соединение 15 неподвижно закреплено относительно корпуса 2 для вращения с ним, а нижнее соединение 16 неподвижно закреплено относительно ротора 1 для вращения с ним (видно на Фиг.1B и 1C).
Турбинный гидравлический забойный двигатель компоновки 5 работает от перекачки бурового раствора через бурильную колонну в кольцевое пространство 10. Поток бурового раствора направлен через множество турбинных лопаток (размещенных на участке турбинной силовой секции, не показано, над верхним соединением 15) для создания крутящего момента, действующего на ротор 1. После использования на турбинных лопатках буровой раствор выходит из турбины гидравлического забойного двигателя компоновки 5 через второе кольцевое пространство 11, которое продолжается через нижнее соединение 16. Специалист в данной области техники может сконструировать подходящие участки двигателя для создания вращательного усилия. Для селективной передачи крутящего момента от корпуса 2 на ротор 1 варианты осуществления, описанные в данном документе, используют стопорный механизм для селективного создания сцепления между корпусом 2 и ротором 1 для совместного вращения. В одном или нескольких вариантах осуществления стопорный механизм может являться стопорной муфтой, которую можно называть муфтой одностороннего вращения.
Как описано выше, передача крутящего момента с корпуса 2 на ротор 1 может быть необходима, когда забойный двигатель застревает во время бурения или когда возникает прихват бурового долота. На Фиг.1C показан детальный вид стопорного механизма согласно вариантам осуществления, описанным в данном документе. В данном варианте осуществления стопорный механизм расположен на нижнем конце ротора 1 (положение турбинного гидравлического забойного двигателя компоновки 5 показано на Фиг.1A). Одним преимуществом размещения стопорного механизма на нижнем конце ротора 1 является то, что ротор 1 может являться наиболее прочным на своем нижнем конце. Относительный размер верхнего конца ротора 1 показан на Фиг.1B.
В некоторых вариантах осуществления нижний конец ротора 1 может быть способен выдерживать крутящий момент с величиной в три-четыре раза больше, чем верхний конец. Расположение стопорного механизма на нижнем конце также предотвращает передачу крутящего момента большой величины через другие, более слабые участки ротора 1. Вместе с тем, специалисту в данной области техники должно быть ясно, что стопорный механизм можно также располагать в других местах (включающих в себя верхний конец) забойного двигателя без отхода от объема вариантов осуществления, описанных в данном документе.
На Фиг.1C показана стопорная муфта 20, которую можно использовать согласно одному варианту осуществления настоящего изобретения. Стопорная муфта 20 выполнена с возможностью сцепления на основе относительного вращения между ротором 1 и корпусом 2. Когда забойный двигатель работает нормально во время бурения, ротор 1 должен вращаться с более высокой скоростью (например, 1000 оборотов в минуту), чем корпус 2, который может вращаться, по существу, с постоянной низкой скоростью (например, 40 оборотов в минуту). Если вращение бурового долота становится ограниченным, ротор 1 замедляет или прекращает вращение, но корпус, приводимый во вращение со скоростью вращения бурильной колонны, должен продолжать вращать ротор.
Для предотвращения застревания бурового долота и двигателя можно выполнить стопорную муфту 20 для сцепления и приложения крутящего момента от корпуса 2 (т.e. статора) к ротору 1, когда скорость вращения ротора 1 не превышает скорости вращения корпуса (т.e. когда относительное вращение между корпусом 2 и ротором 1 является нулевым). Когда такое происходит, стопорная муфта должна механически сцеплять, или соединять, вращающийся корпус с ротором и, с выполнением указанного, передавать вращение на долото и освобождать его от прихвата. Следом за сцеплением, если буровое долото освобождено и вращение ротора 1 можно восстанавливать приводом от турбинных лопаток, стопорная муфта 20 должна вначале механически, затем под действием центробежной силы, отцеплять ротор 2 от корпуса 1 и, таким образом, обеспечивать продолжение нормальной работы двигателя. Поскольку стопорная муфта 20 выполнена с возможностью работы как храповой механизм и автоматически расцепляться с превышением ротором 1 скорости вращения бурильной колонны и корпуса, нет необходимости поднимать бурильную колонну для ремонта или переустановки компоновки двигателя.
Дополнительно к этому, поскольку муфта относительно корпуса должна работать как храповой механизм, в любое время, когда скорость ротора превышает скорость корпуса, при относительно низких скоростях ротора, средство сцепления муфты должно создавать трение на корпусе, вызывая износ вследствие абразивного характера бурового раствора. Для предотвращения чрезмерного износа муфта выполнена с возможностью поддержания постоянного расцепления при достижении порога скорости вращения. Более детальное описание стопорной муфты 20 приведено ниже.
На Фиг.2A и 2B (на Фиг.2B показан разобранный вид Фиг.2A) стопорная муфта 200 показана согласно вариантам осуществления настоящего изобретения. Стопорная муфта 200 выполнена с возможностью селективного сцепления ротора 202 со статором 204 (например, корпусом 2 на Фиг.1) роторного скважинного инструмента 201. Специалисту в данной области техники должно быть ясно, что скважинный инструмент 201 может являться любым роторным инструментом, известным в технике, включающим в себя, без ограничения, электродвигатель, турбинный гидравлический забойный двигатель или винтовой (объемный) гидравлический забойный двигатель. Показанная в варианте осуществления стопорная муфта 200 включает в себя несущую компоновку 206, установленную на роторе 202. Хотя несущая компоновка 206 показана выполненной в виде одной цилиндрической детали, которая может сцепляться с ротором 206, следует понимать, что компоновку можно альтернативно выполнить из нескольких деталей, соединенных вокруг ротора 206. Дополнительно к этому, одна или несколько шпонок 207 могут быть вставлены между несущей компоновкой 206 и ротором 202 для вращательного закрепления несущей компоновки 206 на месте на роторе 202. Альтернативно отдельная несущая компоновка может не требоваться вообще с ротором, содержащим все конструкции, необходимые для удержания стопорных собачек 208 храпового механизма.
Дополнительно, несущая компоновка 206 включает в себя одну или несколько стопорных собачек 208 храпового механизма расположенных по окружности вокруг несущей компоновки 206. При этом собачки 208 храпового механизма предпочтительно выполнены с возможностью сцепления с множеством выемок 210, выполненных во внешней периферии ротора 202. Собачки 208 храпового механизма могут сцепляться с несущей компоновкой 206 любым способом, известным в технике так, что каждая собачка 208 храпового механизма может поворачиваться вокруг оси 212 поворота. Например, цилиндрические боковые шпильки 216 можно вставить и закрепить в соответствующих отверстиях 220, выполненных в несущей компоновке 206. Смещающие элементы 214 можно расположить между боковыми шпильками 216 каждой собачки 208 храпового механизма и несущей компоновкой 206, для смещения собачек 208 храпового механизма внутрь к выемкам 210 в "сцепленное" положении, так что собачки 208 храпового механизма сцепляются с соответствующими выемками 210, выполненными в роторе 202. Дополнительно к этому, как показано, концевой фланец 234 носителя присоединен за носителем 206 собачек храпового механизма и собачками 208 храпового механизма для закрепления собачек 208 храпового механизма в несущей компоновке 206 собачек храпового механизма. При этом концевой фланец 234 носителя включает в себя соответствующие отверстия 220 для приема цилиндрических боковых шпилек 216 собачек 208 храпового механизма. Кроме того, стопорный палец 224 проходит между концевым фланцем 234 носителя и носителем 206 собачек храпового механизма для предотвращения чрезмерного поворота собачек 208 храпового механизма вокруг оси 212 поворота.
В альтернативном варианте осуществления цилиндрические боковые шпильки 216 могут не вставляться в отверстия 220. Вместо этого собачки 208 храпового механизма вставляют в несущую компоновку 206, так что цилиндрические боковые шпильки 216 расположены вблизи внутренней поверхности несущей компоновки 206. Как показано на Фиг.5, в данном варианте осуществления собачки 208 храпового механизма включают в себя, по меньшей мере, один выступающий участок 209, расположенный, по меньшей мере, на одной стороне собачки 208 храпового механизма. Выступающий участок 209 выполнен с возможностью сцепления с соответствующим подрезом 211, выполненным на внутреннем диаметре несущей компоновки 206. Таким образом, в данном варианте осуществления собачки 208 храпового механизма могут вращаться вокруг, по меньшей мере, двух осей поворота (A и B на Фиг.6B) в несущей компоновке 206, описанной детально ниже. Сцепление выступающего участка 209 с соответствующим подрезом 211 ограничивает вращение собачки 208 храпового механизма в несущей компоновке 206, при этом предотвращая излишний поворот собачки 208 храпового механизма.
В одном варианте осуществления смещающие элементы 214 могут являться, например, торсионными пружинами, расположенными вокруг боковых шпилек 216. В альтернативном варианте осуществления можно выполнить вырезы 222 в концевом фланце 234 носителя для направления потока буровых растворов (т.e. промывочных растворов) поперек собачек 208 храпового механизма так, что поток текучей среды содействует смещению собачек 208 храпового механизма внутрь к сцепленному положению. Аналогично, задние стороны собачек 208 храпового механизма можно выполнить для отклонения продольного потока бурового раствора в поперечном направлении для создания радиальной силы.
В одном варианте осуществления смещающие элементы 214 можно выбрать такими, что стопорные собачки 208 храпового механизма смещаются к сцепленному положению с заданным крутящим моментом, созданным смещающим элементом 214. Когда ротор 202 вращается с относительно низкой скоростью, сила пружины смещающих элементов 214 поджимает передние концы 232 стопорных собачек 208 храпового механизма в соответствующие выемки 210 на роторе 202 и поджимает задние концы 240 альтернативно в контакт со стопорящими V-образными канавками 242 на корпусе 204 и с внутренним диаметром 218 корпуса. Когда передние концы 240 собачек 208 храпового механизма поворачиваются за стопорящие V-образные канавки 242, стопорящие V-образные канавки 242 действуют как кулачковые поверхности, механически выводя собачки 208 храпового механизма из стопорящих V-образных канавок 242. При низких скоростях при этом собачки 208 храпового механизма просто функционируют, как в обычном храповом механизме, в котором собачки 208 храпового механизма попеременно находятся между сцепленным и расцепленным положениями. Каждая собачка храпового механизма 208 имеет центр масс, в общем, указанный точкой M. Как показано, центр М масс смещен на расстояние D относительно оси 212 поворота. Вращение ротора 202 создает центробежную силу, действующую на центр М масс. Поскольку центр М масс смещен от оси 212 поворота (на Фиг.2B) или оси В поворота (Фиг.6B), центробежная сила в результате дает крутящий момент, приложенный к стопорящим собачкам 208 храпового механизма, крутящий момент в направлении, противоположном крутящему моменту, приложенному смещающим элементом 214. Поэтому, когда скорость вращения ротора 202 увеличивается, центробежная сила, действующая на каждую собачку 208 храпового механизма на центре М масс, увеличивается, и получающийся в результате крутящий момент увеличивается соответственно. Когда крутящий момент в результате действия центробежной силы на каждой собачке 208 храпового механизма превосходит крутящий момент, создаваемый силой пружины смещающих элементов 214, собачки 208 храпового механизма больше не поджимаются в контакт со стопорящими V-образными канавками 242 и внутренним диаметром 218 корпуса, при этом поддерживается расцепление стопорной муфты 200 посредством центробежного действия, противодействующего механическому действию храпового механизма. Центробежную силу можно определить следующей формулой:
F центробежная = М·r·ω 2 (1),
где M - масса собачки храпового механизма, r - расстояние от центра масс собачки храпового механизма до центра вала турбины, ω - скорость вращения вала турбины. Стопорный палец 224 предотвращает излишний поворот собачек 208 храпового механизма под действием центробежной силы из расцепления с выемками 210. Крутящий момент в результате действия центробежной силы можно определить следующей формулой:
T центробежный = F центробежная ·D (2)
На Фиг.3 и 4 показано сечение стопорной муфты 200 (вид снизу) в сцепленном и расцепленном положении соответственно. Во время операций бурения статор 204 вращается под действием привода от бурильной колонны в направлении вращения S, указанном стрелкой, и ротор 202 вращается в направлении вращения R, указанном стрелкой. Как показано, направления вращения R и S являются одинаковыми. В нормальных условиях угловая скорость вращения S значительно меньше угловой скорости вращения R. Обычно, во время бурения, ротор 202 вращается с гораздо большей скоростью (например, 400-2000 об/мин) с более низким крутящим моментом, а статор 204 и, соответственно, корпус 230 вращаются с более низкой скоростью (например, около 10-100 об/мин) и более высоким крутящим моментом остальной части бурильной колонны.
Как рассмотрено выше и показано на Фиг.2A-2C, смещающие элементы 214, расположенные на стопорных собачках 208 храпового механизма, смещают стопорные собачки 208 храпового механизма к сцепленному положению в соответствующие выемки 242, выполненные в статоре 204. Когда скорость вращения R ротора 202 увеличивается, центробежная сила, действующая на центр М масс относительно оси 212 поворота стопорных собачек 208 храпового механизма, увеличивается согласно формуле 1, показанной выше. Когда скорость ротора 202 достигает скорости расцепления, центробежная сила, действующая на центр М масс стопорных собачек 208 храпового механизма, больше силы пружины смещающих элементов 214, поджимающих стопорные собачки 208 храпового механизма к сцепленному положению. При скоростях больше или равных скорости расцепления стопорные собачки 208 храпового механизма поворачиваются наружу вокруг оси 212 поворота и задние кромки 240 поднимаются от внутреннего диаметра 218 корпуса.
В варианте осуществления, показанном на Фиг.5, 6A и 6B, смещающие элементы 214, расположенные на стопорных собачках 208 храпового механизма, отклоняют стопорные собачки 208 храпового механизма к сцепленному положению в соответствующие выемки 242, выполненные в статоре 204 (Фиг.3). Когда увеличивается скорость вращения ротора 202 в направлении вращения R, центробежная сила, действующая на центр М масс, увеличивается согласно формуле 1, показанной выше. В данном варианте осуществления, вместе с тем, собачка храпового механизма 208 поворачивается вокруг различных осей поворота. Таким образом, ось поворота можно называть в данном документе динамической осью поворота. На Фиг.6B показан вид сбоку собачки 208 храпового механизма согласно вариантам осуществления, описанным в данном документе. На низких скоростях собачка 208 храпового механизма вращается вокруг оси А поворота. В данном варианте осуществления ось А поворота соответствует линии контакта между передней кромкой 232 собачки 208 храпового механизма и ротором 202.
Когда скорость ротора 202 достигает скорости расцепления, центробежная сила, действующая на центр М масс стопорных собачек 208 храпового механизма, превосходит силу пружин смещающих элементов 214. Стопорные собачки 208 храпового механизма перемещаются радиально наружу до контакта выступающих участков 209 с подрезками 211 в несущей компоновке 206. После вступления выступающих участков 209 в контакт с подрезками 211 собачка 208 храпового механизма поворачивается вокруг линии контакта, указанной как ось В поворота, между участками 209 выступа и подрезкой 211. Таким образом, при скоростях больше или равных скорости расцепления стопорные собачки 208 храпового механизма поворачиваются наружу вокруг оси В поворота, и задние кромки 240 поднимаются от внутреннего диаметра 218 корпуса. Таким образом, в данном варианте осуществления ось поворота собачки 208 храпового механизма может перемещаться или изменяться, при этом обеспечивая большее перемещение собачки 208 храпового механизма в несущей компоновке 206 и предотвращая передачу сил сцепления на несущую компоновку 206. Дополнительно, специалисту в данной области техники должно быть ясно, что может существовать 1, 2 или больше осей поворота, вокруг которых поворачивается собачка 208 храпового механизма в зависимости от геометрии собачки 208 храпового механизма, несущей компоновки 206 и выступающих участков 209.
Следует констатировать, что скорость расцепления включает в себя вращение статора 204 и ротора 202 вместе. Поскольку статор 204 имеет направление вращения S, и ротор 202 имеет направление вращения R, и ротор 202 приводится в движение статором 204, суммарная скорость вращения (т.e. R+S) должна вызывать центробежную силу, действующую на центр М масс собачки храпового механизма. Скорость вращения R ротора должна быть определена как скорость ротора относительно статора. Поэтому, если бурильная колонна вращается со скоростью 100 об/мин и скорость расцепления стопорной муфты 200 составляет 400 об/мин, стопорная муфта должна механически задерживать движение при помощи храпового механизма, когда величина скорости вращения R ротора находится между нулем и 300 об/мин, и должна поддерживать расцепление, когда скорость вращения R ротора превышает 300 об/мин. При этом специалисту в данной области техники должно быть ясно, что смещающие элементы 214 можно выбирать так, что стопорные собачки 208 храпового механизма поддерживают расцепление при конкретной скорости расцепления ротора 202. Например, в одном варианте осуществления стопорные собачки 208 храпового механизма могут поддерживать расцепление с соответствующими выемками 210 при суммарной скорости ротора приблизительно 300-400 об/мин. Дополнительно к этому, специалист в данной области техники должен также понимать, что геометрию и свойства материала (например, плотность) стопорных собачек 208 храпового механизма можно изменять для получения конкретной скорости расцепления. Конкретно, массу и положение центра М масс относительно оси 212 поворота можно изменять для получения конкретной скорости расцепления. При условии некоторых габаритных ограничений можно предпочтительно изготавливать стопорные собачки 208 храпового механизма из материала высокой плотности, такого как карбид вольфрама, для увеличения их массы.
Показанное на Фиг.3 и 4 сцепление стопорной муфты 200 рассмотрено ниже. В случае прихвата бурового долота (не показано) или замедления его скорости вращения стопорная муфта 200 сцепляется и передает крутящий момент от статора 204 на ротор 202 для привода долота, проходящего через пласт, следующим способом. При снижении скорости ротора 202 центробежная сила, действующая на стопорные собачки 208 храпового механизма, уменьшается. Когда суммарная скорость вращения ротора 202 замедляется до величины меньше скорости расцепления, крутящий момент, возникающий в результате центробежной силы, меньше крутящего момента от смещающих элементов 214, и стопорные собачки 208 храпового механизма поворачиваются вокруг соответствующих осей поворота (212, Фиг.2B, или A, B, Фиг.6B) под действием силы пружин смещающих элементов 214, при этом поджимая передние концы 240 стопорных собачек 208 храпового механизма в контакт с внутренним диаметром 218 статора 204 и в стопорящие V-образные канавки 242.
Когда вращение ротора 202 продолжает замедляться и передние кромки 232 стопорных собачек 208 храпового механизма перемещаются в соответствующие выемки 210, передние концы 240 стопорных собачек 208 храпового механизма выступают радиально наружу в контакт с внутренним диаметром 218 статора 204 и стопорящими V-образными канавками 242. После выдвижения, поскольку скорость вращения R ротора 202 превышает скорость вращения S статора 204, передние концы 240 стопорных собачек 208 храпового механизма должны "осуществлять привод с помощью храпового механизма" через множество стопорящих V-образных канавок 242, выполненных на внутреннем диаметре статора 204. Поскольку суммарная скорость ротора меньше скорости расцепления, стопорные собачки 208 храпового механизма должны сцепляться, когда скорость вращения R ротора (как определено выше, относительно скорости вращения S статора) является нулевой. Условие, когда скорость вращения R ротора, определенная таким образом, является нулевой, называют "скоростью сцепления".
Стопорящие V-образные канавки 242 предпочтительно сконструированы так, что передние концы 240 собачек 208 храпового механизма не мешают вращению ротора 202, когда он вращается быстрее статора 204. Вместе с тем, когда ротор 202 замедляет вращение до скорости сцепления, стопорные собачки 208 храпового механизма сцепляются с соответствующими выемками 210 ротора 202, когда стопорящие V-образные канавки 242 статора 204 сцепляются с передними концами 240 стопорных собачек 208 храпового механизма. После сцепления вращающая сила (т.e. крутящий момент) передается от статора 204 на ротор 202 по пути 250 нагружения, проходящему через собачки 208 храпового механизма. Предпочтительно, собачки 208 храпового механизма выполнены так, что путь 250 нагружения проходит, по существу, прямолинейно через стопорную собачку 208 храпового механизма без изгибающих или сдвигающих нагрузок. Соответственно, статор 204 создает достаточный крутящий момент для привода ротора 202 и, таким образом, для бурения буровым долотом (не показано) через пласт. После того как сложный пласт пробурен (или осевая нагрузка на долото уменьшена), двигатель привода долота получает возможность вновь ускорять вращение, таким образом, механически расцепляя стопорную муфту 200 и автоматически входя в режим работы храпового механизма после превышения скоростью вращения R ротора скорости вращения S статора.
Преимущественно, бурение с использованием вариантов осуществления настоящего изобретения помогает предотвращать прихват бурового долота при использовании в соединении с забойным двигателем. Дополнительно к этому, если возникает прихват долота, варианты осуществления настоящего изобретения можно использовать для освобождения бурового долота. Обычно при бурении с использованием забойного двигателя бурильную колонну вращают с малой скоростью, а вал забойного двигателя, вращающий буровое долото, вращается с более высокой скоростью. В нормальных условиях стопорный механизм согласно вариантам осуществления настоящего изобретения должен оставаться расцепленным. Вместе с тем, в ситуации, где забойный двигатель застревает или скорость уменьшается ниже определенного предела, стопорный механизм может сцепляться так, что с медленным вращением бурильная колонна может передавать крутящий момент на застрявшее буровое долото. Например, если бурильная колонна вращается на поверхности ротором или верхним приводом при 100 об/мин, а забойный двигатель вращается при 200 об/мин, стопорная муфта согласно вариантам осуществления, описанным в данном документе, должна сцепляться, когда забойный двигатель застревает с падением скорости вращения до равной 100 об/мин. В данной точке крутящий момент от ротора или верхнего привода должен передаваться на вал для поддержания вращения долота относительно пласта. После проходки долотом проблемного пласта забойный двигатель может возобновлять работу и возвращаться к более высокой скорости вращения, при которой должна автоматически расцепляться стопорная муфта, с первоначальным механическим расцеплением храповым механизмом, затем полностью поддерживая расцепление с помощью центробежной силы.
Хотя настоящее изобретение описано для ограниченного числа вариантов осуществления, специалистам в данной области техники, использующим изобретение, должно быть ясно, что можно разработать другие варианты осуществления, не отходящие от объема настоящего изобретения. Соответственно, объем настоящего изобретения ограничен только прилагаемой формулой изобретения.





Группа изобретений относится к области бурения, а именно к средству соединения статора двигателя с ротором. Стопорная муфта для селективной передачи крутящего момента от статора скважинного инструмента на ротор скважинного инструмента, содержащая, по меньшей мере, одну стопорную собачку храпового механизма, расположенную на роторе, которая содержит путь нагружения, по меньшей мере, одну ось поворота и центр масс, выполнена с возможностью отклонения в сцепленное положение смещающим механизмом и передает силу со статора на ротор по пути нагружения, когда находится в сцепленном положении, а центробежная сила поджимает ее в расцепленное положение, когда ротор вращается со скоростью выше скорости расцепления. Обеспечивает предотвращение прихвата и освобождение прихваченного бурового долота. 2 н. и 20 з.п. ф-лы, 11 ил.
1. Стопорная муфта для селективной передачи крутящего момента от статора скважинного инструмента на ротор скважинного инструмента, содержащая:
по меньшей мере, одну стопорную собачку храпового механизма, расположенную на роторе, при этом, по меньшей мере, одна стопорная собачка храпового механизма содержит путь нагружения, по меньшей мере, одну ось поворота и центр масс;
при этом, по меньшей мере, одна стопорная собачка храпового механизма выполнена с возможностью отклонения в сцепленное положение смещающим механизмом;
при этом, по меньшей мере, одна стопорная собачка храпового механизма передает силу со статора на ротор по пути нагружения, когда находится в сцепленном положении; а
центробежная сила поджимает, по меньшей мере, одну стопорную собачку храпового механизма в расцепленное положение, когда ротор вращается со скоростью выше скорости расцепления.
2. Стопорная муфта по п.1, в которой, по меньшей мере, одна стопорная собачка храпового механизма выполнена с возможностью поворота от сцепленного положения в расцепленное положение вокруг, по меньшей мере, одной оси поворота.
3. Стопорная муфта по п.1, в которой, по меньшей мере, одна стопорная собачка храпового механизма выполнена с возможностью находиться в сцепленном положении, когда суммарная скорость вращения ротора не больше скорости вращения статора и меньше скорости расцепления.
4. Стопорная муфта по п.3, в которой, по меньшей мере, одна стопорная собачка храпового механизма выполнена с возможностью задерживать движение храповым механизмом, когда суммарная скорость вращения ротора больше скорости вращения статора и меньше скорости расцепления.
5. Стопорная муфта по п.3, в которой скорость сцепления одинакова со скоростью расцепления.
6. Стопорная муфта по п.3, в которой скорость сцепления меньше скорости расцепления.
7. Стопорная муфта по п.1, в которой смещающий механизм содержит торсионные пружины.
8. Стопорная муфта по п.7, в которой торсионные пружины подобраны для перемещения, по меньшей мере, одной стопорной собачки храпового механизма в сцепленное положение, когда ротор вращается медленнее скорости сцепления.
9. Стопорная муфта по п.1, в которой смещающий механизм содержит поток текучей среды поперек, по меньшей мере, одной стопорной собачки храпового механизма.
10. Стопорная муфта по п.1, в которой скважинный инструмент является винтовым гидравлическим забойным двигателем.
11. Стопорная муфта по п.1, в которой скважинный инструмент является турбинным гидравлическим забойным двигателем.
12. Стопорная муфта по п.1, в которой скважинный инструмент является электродвигателем.
13. Стопорная муфта по п.1, в которой статор закреплен на бурильной колонне для вращения вместе с ней.
14. Стопорная муфта по п.1, в которой ротор содержит множество соответствующих выемок, выполненных с возможностью приема, по меньшей мере, одной стопорной собачки храпового механизма, когда находится в сцепленном положении.
15. Стопорная муфта по п.1, в которой внутренний диаметр статора содержит множество стопорных V-образных канавок, выполненных с возможностью приема переднего конца, по меньшей мере, одной стопорной собачки храпового механизма.
16. Стопорная муфта по п.15, в которой передний конец, по меньшей мере, одной стопорной собачки храпового механизма выполнен с возможностью задерживать движение храповым механизмом поперек стопорных V-образных канавок, когда ротор вращается со скоростью больше скорости статора, но меньше скорости расцепления.
17. Стопорная муфта по п.15, в которой передний конец, по меньшей мере, одной стопорной собачки храпового механизма выполнен с возможностью сцепления с одной из стопорных V-образных канавок, когда ротор вращается со скоростью меньше или равной скорости вращения статора.
18. Стопорная муфта по п.1, в которой, по меньшей мере, одна стопорная собачка храпового механизма содержит материал с плотностью выше, чем у стали.
19. Стопорная муфта по п.1, в которой стопорная собачка храпового механизма содержит динамическую ось поворота.
20. Стопорная муфта по п.19, в которой динамическая ось поворота перемещается из первого положения во второе положение на основе изменения скорости вращения ротора.
21. Способ селективной передачи крутящего момента от статора забойного бурового двигателя на ротор забойного бурового двигателя, способ, в котором:
размещают муфту между статором и ротором, при этом муфта содержит, по меньшей мере, одну стопорную собачку храпового механизма, поворачивающуюся вокруг оси поворота между сцепленным положением и расцепленным положением;
осуществляют поворот, по меньшей мере, одной стопорной собачки храпового механизма из сцепленного положения в расцепленное положение под действием центробежной силы, когда скорость ротора превышает скорость расцепления;
осуществляют поворот, по меньшей мере, одной стопорной собачки храпового механизма из расцепленного положения в сцепленное положение, когда скорость ротора падает ниже скорости расцепления; и
передают крутящий момент от статора на ротор забойного бурового двигателя через путь нагружения, по меньшей мере, одной стопорной собачки храпового механизма, когда она находится в сцепленном положении.
22. Способ по п.21, в котором смещающие элементы поджимают, по меньшей мере, одну стопорную собачку храпового механизма в сцепленное положение.
| Муфта для соединения ротора со статором в забойном двигателе | 1978 |
|
SU737615A1 |
| 0 |
|
SU401795A1 | |
| Устройство для соединения со статором в забойном двигателе | 1972 |
|
SU473792A1 |
| Устройство для соединения роторазАбОйНОгО дВигАТЕля CO CTATOPOM | 1979 |
|
SU827743A1 |
| Храповая обгонная муфта | 1984 |
|
SU1218195A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ БАЛЛОНОВ | 2000 |
|
RU2167019C1 |
| GB 2055927 А, 11.03.1981 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

