Способ интегрированной адаптивной навигации мобильных абонентов и устройство для его реализации относится к технике связи и может найти применение для обеспечения коммуникации мобильных абонентов и определения их местоположения.
Известен способ оценки местоположения пользовательского устройства беспроводной связи с множеством точек доступа, при котором определяют потерю в канале между пользовательским устройством и одной из множества точек доступа и потерю в канале между каждой из множества точек доступа, вычисляют корреляционное значение для одной из множества точек доступа, которое является показателем корреляции между точкой доступа и каждой из множества точек доступа и оценивают местоположение пользовательского устройства (RU, патент №2527483, G01S 5/02, H04W 64/00, 2010 г.). Недостаток данного способа оценки местоположения состоит в том, что динамические характеристики в радиочастотном окружении пользовательских устройств могут изменяться и увеличить ошибку в оценке местоположения.
Известен способ получения оценки местоположения приемника на основе множества измерений параметра, каждое из которых получено на основе корреляционной функции, которая в свою очередь получена посредством нахождения корреляции сигнала, принятого приемником, с идентификационным кодом, уникальным образом идентифицирующим передатчик, находящийся в зоне видимости приемника (RU, заявка на изобретение №2004133676, G01S 11/00, 2004 г.). Недостаток данного способа заключается в том, что оценка местоположения приемника на основе множества измерений параметра требует большого реального времени.
Известна система определения местоположения сотового телефона, которая оценивает местоположение сотового телефона посредством создания сетки теоретических пунктов, охватывающей определенный географический район, вычисления теоретических величин времени задержки для множества пар сотовых станций, вычисления разности наименьших квадратов на основе теоретических значений времени задержки и измеренных значений времени задержки для множества пар сотовых станций, поиска по всей сетке теоретических пунктов и определения оптимальной теоретической широты и долготы, начиная с которой выполняется итерация по методу линеаризированных взвешенных наименьших квадратов для определения фактических широты и долготы с заданной точностью (RU, патент №2107925, G01S 3/02, 1994 г.). Недостаток данной системы определения местоположения сотового телефона состоит в сложности технической реализации системы.
Наиболее близким техническим решением являются способ и система позиционирования мобильного терминала внутри зданий на основе глонасс-подобного сигнала, заключающиеся в том, что организуют мобильную радиосвязь между мобильными абонентами «каждый с каждым», причем каждый навигационно-связной терминал мобильного абонента определяет свои навигационные координаты по системе глобальной спутниковой навигации ГЛОНАСС (GPS) или посредством определения расстояния между навигационно-связным терминалом мобильного абонента не менее чем с тремя ретрансляторами, каждый из которых определяет свои навигационные координаты по системе глобальной спутниковой навигации ГЛОНАСС (GPS) или по местным ориентирам путем ручного ввода координат, при этом определяют расстояния между навигационно-связным терминалом мобильного абонента и ретрансляторами путем измерения временных задержек распространения радиосигнала и последующего вычисления расстояний между ними (RU, патент №2533202, G01S 5/02, H04B 7/216, 2012 г.).
Технический результат от использования предложенного способа состоит в том, что введенные признаки позволяют при «плохой видимости» спутников нагружать функции ретрансляторов на навигационно-связные терминалы мобильных абонентов, которые могут стать источником локального навигационного поля.
Технический результат достигается тем, что в способе интегрированной адаптивной навигации мобильных абонентов, заключающемся в том, что организуют мобильную радиосвязь между мобильными абонентами «каждый с каждым», причем каждый навигационно-связной терминал мобильного абонента определяет свои навигационные координаты по системе глобальной спутниковой навигации ГЛОНАСС (GPS) или посредством определения расстояния между навигационно-связным терминалом мобильного абонента не менее чем с тремя ретрансляторами, каждый из которых определяет свои навигационные координаты по системе глобальной спутниковой навигации ГЛОНАСС (GPS) или по местным ориентирам путем ручного ввода координат, при этом определяют расстояния между навигационно-связным терминалом мобильного абонента и ретрансляторами путем измерения временных задержек распространения радиосигнала и последующего вычисления расстояний между ними, согласно изобретению, при отсутствии возможности у ретранслятора определять свои навигационные координаты, функции ретранслятора присваивают тому навигационно-связному терминалу мобильного абонента, который определяет свои навигационные координаты непосредственно по глобальной системе спутниковой навигации ГЛОНАСС (GPS) или по местным ориентирам путем ручного ввода координат, а в устройстве интегрированной адаптивной навигации, содержащем навигационно-связные терминалы, ретрансляторы и шлюз, вход-выход которого через коммутатор подключен к входу-выходу сервера, причем третий вход-выход коммутатора соединен с выходом-входом блока локального пользователя, согласно изобретению, каждый навигационно-связной терминал и ретранслятор содержат модуль управления, модуль ручного ввода координат, навигационный модуль, антенный вход которого соединен с антенной глобальной навигационной спутниковой системы, и последовательно соединенные переговорно-вызывной модуль, управляющий вычислитель и трансивер, антенный вход которого соединен с подключенной к нему мобильной антенной, выход модуля ручного ввода координат, входы-выходы модуля управления и навигационного модуля подключены, соответственно, к управляющему входу, управляющему и навигационному выходам-входам управляющего вычислителя, информационный вход-выход которого является входом-выходом шлюза.
Сравнение заявленного технического решения с аналогами и прототипом позволило установить соответствие условиям патентоспособности «новизна» и «изобретательский уровень», так как такое техническое решение не известно, и явным образом не следует из уровня техники.
Предложенные способ и устройство являются промышленно применимыми, поскольку могут быть реализованы существующими техническими средствами. Следовательно, предложенное техническое решение соответствует установленным критериям патентоспособности изобретения.
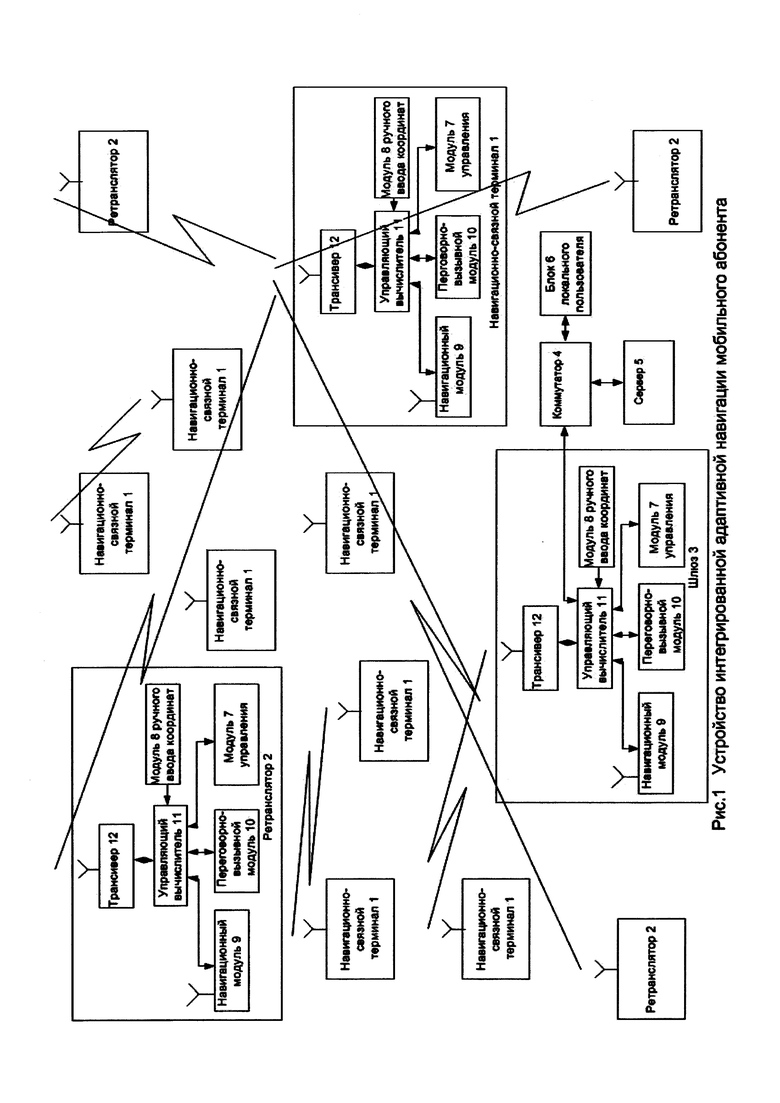
На рис. 1 представлено предложенное устройство интегрированной адаптивной навигации мобильных абонентов.
Устройство интегрированной адаптивной навигации содержит навигационно-связные терминалы 1, ретрансляторы 2 и шлюз 3, вход-выход которого через коммутатор 4 подключен к входу-выходу сервера 5, причем третий вход-выход коммутатора 4 соединен с выходом-входом блока локального пользователя 6, каждый навигационно-связной терминал 1 и ретранслятор 2 содержат модуль 7 управления, модуль 8 ручного ввода координат, навигационный модуль 9, антенный вход которого соединен с антенной глобальной навигационной спутниковой системы, и последовательно соединенные переговорно-вызывной модуль 10, управляющий вычислитель 11 и трансивер 12, антенный вход которого соединен с подключенной к нему мобильной антенной, выход модуля 8 ручного ввода координат, входы-выходы модуля 7 управления и навигационного модуля 9 подключены, соответственно, к управляющему входу, управляющему и навигационному выходам-входам управляющего вычислителя 11, информационный вход-выход которого является входом-выходом шлюза 3.
Устройство интегрированной адаптивной навигации мобильных абонентов работает следующим образом.
Имеется несколько навигационно-связных терминалов 1, которые обеспечивают беспроводную радиосвязь «каждый с каждым». При этом обеспечивается навигационная функция, так как каждый навигационно-связной терминал 1 может определить свои координаты по глобальной системе спутниковой навигации ГЛОНАСС (GPS). При «хорошей видимости» спутников навигационно-связной терминал 1 определяет свое местоположение по глобальной системе спутниковой навигации ГЛОНАСС (GPS), а при «плохой видимости» спутников (в лесу, в горах и т.д.) и отсутствии возможности определения местоположения по глобальной системе спутниковой навигации ГЛОНАСС (GPS) навигационно-связной терминал 1 переключается в режим локальной навигации. Каждый из абонентов сети, осуществляя связь с другими абонентами, является источником информации для осуществления навигации. Так как в сети есть фиксированные абоненты с известными позициями, то все остальные абоненты определяют свои координаты относительно фиксированных абонентов. При наличии связи с более чем тремя фиксированными абонентами вычисляются расстояния до этих абонентов и определяются координаты и время с помощью решения системы уравнений по аналогии с радионавигацией.
Устройство интегрированной адаптивной навигации мобильных абонентов содержит навигационно-связные терминалы 1 и более трех ретрансляторов 2 (на рис. 1 показаны четыре ретранслятора) с известными позициями. Зона радиопокрытия формируется с помощью ретрансляторов 2 и шлюза 3. Шлюз 3 предназначен для передачи данных между беспроводной сетью, в которой взаимодействуют ретрансляторы 2 и шлюз 3, и проводной сетью. Шлюз 3 через коммутатор 4 взаимодействует с сервером 5, обеспечивающим работу системы, в том числе возможность конфигурации, управления, мониторинга, и функциональность SIP телефонии. К коммутатору 4 подключен блок 6 локального пользователя, который может обмениваться данными с навигационно-связными терминалами 1. Навигационно-связные терминалы 1, ретрансляторы 2 и шлюз 3 имеют одинаковый состав входящих модулей. Модуль 7 управления обеспечивает функционирование устройства в разных режимах, а именно, в режиме навигационно-связного терминала, ретранслятора или шлюза. Модуль 8 ручного ввода координат обеспечивает ввод координат по местным ориентирам в режиме ретранслятора при «плохой видимости» спутников. Навигационный модуль 9 обеспечивает определение координат позиционирования с помощью системы глобальной спутниковой навигации ГЛОНАСС/GPS. Переговорно-вызывной модуль 10 обеспечивает вызов и ведение переговоров абонентов. Управляющий вычислитель 11 обеспечивает взаимодействие всех модулей, передачу данных в проводную сеть и формирует сигнал для трансивера 12.
Так как навигационно-связные терминалы 1 и ретрансляторы 2 имеют одинаковый состав входящих модулей, то каждое перечисленное устройство может быть как навигационно-связным терминалом, так и ретранслятором. В условиях «плохой видимости» спутников функции ретрансляторов 2 с известными позициями могут меняться. Сначала какие-то четыре ретранслятора 2 с известными позициями являлись источником «локального навигационного поля» для навигационно-связных терминалов 1. Затем если у одного из ретрансляторов 2 связь со спутниками значительно ухудшились, то устройство выберет другого ретранслятора 2 из числа навигационно-связных терминалов 1 мобильных абонентов и он станет источником «локального навигационного поля».
Таким образом, если какие-то навигационно-связные терминалы 1 мобильных абонентов смогли привязаться к координатам по спутникам или по местным ориентирам, то они могут стать источниками навигационной информации для других мобильных абонентов. Необходимо чтобы в устройстве были соответствующие критерии выбора наилучшей комбинации референсных абонентов для создания локального навигационного поля для остальных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС | 2017 |
|
RU2649628C1 |
| НАВИГАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2007 |
|
RU2365061C2 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| Гибридная наземно-космическая система связи | 2016 |
|
RU2660559C2 |
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА МОБИЛЬНОЙ СВЯЗИ | 2010 |
|
RU2468516C2 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
Изобретение относится к радиотехнике и может использоваться для обеспечения коммуникации мобильных абонентов и определения их местоположения. Технический результат состоит в том, что изобретение позволяет при плохой видимости спутников назначать ретрансляторы из навигационно-связных терминалов мобильных абонентов, которые могут стать источником локального навигационного поля. Для этого при отсутствии возможности у ретранслятора определять свои навигационные координаты, функции ретранслятора присваивают тому навигационно-связному терминалу мобильного абонента, который определяет свои навигационные координаты непосредственно по глобальной системе спутниковой навигации ГЛОНАСС (GPS) или по местным ориентирам путем ручного ввода координат. В устройстве каждый навигационно-связной терминал и ретранслятор содержат модуль управления, модуль ручного ввода координат, навигационный модуль, антенный вход которого соединен с антенной глобальной навигационной спутниковой системы, и последовательно соединенные переговорно-вызывной модуль, управляющий вычислитель и трансивер, антенный вход которого соединен с подключенной к нему мобильной антенной, выход модуля ручного ввода координат, входы-выходы модуля управления и навигационного модуля подключены, соответственно, к управляющему входу, управляющему и навигационному выходам-входам управляющего вычислителя, информационный вход-выход которого является входом-выходом шлюза. 2 н.п. ф-лы, 1ил.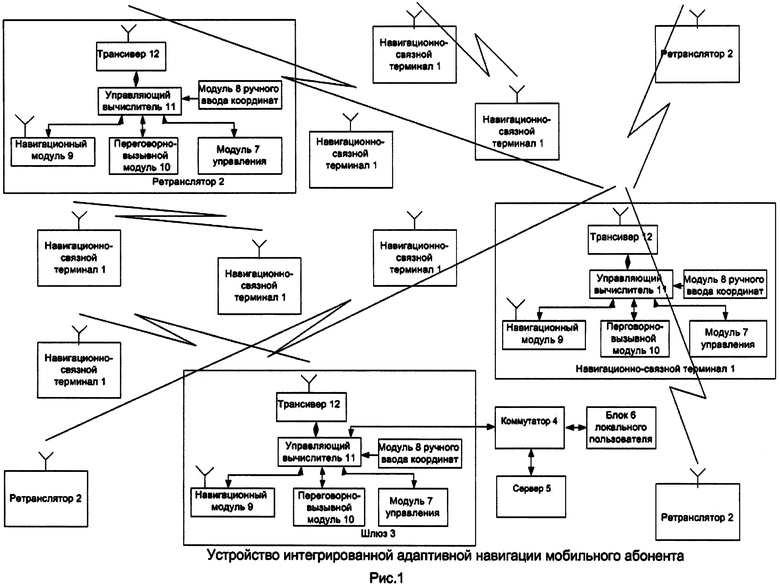
1. Способ интегрированной адаптивной навигации мобильных абонентов, заключающийся в том, что организуют мобильную радиосвязь между мобильными абонентами «каждый с каждым», причем каждый навигационно-связной терминал мобильного абонента определяет свои навигационные координаты по системе глобальной спутниковой навигации ГЛОНАСС (GPS) или посредством определения расстояния между навигационно-связным терминалом мобильного абонента не менее чем с тремя ретрансляторами, каждый из которых определяет свои навигационные координаты по системе глобальной спутниковой навигации ГЛОНАСС (GPS) или по местным ориентирам путем ручного ввода координат, при этом определяют расстояния между навигационно-связным терминалом мобильного абонента и ретрансляторами путем измерения временных задержек распространения радиосигнала и последующего вычисления расстояний между ними, отличающийся тем, что при отсутствии возможности у ретранслятора определять свои навигационные координаты, функции ретранслятора присваивают тому навигационно-связному терминалу мобильного абонента, который определяет свои навигационные координаты непосредственно по глобальной системе спутниковой навигации ГЛОНАСС (GPS) или по местным ориентирам путем ручного ввода координат.
2. Устройство интегрированной адаптивной навигации мобильных абонентов, содержащее навигационно-связные терминалы, ретрансляторы и шлюз, вход-выход которого через коммутатор подключен к входу-выходу сервера, причем третий вход-выход коммутатора соединен с выходом-входом блока локального пользователя, отличающееся тем, что каждый навигационно-связной терминал и ретранслятор содержат модуль управления, модуль ручного ввода координат, навигационный модуль, антенный вход которого соединен с антенной глобальной навигационной спутниковой системы, и последовательно соединенные переговорно-вызывной модуль, управляющий вычислитель и трансивер, антенный вход которого соединен с подключенной к нему мобильной антенной, выход модуля ручного ввода координат, входы-выходы модуля управления и навигационного модуля подключены, соответственно, к управляющему входу, управляющему и навигационному выходам-входам управляющего вычислителя, информационный вход-выход которого является входом-выходом шлюза.
| СИСТЕМА СВЯЗИ С РЕТРАНСЛЯТОРАМИ, ИЗМЕНЯЮЩИМИ СВОЕ МЕСТОПОЛОЖЕНИЕ В ПРОСТРАНСТВЕ | 2007 |
|
RU2352067C1 |
| 0 |
|
SU125005A1 | |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |

