Область техники
Изобретение относится к навигационной технике и может быть использовано для определения местоположения персонала и мобильных роботов, перемещающихся внутри зданий и сооружений с экранирующими стенами.
Уровень техники
Перемещение людей в протяженных зданиях и сооружениях на территории промышленных объектов сопровождается потерями времени для определения оптимального маршрута, а в условиях вредных и опасных производств еще и требует дополнительных мер безопасности.
Для расширения применения роботов в промышленности необходимо обеспечить их навигацию внутри сооружений, конструкция которых экранирует сигнал глобальных навигационных спутниковых систем (ГНСС): складах, ангарах, шахтах и т.д.
В условиях отсутствия сигналов ГНСС используются локальные системы навигации (ЛСН), позволяющие определять координаты потребителя в зоне покрытия радионавигационных опорных станций. Но в силу физических ограничений сигнал от ЛСН также может быть доступен только при нахождении абонента на открытой местности.
Инерциальные датчики позволяют определять местоположение и параметры движения в полностью автономном режиме, но со временем накапливают ошибку. При этом малогабаритные инерциальные датчики на базе МЭМС-гироскопов, которые могут быть встроены в портативные носимые устройства, без внешней коррекции (от ГНСС, одометров и т.д.) имеют очень быстро возрастающую погрешность определения координат.
Для навигации внутри помещений могут использоваться системы, использующие радиочастотные, оптические и ультразвуковые сигналы.
Навигация в оптическом диапазоне потенциально обеспечивает высокую точность определения местоположения, но в то же время обладает рядом недостатков:
1. Работоспособность оптических датчиков зависит от внешней светотехнической обстановки.
2. Недопустимо закрытие или загрязнение оптических поверхностей датчиков.
3. Ограниченное поле зрения оптических датчиков.
Использование ультразвуковых датчиков ограничено отражением звуковых волн от стен помещения и находящихся в нем предметов, а также существующей зависимостью скорости звука от состояния воздушной среды (температуры, ветра). Кроме того, датчики этого типа обеспечивают малую дальность измерений (до 15 м).
В настоящее время самое широкое распространение получили радиочастотные системы, в которых реализованы следующие методы определения местоположения.
1. RSSI (Received Signal Strength Indicator) - определение расстояния до радиопередатчика по мощности (уровню) сигнала.
Дальность определяется в соответствии с выражением

где Рпр - мощность сигнала на дальности D; Р0 - мощность сигнала на калибровочной дальности D0; η - коэффициент ослабления сигнала в среде распространения.
2. ToF (Time of Flight) - измерение времени прохождения сигнала от радиопередатчика до объекта и обратно

где t - задержка сигнала; с - скорость света в вакууме.
3. TDoA (Time Difference of Arrival) - измерение разницы времени прихода сигнала от объекта до нескольких синхронизированных между собой опорных маяков

где Δt - задержка сигнала от нескольких маяков; x1,2, у1,2 - известные координаты маяков; х, у - координаты приемника.
4. АоА (Angle of Arrival) - определение положения объекта по углу прибытия сигнала.
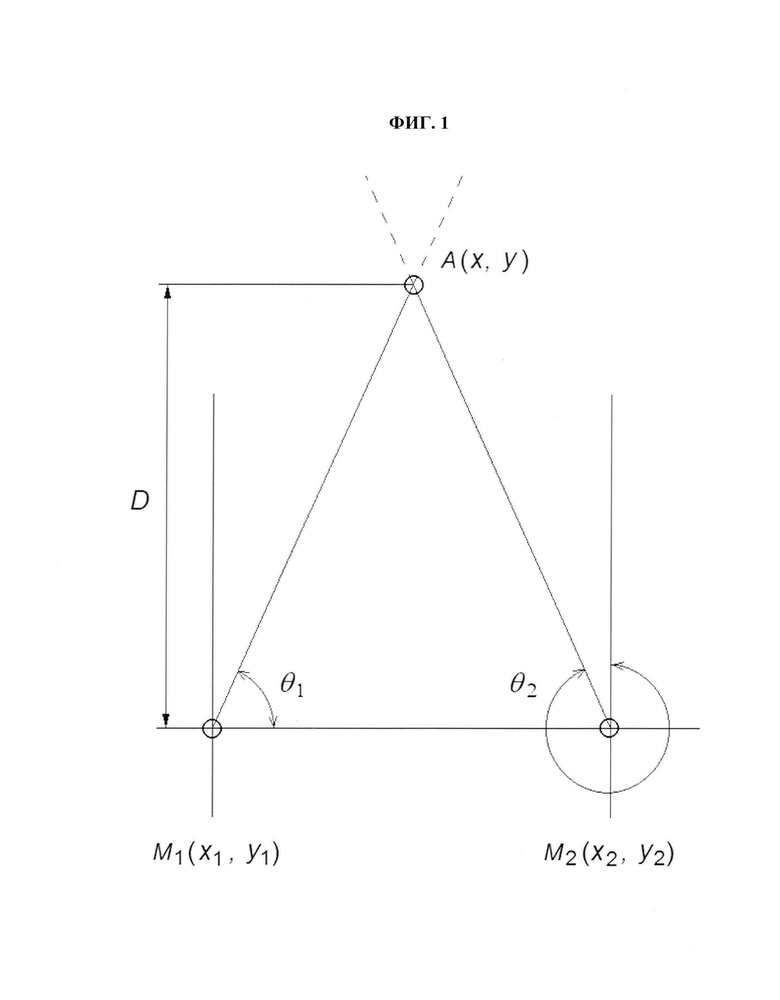
Если первый маяк находится в начале системы относительных координат (0, 0), а второй маяк разнесен с ним на известное расстояние, то относительные координаты приемника в точке А (см. фиг. 1) определяются следующим образом

где x2, y2 - координаты второго маяка; θ1, θ2 - углы прибытия сигнала от первого и второго маяков.
Для навигации в помещениях используются коммерческие решения с использованием широковещательных сигналов на базе технологий Wi-Fi и Bluetooth.
Wi-Fi представляет собой технологию беспроводной локальной сети с устройствами на основе стандартов IEEE802.11, с основными рабочими диапазонами 2412…2472 МГц, 5160…5825 МГц и 5955…7115 МГц. Для позиционирования используется метод АоА.
Bluetooth является производственной спецификацией беспроводных персональных сетей, обеспечивающей информационный обмен между носимыми устройствами на частотах 2402…2480 МГц.
Для отслеживания перемещения объектов в закрытых помещениях на данный момент широко применяется Bluetooth Low Energy (BLE) - энергосберегающий вариант технологии персональной сети Bluetooth (PAN), предназначенный для использования устройствами с подключением к телекоммуникационным сетям, и в устройствах, используемых для создания сетей интернета вещей (IoT).
В технологии BLE используется скачкообразная перестройка частоты в нелицензируемом диапазоне частот 2,4 ГГц для связи находящихся на расстоянии 10…20 м (в ряде случаев до 100 м) устройств с максимальной скоростью 1 Мбит/с при потребляемой мощности 0,01…0,50 Вт. Устройства с поддержкой BLE могут отключаться или переводиться в спящий режим между подключениями длительностью не более нескольких секунд, что позволяет снизить потребление энергии.
Для определения координат объектов в технологии BLE используются методы RSSI и ToF, что позволяет достигнуть предельной погрешности измерений до 0,1 м.
На базе технологии BLE корпорацией Apple, Inc (США) было разработано радионавигационное устройство iBeacon. iBeacon позволяет передачу данных между беспроводными устройствами - маяками и устройствами, поддерживающими технологию BLE.
Также известен способ построения карты и навигации внутри и снаружи помещений с помощью Bluetooth-маяков (US 9204257 B1, Indoor and Outdoor Mapping and Navigation utilizing RF Bluetooth Beacons). В зоне навигации разворачивается сеть Bluetooth-маяков, излучающих сигналы, содержащие идентификаторы каждого маяка и данные о его положении. Навигация осуществляется с помощью портативного носимого устройства, принимающего и декодирующего сигналы Bluetooth-маяков.
Известен способ и система навигации в помещениях с помощью устройства iBeacon (CN 105636199 A, iBeacon Indoor positioning System and Method). Система включает в себя сеть устройств iBeacon в помещении, портативное носимое устройство абонента и сервер управления. С портативного носимого устройства отправляется запрос, принимаемый устройствами iBeacon, запрашивающих, в свою очередь, сервер управления, выполняющий идентификацию портативного носимого устройства и устройств iBeacon, после чего сервер отправляет данные о координатах устройств iBeacon и расстоянии от них до портативного носимого устройства.
Также известен способ и устройство для навигации внутри помещений на базе устройства iBeacon (CN 104284419 В, A kind of Indoor positioning and auxiliary Navigation Method, Device and System based on iBeacon), заключающийся в том, что используется несколько устройств iBeacon, излучающих широкополосный сигнал, содержащий информацию о координатах и типе устройства. Местоположение абонента определяется методом RSSI.
Недостаток прототипа заключается в необходимости связи с сервером, невозможности оперативной коррекции карты помещения и расположения в нем маяков, невозможности контроля доступа в обслуживаемое помещение, фиксированной рабочей частоте, отсутствии непрерывной навигации абонента при его переходе из открытого пространства внутрь экранирующего сооружения. Кроме того, не отслеживается обстановка в обслуживаемом помещении, где может измениться состав газовой среды, температура, радиационная обстановка, в связи с чем доступ туда для персонала должен быть ограничен. Также значительно снижается возможность навигации при отсутствии освещения по маршруту, на котором могут находиться различные препятствия.
Наиболее близких по технической сущности (прототипов) к заявляемому изобретению в ходе патентного и информационного поиска не выявлено.
Технической проблемой, на решение которой направлено заявляемое изобретение является совершенствование способа определения координат абонента в помещении.
Раскрытие сущности изобретения
Техническим результатом заявляемого изобретения является возможность определения местоположения персонала и мобильных роботов, перемещающихся внутри зданий и сооружений.
Для достижения заявленного технического результата предложен способ навигации в помещении с использованием радионавигационного датчика, содержащего процессорный модуль, усилительный блок, модуль связи с аппаратно-программным комплексом локальной системы навигации, антенно-фидерное устройство и блоки питания радионавигационного датчика, и являющегося частью локальной радионавигационной системы (ЛРС), осуществляющей навигационную поддержку потребителей глобальных навигационных спутниковых систем (ГНСС), работающих в условиях плохой радиовидимости навигационных спутников и отсутствия их сигналов внутри зданий и сооружений с экранирующими стенами, заключающийся в том, что производят построение карты помещения, для чего, внутри помещения устанавливают радионавигационные датчики, осуществляют привязку к ним координат с помощью портативного носимого устройства с установленным на нем программным обеспечением, встроенной телекамерой и гироскопами, портативное носимое устройство в каждом углу помещения поочередно прикладывают к каждой из смежных стен, а на противоположную стену помещают геометрический репер, либо портативное носимое устройство размещают в точке, из которой обеспечивается видимость всех геометрических реперов, обнаружение которых осуществляют путем распознавания образов, а дальность определяют угломерным методом, с другой выбранной точки с известными координатами, аналогичным образом определяют координаты радионавигационных датчиков и объектов внутри помещения, являющихся препятствиями для передвижения, передают координаты радионавигационных датчиков и карту помещения через модуль связи с аппаратно-программным комплексом локальной системы навигации в аппаратно-программный комплекс локальной системы навигации, имеющий вычислитель на базе нейронного процессора, определяют местоположение персонала и мобильных роботов, перемещающихся внутри зданий и сооружений за счет нейронной сети, реализующейся в аппаратно-программном комплексе локальной системы навигации, при этом, может обеспечиваться переход от географических координат к координатам внутри зданий и сооружений, а также режим непрерывной навигации, когда координаты радионавигационных датчиков в протяженных зданиях и сооружениях напрямую привязаны к фактическим географическим координатам.
Для достижения технического результата предложен радионавигационный датчик, содержащий процессорный модуль, который включает управляющий микроконтроллер, два приемопередатчика локальной системы навигации в диапазоне частот от 400 до 470 МГц, приемопередатчик связного канала с частотой 850 МГц и блок формирования тактового сигнала выполненный на базе кварцевого генератора, при этом, усилительный блок включает блок управления двумя усилительными модулями содержащие малошумящий усилитель и усилитель мощности, при этом, модуль связи с аппаратно-программным комплексом локальной системы навигации включает модем 2G/3G, идентификационный электронный модуль абонента, контроллер Ethernet и модуль Bluetooth/Wi-Fi, при этом, антенно-фидерное устройство включает направленную однодиапазонную панельную антенну частоты 450 МГц, штыревую мультидиапазонную антенну частоты 868 МГц, широкополосную всенаправленную антенну 3G/Wi-Fi и встроенную на печатной плате антенну Bluetooth/Wi-Fi, при этом питание радионавигационного датчика осуществляется блоком формирования цифрового питания и блоком формирования аналогового питания.
Краткое описание чертежей
На фиг. 1 показана схема определения положения объекта по углу прибытия сигнала.
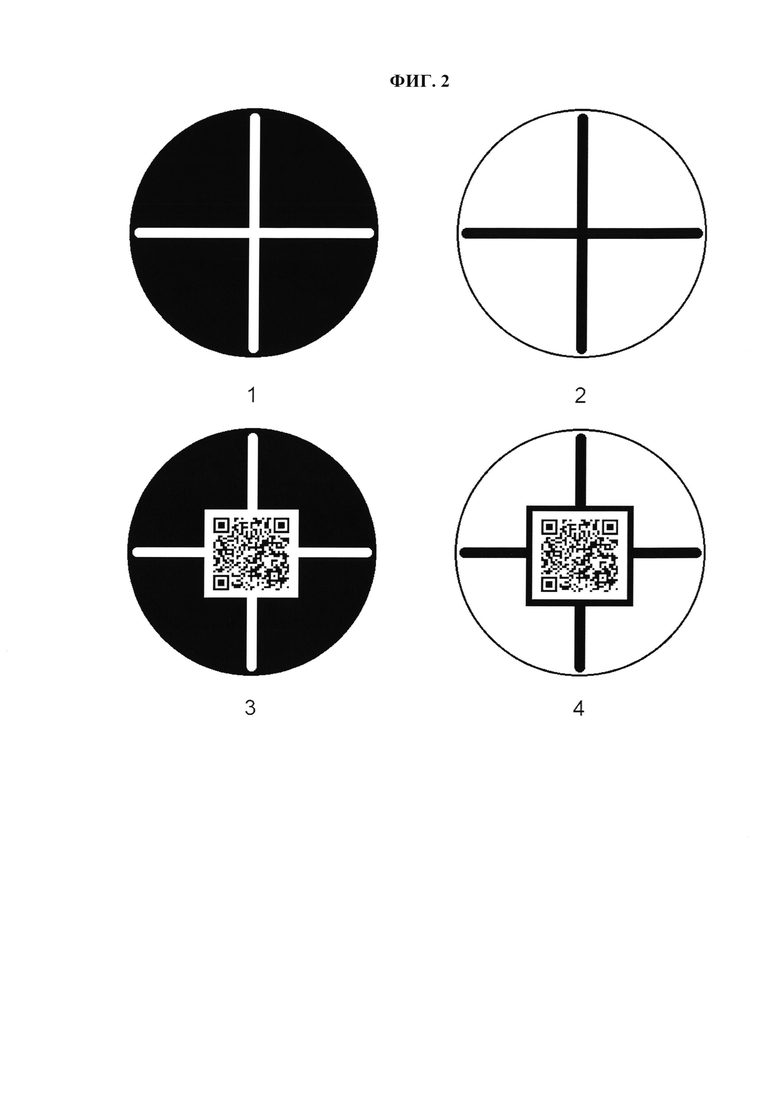
На фиг. 2 показаны примеры геометрических реперов 1, 2, 3, 4 с известными формой и размерами.
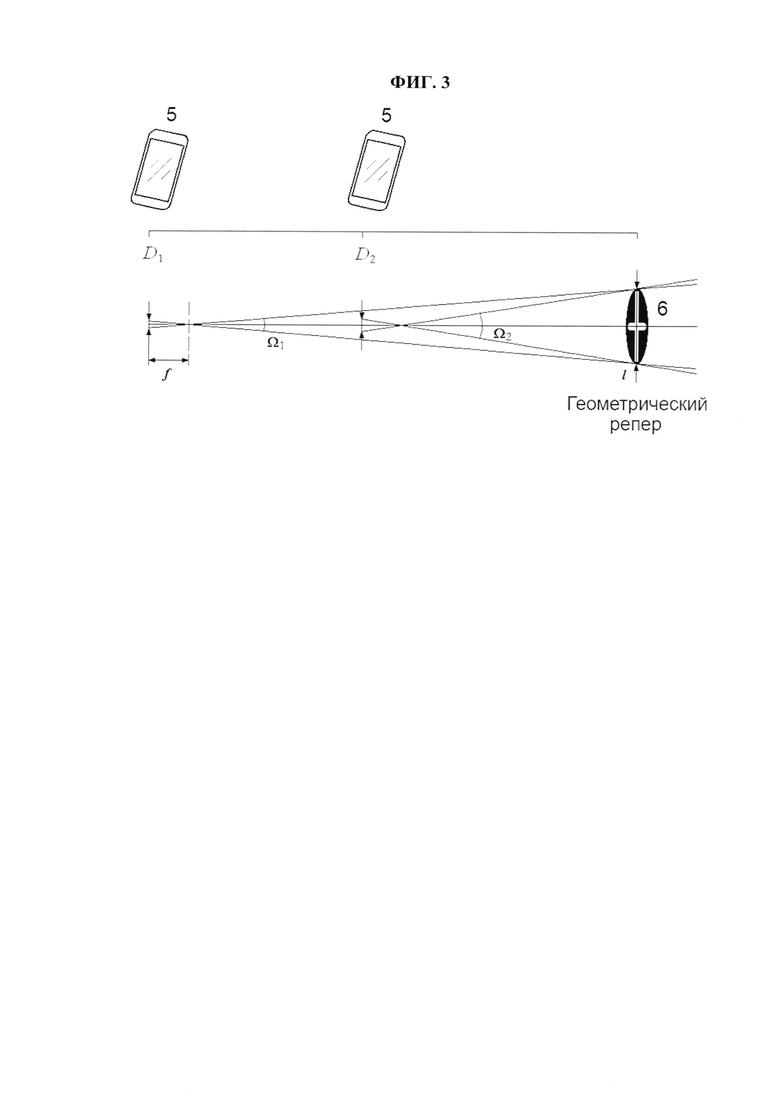
На фиг. 3 показана схема измерения дальности до геометрического репера, выполненная угломерным методом, основанном на определении углового размера объекта или его части, где:
5 - портативные носимые устройства;
D1 и D2 - дальности.
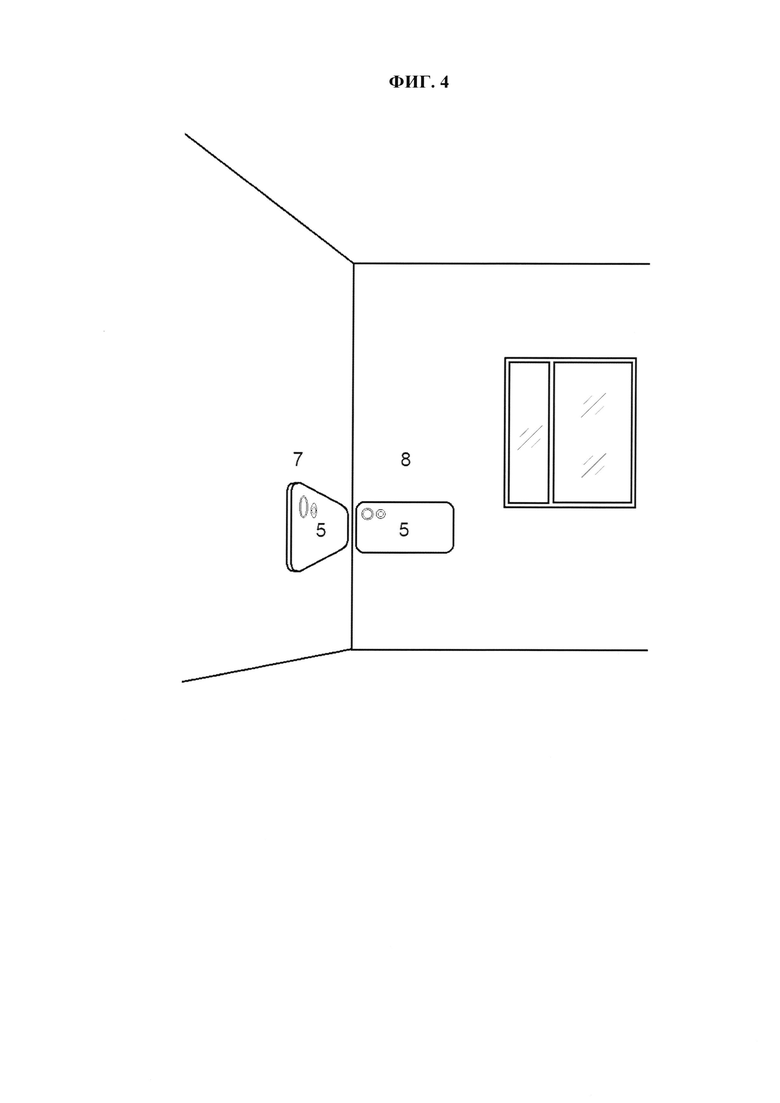
На фиг. 4 показан порядок построения плана прямоугольного помещения.
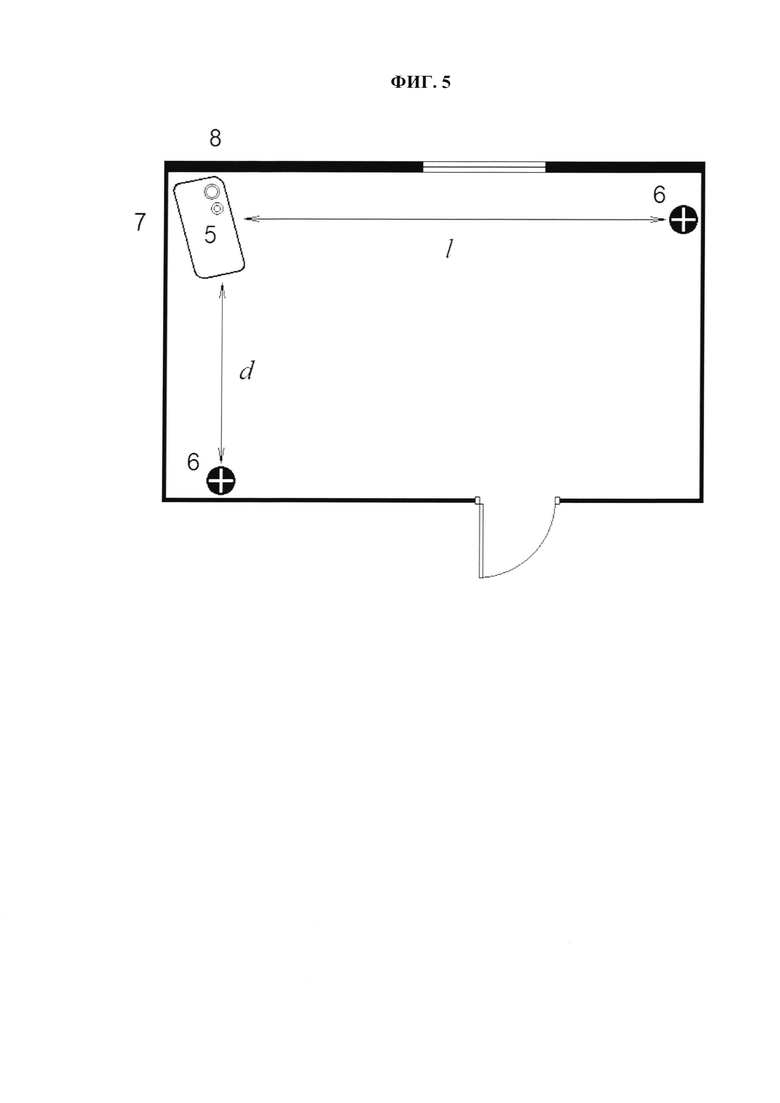
На фиг. 5 и 6 показана схема показана схема построения плана прямоугольного помещения, где: 6, 7 - смежные стены; 8 - мешающие объекты в помещении.
На фиг. 7 показан порядок построения плана, если помещение имеет сложную форму.
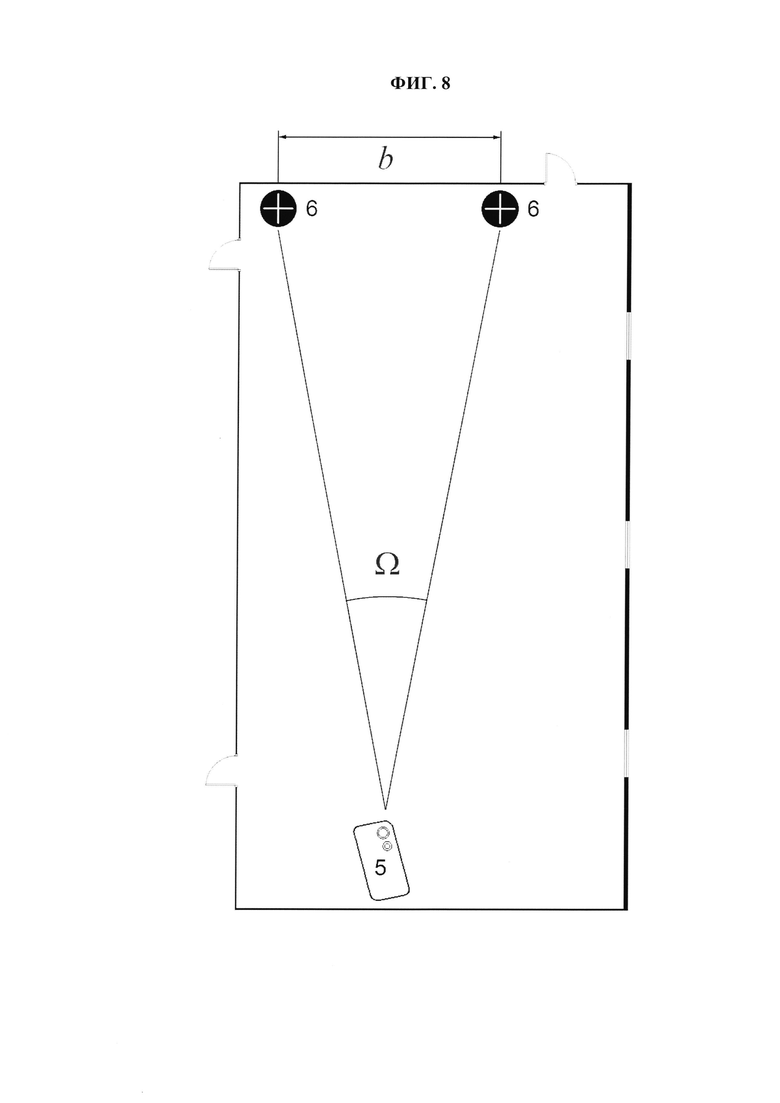
На фиг. 8 показана схема измерения дальности в помещениях больших размеров.
На фиг. 9 показан внешний вид радионавигационного датчика 9.
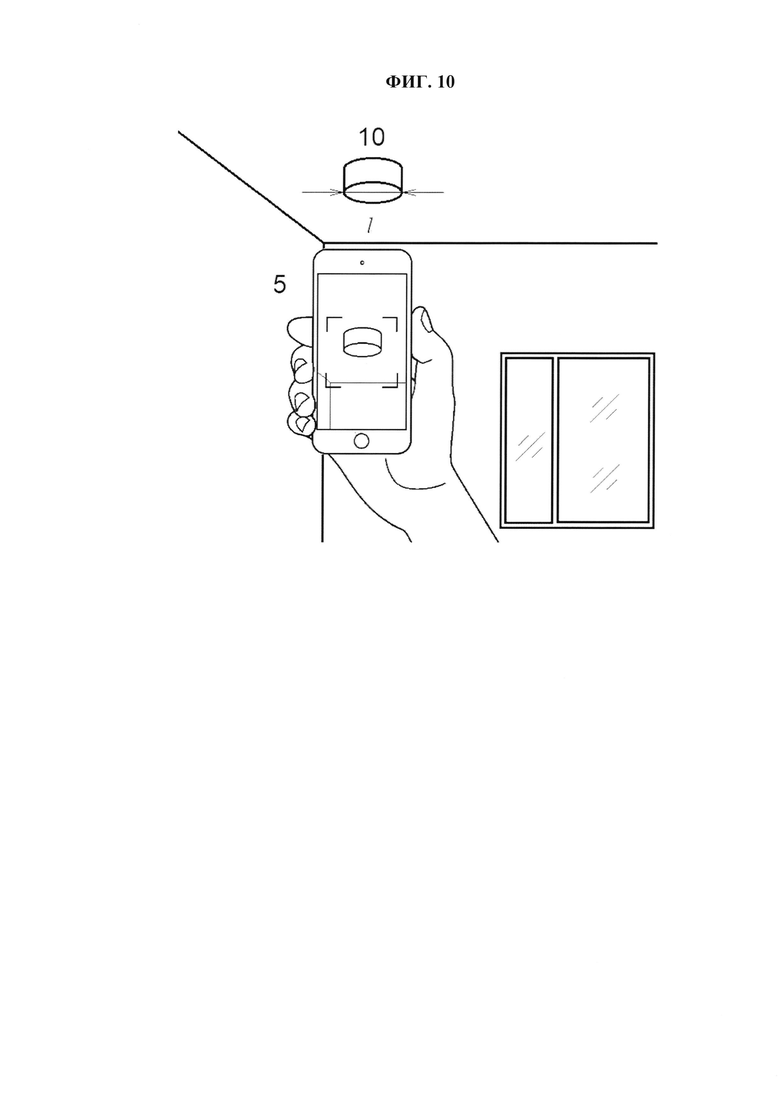
На фиг. 10 показан процесс измерения дальности радионавигационного датчика с помощью портативного носимого устройства оператором по изображению на экране.
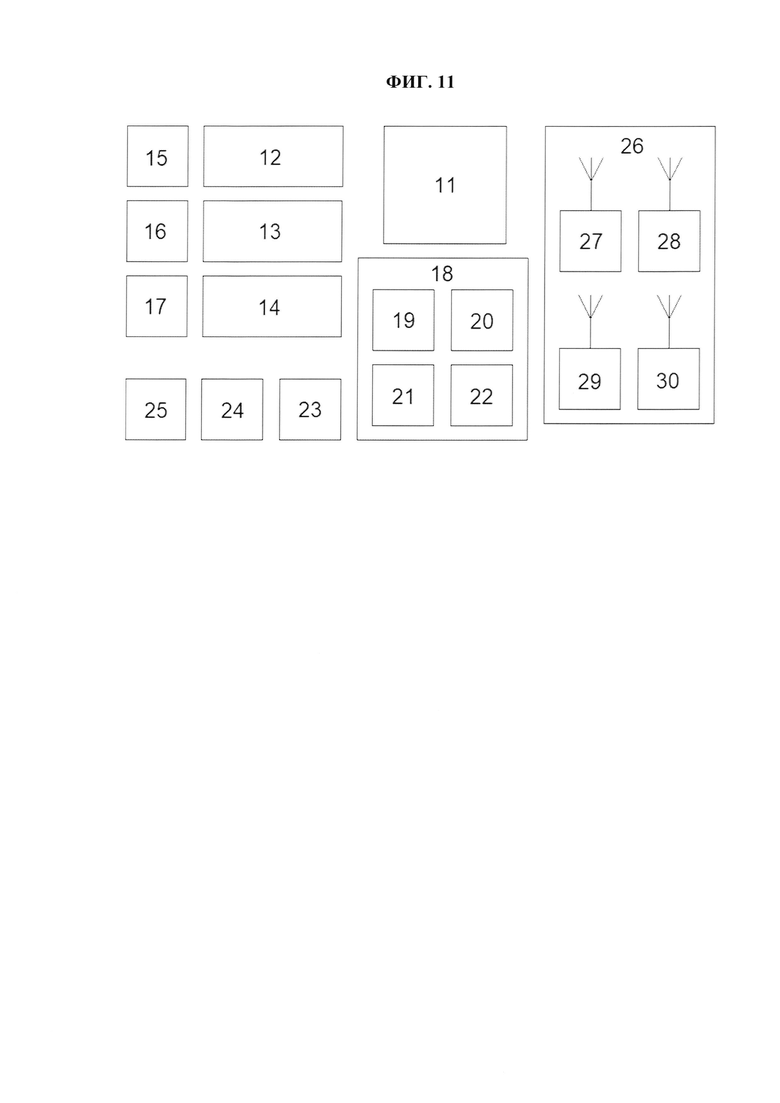
На фиг. 11 показана структурная схема радионавигационного датчика 9, где:
10 - управляющий микроконтроллер;
11, 12 - приемопередатчики локальной системы навигации в диапазоне частот от 400 до 470 МГц;
13 - приемопередатчик связного канала на частоте 850 МГц;
14, 15 - усилительные модули;
16 - блок управления усилительными модулями;
17 - модуль связи с аппаратно-программным комплексом локальной системы навигации;
18 - модем 2G/3G;
19 - идентификационный электронный модуль абонента;
20 - контроллер Ethernet;
21 - модуль Bluetooth/Wi-Fi;
22 - блок формирования тактового сигнала на базе кварцевого генератора;
23 - блок формирования цифрового питания;
24 - блок формирования аналогового питания;
25 - антенно-фидерное устройство;
26 - однодиапазонная панельная антенна частоты 450 МГц;
27 - штыревая мультидиапазонная антенна частоты 868 МГц;
28 - широкополосная всенаправленная антенна 3G/Wi-Fi;
29 - встроенная антенна Bluetooth/Wi-Fi на печатной плате.
Осуществление изобретения
Решением поставленной задачи является способ навигации в помещении, при котором построение карты помещений и привязка к ним координат радионавигационных датчиков осуществляются с помощью портативного носимого устройства с установленным специальным программным обеспечением, встроенной телекамерой и гироскопами, а также специальных геометрических реперов с известными размерами.
Для построения плана помещения портативное носимое устройство 5 в каждом углу помещения поочередно прикладывают к каждой из смежных стен прямоугольного помещения, а на противоположную стену помещают геометрический репер 1-4. Либо портативное носимое устройство 5 размещается в точке, из которой обеспечивается видимость всех геометрических реперов 1-4, обнаружение которых осуществляется методами распознавания образов, а дальность определяется угломерным методом. После чего относительно данной или другой выбранной точки с известными координатами аналогичным образом определяются координаты радионавигационных датчиков 9 и объектов внутри помещения, являющихся препятствиями для передвижения, которые вместе с картой помещения передаются в аппаратно-программный комплекс локальной системы навигации, имеющий вычислитель на базе нейронного процессора и операционную систему, реализующих нейронную сеть. Нейронная сеть прокладывает оптимальные маршруты для перемещения персонала, транспортных средств или мобильных роботов, определяет путем анализа траекторию передвижения сотрудников, признаки возможных несанкционированных действий, ухудшения самочувствия работников, наступления паники среди сотрудников, поломки транспортных средств или мобильных роботов, вычисляет пути эвакуации сотрудников при чрезвычайных ситуациях с учетом взаимного расположения опасных факторов и сотрудников, а также перемещения основной массы персонала, транспортных средств или мобильных роботов в данный момент времен. В то же время определение местоположения абонентов обеспечивается независимо от наличия связи у абонентских терминалов, портативных носимых устройств 5, радионавигационных датчиков 9 с сервером, а для абонентов глобальных навигационных систем и локальных навигационных систем может обеспечиваться переход от географических координат к координатам внутри зданий и сооружений, а также режим непрерывной навигации, когда координаты радионавигационных датчиков 9 в протяженных зданиях и сооружениях напрямую привязаны к фактическим географическим координатам.
Для приема сигналов от радионавигационных датчиков 9 внутри помещений и сооружений могут быть использованы абонентский терминал базовый локальной системы навигации, абонентский терминал высокоточный локальной системы навигации, а также портативное носимое устройство 5 типа смартфона или планшета под управлением операционной системы (ОС) Android, или иных ОС, обеспечивающих возможность работы программного обеспечения.
Для навигации карта помещения с расположением в нем радионавигационных датчиков 9 может заранее загружаться с сервера в абонентский терминал или в портативное носимое устройство 5. Возможно предварительное построение карты помещения с привязкой к ней радионавигационных датчиков 9, либо выполняться уточнение уже имеющейся карты с расположением радионавигационных датчиков 9, посредством портативного носимого устройства 5 с установленным специальным программным обеспечением. При это портативное носимое устройство 5 должно иметь по меньшей мере встроенную телекамеру и гироскопы. Дополнительно, портативное носимое устройство 5 может иметь необходимые датчики и устройства, позволяющие осуществлять необходимые замеры и получить необходимые данные для решения поставленных задач.
Такое решение задач в настоящем изобретении позволяет периодически отслеживать актуальность карты помещений и расположения в них радионавигационных датчиков 9. Это может быть необходимо в некоторых типах промышленных сооружений, конструкция которых может деформироваться при воздействии внешних факторов, что приведет к изменению линейных размеров и сдвигу относительных координат радионавигационных датчиков.
Местоположение абонентов определяется независимо от наличия связи с аппаратно-программным комплексом локальной системы навигации у абонентских терминалов, портативных носимых устройств 5 и радионавигационных датчиков 9.
Аппаратно-программный комплекс локальной системы навигации включает сервер, который имеет вычислитель на базе нейронного процессора и операционную систему, позволяющие реализовать нейронную сеть, которая решает следующие задачи:
- построение оптимальных маршрутов перемещения персонала, транспортных средств, мобильных роботов или иных подвижных объектов;
- анализ траектории передвижения сотрудников в целях предотвращения ситуаций, опасных для жизни и здоровья;
- анализ траекторий передвижения сотрудников для выявления их несанкционированных действий;
- выбор пути эвакуации при чрезвычайных ситуациях с учетом взаимного расположения опасных факторов и сотрудников, а также перемещения большей части персонала (основного потока) в данный момент времени;
- построение траекторий, помогающих при эвакуации, снижающих вероятность наступления паники среди персонала.
Для потребителей ГНСС и ЛСН обеспечиваются следующие режимы навигации:
- непрерывная навигация с переходом от географических координат к координатам внутри зданий и сооружений;
- непрерывная навигация, когда координаты радионавигационных датчиков в протяженных зданиях и сооружениях напрямую привязаны к фактическим географическим координатам.
Для построения или уточнения карты помещения и координатной привязки радионавигационных датчиков используются показанные на фиг. 2 геометрические реперы с известными формой и размерами 1-4. В конструкции каждого геометрического репера 1-4 должен быть геометрический инвариант в виде диска, диаметр которого остается постоянной величиной независимо от ракурса наблюдения. На геометрический репер 3, 4 также может наноситься QR-код, а для измерений в условиях недостаточной освещенности геометрический репер 4 может иметь светоизлучающие диоды.
Измерения дальности до геометрического репера 1-4 выполняются угломерным методом, основанном на определении углового размера объекта или его части, как показано на фиг. 3. Перемещение портативного носимого устройства 5 с дальности D1 на дальность D2 сопровождается изменением видимого углового размера геометрического репера 1-4, внешний вид которого может соответствовать представленным на фиг. 2 вариантам, или отличаться от них.
Для определения дальности необходимо знать линейные размеры геометрического репера 1-4. Наблюдаемый угловой размер геометрического репера 1-4 составляет

Максимальная дальность измерений угломерным методом можно оценить по выражению

где L - линейный размер геометрического репера 1-4; ω - минимальный разрешаемый угловой размер отрезка L в поле зрения (угловое разрешение телекамеры).
Погрешность измерений дальности угломерным методом связана с ошибкой измерения размеров объекта  и угловым разрешением телекамеры (Δω)
и угловым разрешением телекамеры (Δω)
где Θ - поле зрения объектива; n - количество элементов изображения (пикселей) в строке или в столбце матричного фотоприемника.
Для измерений может быть использовано портативное носимое устройство типа смартфона с специальным программным обеспечением, частично аналогичному по функционалу имеющимся в магазине приложений Google Р1ау продуктам Smart Measure (Smart Tools Co., Япония) и MagicPlan (Sensopia Inc., Канада).
Приложение для ОС Android Smart Measure предназначено для измерений дальности до объектов, а также их высоты и ширины, с использованием встроенных в смартфон или планшет телекамеры, гироскопов и магнетометра. Также вычисляется площадь объекта, могут выбираться единицы измерения. Для вычислений используются тригонометрические соотношения. К недостаткам относится большая погрешность измерений, которую можно частично компенсировать с помощью функции ручной калибровки.
Другое приложение, также для ОС Android, MagicPlan позволяет создавать и публиковать планы этажей здания в двухмерном и трехмерном виде, возможно работать с несколькими этажами в здании. Для построения плана используются встроенные в смартфон или планшет телекамера и гироскопы. Построенный план может быть заполнен мебелью и сантехникой, также добавляется расположение светильников и электрических розеток. Возможно сопряжение с лазерными дальномерами. Разработанный проект записывается в файл, который может быть отправлен на другие устройства.
В программном обеспечении для портативных носимых устройств 5 измерения дальности выполняются по геометрическим реперам 1-4 с заранее известными размерами, что позволяет исключить один из основных источников погрешности. Также не требуется наличие магнитометра, данные от которого не могут быть использованы в помещении или сооружении с экранирующими стенами. Перед выполнением измерений портативное носимое устройство 5 устанавливается на штатив с известной высотой, либо вводится значение высоты, на которой выполняется замер, или эта высота измеряется по геометрическому реперу 1-4, размещенному на полу помещения, а также с помощью других дополнительных датчиков.
Для построения плана прямоугольного помещения в соответствии с фиг. 4 и фиг. 5 портативное носимое устройство 5 в каждом углу поочередно прикладывают к каждой из смежных стен 6 и 7 прямоугольного помещения, а на противоположную стену помещают геометрический репер 1-4, таким образом измеряя длину  и ширину d помещения. Так как в этом случае оператор не может контролировать наведение телекамеры на геометрический репер 1-4 и выдать команду на измерение дальности до него, то обнаружение репера 1-4 осуществляется специальным программным обеспечением, использующим методы распознавания образов и автоматически измеряющего дальность.
и ширину d помещения. Так как в этом случае оператор не может контролировать наведение телекамеры на геометрический репер 1-4 и выдать команду на измерение дальности до него, то обнаружение репера 1-4 осуществляется специальным программным обеспечением, использующим методы распознавания образов и автоматически измеряющего дальность.
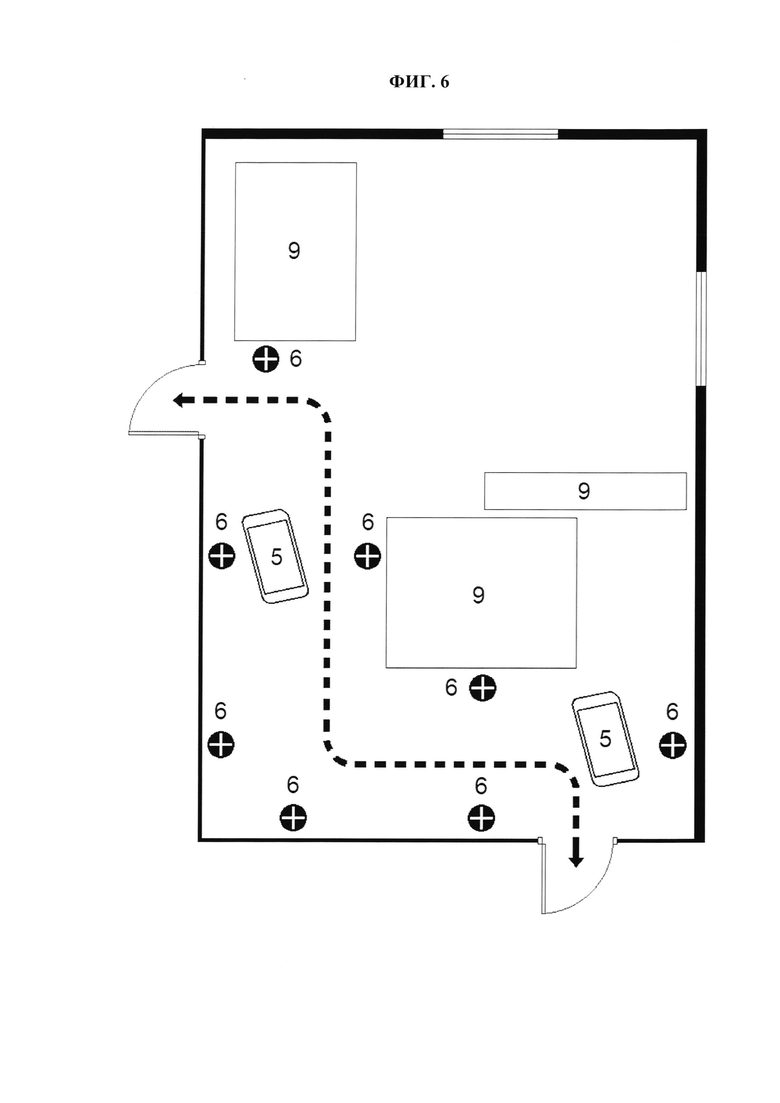
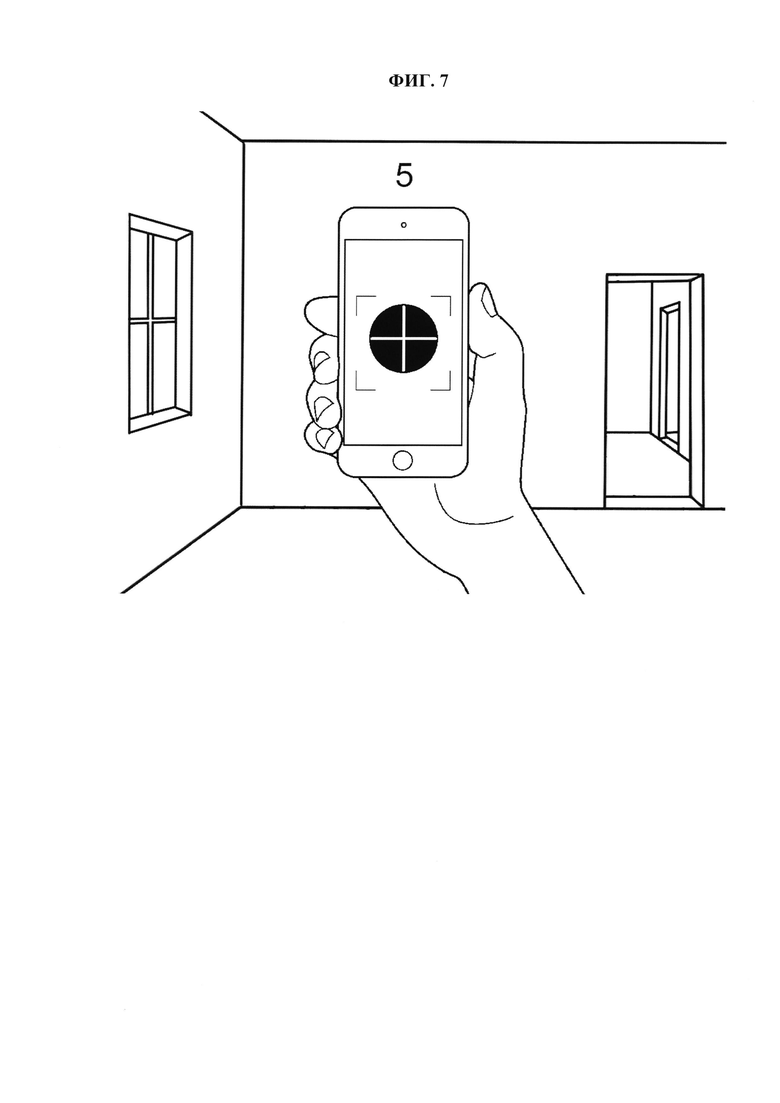
Если помещение имеет сложную форму, или, как показано на фиг. 6, в нем затруднен доступ к углам из-за мешающих предметов 8 и видимость геометрических реперов 6, то измерения с помощью портативного носимого устройства 5 выполняются из наиболее удобной точки оператором, который может наводить телекамеру на геометрический репер по изображению на экране (см. фиг. 7).
Так как технология BLE потенциально может обеспечить дальность измерений до 100 м, то в помещениях больших размеров дальность уже должна определяться по угловому размеру базы b между двумя геометрическими реперами (6 на фиг. 8).
Одно из основных требований к геометрическому реперу 1-4 - достаточный контраст с окружающим фоном, позволяющий четко определить его границу на изображении, формируемом телекамерой портативного носимого устройства.
Для крепления геометрического репера 1-4 на стене помещения могут быть использованы липучки, присоски, магниты и другие приспособления.
При привязке радионавигационных датчиков 9 к координатам внутри помещения можно не использовать геометрический репер 1-4 в случае, если форма корпуса датчика содержит геометрический инвариант (корпус имеет цилиндрическую или шарообразную форму) с точно известными размерами. Корпус радионавигационного датчика 9 в виде шайбы представлен на фиг. 9.
На фиг. 10 показан процесс измерения дальности радионавигационного датчика 9 в форме шайбы с помощью портативного носимого устройства 5 оператором по изображению на экране.
Радионавигационный датчик 9, структурная схема которого показана на фиг. 11 предназначен для развертывания ЛСН, осуществляющей навигационную поддержку потребителей ГНСС, работающих в условиях плохой радиовидимости навигационных спутников и отсутствия их сигналов внутри зданий и сооружений с экранирующими стенами.
Радионавигационный датчик 9 представляет собой законченное радиотехническое устройство в корпусе с возможностью подключения внешних антенн, кабелей питания и связи. В состав изделия конструктивно входят модуль радионавигационного датчика и антенно-фидерное устройство 25.
Радионавигационный датчик 9 состоит из модуля процессорного и усилительного блока, представляющих собой печатные платы с набором радиоэлектронных компонентов, установленных методом пайки и винтового монтажа, размещенных в защитном корпусе.
Модуль процессорный содержит управляющий микроконтроллер 10, блок формирования тактового сигнала на базе кварцевого генератора 22, два приемопередатчика сигналов 11, 12 и приемопередатчик связного канала на частоте 850 МГц 13.
Усилительный блок включает усилительные модули 14, 15, в каждом из которых имеется малошумящий усилитель и усилитель мощности.
В антенно-фидерное устройство 25 входят направленная однодиапазонная панельная антенна частоты 450 МГц 26, штыревая мультидиапазонная антенна частоты 868 МГц 27, широкополосная всенаправленная антенна 3G/Wi-Fi 28 и встроенная антенна Bluetooth/Wi-Fi на печатной плате 29.
Во всех приемопередатчиках 11, 12 используется микросхема универсального радиочастотного приемопередающего тракта и микросхема цифрового приема передатчика локальной системы навигации. Для сигналов локальной навигационной системы обеспечивается динамическая смена рабочей псевдослучайной последовательности, выполняется криптографическая защита информации, осуществляется самодиагностика.
Информация о состоянии радионавигационного датчика 9 передается в аппаратно-программный комплекс локальной системы навигации и от него принимаются команды управления, для чего используются проводные интерфейсы Ethernet и USB, а также сеть сотовой связи технологий 2G/3G. Навигационное поле в диапазоне частот от 400 до 2483 МГц, содержащее сигналы локальной навигационной системы, Bluetooth и Wi-Fi, создается независимо от наличия связи в аппаратно-программном комплексе локальной системы навигации.
В радионавигационном датчике 9 используется несколько технологий беспроводной связи и частотных диапазонов, обеспечивающих определение координат с разной точностью (см. таблицу 1).

Все три приемопередатчика 14, 15, 16 включают универсальный радиочастотный приемопередающий тракт и микросхему цифрового приема передатчика локальной системы навигации. В качестве элементной базы могут быть использованы сверхбольшие интегральные схемы (СБИС) К5200МХ014 и К1917 ВС024, разработанные АО «НИИМА «Прогресс» для применения в комплексированной навигационной системе услуг навигации («КОНСУЛ») на основе ЛСН (Корнеев И.Л., Кузнецов А.С., Королев B.C. «Режимы работы локальной системы навигации в проекте «КОНСУЛ». Потребители системы «КОНСУЛ», Наноиндустрия. Спецвыпуск. 2021. 7s. Т. 14 (107). С. 57-59).
К5200МХ014 предназначена для применения в аппаратуре базовых станций и абонентских терминалов ЛСН. Отдельно данная СБИС может применяться в качестве основы аналогового тракта в аппаратуре приема и передачи сигналов с диапазоном частот 0,1…2,5 ГГц и шириной спектра полезного сигнала 50 кГц или 1,25…2,5 МГц.
СБИС К5200МХ014 представляет собой практическую реализацию технологии программно-определяемых радиосистем (Software-Defined Radio - SDR). Технология SDR позволяет упростить цифровую обработку принятых радиосигналов и создать компактные многоканальные радиоприемные устройства на кристалле с постоянной аппаратной конфигурацией, имеющие высокую скорость перестройки частоты, простую и технологичную конструкцию.
На одной кремниевой подложке расположено два приемных и передающих канала: первый предназначен для решения навигационной задачи, второй - для передачи служебной информации. Все управление осуществляется от цифровой части тракта ЛСН по шине SPI.
В СБИС реализован симплекс - одновременная работа приемника и передатчика не поддерживается. Также обеспечивается выдача тактовых частот для цифровых блоков и АЦП/ЦАП.
К1917ВС024 предназначена для применения в радионавигационных опорных станциях и абонентских терминалах ЛСН. Отдельно она может использоваться в качестве микроконтроллера универсального применения.
СБИС К1917ВС024 обеспечивает:
- первичную обработку информации от различных сочетаний пользовательских интерфейсов;
- передачу информации в пользовательские интерфейсы;
- местоопределение объекта посредством передачи псевдослучайной последовательности с использованием технологии CDMA;
- передачу пользовательской информации от объекта;
- прием синхронизирующей информации от радионавигационных опорных станций;
- защиту передаваемой информации;
- возможность обработки принимаемой/передаваемой информации в соответствии с предустановленными алгоритмами;
- выбор источника для загрузки встроенного программного обеспечения;
- проверку целостности программного обеспечения;
- конфигурирование интерфейсов;
- автономное тестирование микросхем.
При работе в частотном диапазоне ЛСН координаты портативного носимого устройства абонента определяются разностно-дальномерным методом, аналогично как при работе по сигналам радионавигационных опорных станций на открытой местности.
Радионавигационные датчики синхронизируются между собой для излучения радиосигнала в строго определенный момент времени. Дальность определяется методом TDoA.
Погрешность измерений в этом случае будет равна

где Δtизм - ошибка измерения времени прихода радиосигнала; Δtсхр - ошибка синхронизации радионавигационных датчиков.
Дальность приема сигналов радионавигационного датчика составляет до 100 м.
Достоинством является то, что количество абонентов, использующих сигналы для определения своего местоположения, не ограничено.
Использование нескольких технологий беспроводной связи позволяет задавать различный уровень точности определения координат для разных категорий абонентов.
В радионавигационном датчике 9 предусмотрена возможность связи с сервером для настройки и удаленного управления режимами работы. Для обмена информацией используются интерфейсы USB 2.0 и Ethernet IEEE 802.3.
Для воспрепятствования несанкционированного получения навигационных данных предусмотрена установка идентификационного электронного модуля абонента и криптографическая защита информации.
На промышленных объектах могут происходить аварии, сопровождающиеся пожарами, затоплением и обрушением сооружений, выбросами вредных веществ, превышением допустимых уровней радиации. В связи с этим нахождение в некоторых помещениях может представлять опасность для персонала.
Радионавигационный датчик 9 может включать датчик концентрации химических веществ, датчик температуры, датчик дыма, или радиационный дозиметр и передавать на сервер информацию о наличии химических веществ в воздушной среде, пожара или радиации в помещении.
На объектах, где имеется вероятность деформации несущих конструкций под действием внешних факторов с последующим сдвигом относительных координат радионавигационных датчиков возможно введение в их конструкцию инерциального блока, датчика удара или датчика силы, выдающего в аппаратно-программный комплекс локальной системы навигации сигнал о произошедшем механическом воздействии, после которого карта и план помещения могли потерять актуальность.
Таким образом, предложенный способ и радионавигационный датчик позволяют осуществлять построение плана помещений с помощью портативного носимого устройства с установленным программным обеспечением, позволяющим создать переход от географических координат к координатам внутри зданий и сооружений, с использованием нейронной сети, позволяющей прокладывать индивидуальные маршруты абонентов с учетом внешних факторов воздействия, приводящих к потере актуальности первоначальных координат в помещениях (затопление, задымление, пожар, радиация, обрушения, завалы, выброс опасных веществ и т.п.), повышение надежности за счет наличия в конструкции радионавигационного датчика нескольких антенн, отдельных приемопередатчиков Bluetooth, Wi-Fi, ЛСН, применения разных методов определения координат абонента (RSSI, TDoA, ToF), связи с аппаратно-программным комплексом локальной системы навигации с помощью модема 2G/3G, либо проводных интерфейсов USB и Ethernet, повышение устойчивости к помехам путем использования для работы нескольких частотных диапазонов и динамически меняющейся по сложному закону псевдослучайной последовательности в сигнале ЛСН, обеспечение автономной работы радионавигационного датчика и его опциональное функционирование в сопряжении с аппаратно-программным комплексом локальной системы навигации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
Изобретение относится к области навигационной техники. Техническим результатом является обеспечение возможности определения местоположения персонала и мобильных роботов, перемещающихся внутри зданий и сооружений. Способ навигации в помещении с использованием радионавигационного датчика заключается в том, что производят построение карты помещения, для чего внутри помещения устанавливают радионавигационные датчики, осуществляют привязку к ним координат с помощью портативного носимого устройства с установленным на нем программным обеспечением, встроенной телекамерой и гироскопами, портативное носимое устройство в каждом углу помещения поочередно прикладывают к каждой из смежных стен, а на противоположную стену помещают геометрический репер, либо портативное носимое устройство размещают в точке, из которой обеспечивается видимость всех геометрических реперов, обнаружение которых осуществляют путем распознавания образов, а дальность определяют угломерным методом с другой выбранной точки с известными координатами, аналогичным образом определяют координаты радионавигационных датчиков и объектов внутри помещения, являющихся препятствиями для передвижения, передают координаты радионавигационных датчиков и карту помещения через модуль связи с аппаратно-программным комплексом локальной системы навигации в аппаратно-программный комплекс локальной системы навигации, имеющий вычислитель на базе нейронного процессора, определяют местоположение персонала и мобильных роботов, перемещающихся внутри зданий и сооружений за счет нейронной сети, реализующейся в аппаратно-программном комплексе локальной системы навигации. 2 н.п. ф-лы, 1 табл., 11 ил.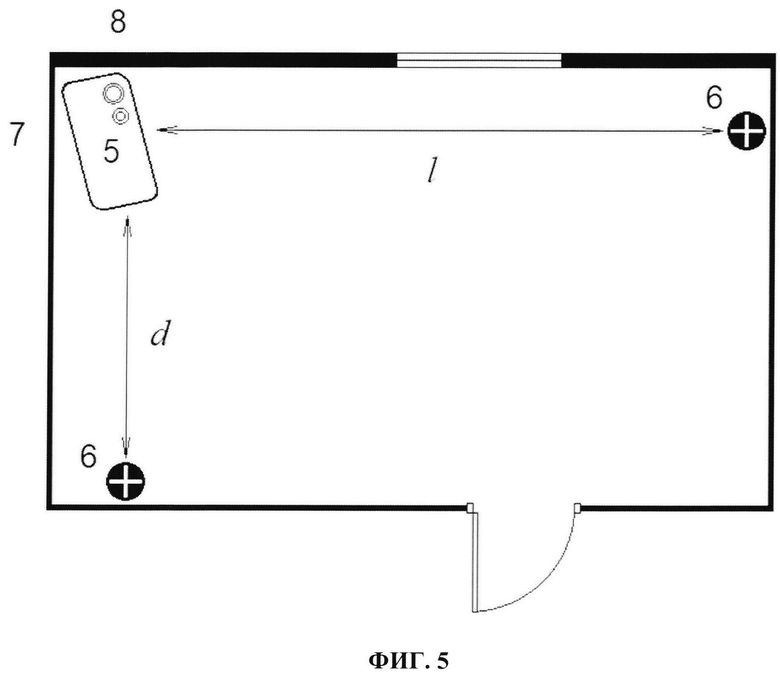
1. Способ навигации в помещении с использованием радионавигационного датчика, содержащего процессорный модуль, усилительный блок, модуль связи с аппаратно-программным комплексом локальной системы навигации, антенно-фидерное устройство и блоки питания радионавигационного датчика, и являющегося частью локальной радионавигационной системы (ЛРС), осуществляющей навигационную поддержку потребителей глобальных навигационных спутниковых систем (ГНСС), работающих в условиях плохой радиовидимости навигационных спутников и отсутствия их сигналов внутри зданий и сооружений с экранирующими стенами, заключающийся в том, что производят построение карты помещения, для чего внутри помещения устанавливают радионавигационные датчики, осуществляют привязку к ним координат с помощью портативного носимого устройства с установленным на нем программным обеспечением, встроенной телекамерой и гироскопами, портативное носимое устройство в каждом углу помещения поочередно прикладывают к каждой из смежных стен, а на противоположную стену помещают геометрический репер, либо портативное носимое устройство размещают в точке, из которой обеспечивается видимость всех геометрических реперов, обнаружение которых осуществляют путем распознавания образов, а дальность определяют угломерным методом с другой выбранной точки с известными координатами, аналогичным образом определяют координаты радионавигационных датчиков и объектов внутри помещения, являющихся препятствиями для передвижения, передают координаты радионавигационных датчиков и карту помещения через модуль связи с аппаратно-программным комплексом локальной системы навигации в аппаратно-программный комплекс локальной системы навигации, имеющий вычислитель на базе нейронного процессора, определяют местоположение персонала и мобильных роботов, перемещающихся внутри зданий и сооружений за счет нейронной сети, реализующейся в аппаратно-программном комплексе локальной системы навигации, при этом может обеспечиваться переход от географических координат к координатам внутри зданий и сооружений, а также режим непрерывной навигации, когда координаты радионавигационных датчиков в протяженных зданиях и сооружениях напрямую привязаны к фактическим географическим координатам.
2. Радионавигационный датчик, содержащий процессорный модуль, который включает управляющий микроконтроллер, два приемопередатчика локальной системы навигации в диапазоне частот от 400 до 470 МГц, приемопередатчик связного канала с частотой 850 МГц и блок формирования тактового сигнала, выполненный на базе кварцевого генератора, при этом усилительный блок включает блок управления двумя усилительными модулями, содержащими малошумящий усилитель и усилитель мощности, при этом модуль связи с аппаратно-программным комплексом локальной системы навигации включает модем 2G/3G, идентификационный электронный модуль абонента, контроллер Ethernet и модуль Bluetooth/Wi-Fi, при этом антенно-фидерное устройство включает направленную однодиапазонную панельную антенну частоты 450 МГц, штыревую мультидиапазонную антенну частоты 868 МГц, широкополосную всенаправленную антенну 3G/Wi-Fi и встроенную на печатной плате антенну Bluetooth/Wi-Fi, при этом питание радионавигационного датчика осуществляется блоком формирования цифрового питания и блоком формирования аналогового питания.
| KR 101427369 B1, 08.08.2014 | |||
| KR 101095017 B1, 20.12.2011 | |||
| KR 101178042 B1, 30.08.2012 | |||
| US 10643344 B1, 05.05.2020 | |||
| US 2023171570 A1, 01.06.2023 | |||
| WO 2023167454 A1, 07.09.2023 | |||
| WO 2019049270 A1, 14.03.2019 | |||
| CN 101206254 A, 25.06.2008 | |||
| CN 101251591 A, 27.08.2008 | |||
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНОГО УСТРОЙСТВА И ГРАФИЧЕСКИХ МЕТОК | 2015 |
|
RU2597517C1 |

