Изобретение относится к навигационной технике и может быть использовано для высокоточного определения координат потребителя в условиях помех, в том числе подвижных объектов, перемещающихся в зоне покрытия локальной системы навигации (ЛСН).
Для определения координат разнообразных подвижных объектов (автотранспорта, пешеходов, морских и речных судов, низколетящих беспилотных летательных аппаратов) широко используются глобальные навигационные спутниковые системы (ГНСС). В некоторых ситуациях, например, в плотной городской застройке, или при наличии источников мощных помех, затрудняющих прием сигналов ГНСС, могут быть использованы ЛСН, позволяющие определять координаты потребителя в зоне покрытия радионавигационных опорных станций (РОС).
Для этих задач АО «НИИМА «Прогресс» была спроектирована ЛСН на элементной базе собственной разработки (Корнеев И.Л., Кузнецов А.С., Королев B.C. «Режимы работы локальной системы навигации в проекте «КОНСУЛ». Потребители системы «КОНСУЛ», Наноиндустрия. Спецвыпуск. 2021. 7s. Т. 14 (107). С. 57-59). В приемопередатчиках РОС и абонентских терминалов используются сверхбольшие интегральные схемы (СБИС) К5200 МХ014 и К1917 ВС024.
СБИС К5200 МХ014 представляет собой практическую реализацию технологии программно-определяемых радиосистем (Software-Defined Radio - SDR). Технология SDR позволяет упростить цифровую обработку принятых радиосигналов и создать компактные многоканальные радиоприемные устройства на кристалле с постоянной аппаратной конфигурацией, имеющие высокую скорость перестройки частоты, простую и технологичную конструкцию.
На одной кремниевой подложке расположено два приемных и передающих канала: первый предназначен для решения навигационной задачи, второй - для передачи служебной информации. Все управление осуществляется от цифровой части тракта ЛСН по шине SPI.
В СБИС реализован симплекс, т.е. одновременная работа приемника и передатчика не поддерживается. Также обеспечивается выдача тактовых частот для цифровых блоков и АЦП/ЦАП.
Отдельно К5200 МХ014 может применяться в качестве основы аналогового тракта в аппаратуре приема и передачи радиосигналов с диапазоном частот 0,1…2,5 ГГц и шириной спектра полезного сигнала 50 кГц или 1,25…2,5 МГц.
СБИС К1917 ВС024 обеспечивает:
- первичную обработку информации от различных сочетаний пользовательских интерфейсов;
- передачу информации в пользовательские интерфейсы;
- местоопределение объекта посредством передачи псевдослучайной последовательности с использованием технологии CDMA;
- передачу пользовательской информации от объекта;
- прием синхронизирующей информации от радионавигационных опорных станций;
- защиту передаваемой информации;
- возможность обработки принимаемой/передаваемой информации в соответствии с предустановленными алгоритмами;
- выбор источника для загрузки встроенного программного обеспечения;
- проверку целостности программного обеспечения;
- конфигурирование интерфейсов;
- автономное тестирование.
Отдельно К1917 ВС024 может использоваться в качестве микроконтроллера универсального применения.
В ЛСН разработки АО «НИИМА «Прогресс» использованы решения, которые значительно повышают помехозащищенность и безопасность по сравнению с ГНСС и аналогичными ЛСН других разработчиков:
- использование сигнала, изменяющегося по сложному закону псевдослучайной последовательности, полностью исключающее его имитацию (т.н. «спуфинг»);
- динамически изменяемые рабочие псевдослучайные последовательности, позволяющие противостоять параллельной информационной атаке;
- широкий диапазон рабочих частот, в котором возможна перестройка;
- мощный и устойчивый к шумовым помехам, по сравнению с ГНСС навигационный сигнал.
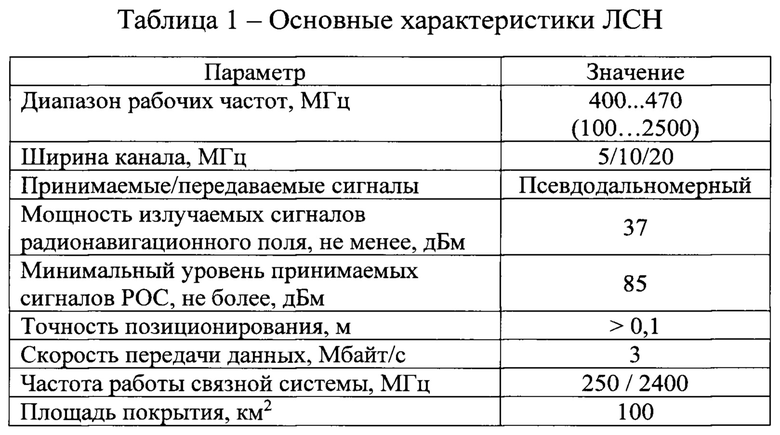
Основные характеристики ЛСН представлены в таблице 1.
Группа из 3…6 РОС, расположенных на одной территории и излучающих на разных частотах, позволяет сформировать т.н. «соты» с кодовым разделением сигналов, из которых формируется радионавигационное поле ЛСН.
Для обеспечения требований различных потребителей в ЛСН предусмотрены два метода определения местоположения: беззапросный или TDoA (англ. Time Difference of Arrival) и запросный SDS-TWR (англ. Symmetric Double Sided Two Way Ranging) являющейся одной из модификаций метода ToF (англ. Time of Flight) и развитием метода RTT (англ. Round Trip Time).
В беззапросном режиме РОС синхронизируются между собой для излучения радиосигнала в строго определенный момент времени. Дальность между абонентским терминалом и РОС определяется как

где Δt - задержка между импульсом метки времени от опорного генератора и приходом радиосигнала; с - скорость света в вакууме.
Погрешность измерений будет равна

где Δtизм - ошибка измерения времени прихода радиосигнала; Δtcxp - ошибка синхронизации РОС.
Для работы в запросном режиме абонентский терминал потребителя использует радиопередатчик. Дальность в этом случае вычисляется по выражению

где Δtaз - аппаратная задержка при излучении навигационного радиосигнала. Погрешность измерений составляет

Запросный метод измерений не всегда может быть реализован в абонентском терминале потребителя, т.к. наличие радиопередающего тракта, увеличивает энергопотребление аппаратуры и ограничивает количество абонентов, одновременно обслуживаемых в одной соте ЛСН.
Снижение погрешности позиционирования за счет улучшения точности синхронизации с помощью высокостабильных рубидиевых и цезиевых стандартов частоты (до значений ~ 10-13 с) приведет к большим материальным затратам на создание и развертывание сети ЛСН.
Аналогичная по своей сути проблема имеет место при навигации по данным ГНСС. Сигналы от навигационных спутников, синхронизированные между собой с погрешностью около 10-13 с, приходят с разных направлений из верхней полусферы, при этом искажения на наклонных атмосферных трассахвносят дополнительную погрешность. Влияние ионосферы, обусловленное столкновениями свободных заряженных частиц с нейтральными молекулами и атомами, приводит к задержке радиосигналов - групповое запаздывание радиоволн, которое обуславливает т.н. ионосферную задержку, связанную с отклонением реальных криволинейных траекторий распространения радиосигнала от прямых линий.
Кроме того, значительную погрешность вносит геометрический фактор, представляющий собой отношение абсолютной погрешности вычисления координат ГНСС-приемника к погрешности измерения дальности до навигационного спутника. При определенном взаимном расположении навигационных спутников (слишком близко друг к другу) значительно возрастает погрешность определения координат потребителя.
Для снижения влияния ионосферной задержки и геометрического фактора используется дифференциальный режим навигации, при котором погрешности навигационных данных списываются в точках, координаты которых известны с погрешностью до нескольких сантиметров.
В этих точках размещены наземные контрольно-корректирующие станции (ККС), координаты которых определены геодезическими методами. Так как дальность до навигационных спутников на два-три порядка больше дальности между ККС и ГНСС-приемников, то принимается допущение, что ККС и ГНСС-приемники принимают навигационные сигналы, которые прошли одинаковый путь распространения и претерпели одни и те же искажения.
ККС, зная свои фактические координаты, определяет поправки, передаваемые по радиолинии ГНСС-приемникам, дополненным дифференциальной подсистемой. Т.к. ККС обеспечивают коррекцию погрешностей в ограниченной зоне, то для охвата обширных территорий потребуется несколько ККС.
Дифференциальный режим может быть реализован в двух вариантах (ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. М. Радиотехника. 2010. 800 с).
Первый подразумевает получение по заданному созвездию навигационных спутников оценок координат ККС, которые сравниваются с заранее известными истинными значениями. По результатам сравнения формируются дифференциальные поправки для обслуживаемых абонентов. Такой подход прост в реализации, т.к. подразумевает, что все ГНСС-приемники работают по одному и тому же созвездию навигационных спутников.
Во втором варианте ККС измеряет псевдодальности до всех видимых навигационных спутников, далее сравнивает их с ожидаемыми значениями псевдодальностей, вычисленных по заранее известным координатам ККС и координатам каждого навигационного спутника, рассчитанным по эфемеридным данным. В качестве дифференциальных поправок передаются погрешности измерений псевдодальностей до навигационных спутников. Этот подход используется в большинстве существующих подсистем дифференциальной коррекции.
В ходе эксплуатации ЛСН возникает проблема обнаружения недостоверных навигационных сигналов от РОС. Процедура выявления недостоверности называется контролем целостности системы, который позволяет исключить неверную информацию из последующей обработки, т.е. изолировать неисправную РОС и информировать абонентов о состоянии ЛСН. Контроль целостности заключается в оценке качества навигационных сигналов и передаваемых с их помощью навигационных данных.
Контроль целостности ГНСС включает в себя контроль навигационных спутников и навигационного поля (ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. М. Радиотехника. 2010. 800 с). Выполняется непрерывное сравнение измеренных значений псевдодальностей до навигационных спутников с ихпрогнозируемыми значениями. По каждому оптимальному созвездию навигационных спутников решается навигационная задача, результаты которой сравниваются с фактическими координатами ККС.
Известна система дифференциальной коррекции (RU пат. №2713571 «Система высокоточной дифференциальной коррекции для контроля подвижных объектов»), включающая децентрализованную сеть из 59 ККС широкозонной системы дифференциальной коррекции и мониторинга (СДКМ) и совокупность пользовательских ГНСС-приемников на подвижных объектах. ККС оборудованы двухчастотными ГНСС-приемниками и формируют дифференциальные поправки, передаваемые по узкополосным каналам через геостационарный или низкоорбитальный спутник связи. ГНСС-приемники подвижных объектов выполняют оценку координат с учетом дифференциальных поправок от трех ближайших ККС, что позволяет учитывать ионосферные и тропосферные погрешности.
Недостатками аналога являются необходимость использования не менее трех ККС и канала спутниковой связи для передачи дифференциальных поправок потребителям, и также низкая помехозащищенность.
Также известна система дифференциальной коррекции навигационных систем летательных аппаратов (RU пат.№2684134 «Портативная наземная система дифференциальной коррекции»), в которой наземная ККС формирует дифференциальные поправки по данным группы опорных ГНСС-приемников, находящихся в группе мест расположения. Входящий в систему источник навигационных данных осуществляет проверку уровня точности данных опорных ГНСС-приемников, находящихся в первой группе мест расположения, и проверку уровня точности данных при перемещении части группы опорных ГНСС-приемников во вторую группу мест расположения. Кроме того, источник навигационной информации содержит устройство контрольного самонаблюдения для определения группы мест расположения, где была размещена группа опорных ГНСС-приемников и для отображения наличия у неетребуемого уровня точности. Если группа опорных приемников обеспечивает требуемый уровень точности, то источник навигационной информации передает на летательный аппарат дифференциальные поправки.
Недостатком аналога является необходимость неподвижного размещения антенн ККС в точках с точно измеренными координатами, сложная конструкция и низкая помехозащищенность.
Также известна радионавигационная система с дифференциальной коррекцией (RU пат. №2152050 «Спутниковая радионавигационная система определения местоположения объекта»), содержащая группировку навигационных спутников, аппаратуру потребителей, по крайней мере одно опорное приемопередающее устройство, а также дополнительную группировку навигационных спутников, устройство интегрального контроля и регистратор данных. Навигационный сигнал, излучаемый каждым из наблюдаемых навигационных спутников основной или дополнительной группировок, принимается ККС, которая функционально состоит из опорного приемопередающего устройства, устройства интегрального контроля, регистратора данных и резервирующей аппаратуры. Опорное приемопередающее устройство определяет истинное значение дифференциальных поправок и передает по радиолинии в аппаратуру потребителей. Устройство интегрального контроля предназначено для контроля прохождения через эфир навигационных сигналов наблюдаемых навигационных спутников и дифференциальных поправок, проверки точности дифференциальной поправки путем параллельного решения задачи местоположения ККС с учетом принятой дифференциальной поправки и последующим сравнением с известными координатами ККС, управления режимами работы ККС и тестирования с помощью имитатора сигналов навигационного спутника. Регистратор данных служит для регистрации и хранения основных параметров работы ККС. Резервирующая аппаратура представляет сбой полный комплект ККС в «горячем» состоянии.
Данное изобретение по технической сущности и достигаемому результату наиболее близко к предложенному техническому решению, и, поэтому, принято в качестве его прототипа.
Известная система предназначена для определения местоположения объектов, использующих режим дифференциальной коррекции. Технический результат заключается в том, что она позволяет обеспечить непрерывный мониторинг навигационных полей ГНСС, формировать информацию о целостности навигационных данных ГНСС, повысить достоверность определения координат объекта за счет использования избыточного количества навигационных спутников.
Недостатки прототипа состоят в сложной конструкции необходимости использования дополнительной группировки навигационных спутников и низкой помехозащищенности.
Задачей разработки является создание способа формирования навигационного поля ЛСН, позволяющего повысить точность определения местоположения в беззапросном режиме абонентскими терминалами, устойчивого к помехам, позволяющего оперативно выполнять проверку целостности навигационного поля ЛСН.
Решением поставленной задачи является способ, реализующий формирование навигационного поля повышенной точности, устойчивого к помехам, отличающийся тем, что навигационное поле ЛСН создается РОС, синхронно передающими радионавигационные сигналы, использующие динамически меняющиеся по сложному закону псевдослучайные последовательности, содержащие информацию о своем местоположении, времени и метеоусловиях, которые принимаются абонентским терминалом, определяющим свое местоположение беззапросным методом, при этом ККС определяет запросным методом дальности до РОС, которые затем сравнивает с псевдодальностями до РОС, полученными беззапросным методом, для оценки взаимной рассинхронизации часов.
Решением поставленной задачи является способ, реализующий формирование навигационного поля повышенной точности, устойчивого к помехам, отличающийся тем, что ККС во время своего нахождения в навигационном поле несколько раз изменяет свое местоположение, для определения которого использует любые доступные ей измерения, например, данные ГНСС, одометрии, инерциальной навигации, в неподвижном состоянии запросным методом получает оценку дальностей до фазовых центров антенн РОС, оставаясь неподвижной в течение времени, достаточного для получения требуемой точности измерений, выполняет методом сетевого уравнивания коррекцию местоположения фазовых центров антенн РОС.
Решением поставленной задачи является способ, реализующий формирование навигационного поля повышенной точности, устойчивого к помехам, отличающийся тем, что используется ККС, которая включает в себя процессорный модуль, усилительный блок и антенно-фидерное устройство, при этом процессорный модуль содержит несколько приемопередатчиков ЛСН, приемопередатчик связного канала, модуль связи с аппаратно-программным комплексом ЛСН, высокостабильный опорный генератор, высокоточный ГНСС-приемник, бесплатформенную инерциальную навигационную систему (БИНС) средней или высокой точности, интерфейсный модуль подключения внешних датчиков, вычислитель, процессорный модуль связан с усилительным блоком, в состав которого входят малошумящий усилитель, набор усилителей и аттенюаторов, а антенно-фидерное устройство имеет комплект антенн и встроенный мультиплексор.
В предпочтительном варианте реализации способа оценки взаимной рассинхронизации часов и взаимного положения РОС, полученные ККС, передаются абонентским терминалам по связному каналу ЛСН или по доступным беспроводным сетям, например, 2G/3G.
В предпочтительном варианте реализации способа ККС оценивает местоположения фазовых центров антенн РОС и передает эти данные на РОС посвязному каналу локальной навигационной системы или по доступным беспроводным сетям, например, 2G/3G.
Представленный способ решает задачу формирования навигационного поля повышенной точности, устойчивого к помехам на основе задела по имеющейся аппаратуре. В приемопередатчиках ЛСН из состава ККС также планируется применение СБИС К5200 МХ014 и К1917 ВС024, используемых в РОС и абонентских терминалах.
Принципиальным вопросом является использование в ККС высокостабильного опорного генератора, стабильность которого должна быть равна или превосходить стабильность опорных генераторов в РОС. Для этого могут быть использованы существующие высокостабильные кварцевые генераторы. Если одна мобильная ККС предназначена для обслуживания большой зоны покрытия ЛСН, состоящей из множества сот, то целесообразно и экономически оправданно применение рубидиевых или цезиевых стандартов частоты и времени.
Координаты ККС могут быть заранее неизвестны, т.к. их знание непринципиально для определения рассинхронизации РОС, а целостность навигационного поля может быть определена в первом приближении путем проверки параметров навигационных сигналов и поочередным расчетом местоположения по сигналам от трех РОС для разных сочетаний всех работающих в данной соте РОС.
Количество сочетаний определяется по известной формуле комбинаторики

Таким образом, для соты из четырех РОС возможно 4 сочетания, для пяти их будет уже 10, а в соте с шестью РОС количество будет равно 20.
В то же время, геодезическая привязка ККС к местности позволяет дополнительно повысить точность выдаваемых дифференциальных поправок и надежность контроля целостности навигационного поля, поэтому при наличии возможностей, целесообразно использовать такой подход.
С другой стороны, простая и компактная конструкция позволяет разместить ККС на подвижном шасси, но тогда должны быть доступны данные от средств автономной навигации. В первую очередь, могут быть использованы данные БИНС средней или высокой точности, при наличии достоверного сигнала от навигационных спутников может быть задействован ГНСС-приемник с дифференциальной подсистемой. С помощью интерфейсного модуля обеспечивается получение дополнительной информации от навигационных датчиков подвижного носителя: телекамер, лидаров, одометров и т.д.
БИНС средней точности на базе волоконно-оптических гироскопов имеют скорость накопления ошибки (уход) 0,5…1,0 м/с. Более сложные и дорогие БИНС высокой точности на базе лазерных гироскопов обеспечивают скорость накопления ошибки 0,01…0,50 м/с. Снизить погрешность позволяет комплексирование с датчиками других типов.
Устанавливаемые на шасси одометры, в зависимости от типа, осуществляют счисление пройденного пути с погрешностью от 0,5 до 5,0% и могут быть использованы для коррекции БИНС.
Методы определения местоположения на основе распознавания образов, полученных с помощью последовательности изображений или «облаков точек», в условиях наличия характерных ориентиров и заранее составленной карты местности, позволяют обеспечить определение координат с погрешностью от единиц до долей метра.
Таким образом может осуществляться привязка мобильной ККС к месту стоянки.
Структурная схема ККС: 1 - процессорный модуль; 2, 3, 4, 5 - приемопередатчики ЛСН; 6 - приемопередатчик связного канала; 7 - модуль связи с аппаратно-программным комплексом ЛСН; 8 - высокостабильный опорный генератор; 9 - высокоточный ГНСС-приемник; 10 - БИНС средней или высокой точности; 11 - интерфейсный модуль подключения внешних датчиков; 12 - вычислитель; 13 - усилительный блок; 14 -малошумящий усилитель; 15 - набор усилителей; 16 - набор аттенюаторов; 17 - антенно-фидерное устройство; 18 - комплект антенн; 19 - мультиплексор.
ЛСН работает либо в беззапросном, либо в запросном режиме измерений, при этом обеспечивается быстрое переключение РОС между режимами работы (менее 1 с).
Таким образом, для обслуживания абонентских терминалов, работающих в беззапросном режиме, ЛСН должна практически постоянно функционировать в беззапросном режиме, периодически на короткое время переключаясь в запросный режим для уточнения координат станции, выдающей дифференциальные поправки для абонентских терминалов.
В беззапросном режиме РОС функционируют с разделением по времени, т.е. излучают навигационный сигнал в порядке заданной очередности, что позволяет оценить качество сигнала и сформировать поправки для каждой РОС по отдельности. Если дальность действия каждой РОС составляет 10 км (для зоны покрытия 100 км2=10 км×10 км), то для разделения сигналов будет достаточно временного интервала 3,5.10-5 с, которым можно пренебречь при оценке местоположения подвижных объектов.
Абонентские терминалы должны получать навигационные данные с частотой 1…5 Гц. Поэтому, переключение между беззапросным и запросным режимами должно осуществляться кратковременно и нечасто.
При результирующей ошибке измерения времени прихода радиосигнала Δtизм=10-10 с формула (4) дает погрешность позиционирования запросным методом, равную ΔD=4,24.10-2 м. Тогда для получения такой же погрешности беззапросным методом по формуле (2), ошибка синхронизации РОС должна составлять Δtcxp<10-9 с.
Если в аппаратуре используется опорный генератор, обеспечивающий кратковременную нестабильность частоты ~ 10-11 с, то коррекция должна проводится не реже, чем каждые 100 сек.
Достигаемый технический результат - создается навигационное поле, повышенная точность которого обеспечивается с помощью подвижной ККС, передающей на РОС полученные оценки рассинхронизации их часов и взаимного положения фазовых центров антенн, а устойчивость к помехам достигается за счет динамически меняющейся по сложному закону псевдослучайной последовательности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
Изобретение относится к навигационной технике и может быть использовано для высокоточного определения координат потребителя в условиях помех, в том числе подвижных объектов, перемещающихся в зоне покрытия локальной системы навигации (ЛСН). Техническим результатом является повышение точности и устойчивости к помехам формируемого локальной системой навигации навигационного поля. Заявленный способ реализует формирование навигационного поля повышенной точности, устойчивого к помехам. Навигационное поле локальной системы навигации создается радионавигационными опорными станциями, синхронно передающими радионавигационные сигналы, использующие динамически меняющиеся по сложному закону псевдослучайные последовательности, содержащие информацию о своем местоположении, времени и метеоусловиях, которые принимаются абонентским терминалом, определяющим свое местоположение беззапросным методом, при этом контрольно-корректирующая станция определяет запросным методом дальности до радионавигационных опорных станций, которые затем сравнивает с псевдодальностями до радионавигационных опорных станций, полученными беззапросным методом, для оценки взаимной рассинхронизации часов радионавигационных опорных станций. 3 з.п. ф-лы, 1 табл.
1. Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации, характеризующийся тем, что навигационное поле локальной системы навигации создают радионавигационными опорными станциями (РОС), синхронно передающими радионавигационные сигналы, использующие псевдослучайные последовательности, динамически меняющиеся по закону, полностью исключающему имитацию сигналов, содержащие информацию о своем местоположении, времени и метеоусловиях, которые принимают абонентским терминалом, определяющим свое местоположение беззапросным методом, при этом при помощи контрольно-корректирующей станции (ККС) определяют запросным методом дальности до радионавигационных опорных станций, которые затем сравнивают с псевдодальностями до радионавигационных опорных станций, полученными беззапросным методом, для оценки взаимной рассинхронизации часов радионавигационных опорных станций, далее получают подвижной контрольно-корректирующей станцией оценки взаимного положения фазовых центров антенн радионавигационных опорных станций посредством того, что во время нахождения ККС в навигационном поле несколько раз изменяют ее местоположение, для определения которого используют измерения одного или нескольких из данных глобальных навигационных спутниковых систем, одометров, телекамер, лидаров, бесплатформенной инерциальной навигационной системы, в неподвижном состоянии запросным методом получают оценку дальностей до фазовых центров антенн РОС, причем ККС остается неподвижной в течение времени, достаточного для получения требуемой точности измерений, и затем выполняют методом сетевого уравнивания коррекцию местоположения фазовых центров антенн РОС и передают на РОС полученные оценки рассинхронизации их часов и взаимного положения фазовых центров антенн РОС.
2. Способ по п. 1, отличающийся тем, что оценки взаимной рассинхронизации часов радионавигационных опорных станций, полученные контрольно-корректирующей станцией, передаются абонентским терминалам по связному каналу локальной системы навигации или по беспроводным сетям стандарта 2G/3G.
3. Способ п. 1, отличающийся тем, что контрольно-корректирующая станция оценивает местоположение фазовых центров антенн радионавигационных опорных станций и передает эти данные на радионавигационные опорные станции по связному каналу локальной системы навигации или по беспроводным сетям стандарта 2G/3G.
4. Способ по п. 1, отличающийся тем, что используют контрольно-корректирующую станцию, которая содержит процессорный модуль, усилительный блок и антенно-фидерное устройство, при этом процессорный модуль включает несколько приемопередатчиков локальной системы навигации, приемопередатчик связного канала, модуль связи с аппаратно-программным комплексом локальной системы навигации, высокостабильный опорный генератор, высокоточный приемник глобальных навигационных спутниковых систем, бесплатформенную инерциальную навигационную систему средней или высокой точности, интерфейсный модуль подключения внешних датчиков, вычислитель, процессорный модуль связан с усилительным блоком, в состав которого входят малошумящий усилитель, набор усилителей и аттенюаторов, а антенно-фидерное устройство имеет комплект антенн и мультиплексор.
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2022 |
|
RU2792013C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ВОЗДУШНОГО СУДНА | 2021 |
|
RU2778938C1 |
| НАВИГАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2555860C2 |
| US 2007040739 A1, 22.02.2007 | |||
| CN 105093247 A, 25.11.2015 | |||
| JP 2008128671 A, 05.06.2008 | |||
| WO 2015112038 A1, 30.07.2015. | |||

