Изобретение относится к радиолокации с активным ответом и может быть использовано в системах радиозондирования атмосферы для измерения наклонной дальности от РЛС до аэрологического радиозонда (АРЗ) импульсным методом, определения параметров движения АРЗ (скорости, закона и направления движения) доплеровским методом, пеленгации его по угловым координатам, а также передачи телеметрической информации о состоянии атмосферы на РЛС.
Известны РЛС с активным ответом, которые кроме определения координат АРЗ, используются также для приема и обработки метеоданных с борта АРЗ. Примером такой РЛС служит система слежения за АРЗ, разработанная английской фирмой Кроули (см. стр. 78-82, [1]; стр. 38-41, [2]; стр. 332-333, [3]). Передатчик РЛС, работающий на частоте 152,5 МГц с импульсной мощностью 50 кВт, генерирует радиоимпульсы запроса с частотой повторения 404 Гц. С помощью антенны типа волновой канал запросные импульсы излучаются в пространство и принимаются приемником АРЗ. Передатчик АРЗ на частоте 2850 МГц вырабатывает ответный радиосигнал с импульсной мощностью 30 Вт. В промежутках между ответными радиоимпульсами передатчик АРЗ передает кодированную информацию о состоянии атмосферы. Прием радиосигналов ответчика наземной станцией производится параболической антенной диаметром 1,5 м. Измерение дальности до АРЗ производится по времени задержки приема ответного радиосигнала относительно запросного, а угловых координат - по данным привода антенны. По этим данным вычисляются скорость и направление ветра. Блок телеметрии наземной станции декодирует принятые сигналы и регистрирует метеорологические данные о состоянии атмосферы (давлении, влажности и температуре).
Известны способы и устройства измерения скорости движущегося АРЗ доплеровским методом, использующие электромагнитное излучение в одном (см. патент US5055849, опубл. 08.10.1991, [4]) и двух (см. патент US5317315, опубл. 31.05.1994, [5]) диапазонах радиочастот. Устройство использует приемопередатчики как на АРЗ, так и на наземной метеорологической станции. Радиосигналы, которыми обмениваются АРЗ и наземная станция, включают в себя доплеровские сдвиги частот, которые наблюдаются как на АРЗ, так и измерительной станции. На основе указанных доплеровских сдвигов частоты производится точное измерение скорости удаления и/или приближения АРЗ относительно измерительной станции. Для определения вектора скорости ветра используются результаты измерения доплеровской частоты, азимутального угла посредством радиопеленгатора наземной станции и данные о высоте АРЗ, получаемые бортовым датчиком давление атмосферы. Процессы доплеровского определения параметров движения АРЗ в атмосфере и передачи-приема телеметрических данных о температуре, влажности и давлении происходят попеременно.
Сложность, громоздкость и большое потребление энергии известных систем радиозондирования являются их недостатками. Наличие отдельных антенн, передатчика и приемника на разные диапазоны частот значительно усложняет и удорожает приемопередающее устройство бортовой аппаратуры АРЗ, которая является по существу расходным материалом при зондировании, поскольку используется разово. Кроме того, большие габариты и вес этой аппаратуры создают угрозу безопасности полетов самолетов.
Предложенные в 50-е годы прошлого столетия сверхрегенеративные приемопередатчики (СПП) сначала использовались в авиационных системах опознавания «свой - чужой» (см. стр. 21, рис. 6, [1]). СПП отличаются предельной простотой конструкции, малыми весом и габаритами благодаря совмещению функций передатчика и приемника в одном каскаде - автогенераторе, работающем в сверхрегенеративном режиме. В те же годы СПП стали применяться в отечественных системах радиозондирования атмосферы в качестве приемоответчиков, совмещающих одновременно передачу метеоданных с борта АРЗ (см. стр. 41-45, [2]; стр. 333-337, [3]; авт. свид. SU115078, опубл. 01.01.1958, [6]).
Высокая чувствительность СПП позволяет сформировать ответный сигнал по дальности в виде короткой паузы в излучении приёмопередатчика при пониженной мощности запросного радиоимпульса радиопередающего устройства РЛС. Достаточно мощное излучение СПП обеспечивает надежное сопровождение АРЗ по дальности и угловым координатам, а также одновременную передачу телеметрической информации о состоянии атмосферы до расстояний 100…150 км (см. авт. свид. SU115078, опубл. 01.01.1958, [6]; стр. 61-67, [7]).
Известен способ измерения координат АРЗ, основанный на измерении времени между посланным и принятым от АРЗ радиоимпульсами, также на измерении угловых координат АРЗ, отличающийся тем, что одновременно с принятым от АРЗ радиоимпульсом принимают текущие метеоданные о состоянии атмосферы и, используя эти данные, вычисляют ошибку наклонной дальности до АРЗ по предложенному математическому выражению (см. патент RU2199764C1 от 27.02.2003, [8]). Принцип действия устройства, реализующего способ измерения координат АРЗ, поясняется его структурной схемой, представленной на фиг. 1 патента [8], на которой изображены АРЗ и метеорологическая РЛС. РЛС содержит антенну, антенный привод, антенный коммутатор, циркулятор, передатчик, приемник, блок определения угловых координат, блок определения дальности, блок определения метеоданных и микропроцессор для управления и обработки данных.
Известен способ определения дальности до АРЗ, включающий подачу запросного когерентного радиоимпульса наземной РЛС на АРЗ, его усиление и синхронизацию фазы радиоимпульсов СПП АРЗ, переизлучение их в направлении РЛС, выделение из принятого излучения СПП когерентных ответных радиоимпульсов, определение времени задержки между запросными и ответными когерентными радиоимпульсами и определение по времени задержки дальности до радиозонда (см. патент RU2304290C2 от 10.08.2007, бюл. №22, [9]).
Известна моноимпульсная РЛС (см. патент RU2368916C2, опубл. 27.09.2009, бюл. №27, [10]), также использующая запросные сигналы в виде когерентных радиоимпульсов для подачи на борт АРЗ. Высокочастотная часть РЛС содержит две разнесенные фазированные антенные решетки, выходы которых подключены через антенно-волноводный тракт его суммарным выходом к антенному переключателю, а разностным - к смесителю амплитудного подканала, включающему также усилитель промежуточной частоты (УПЧ) и фазовый детектор. Выход антенного переключателя соединен со смесителем фазового подканала, включающего также последовательно соединенные УПЧ и фазовый детектор.
Предложенные технические решения систем радиозондирования с применением СПП в качестве приемоответчиков позволили снизить мощность передатчика запросного сигнала, повысить помехоустойчивость комплекса и скрытность работы наземной РЛС при увеличении дальности сопровождения АРЗ до 250…300 км [11, 12].
Однако у систем радиозондирования, использующих в качестве радиолокационного ответчика СПП, имеются их общие существенные недостатки.
1. Недостаточная чувствительность устройства в режиме приёма, которая ограничивается ударными колебаниями, присущими сверхрегенеративному режиму работы СВЧ-генератора при формировании переднего фронта радиоимпульса (см. стр. 140-146, книги [13]; фиг. 4, патента RU2345379C1, опубл. 27.01.2009, бюл. №3, [14]; фиг. 4, патента RU2470323C1, опубл. 20.12.2012, бюл. №35, [15]; статью [16]).
2. Асинхронность процессов формирования приёмного окна СПП и посылок запросных радиоимпульсов РЛС вызывает дополнительные флуктуации временного положения, глубины и продолжительности ответной паузы (см. фиг. 5 патента RU2368916C2, опубл. 27.09.2009, бюл. №27, [10]; стр. 566, рис. 4.4.18, книги [12]). Этот фактор является причиной принципиально неустранимой составляющей дополнительной ошибки измерения наклонной дальности.
3. Реальное расхождение частот приема и передачи СПП из-за нестабильности параметров элементов, снижающее его чувствительность как приемника (см. фиг. 3 и 4 патента RU2172965C1, 27.08.2001, [17]; см. фиг. 5, патента RU2470323C1, 20.12.2012, бюл. №35, [15]; статью [18])
4. Сложность настройки СПП, связанная с тем, что изменения одного из параметров влечёт изменение другого, например, регулировка условий возбуждения колебаний вызывает изменение несущей частоты, что отмечено в патенте RU2470323C1, опубл. 20.12.2012, бюл. №35, [15].
5. Широкий спектр излучения СПП и его шумовой характер создаёт проблемы электромагнитной совместимости, например, работе систем ГЛОНАСС/GPS (см. стр. 532-537, рис. 4.3.34, [12]), а также ограничивает дальность действия системы радиозондирования атмосферы. Ширина спектра по уровню половинной мощности обычно составляет 6...8 МГц в зависимости от длительности формируемых радиоимпульсов (см. рис. 36, стр. 103, [19]; см. фиг. 2 патента RU2368916C2, опубл. 27.09.2009, бюл. 27, [10]).
6. Недостаточная надежность сопровождения АРЗ по дальности из-за снижении глубины ответной паузы СПП при низком уровне приходящих на его вход запросных сигналах на больших расстояниях, ограничивающая радиус действия системы радиозондирования, а также возникающая неоднозначность сопровождения в условиях воздействия сигналов «местников» при пуске АРЗ (см. патент RU2304290C2 от 10.08.2007, бюл. №22, [9]).
Свободными от указанных недостатков являются радиосистемы зондирования атмосферы, использующие в качестве приёмоответчика на борту АРЗ автодинные генераторы [20-24]. Автодинные приемопередатчики (АПП) также как и СПП отличаются экономичностью, малыми габаритными размерами и низкой стоимостью СВЧ модуля. Особенно привлекательным достоинством АПП является узкая полоса частот излучения, которая обеспечивает возможность их использования в условиях современных жёстких требований к электромагнитной совместимости радиосредств. Дополнительным преимуществом предлагаемого решения состоит в возможности применения АПП одновременно в качестве радиотелеметрического передатчика с узкополосной частотной модуляцией (ЧМ) [20].
Наиболее близким аналогом (прототипом) по технической сущности и достигаемому положительному эффекту являются способ, предложенный в патенте RU2789416C1, опубл. 02.02.2023, бюл. №4, [23], и устройство, следующее из описания к этому патенту.
Способ формирования, приема и обработки сигналов прототипа в соответствие с описанием принципа его действия состоит в следующей последовательности действий. Радиоимпульс сигнала запроса передающего устройства РЛС формируют с внутриимпульсной периодической частотной модуляцией и излучают его посредством антенны РЛС в направлении радиозонда. Принимают его на борту посредством антенны АРЗ, преобразуя его в электромагнитные колебания радиоимпульса запроса с внутриимпульсной периодической частотной модуляцией. Воздействуют им на автодинный генератор, вызывая захват и синхронизацию частоты его колебаний, а также автодинные изменения амплитуды колебаний, средних значений тока и/или напряжения в цепи смещения активного элемента с частотой внутриимпульсной частотной модуляции запросного сигнала. Выделяют автодинные изменения генератора в виде радиоимпульса на частоте внутриимпульсной частотной модуляции запросного сигнала. После этого данный радиоимпульс на частоте внутриимпульсной частотной модуляции запросного сигнала последовательно усиливают по амплитуде, фильтруют и преобразуют в видеоимпульс. Далее сравнивают амплитуду видеоимпульса с пороговым уровнем и при превышении амплитудой видеоимпульса порогового уровня формируют импульс, продолжительность которого сравнивают с заданной продолжительностью запросного сигнала. Затем при их равенстве формируют импульс ответной паузы, которым прерывают излучение автодинного генератора. Сравнивая моменты излучения запросного радиоимпульса и приема ответной паузы, в РЛС определяют время запаздывания, по которому затем рассчитывают дальность до АРЗ. Частоту автодинного генератора в промежутках времени между моментами приема запросных сигналов и формирования ответной паузы модулируют сигналом радиотелеметрии. При этом среднюю частоту модулированных колебаний автодинного генератора предварительно совмещают со средней частотой излучения радиоимпульсов с внутриимпульсной периодической частотной модуляцией запросного сигнала, а девиацию частоты запросного сигнала ограничивают условием ее нахождения внутри полосы синхронизации автодинного генератора.
Устройство-прототип, реализующее описанный способ и следующее из описания к патенту RU2789416C1, опубл. 02.02.2023, бюл. №4, [23], содержит связанные между собой через канал радиосвязи наземную базовую станцию - РЛС и аэрологический радиозонд - АРЗ. РЛС содержит антенну РЛС, антенный привод, циркулятор, импульсный передатчик, приемное устройство, синтезатор частоты, блок определения угловых координат, блок определения метеоданных, блок определения дальности, блок обработки данных (БОД) и центральный пульт управления (ЦПУ) и отображения. Антенна РЛС механически связана с антенным приводом, а электрически - через циркулятор с выходом импульсного передатчика и с входом приемного устройства, причем импульсный передатчик и приемное устройство связаны с синтезатором частоты. Выход приемного устройства связан с блоками определения угловых координат, метеоданных и дальности, которые, в свою очередь, связаны с входами БОД, выходы которого присоединены к ЦПУ. Кроме того, антенный привод связан с блоком определения угловых координат. БОД и ЦПУ своими сигналами управления и синхронизации связаны с антенным приводом, импульсным передатчиком и приемным устройством, блоками определения угловых координат, метеоданных и дальности. При этом импульсный передатчик выполнен с возможностью частотной модуляции несущей, к входу управления частотой которого подключен генератор гармонической модуляции. АРЗ содержит блок телеметрии метеоданных и АПП. АПП состоит из последовательно соединенных антенны АРЗ, автодинного генератора, выполненного с возможностью электрического управления частотой, блока регистрации автодинного сигнала на частоте модуляции, резонансного усилителя, полосового фильтра, амплитудного детектора, компаратора, временного селектора импульсов и формирователя импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора. При этом выход блока телеметрии метеоданных подключен к входу управления частотой автодинного генератора, причем АПП работает в режиме захвата частоты автодинного генератора, когда частота передатчика РЛС совпадает с частотой автодинного генератора.
Однако у прототипа и всех известных аналогов, использующих в качестве приемоответчиков СПП и АПП, имеется существенный недостаток, который состоит в низкой точности определения скорости перемещения АРЗ и, соответственно, параметров ветра, из-за применения метода расчета скорости по приращению расстояния.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в повышении точности определения параметров движения (дальности, скорости, закона и направления перемещения) АРЗ.
Решение указанной проблемы основано на использовании эффекта Доплера, явления захвата частоты колебаний и автодинного эффекта генератора, наблюдающегося при воздействии запросного радиоимпульса, а также метода квадратурной обработки принятых от АРЗ сигналов.
Суть предлагаемого способа заключается в том, что для определения параметров движения АРЗ используются, прежде всего, не энергетические, а фазовые характеристики радиолокационных сигналов. Изменения фазы, как известно (см. стр. 352-355, [25]), вследствие перемещения объекта локации в когерентных системах обеспечивают возможность регистрации эффекта Доплера. Получение доплеровского сигнала в предлагаемой системе сопровождается чередой ряда процессов, связанных с фазой радиосигналов. Так, сначала в результате взаимодействия первичных колебаний запросного радиоимпульса РЛС с колебаниями автодинного генератора на АРЗ происходит процесс фазовой синхронизации колебаний этого генератора и при этом запоминание фазы запросного радиоимпульса. Далее, в ходе возвращения радиосигнала от АРЗ к РЛС вследствие инвариантности среды распространения происходит процесс переноса и сохранения фазы колебаний автодинного генератора. Наконец, сравнение фазы возвращенных колебаний с фазой первичных колебаний в РЛС - это финальный процесс, при котором выявляются изменения разности фаз и, соответственно, наличие в сигнале вследствие перемещения АРЗ доплеровского смещения частоты. Поскольку перемещение регистрируется доплеровским сигналом с точностью до долей длины волны излучения (менее 18 см на частоте 1680 МГц), то учет эффекта Доплера при обработке данных о текущем положении АРЗ способствует повышению точности определения его скорости перемещения и, соответственно, параметров ветра. Отметим, что точность определения положения АРЗ известными методами импульсной радиолокации определяется протяженностью объема радиолокационного разрешения цели по дальности (см. рис. 1.2.6, стр. 51, [12]). Среднеквадратическое значение погрешности измерения дальности в режиме автосопровождения для РЛС «Вектор-М» составляет не более 30 метров (см. стр. 86, [12]).
Для решения указанной проблемы предложен способ доплеровского определения параметров движения АРЗ, включающий формирование в передающем устройстве РЛС запросного радиоимпульса, состоящего из двух примыкающих друг к другу частей, первую часть которого заполняют немодулированными когерентными колебаниями несущей частоты, а вторую часть радиоимпульса заполняют несущими колебаниями с внутриимпульсной гармонической частотной модуляцией (ЧМ), передают запросный радиоимпульс по радиоканалу на борт АРЗ, воздействуют им на автодинный генератор, вызывая захват и синхронизацию частоты колебаний автодинного генератора во время действия первой части запросного радиоимпульса, а также автодинные изменения амплитуды колебаний, средних значений тока и/или напряжения в цепи смещения активного элемента с внутриимпульсной гармонической ЧМ во время второй части запросного радиоимпульса, выделяют эти изменения во второй части радиоимпульса на частоте внутриимпульсной ЧМ запросного сигнала, после этого данную часть радиоимпульса на частоте внутриимпульсной ЧМ последовательно усиливают по амплитуде, фильтруют и преобразуют в импульс огибающей, далее сравнивают амплитуду импульса огибающей с пороговым уровнем и при превышении амплитудой импульса огибающей порогового уровня формируют импульс, продолжительность которого сравнивают с заданной продолжительностью второй части запросного радиоимпульса, затем при их равенстве формируют импульс ответной паузы, которым прерывают излучение автодинного генератора, сформированные при этом в автодинном генераторе возмущенные колебания, вызванные воздействием запросного радиоимпульса, и ответную паузу АРЗ передают по радиоканалу на РЛС, где в приемном устройстве радиоимпульс усиливают и нормируют по амплитуде, переносят на промежуточную частоту, выделяют радиоимпульс, соответствующий первой части радиоимпульса, разделяют этот радиоимпульс на два квадратурных канала, смешивают с гетеродинными колебаниями и преобразуют в область низких доплеровских частот, получая квадратурные видеоимпульсы каналов 








далее по полученным отсчетам значений 





где 








где 


где 






Для реализации способа доплеровского определения параметров движения АРЗ предложено устройство, содержащее связанные между собой через канал радиосвязи аэрологический радиозонд - АРЗ и наземную базовую станцию - РЛС, причем РЛС содержит антенну РЛС, антенный привод, циркулятор, импульсный передатчик, синтезатор частоты, приемное устройство, блок определения угловых координат, блок определения метеоданных, блок обработки данных (БОД) и центральный пульт управления (ЦПУ) и синхронизации, при этом антенна РЛС механически связана с антенным приводом, а электрически - через циркулятор с выходом передатчика и с входом приемника, причем передатчик и приемник связаны с синтезатором частоты, при этом передатчик выполнен с возможностью частотной модуляции несущей, к входу управления частотой которого подключен генератор гармонической модуляции, выход приемника связан с блоками определения угловых координат и метеоданных, которые, в свою очередь, связаны с входами БОД, выходы которого соединены с ЦПУ, кроме того, антенный привод связан с блоком определения угловых координат, БОД и ЦПУ своими управляющими сигналами связаны с антенным приводом, передатчиком, приемником, блоками определения угловых координат, метеоданных, причем АРЗ содержит блок телеметрии метеоданных и АПП, при этом АПП состоит из последовательно соединенных антенны АРЗ, автодинного генератора, выполненного с возможностью электрического управления частотой, блока регистрации автодинного сигнала, резонансного усилителя, полосового фильтра, амплитудного детектора, компаратора, временного селектора импульсов и формирователя импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора, при этом выход блока телеметрии метеоданных подключен к входу управления частотой автодинного генератора, причем АПП работает в режиме захвата частоты автодинного генератора, когда частота передатчика РЛС совпадает с частотой автодинного генератора, с целью решения указанной выше проблемы в передатчик, выполненный с возможностью ЧМ несущей, между генератором гармонической модуляции и входом запуска включен формирователь задержки фронта импульса запуска, а между выходом приемника и входом БОД дополнительно введено последовательное соединение блока выделения радиоимпульса промежуточной частоты (БВРПЧ) и блока определения параметров движения (БОПД), причем БВРПЧ содержит последовательно соединенные детектор огибающей, инвертор, временной дискриминатор, фильтр нижних частот (ФНЧ), формирователь переменной задержки, первый формирователь полуширины запросного импульса (ФПЗИ-1), второй формирователь полуширины запросного импульса (ФПЗИ-2), формирователь пары примыкающих импульсов, выходы которого подключены к входам управления временного дискриминатора, при этом выход ФПЗИ-1 дополнительно подключен к входу управления селектора радиоимпульса промежуточной частоты (ПЧ), включенного между входом БВРПЧ и его выходом, при этом БОПД содержит первый и второй смесители квадратурных каналов
Сущность изобретения поясняется чертежами.
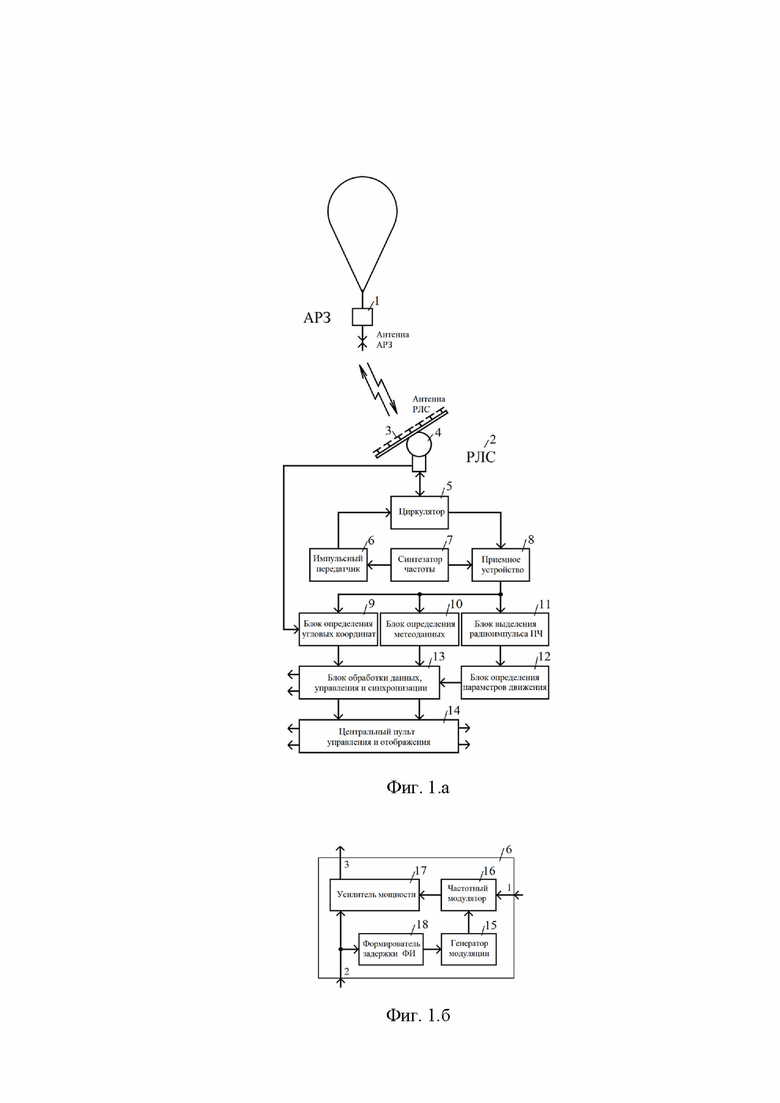
На фиг. 1,а представлена структурная схема системы радиозондирования атмосферы, реализующей предложенные способ и устройство. На ней изображено: 1 - АРЗ; 2 - наземная часть РЛС; 3 - антенна РЛС; 4 - антенный привод; 5 - циркулятор; 6 - импульсный передатчик; 7 - синтезатор частоты; 8 - приемное устройство; 9 - блок определения угловых координат; 10 - блок определения метеоданных; 11 - блок выделения радиоимпульса промежуточной частоты (БВРПЧ); 12 - блок определения параметров движения (БОПД); 13 - блок обработки данных (БОД), управления и синхронизации; 14 - центральный пульт управления (ЦПУ) и отображения.
На фиг. 1,б показана структурная схема импульсного передатчика 6: 15 - генератор гармонической модуляции; 16 - частотный модулятор; 17 - усилитель мощности; 18 - формирователь задержки фронта импульсов запуска, а также первый, второй и третий выводы передатчика (соответственно обозначены мелким шрифтом).
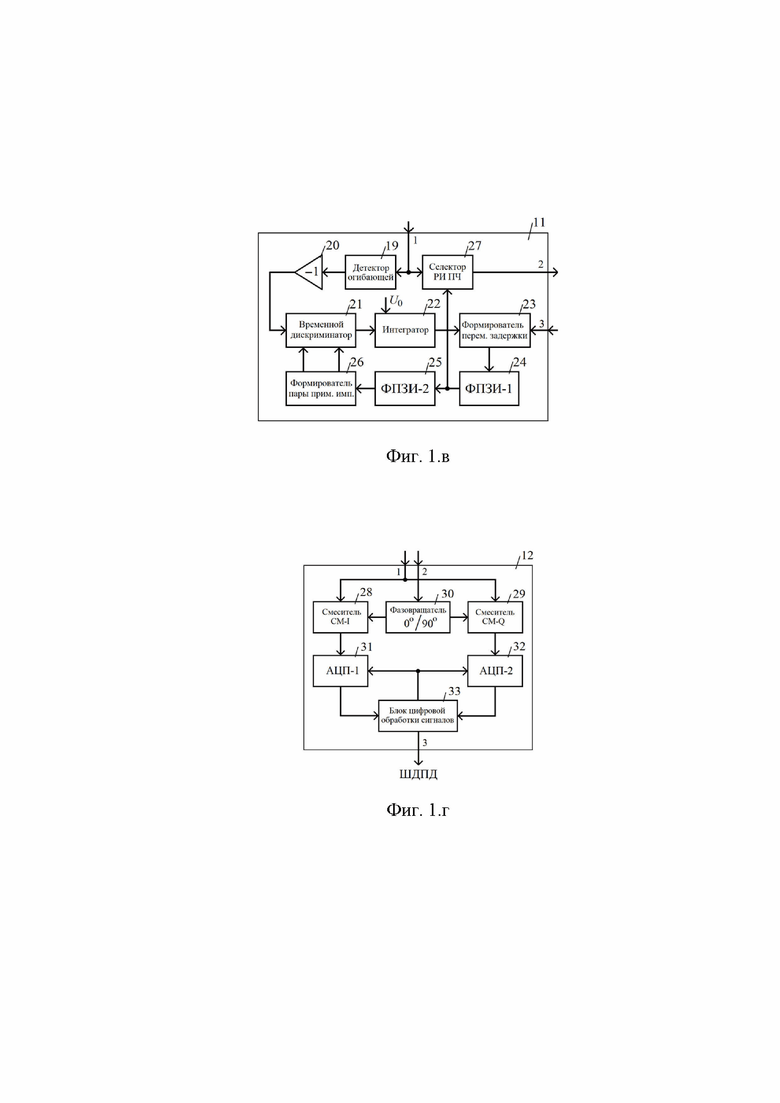
На фиг. 1,в представлена структурная схема блока 11 выделения радиоимпульса промежуточной частоты (БВРПЧ): 19 - детектор огибающей; 20 - инвертор; 21 - временной дискриминатор; 22 - интегратор; 23 - формирователь переменной задержки; 24 - первый формирователь полуширины запросного импульса (ФПЗИ-1); 25 - второй формирователь полуширины запросного импульса (ФПЗИ-2); 26 - формирователь пары примыкающих импульсов; 27 - селектор радиоимпульса промежуточной частоты, а также первый, второй и третий выводы БВРПЧ (соответственно обозначены мелким шрифтом).
На фиг. 1,г приведена структурная схема блока 12 определения параметров движения (БОПД) 12: 28 и 29 - первый и второй смесители квадратурных каналов
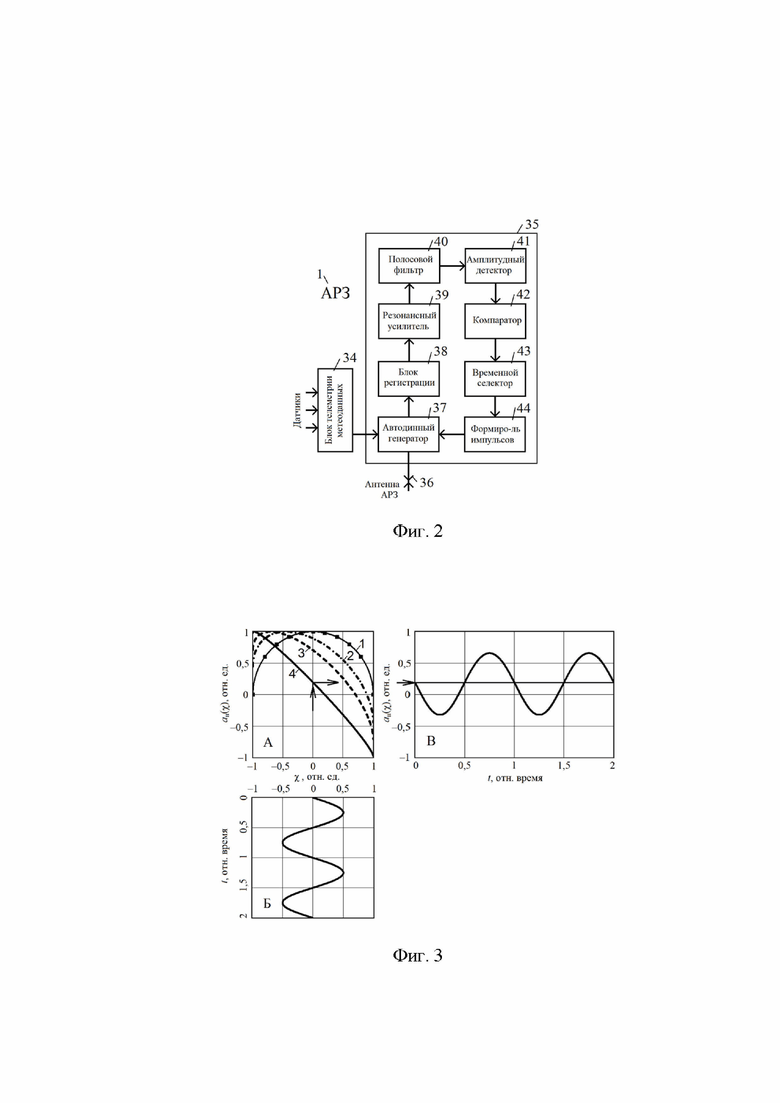
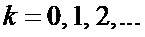
На фиг. 2 раскрыта структурная схема АРЗ 1: 34 - блок телеметрии метеоданных; 35 - автодинный приемопередатчик (АПП); 36 - антенна АРЗ; 37 - автодинный генератор; 38 - блок регистрации автодинного сигнала; 39 - резонансный усилитель; 40 - полосовой фильтр; 41 - амплитудный детектор; 42 - компаратор; 43 - временной селектор; 44 - формирователь импульсов ответной паузы.
На фиг. 3 представлены характеристики и временные диаграммы, поясняющие принцип преобразования радиосигнала с гармонической ЧМ в радиосигнал частоты модуляции посредством синхронизированного автодинного генератора.
Предлагаемое устройство характеризуется следующими связями и соединениями.
Радиолокационная система радиозондирования атмосферы (устройство) содержит связанные между собой через канал радиосвязи аэрологический радиозонд - АРЗ 1 (см. фиг. 1,а) и наземную базовую станцию - РЛС 2 радиозондирования атмосферы. РЛС 2 содержит антенну 3 РЛС, которая механически связана с антенным приводом 4, а электрически - через циркулятор 5 с выходом импульсного передатчика 6 и входом приемного устройства 8, причем передатчик 6 и приемное устройство 8 связаны с синтезатором 7 частоты. Выход приемника 8 связан с блоками определения угловых координат 9, метеоданных 10 и выделения радиоимпульса ПЧ 11, выход последнего связан с блоком 12 определения параметров движения. Выходы блоков определения угловых координат 9, метеоданных 10 и определения параметров движения 12 связаны с входами БОД 13, выходы которого присоединены к ЦПУ 14. Антенный привод 4 связан с блоком 9 определения угловых координат. БОД 13 и ЦПУ 14 своими управляющими и синхронизирующими сигналами связаны с антенным приводом 4, импульсным передатчиком 6, синтезатором 7 частоты, приемным устройством 8, блоками определения угловых координат 9, метеоданных 10, выделения радиоимпульса ПЧ 11 и параметров движения 12 (на фиг. 1,а эти связи не показаны).
Импульсный передатчик 6 содержит (см. фиг. 1,б) генератор 15 модуляции, частотный модулятор 16, усилитель 17 мощности, формирователь 18 задержки фронта импульса запуска, первый, второй и третий выводы передатчика 6, причем его первый вывод подключен к входу частотного модулятора 16, выход которого подключен к входу усилителя 17 мощности, выход которого соединен с третьим выводом передатчика 6, при этом его второй вывод подключен к управляющим входам усилителя 17 мощности и формирователя 18 задержки фронта импульса запуска, выход которого соединен с управляющим входом генератора 15 модуляции, при этом первый вывод передатчика 6 является входом сигнала синтезатора 7 частоты, второй вывод является входом запуска передатчика 6, а третий вывод - высокочастотным выходом передатчика 6.
Блок 11 выделения радиоимпульса ПЧ (БВРПЧ), содержит (см. фиг. 1,в) первый вывод БВРПЧ, к которому подключено последовательное соединение детектора 19 огибающей, инвертора 20, временного дискриминатора 21, интегратора 22, формирователя 23 переменной задержки, первого формирователя 24 полуширины запросного импульса (ФПЗИ-1), второго формирователя 25 полуширины запросного импульса (ФПЗИ-2), формирователя 26 пары примыкающих импульсов, выходы которого подключены к входам управления временного дискриминатора 21, при этом выход ФПЗИ-1 24 дополнительно подключен к входу управления селектора 27 радиоимпульса промежуточной частоты (ПЧ), включенного между первым и вторым выводами БВРПЧ, причем его первый вывод является входом блока 11, второй вывод - его выходом, а третий вывод, подключенный к входу запуска формирователя 23 переменной задержки, является входом синхронизации.
Блок 12 определения параметров движения (см. фиг. 1,г) содержит первый 28 и второй 29 смесители квадратурных каналов
АРЗ 1 содержит (см. фиг. 2) блок 34 телеметрии метеоданных, к которому подключены датчики метеоданных, и автодинный приемопередатчик (АПП) 35, при этом АПП 35 состоит из последовательно соединенных антенны 36 АРЗ, автодинного генератора 37, выполненного с возможностью электрического управления частотой, блока 38 регистрации автодинного сигнала на частоте модуляции, резонансного усилителя 39, полосового фильтра 40, амплитудного детектора 41, компаратора 42, временного селектора 43 импульсов и формирователя 44 импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора 37, при этом выход блока 34 телеметрии метеоданных подключен к входу управления частотой автодинного генератора 37, причем АПП 35 работает в режиме захвата частоты автодинного генератора 37, когда частота передатчика 6 РЛС совпадает с частотой автодинного генератора 37.
Указанные узлы и блоки могут быть взяты или выполнены на типовых элементах современных РЛС радиозондирования атмосферы, также может быть взят целиком в пределах границ прототипа серийно выпускаемый аэрологический радиолокационный вычислительный комплекс АРВК «Вектор-М» (см. Аэрологический радиолокационный вычислительный комплекс «Вектор-М». Руководство по эксплуатации. ИВТЯ.400800.001РЭ на сайте: http://vektor.ru/produktsiya/grajdanskaya_produktsiya/vektor_meteo/meteorologicheskie_sistemyi/arvk_vektor_m), выпускаемый на предприятии АО «Вектор». Основные технические решения АРВК «Вектор-М» защищены рядом патентов, например, RU2199764C1, опубл. 27.02.2003, [8]; RU2304290C2, опубл. 10.08.2007, [9]; RU37559U1, опубл. 27.04.2004, [26]; RU49368U1, опубл. 10.11.2005, бюл. 31, [27]; RU71777 U1, опубл. 20.03.2008, [28]. Описание принципа действия АРВК «Вектор-М» и аналогичной системы «Бриз» представлено также на стр. 74-87, монографии [12].
Блоки и узлы предлагаемой системы радиозондирования атмосферы, могут быть выполнены на следующих элементах и интегральных микросхемах общего применения.
Антенна 3 РЛС может быть выполнена в виде фазированной антенной решетки (ФАР) согласно патенту RU2161847C1, опубл. 10.01.2001, [29]. Циркулятор 5 - широко известный специалистам невзаимный элемент передающих трактов СВЧ (см. стр. 290-294, [30]).
Импульсный передатчик 6 (см. фиг. 1,б) может быть реализован на основе известного усилителя мощности, выполненного на транзисторах (см. фиг. 5, статьи [31]). Частотный модулятор 15 может быть реализован на основе применения принципа фазовой модуляции опорных колебаний, полученных, например, от синтезатора частоты (см. рис. 19.9,а, стр. 334-337, [32]). При этом генератор 14 модуляции может быть выполнен на транзисторе по схеме трехточки с кварцевой стабилизацией частоты (см. рис. 8.21, стр. 150, [32]). Формирователь 17 задержки фронта импульса запуска может быть выполнен на микросхеме К564АГ1 по схеме, представленной на рис. 2.83,а, стр. 290, [33].
Синтезатор 7 частоты (см. фиг. 1,а), генерирующий опорные колебания для передатчика (например, 1680 МГц) и гетеродинные колебания для приемника (например, 1480 МГц) может быть выполнен на микросхеме ADF4252 фирмы Analog Device. Принципы практической реализации и расчета современных синтезаторов частоты СВЧ диапазона на заданную частоту широко известны и изложены, например, в книге [34].
Приемное устройство 8 (см. фиг. 1,а) может быть выполнено по супергетеродинной схеме с учетом широко известных принципов проектирования приемных устройств импульсных сигналов (см. стр. 234-252, [35]). Входной каскад приемного устройства 8 может быть выполнен на малошумящем усилителе с задержанной АРУ (см. стр. 102, рис. 3.20, [36]).
Блок 11 (см. фиг. 1,в) выделения радиоимпульса ПЧ реализует известный принцип системы слежения за временным положением импульсного сигнала в радиолокационных измерителях дальности (см. стр. 108-118, рис. 2.20, пособия [37]). Отличие от известных систем состоит лишь в том, что в данном случае слежение производится не за импульсом, а за временным положением ответной паузы в принятом от АРЗ 1 сигнале. Детектор 19 огибающей может быть выполнен по последовательной или параллельной схеме амплитудного диодного детектора (см. рис. 7.1, стр. 123, рис. 7.8, стр. 131, [35]). Инвертор 20 может быть выполнен на микросхеме операционного усилителя, включенного по схеме инвертирующего усилителя (см. стр. 31-32, рис. 2.1, книги [38]). Временной дискриминатор 19 может быть выполнен на базе двух логических элементов «И» и «И-НЕ» и трех электронных ключей по схеме, приведенной на рис. 2.32, стр. 112 пособия [37] на цифровых микросхемах КМОП, например, серии К564 [33]. Интегратор 22 могут быть выполнены по известным схемам инвертирующего или неинвертирующего интегратора на микросхемах операционного усилителя (см. рис. 8.2 - 8.4, стр. 138-142 справочника [38]). Формирователь 23 переменной задержки, формирующий импульс, длительность которого определяется величиной выходного напряжения интегратора 22, а момент его начала - запускающим импульсом, который поступает от ЦПУ 14 через третий вывод, может быть выполнен различным образом. Известны технические решения формирователей в аналоговом выполнении. Среди них наиболее распространены формирователи, принцип действия которых основан на сравнении порогового напряжения с напряжением, которое линейно изменяется во времени по пилообразному закону (см., например, авт. свид. SU1236599A1, опубл. 07.06.1986, бюл. 21, [39], стр. 208-212 пособия [40], стр. 323-325, [41]). К аналоговым относится также, так называемый, фазометрический метод, основанный на сравнении фаз опорного гармонического колебания и смещенного по фазе колебания (см. стр. 208-212 пособия [40]). Известны также методы дискретного (квантового) (см. стр. 208-212 пособия [40]) и цифрового получения переменной задержки (стр. 49-56, [42]). Первый 24 и второй 25 ФПЗИ-1 и ФПЗИ-2, а также формирователь 26 пары примыкающих импульсов могут быть выполнены по схеме последовательно соединенных ждущих мультивибраторов на микросхеме К564АГ1 (см. рис. 2.83,а на стр. 290, [33]). Селектор 27 радиоимпульсов ПЧ может быть выполнен на микросхеме аналогового коммутатора К564КТ3 (см. рис. 2.27, стр. 226, [33]).
Блок 12 определения параметров движения (БОПД) представляет собой широко известное устройство для дискретной (цифровой) обработки радиосигналов в трактах промежуточной частоты (см. стр. 146-160, рис. 12.1 книги [43]). Является аналогом известных оптимальных приемников для обнаружения радиоимпульсных сигналов и измерения их параметров (см. стр. 234-252, [35]). Первый 18 и второй 19 квадратурные смесители сигналов идентичны и могут быть выполнены на полупроводниковых диодах по схеме балансного преобразователя частоты (см. стр. 102, рис. 5.26, [35]). Фазовращатель 20 на два квадратурных выхода обеспечивает относительно входного сигнала получение на выходах двух сигналов, сдвинутых по фазе на 90 градусов. В зависимости от диапазона частот может быть выполнен на основе индуктивности и емкости по известным в теории электрических цепей правилам (см. стр. 92-94, рис. 6.11, [44]) или использован компактный направленный ответвитель, предложенный в патенте на полезную модель RU187315U1, опубл. 01.03.2019, [45]. В качестве первого 21 АЦП-1 и второго 22 АЦП-2 предпочтительно использование микросхем быстродействующих АЦП [46], выпускаемых, например, фирмами «Analog Devices» и Texas Instruments. Блок 23 цифровой обработки сигналов может быть выполнен на основе сигнального процессора, например, контроллера семейства MSP430X1XX [47]. Данный контроллер содержит: постоянное запоминающее устройство (ПЗУ), хранящее программу обработки сигналов; высокоскоростное вычислительное ядро, выполняющее функции цифровой обработки сигнала (спектральный анализ, цифровую фильтрацию сигнала и формирование данных, индикации); оперативное запоминающее устройство (ОЗУ), выполняющее функции запоминания текущих значений и результатов отработки сигналов; приемопередатчики шин последовательного порта для передачи и обмена информацией по шине данных параметров движения (ШДПД) с блоком обработки данных 12.
Блоки 13 (см. фиг. 1,а) обработки данных и ЦПУ 14 могут быть выполнены на базе микропроцессоров, например, фирмы Intel [48].
Для реализации блока 34 телеметрии метеоданных на борту АРЗ 1 (см. фиг. 2) известны технические решения, обеспечивающие метод пакетной передачи данных (см. патент RU2529177C1, опубл. 27.09.2014, [49]).
Реализация АПП 35 (см. фиг. 2) описана в патенте прототипа RU2789416C1, опубл. 02.02.2023, бюл. 4, [23]. Антенна 36 АРЗ может быть выполнена в виде несимметричного четвертьволнового вибратора, как показано на фиг. 4 и 8 патента RU2214614C2, опубл. 20.10.2003, [50]). Автодинный генератор 37, выполненный с возможностью электрической перестройки частоты, может быть собран на полевом транзисторе по схеме, представленной на стр. 88, рис. 3.7 книги [51]). Блок 38 регистрации автодинного сигнала имеет альтернативные технические решения. Например, при получении сигнала в цепи питания автодинного генератора 37 блок 38 регистрации может быть выполнен в соответствие с одной из схем, представленных на рис. 14 статьи [52], или по схеме с трансформаторно-емкостной связью контуров (см. рис. 74, монографии [53]. В случае регистрации сигнала по изменению амплитуды колебаний блок 38 регистрации автодинного сигнала обычно выполняется на основе детекторного диода. Этот диод помещается непосредственно в резонатор автодинного генератора 37 или в связанную с резонатором передающую линию, как показано на фиг. 2 патента [54] и на рис. 6а и 9а статьи [52]. Резонансный усилитель 39 автодинного сигнала может быть выполнен в виде обычного полосового усилителя с линейной или логарифмической амплитудной характеристикой в рабочем диапазоне уровней сигнала (см., например, стр. 60, рис. 4.3, [35]). В качестве полосового фильтра 40 может использоваться фильтр на поверхностных акустических волнах (ПАВ), с центральной частотой, равной частоте автодинного сигнала, а полоса 

В структурных схемах, представленных на фиг. 1, не раскрыты некоторые узлы, блоки и связи между ними, которые не являются обязательными при рассмотрении предлагаемого способа. К ним относятся, например, общая схема синхронизации РЛС, цепи управления от БОД 13 ЦПУ 14 приводом 4 антенны 3. Кроме того, не показаны внутренние структуры синтезатора 7 частоты, приемного устройства 8, блоков определения угловых координат 9, метеоданных 10, обработки данных 13 и ЦПУ 14, а также блока 34 телеметрии метеоданных (более полная структурная схема РЛС «Бриз» и «Вектор» представлена на стр. 80 монографии [12]).
Более подробно суть предлагаемого способа рассмотрим на примере функционирования описанной выше реализации системы радиозондирования.
В рабочем режиме системы радиозондирования (см. фиг. 1,а) АРЗ 1 находится в поле излучения антенны РЛС 2. Для этого по командам оператора через ЦПУ 14 привод 4 совмещает ось диаграммы направленности антенны 3 РЛС 2 с направлением на АРЗ 1, при котором через образовавшийся радиоканал наблюдается устойчивая связь «запрос-ответ». В этом режиме импульсный передатчик 6 РЛС 2 вырабатывает периодические радиоимпульсы запроса на несущей частоте 



Формируемые запросные радиоимпульсы разделены примерно на две равные части. Первая часть заполняется немодулированными колебаниями на несущей частоте РЛС, а вторая часть радиоимпульса заполняется несущими колебаниями с внутриимпульсной гармонической частотной модуляцией (ЧМ). Для получения таких радиоимпульсов на первый вывод импульсного передатчика 6 от синтезатора 7 поступают колебания на несущей частоте (см. фиг. 1,б). От этого вывода они через частотный модулятор 16 следуют на вход усилителя 17 мощности. При поступлении на второй вывод передатчика 6 импульса запуска генератор 15 модуляции в течение первой части импульса не работает. В этом случае усилитель 17 мощности усиливает немодулированные несущие колебания, формируя первую часть запросного радиоимпульса.
Для формирования второй части импульса используется генератор 15 модуляции, который активируется выходным импульсом формирователя 18 задержки фронта импульса. Выходным напряжением генератора 15 производится модуляция фазы колебаний несущей в частотном модуляторе 16 по гармоническому закону во время формирования второй части импульса запуска передатчика 6. При этом модуляция несущей производится в диапазоне 10...20 МГц при постоянной величине девиации частоты, которая должна быть менее полосы пропускания полосового фильтра 40 АПП 35 на борту АРЗ 1.
Сформированные таким образом радиоимпульсы, состоящие из двух частей, с выхода усилителя 17 мощности через третий вывод передатчика 6 и циркулятор 5 посредством направленной антенны 3 РЛС 2 излучаются в виде электромагнитных (ЭМ) волн в направлении АРЗ 1. Выражение для запросного сигнала 

где








Принятое на борту АРЗ 1 антенной 36 ЭМ излучение на частоте 
Одно из фундаментальных явлений, характерных этим системам, применительно к предлагаемой системе радиозондирования состоит в том, что если частота воздействующего на автодинный генератор 37 сигнала находится внутри полосы его синхронизации, то происходит захват частоты и ее удержание с точностью до фазового сдвига [57]. Поэтому реакция автодинного генератора 37 на воздействие первой части запросного радиоимпульса состоит лишь в фиксации фазы колебаний генератора 37 на частоте этого радиоимпульса.
При воздействии на автодинный генератор 37 второй части запросного радиоимпульса, когда его частота несущей изменяется, эти изменения частоты (и фазы) вызывают соответствующие изменения частоты и амплитуды колебаний автодинного генератора 37, а также среднего значения величины смещения (тока или напряжения) активного элемента. Данные явления широко описаны в литературе [57-59], а также отмечены области их применения, например, используются для детектирования частотно-модулированных (ЧМ) колебаний (см. стр. 175-178, [60]).
На фиг. 3 представлены диаграммы, поясняющие принцип демодуляции ЧМ посредством синхронизированного автодинного генератора 37. На диаграммах под литерой «А» приведены нормированные относительно максимальных значений амплитудно-частотные характеристики (АЧХ) 








где









На диаграмме под литерой «Б» приведена временная диаграмма 
На диаграмме под литерой «В» приведена временная диаграмма 

Из представленных графиков видно, что с увеличением коэффициента 
Необходимо отметить, что по обеим осям АЧХ (см. фиг. 3) денормированные переменные 


где









Беря отношение выражений (2) и (3) с учетом того, что максимальные значения 

где




Из полученной формулы (4) видно, что крутизна 





Таким образом, при воздействии на автодинный генератор 37 второй части запросного радиоимпульса, он преобразуется в радиоимпульс такой же длительности, заполненный колебаниями с частотой внутриимпульсной ЧМ. При этом амплитуда преобразованного радиоимпульса при постоянной величине девиации частоты прямо пропорциональна амплитуде сигнала запросного радиоимпульса. Выражение для преобразованного радиоимпульса 

где



Необходимо отметить, что величина девиации частоты несущей РЛС 2 выбирается при минимальном уровне запросного сигнала, который соответствует максимальной дальности от РЛС 2 до АРЗ 1. Это обеспечивает стабильность работы АПП 35 во всем диапазоне дальностей от десятков метров до дальности, ограниченной энергетическим потенциалом системы и рельефом местности (200…250 км).
После усиления в усилителе 39 этот радиоимпульс проходит частотную селекцию полосовым фильтром 40, затем в линейном амплитудном детекторе 41 преобразуется в видеоимпульс и, в случае превышения порогового уровня, заданного компаратором 42, полученные импульсы с выхода компаратора 42 поступают на вход временного селектора 43 запросных импульсов. Временной селектор 43 импульсов при соответствии длительности второй части и периода повторения принятых импульсов временным параметрам запросных сигналов РЛС 2, вырабатывает импульс, поступающий на вход формирователя 44 импульса ответной паузы.
Формирователь 44 импульса ответной паузы производит кратковременное (порядка 1...2 мкс) прерывание работы автодинного генератора 37 и, соответственно, передачи ЭМ колебаний от генератора 37 в антенну 36 АРЗ 1. Данное прерывание достигается в простейшем случае путём электронного отключения питания генератора 37.
Необходимо отметить, что независимо от процессов приема запросного радиоимпульса, идентификации и формирования ответной паузы в автодинном генераторе 37 его колебания подвергаются узкополосной ЧМ сравнительно «медленным» (например, 2,4/1,2 кбит/с) сигналом телеметрии с пакетным методом передачи информации (см. патент RU2529177C1, опубл. 27.09.2014, бюл. 27 [49]). Для этого кодированный сигнал с метеорологическими данными от блока 34 телеметрии метеоданных поступает на встроенный в резонатор автодинного генератора 37 варикап. Выходные колебания автодинного генератора 37, включая возмущенные воздействием запросного радиоимпульса и ответную паузу, через антенну 36 АРЗ 1 в виде ЭМ волн излучаются на несущей частоте 


где



Направленная антенна 3 РЛС 2 (см. фиг. 1,а) улавливает ЭМ волны АРЗ 1 и преобразует их в высокочастотные колебания, которые через циркулятор 5 поступают в качестве принятого радиосигнала в приемное устройство 8. Здесь радиосигнал усиливается и нормируется благодаря действию задержанной АРУ по амплитуде, смешивается с гетеродинными колебаниями, поступающими от синтезатора 7 частоты, и преобразуется на промежуточную частоту (ПЧ). Далее радиосигнал на ПЧ направляется по трем направлениям: в блок 9 определения угловых координат, блок 10 определения метеоданных и блок 11 выделения радиоимпульса ПЧ.
В блоке 9 определение угловых координат положения АРЗ 1 относительно РЛС 2 выполнено методом нахождения равносигнального направления при квадрантном сканировании диаграммы направленности антенны 3. Сканирование выполнено путем управления фазой возбуждения элементов ФАР антенны 3 по командам ЦПУ 14. Результат сканирования отслеживается путем анализа амплитуды принятого на ПЧ радиосигнала. Данные угловых датчиков, полученные от привода 4 антенны, далее направляются в блок 13 обработки данных.
В блоке 10 определения метеоданных поступивший от приемного устройства 8 радиосигнал в виде колебаний на ПЧ с узкополосной ЧМ демодулируют посредством частотного детектора, фильтруют и дешифрируют его, получая метеоданные о состоянии атмосферы. Результаты дешифрации далее направляются в блок 13 обработки данных.
Сигнал, поступающий в блок 11 выделения радиоимпульса ПЧ на его первый вывод от приемного устройства 8 (см. фиг. 1,в), представляет собой совокупность практически непрерывного радиосигнала с ЧМ, периодических ответных радиоимпульсов АРЗ и ответной паузы в виде кратковременного прерывания сигнала, следующей следом за радиоимпульсом. При этом ответный радиоимпульс АРЗ, несущий в себе реакцию автодинного генератора 37 на запросный радиоимпульс, никак не выделяется по амплитуде относительно остальной части радиосигнала. Радиоимпульс состоит, напомним, из двух частей, из которых первая часть является информативной, она «хранит» информацию о фазе возвращенного от АРЗ сигнала, а вторая часть, содержащая ЧМ заполнение, не представляет интереса при обработке сигнала. Поэтому для выделения первой части ответного радиоимпульса в блоке 11 используется временной признак определения ее местоположения относительно ответной паузы. Эта пауза в виде прерывания сигнала легко идентифицируется на фоне принимаемого радиосигнала с помощью следящей системы, которая широко используется в импульсных радиолокаторах для определения дальности (см. стр. 108-118, рис. 2.30, пособия [37]). Отличие от известных систем состоит лишь в том, что в данном случае слежение производится за импульсом, который получен из ответной паузы путем детектирования огибающей сигнала детектором 19 огибающей и последующего инвертирования ее уровня инвертором 20. Работа этой системы слежения основана на непрерывном сравнении измеренного ранее времени запаздывания сигнала до АРЗ 1 и истинного времени запаздывания в текущий момент сравнения. Эта функция выполняется временным дискриминатором 21, на сигнальный вход которого поступает с выхода инвертора 20 отслеживаемый импульс.
В начальном положении АРЗ 1, например, на пусковой площадке, на интеграторе 22 выставляется оператором вручную или автоматически с ЦПУ 14 напряжение 




Разность

пропорциональна ошибке по дальности 





где



После подачи напряжения питания на блок 12 определения параметров движения в блоке 33 цифровой обработки сигналов (БЦОС) (см. фиг. 1,г) в соответствие с алгоритмом его работы вычислительное ядро центрального сигнального процессора (ЦСП) включает команду «Инициализация» [47], по которой производится настройка периферийных устройств ЦСП, распределение внутренней памяти, установка значений внутренних переменных, копирование исполняемого кода из низкопроизводительного ПЗУ в высокопроизводительное ОЗУ ЦСП и подача команды в его вычислительное ядро «Выборка из АЦП и сохранение результатов в памяти», по которой ЦСП блока 33 переходит в режим готовности приема оцифрованных сигналов от АЦП-1 и АЦП-2 с последующим формированием массива данных в памяти ОЗУ ЦСП.
Поступающие на второй вывод блока 12 от синтезатора 7 колебания пройдя через квадратурный фазовращатель 30, делятся поровну и поступают на смесители 28 и 29 в качестве гетеродинных сигналов с относительным сдвигом фаз на 
где


В результате нелинейного взаимодействия колебаний радиоимпульса (8) и гетеродинных колебаний (9) и (10) в смесителях 28 и 29 происходит преобразование радиосигналов ПЧ в область низких доплеровских частот. При этом на выходах 






где




Отметим, что (11) и (12), представляющие результат преобразования радиоимпульсов ПЧ в смесителях 28 и 29, содержат информацию о дальности до АРЗ и скорости его движения. При этом для реально существующих скоростей движения АРЗ справедливо условие, что за время 


С выходов смесителей 28 и 29 (см. фиг. 1,г) видеоимпульсы далее поступают соответственно на сигнальные входы АЦП 31 и АЦП 32, где по командам БЦОС 33 выполняется сначала операция дискретизации сигналов (11) и (12) по времени. При выполнении этой операции в АЦП 31 и АЦП 32 происходит выборка и запоминание мгновенных значений сигналов (11) и (12) в виде импульсов, амплитуда которых практически равна мгновенным значениям этих сигналов. Уровни импульсов далее в АЦП 31 и АЦП 32 преобразуются в цифровые значения, которые в виде параллельного кода поступают в ОЗУ ЦСП блока 33 в качестве массива данных, полученных для принятого сигнала от
где
Последовательности оцифрованных для каждого 





Полученные результаты расчетов согласно (15) в виде массива данных 

Далее в БЦОС 33 вычислительным ядром ЦСП к совокупности хранящихся в ОЗУ ЦСП значений амплитуд 









где 





По полученным результатам расчета согласно (18) значений отсчетов доплеровской частоты 


где

Зависимость отсчетов полной фазы 





где
К результатам вычисления отсчетов скорости 


В блоке 13 обработки данных полученных от блока 9 определения угловых координат, блока 10 определения метеоданных и блока 12 определения параметров движения в соответствие с заложенным в него принципом действия (см. стр. 82-84, [12]) выполняются следующие функции:
• управление приводом 4 антенны, работой импульсного передатчика 6 и приемного устройства 8 в режимах как ручного (по командам оператора ЦПУ 14), так и автоматического сопровождения АРЗ 1;
• измерение угловых координат АРЗ 1 (угол места и азимут);
• измерение наклонной дальности до АРЗ и скорости его перемещения;
• сбор метеоинформации по каналу телеметрии и ее первичную обработку;
• контроль функционирования и самопроверку системы с использованием эталонных тестовых сигналов при предстартовой подготовке и во время полета;
• прием команд и данных от ЦПУ 14 и передача на ЦПУ измеренных значений параметров АРЗ и системы, в целом, для дальнейшей обработки и принятия решения по управлению системой радиозондирования, а также окончательной обработкой метеорологической информации.
В результате выполнения всех перечисленных функций в блоке 13 формируется массив данных, который через шинный приемопередатчик БОД 13 передается в ЦПУ 14 для их окончательной обработки.
ЦПУ 14 (см. стр. 84-87, [12]) предназначен для ручного и автоматического управления узлами и блоками РЛС 2, окончательного сбора, обработки и отображения поступающей координатной и телеметрической информации с последующей выдачей аэрологических данных в виде телеграмм и передачей их по каналам связи.
В состав ЦПУ 14 входит управляющая ПЭВМ, принтер и источник бесперебойного питания (обеспечивает автономную работу РЛС 2 в течение двух часов). ПЭВМ, работающая под управлением специальной программы центрального пульта, выполняет следующие функции:
• контроль функционирования станции при включении и по команде оператора;
• предполетную проверку АРЗ;
• автоматическое и ручное наведение и сопровождение АРЗ, находящегося в свободном полете;
• определение и отображение относительных координат (азимута, угла места и наклонной дальности) и полетного времени АРЗ;
• обработку в реальном масштабе времени и отображение телеметрической информации от АРЗ о температуре, влажности и давлении в точке его нахождения;
• сохранение данных об относительных координатах АРЗ и параметрах телеметрической информации, привязанных к полетному времени, в виде файла - протокола на дисковых накопителях управляющей ПЭВМ;
• обработка аэрологических данных (программа обработки аэрологических данных, их визуализация и формирование телеграмм для выдачи по каналам связи разработана специалистами Центральной аэрологической обсерватории (Долгопрудный, МО) и включена в программное обеспечение ЦПУ 14).
Интерфейс оператора и инженера обеспечивает отображение на экране ПЭВМ необходимой информации и ввод в систему команд управления. Интерфейс обеспечивает работу пользователя на русском или английском языках, выбор которых задается при начальной настройке станции.
Особое оконное построение интерфейса обеспечивает наиболее удобное для пользователя размещение информации: группировку однородной информации в пределах одного окна, возможность переключения между окнами, возможность получения дополнительной информации в виде нового окна, возможность удаления с экрана ненужного окна.
Весь экран ЦПУ условно разделен на три зоны: зону диагностики и управления станцией в целом, зону отображения аэрологической информации и переключаемую зону управления подсистемами станции. В зоне диагностики и управления расположены индикаторы состояния подсистем, отражающие степень работоспособности станции. Там же расположены кнопки, задающие текущий режим работы РЛС: включение/выключение станции, контроль функционирования, подготовка полета или собственно полет радиозонда, а также кнопка настройки основных технических параметров станции. Все кнопки переключения режимов снабжены блокировкой, предотвращающей случайное изменение режима работы.
Зона отображения аэрологической информации предназначена для вывода всех текущих метеорологических параметров: дальности, высоты, азимута и угла места АРЗ относительно станции, измеренных радиозондом температуры и влажности, а также полетного времени АРЗ.
Зона управления подсистемами содержит в себе пять страниц, выбираемых с помощью соответствующих закладок: «Координаты», «Дальность», «Слежение», «Приемопередатчик» и «Телеграммы». Каждая из страниц содержит в себе сгруппированные индикаторы и органы управления, обеспечивающие отображение состояния и управление подсистемой измерения дальности, угловой следящей системой, приемопередающей системой и подсистемой выдачи аэрологических телеграмм. Вся информация на страницах сгруппирована так, что позволяет выполнять операции по управлению станцией с минимальным количеством переключений между страницами.
В заключение отметим, что по литературным данным (см. стр. 626-633, формулу 9.8.51, [63]) и результатам эксплуатации известных доплеровских систем (см. патенты US5055849 и US5317315) измерение радиальной скорости АРЗ и, соответственно, параметров ветра, по доплеровскому сдвигу частоты сигнала обеспечивает значительно бОльшую точность, чем используемый в отечественных системах радиозондирования атмосферы способ производной по дальности. При этом отмечается, что с увеличением маневренности перемещения АРЗ, например, в условиях турбулентности атмосферы выигрыш в точности доплеровского метода существенно возрастает. Кроме того, предлагаемый способ обеспечивает получение более точных данных о дальности до АРЗ и иных его параметрах движения, например, закона мгновенного перемещения АРЗ и направления его движения, что является важным для исследования тонкой структуры динамики ветра.
Таким образом, предлагаемое изобретение при сохранении функциональных возможностей известных аналогов и прототипа обеспечивает достижение его технического результата - повышение точности измерения скорости движения АРЗ и, соответственно, характеристик ветра. При этом необходимо отметить, что при использовании предлагаемого изобретения в существующих РЛС радиозондирования потребуются несущественные конструктивные изменения, связанные с введением формирователя задержки 18 в импульсном передатчике 6 и разработкой блока 11 выделения радиоимпульсов ПЧ и блока 12 определения параметров движения, а также программного обеспечения функционирования блоков 12, 13 и 14 цифровой обработки.
Литература:
1. Смирнов Г.Д., Горбачев В.П. Радиолокационные системы с активным ответом. - М.: Воениздат, 1962. 116 с.
2. Хахалин В.С. Современные радиозонды. - М.: Госэнергоиздат, 1959. 65 с.
3. Калиновский А.Б., Пинус Н.З. Аэрология. Часть 1. Методы аэрологических измерений. - Л.: ГИМИЗ, 1961. - 520 с.
4. Патент US5055849, опубл. 08.10.1991. МПК5 G01S13/58, G01W1/08. Method and device for measuring velocity of target by utilizing Doppler shift of electromagnetic radiation / Andersson et al.
5. Патент US5317315, опубл. 31.05.1994. МПК5 G01S13/536, G01S13/95. Method and device for measurement of the velocity of a moving target by making use of the Doppler shift of electromagnetic radiation / Andersson et al.
6. Авт. свид. SU115078, опубл. 01.01.1958. Передатчик-ответчик для радиозонда / В.С. Хахалин, Б.В. Васильев, С.Ф. Калачинский.
7. Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК-1. - М.: Гидрометеоиздат, 1989 г. - 148 с.
8. Патент RU2199764C1 от 27.02.2003. МПК7 G01S13/00, G01S13/95. Способ измерения координат аэрологического радиозонда (АРЗ) / В.Э. Иванов и др.
9. Патент RU2304290C2, опубл. 10.08.2007, бюл. №22. МПК (2006.01) G01S13/95. Способ определения дальности до аэрологического радиозонда / В.Э. Иванов.
10. Патент RU2368916C2, опубл. 27.09.2009, бюл. №27. МПК (2006.01) G01S13/74. Моноимпульсная система со сверхрегенеративным ответчиком / В.Э. Иванов.
11. Иванов В.Э., Гусев А.В., Игнатков К.А. и др. Современное состояние и перспективы развития систем радиозондирования атмосферы в России // Успехи современной радиоэлектроники. 2015. №9. С. 3-49.
12. Иванов В.Э., Фридзон М.Б., Ессяк С.П. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств / Под ред. В.Э. Иванова - Екатеринбург: УрО РАН, 2004. - 596 с.
13. Белкин М.К., Кравченко Г.И., Скоробутов Ю.Г., Стрюков Б.А. Сверхрегенераторы. - М.: Радио и связь, 1983, 248 с.
14. Патент RU2345379C1, опубл. 27.01.2009, бюл. №3. МПК (2006.01) G01S7/282. СВЧ-модуль сверхрегенеративного приемопередатчика радиозонда / В.Э. Иванов.
15. Патент RU2470323C1, опубл. 20.12.2012, бюл. №35. МПК (2006.01) G01S13/95. Способ регулировки выходных параметров сверхрегенеративного приемопередатчика радиозонда / В.Э. Иванов, С.И. Кудинов, А.В. Гусев.
16. Кудинов С.И., Иванов В.Э. Исследование влияния флуктуационных и ударных колебаний на чувствительность сверхрегенеративных приемопередающих устройств // Ural Radio Engineering Journal. 2019. Т. 3. №2. С. 170-194
17. Патент RU2172965C1, опубл. 27.08.2001, бюл. №24. МПК (2000.01) G01S13/74. Сверхрегенеративный приемопередатчик / В.Э. Иванов.
18. Кудинов С.И., Гусев А.В., Иванов В.Э. Исследование методов совмещения частот приёма и передачи в транзисторных сверхрегенеративных приёмопередатчиках радиозондов // 23-я Международная Крымская конференция «СВЧ-техника и телекоммуникационные технологии» (КрыМиКо’2015). Севастополь, 2013. С. 1026-1027.
19. Кудинов С.И. Транзисторные сверхрегенеративные приемопередающие устройства с повышенным потенциалом в системах радиолокации и связи / Диссертация к.т.н. - Екатеринбург: УГТУ-УПИ, 2007. - 158 с.
20. Патент RU2624993C1, опубл. 11.07.2017, бюл. №20. МКИ (2006.01) G01S13/74. Автодинный приёмопередатчик системы радиозондирования атмосферы / В.Я. Носков, В.Э. Иванов и др.
21. Патент RU2786415C1 опубл. 21.12.2022, бюл. №36. МКИ G01S13/74; G01S13/95. Автодинный асинхронный приемопередатчик системы радиозондирования атмосферы / В.Я. Носков, Р.Г. Галеев, Е.В. Богатырев, В.Э. Иванов, О.А. Черных.
22. Патент RU2786729C1, опубл. 26.12.2022, бюл. №36. МКИ G01S13/00. Способ и устройство синхронного приема и обработки запросного сигнала в автодинном приемопередатчике системы радиозондирования атмосферы / В.Я. Носков, Р.Г. Галеев, Е.В. Богатырев, В.Э. Иванов, О.А. Черных.
23. Патент RU2789416C1, опубл. 02.02.2023, бюл. №4. МПК G01S13/74; G01S13/95. Способ синхронного приема и обработки запросного сигнала в автодинном приемопередатчике системы радиозондирования атмосферы / В.Я. Носков, Р.Г. Галеев, Е.В. Богатырев, В.Э. Иванов, О.А. Черных.
24. Носков В.Я., Иванов В.Э., Гусев А.В. и др. Применение автодинов в перспективных системах радиолокационного зондирования атмосферы / Ural Radio Engineering Journal. 2022. Т. 6. №1. С. 11-53.
25. Теоретические основы радиолокации / под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970. - 560 с.
26. Патент RU37559U1, опубл. 27.04.2004, МПК G05F 1/00. Цифровая измерительная система импульсного дальномера / Иванов В.Э. и др.
27. Патент RU49368U1, опубл. 10.11.2005, бюл. 31, МПК(2000.01) H01Q 3/00. Аэрологический радиолокатор / Иванов В.Э.
28. Патент RU71777U1, опубл. 20.03.2008, бюл. №8, МПК(2006.01) G01S 7/00. Приемопередающая система аэрологического радиолокатора / Иванов В.Э., Кудинов С.И.
29. Патент RU2161847, опубл. 10.01.2001, МПК7 H01Q1/38. Антенная система метеолокатора / В.Э. Иванов, С.Н. Шабунин, С.Т. Князев.
30. Лебедев И.В. Техника и приборы СВЧ. М.: Высшая школа. 1970. 439 с.
31. Ivanov V.E., Kudinov S.I., Noskov V.Ya. L-band powerful pulse transmitter based on bipolar transistors // Telecommunication and Radio Engineering. 2016. V. 75, №9. P. 801-810.
32. Устройства генерирования и формирования радиосигналов / Под ред. Уткина Г.М., Кулешова В.Н., Благовещенского М.В. - М.: Радио и связь. 1994. - 416 с.
33. Шило В.Л. Популярные цифровые микросхемы: Справочник. - М.: Металлургия, 1988. - 321 с.
34. Ченакин А.В., Горевой А.В. Практическое построение синтезаторов частот СВЧ диапазона. - М.: Горячая линия - Телеком, 2021. - 280 с.
35. Радиоприёмные устройства / Под ред. А.П. Жуковского. М.: Высшая школа, 1989, 342 с.
36. Радиоприёмные устройства / Под ред. Н.Н. Фомина. М.: Радио и связь, 2003, 520 с.
37. Пушкарёва Е.Ю. Радиоавтоматика. - Серпухов: ФВА РВСН им. Петра Великого, 2018. - 279 с.
38. Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. - К.: Техника, 1983, 213 с.
39. Авт. свид. SU1236599A1, опубл. 07.06.1986, бюл. 21. МПК7 H03K5/13. Формирователь задержки импульсов / Кондратюк Н.Н.
40. Гольденберг Л.М. Импульсные устройства. - М.: Радио и связь, 1981. - 224 с.
41. Теоретические основы радиолокации / Под ред. В.Е. Дулевича. - М.: Советское радио, 1964. - 732 с.
42. Справочник по радиолокации. Том. 4. Радиолокационные станции и системы / Под ред. М. Сколника. - М.: Советское радио, 1978. - 376 с.
43. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. 416 с.
44. Карпов В.М., Малышев В.А., Перевощиков И.В. Широкополосные устройства СВЧ на элементах с сосредоточенными параметрами. - М.: Радио и связь, 1984. - 104 с.
45. Патент РФ RU187315U1, опубл. 01.03.2019, бюл. №7. МПК(2006) H01P 5/18. Компактный квадратурный направленный ответвитель / В.А. Чечеткин, Ю.Е. Мительман, Д.А. Летавин.
46. Грушвицкнй Р.И., Мурсаев А.X., Угрюмое Е.П. Проектирование систем на микросхемах программируемой логики. - СПб.: БХВ-Петербург, 2002. 606 с.
47. Руководство пользователя: Семейство микроконтроллеров MSP430X1XX. Пер. с англ. - М.: Изд. ЗАО Компэл, 2004. - 368 с.
48. Кузьменко Н.Г. Микропроцессорные системы. Часть 1. Микропроцессоры INTEL 8080-80286. - Красноярск: ИПЦ КГТУ, 2005 - 280 с.
49. Патент RU2529177C1, опубл. 27.09.2014, бюл. №27. МПК (2006.01) G01S13/95. Система радиозондирования атмосферы с пакетной передачей метеорологической информации / В.Э. Иванов, А.В. Гусев, О.В. Плохих.
50. Патент RU2214614C2, опубл. 20.10.2003, МПК7 G01S7/00. Приемопередающая система аэрологического радиозонда и ее конструктив / В.Э. Иванов.
51. Баранов А.В., Кревский М.А. Транзисторные генераторы гармонических СВЧ колебаний. - М.: Горячая линия - Телеком, 2021. - 276 с.
52. Носков В.Я., Смольский С.М., Игнатков К.А. и др. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов // Успехи современной радиоэлектроники. 2019. №2. С. 5-33.
53. Костылев С.А., Гончаров В.В., Соколовский И.И., Челядин А.В. Полупроводники с объемной отрицательной проводимостью в СВЧ полях: Электронные процессы и функциональные возможности. - Киев: Наук. думка, 1987. - 144 с.
54. Патент RU2295911C1, опубл. 27.03.2007, бюл. №9, МПК (2006.01) A61B5/05. Способ дистанционного контроля физиологических параметров жизнедеятельности организма / Д.А. Усанов и др.
55. Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов. - М.: Радио и связь, 1991. - 376 с.
56. Ерофеев Ю.Н. Импульсные устройства. - М.: Высшая школа, 1989, 589 с.
57. Демьянченко А.Г. Синхронизация генераторов гармонических колебаний. - М.: Энергия, 1976. - 240 с.
58. Полупроводниковые приборы в схемах СВЧ / Под ред. М. Хауса, Д. Моргана. - М.: Мир, 1979. - 443 с.
59. Курокава К. Принудительная синхронизация твердотельных СВЧ-генераторов // ТИИЭР, 1973, т.61, №10, стр. 12-40.
60. Радиотехнические устройства СВЧ на синхронизированных генераторах / Под ред. Н.Н. Фомина. - М.: Радио и связь, 1991. - 192 с.
61. Cam Nguyen, Seoktae Kim. Theory, Analysis and Design of RF Interferometric Sensors. Springer New York. NY. Dordrecht Heidelberg London, 2012. - 74 p. https://doi.org/10.1007/978-1-4614-2023-1
62. Frank Schadt, Friedemann Mohr, Markus Holzer. Application of Kalman Filters as a Tool for Phase and Frequency Demodulation of IQ Signals. International Conference on «Computational Technologies in Electrical and Electronics Engineering» (IEEE REGION 8 SIBIRCON). Novosibirsk Scientific Centre, Novosibirsk, Russia. July 21-25, 2008. P. 421-424.
63. Вопросы статистической теории радиолокации. Том 2 / Под ред. Г.П. Тартаковского. - М.: Советское радио, 1964. - 1081 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| АВТОДИННЫЙ АСИНХРОННЫЙ ПРИЕМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786415C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
Изобретение относится к радиолокации с активным ответом и может быть использовано в системах радиозондирования атмосферы для измерения наклонной дальности от РЛС до аэрологического радиозонда (АРЗ) импульсным методом, определения параметров движения АРЗ (скорости, закона и направления движения) доплеровским методом, пеленгации его по угловым координатам, а также передачи телеметрической информации о состоянии атмосферы на РЛС. Техническим результатом является повышение точности определения параметров движения АРЗ. Заявленный способ доплеровского определения параметров движения АРЗ включает формирование в передающем устройстве РЛС запросного радиоимпульса, состоящего из двух примыкающих друг к другу частей. Первую часть запросного радиоимпульса заполняют немодулированными когерентными колебаниями, а вторую - колебаниями с внутриимпульсной гармонической частотной модуляцией (ЧМ). В качестве приемоответчика на борту АРЗ используется автодинный приемопередатчик (АПП), содержащий последовательно соединенные антенну АРЗ, автодинный генератор, выполненный с возможностью электрического управления частотой, блок регистрации автодинного сигнала, резонансный усилитель, полосовой фильтр, амплитудный детектор, компаратор, временной селектор импульсов и формирователь импульсов ответной паузы. АПП работает в режиме захвата частоты автодинного генератора, когда частота передатчика РЛС совпадает с частотой автодинного генератора. Ответный радиосигнал АРЗ представляет собой совокупность практически непрерывного колебания с узкополосной ЧМ, предназначенной для передачи телеметрических данных в режиме пакетной связи, периодических ответных радиоимпульсов АРЗ и следующих за ними ответных пауз в виде кратковременного прерывания сигнала. При этом первая часть ответного радиоимпульса, несущая в себе реакцию автодинного генератора на синхронное воздействие запросного радиоимпульса в виде постоянного фазового сдвига колебаний, обеспечивает их когерентность и формирование в приемном устройстве РЛС доплеровского сигнала. 2 н. и 7 з.п. ф-лы, 6 ил.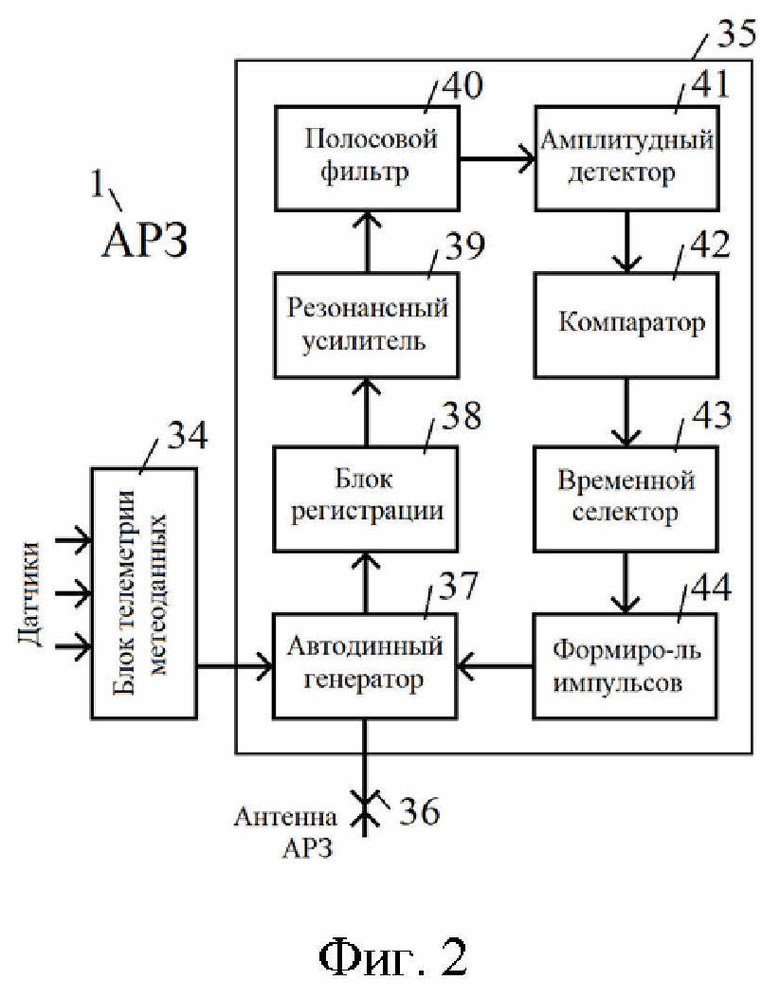
1. Способ доплеровского определения параметров движения аэрологического радиозонда (АРЗ), включающий формирование в передающем устройстве радиолокационной станции (РЛС) запросного радиоимпульса, который передают по радиоканалу на борт АРЗ, воздействуют им на автодинный генератор, вызывая захват и синхронизацию частоты его колебаний, а также автодинные изменения амплитуды колебаний, средних значений тока и/или напряжения в цепи смещения активного элемента автодинного генератора, выделяют запросный радиоимпульс и последовательно усиливают его по амплитуде, фильтруют и преобразуют в импульс огибающей, далее сравнивают амплитуду импульса огибающей с пороговым уровнем и при превышении амплитудой импульса огибающей порогового уровня формируют импульс огибающей, затем формируют импульс ответной паузы, которым прерывают излучение автодинного генератора, сформированные при этом в автодинном генераторе возмущенные колебания, вызванные воздействием запросного радиоимпульса, и ответную паузу АРЗ передают по радиоканалу на РЛС, где в приемном устройстве принятые радиосигналы усиливают и нормируют по амплитуде, переносят на промежуточную частоту, отличающийся тем, что в передающем устройстве РЛС запросный радиоимпульс формируют из двух примыкающих друг к другу частей, первую часть которого заполняют немодулированными когерентными колебаниями несущей частоты, а вторую часть радиоимпульса заполняют несущими колебаниями с внутриимпульсной гармонической частотной модуляцией (ЧМ), на борту АРЗ захват и синхронизацию частоты колебаний автодинного генератора вызывают во время действия первой части запросного радиоимпульса, а во время второй части запросного радиоимпульса вызывают автодинные изменения амплитуды колебаний, средних значений тока и/или напряжения в цепи смещения активного элемента с внутриимпульсной гармонической ЧМ, при этом указанные изменения выделяют на частоте внутриимпульсной ЧМ запросного радиоимпульса, причем продолжительность импульса, сформированного из огибающей амплитуды радиоимпульса на частоте внутриимпульсной ЧМ, сравнивают с заданной продолжительностью второй части запросного радиоимпульса, а в радиоприемном устройстве РЛС из принятого и перенесенного на промежуточную частоту радиосигнала АРЗ выделяют радиоимпульс, соответствующий первой части запросного радиоимпульса, разделяют его на два квадратурных канала, смешивают с гетеродинными колебаниями и преобразуют в область низких доплеровских частот, получая квадратурные видеоимпульсы каналов 








далее по полученным отсчетам значений 





где 








где 


где 






2. Способ по п. 1, отличающийся тем, что результаты отсчетов скорости
3. Способ по п. 1, отличающийся тем, что результаты отсчетов скорости
4. Способ по пп. 1, 2 и 3, отличающийся тем, что частоту автодинного генератора в промежутках времени между моментами приема запросных сигналов и формирования ответной паузы модулируют сигналом радиотелеметрии.
5. Способ по пп. 1-3 и 4, отличающийся тем, что среднюю частоту модулированных колебаний автодинного генератора предварительно совмещают с частотой несущей запросного радиосигнала.
6. Способ по пп. 1-4 и 5, отличающийся тем, что девиацию частоты запросного сигнала ограничивают условием ее нахождения внутри полосы синхронизации автодинного генератора.
7. Радиолокационная система зондирования атмосферы, реализующая способ по п. 1, содержащая связанные между собой через канал радиосвязи аэрологический радиозонд – АРЗ и наземную базовую станцию – РЛС, причем РЛС содержит антенну РЛС, антенный привод, циркулятор, импульсный передатчик, синтезатор частоты, приемное устройство, блок определения угловых координат, блок определения метеоданных, блок обработки данных (БОД) управления и синхронизации, а также центральный пульт управления (ЦПУ) и отображения, при этом антенна РЛС механически связана с антенным приводом, а электрически – через циркулятор с выходом передатчика и с входом приемника, причем передатчик и приемник связаны с синтезатором частоты, при этом передатчик выполнен с возможностью частотной модуляции несущей, к входу управления частотой которого подключен генератор гармонической модуляции, выход приемника связан с блоками определения угловых координат и метеоданных, которые, в свою очередь, связаны с входами БОД, выходы которого соединены с ЦПУ, кроме того, антенный привод связан с блоком определения угловых координат, БОД и ЦПУ своими управляющими сигналами связаны с антенным приводом, импульсным передатчиком, приемным устройством, блоками определения угловых координат, метеоданных, причем АРЗ содержит блок телеметрии метеоданных и автодинный приемопередатчик (АПП), при этом АПП состоит из последовательно соединенных антенны АРЗ, автодинного генератора, выполненного с возможностью электрического управления частотой, блока регистрации автодинного сигнала, резонансного усилителя, полосового фильтра, амплитудного детектора, компаратора, временного селектора импульсов и формирователя импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора, при этом выход блока телеметрии метеоданных подключен к входу управления частотой автодинного генератора, причем АПП работает в режиме захвата частоты автодинного генератора, когда частота передатчика РЛС совпадает с частотой автодинного генератора, отличающаяся тем, что в импульсный передатчик, выполненный с возможностью ЧМ несущей, между генератором гармонической модуляции и входом запуска включен формирователь задержки фронта импульса запуска, а между выходом приемного устройства и входом БОД дополнительно введено последовательное соединение блока выделения радиоимпульса промежуточной частоты (БВРПЧ) и блока определения параметров движения (БОПД).
8. Система по п. 7, отличающаяся тем, что БВРПЧ содержит последовательно соединенные детектор огибающей, инвертор, временной дискриминатор, фильтр нижних частот (ФНЧ), формирователь переменной задержки, первый формирователь полуширины запросного импульса (ФПЗИ-1), второй формирователь полуширины запросного импульса (ФПЗИ-2), формирователь пары примыкающих импульсов, выходы которого подключены к входам управления временного дискриминатора, при этом выход ФПЗИ-1 дополнительно подключен к входу управления селектора радиоимпульса промежуточной частоты (ПЧ), включенного между входом БВРПЧ и его выходом.
9. Система по п. 7, отличающаяся тем, что БОПД содержит первый и второй смесители квадратурных каналов
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА (АРЗ) | 2001 |
|
RU2199764C1 |
| СПОСОБ РЕГУЛИРОВКИ ВЫХОДНЫХ ПАРАМЕТРОВ СВЕРХРЕГЕНЕРАТИВНОГО ПРИЕМОПЕРЕДАТЧИКА РАДИОЗОНДА | 2011 |
|
RU2470323C1 |
| НОСКОВ В.Я., ИВАНОВ В.Э., ГУСЕВ А.В., ИГНАТКОВ К.А., КНЯЗЕВ С.Т., КУДИНОВ С.И., МАЛЫГИН И.В., ПЛОХИХ О.В., ПОНОМАРЕВ О.П., ЧЕРНЫХ О.А | |||
| Применение автодинов в перспективных системах радиолокационного зондирования | |||

