Предлагаемые изобретения относятся к области техники автоматического управления и регулирования и касаются нелинейных нестационарных систем стабилизации неустойчивых или склонных к неустойчивости объектов управления. Например, самолетов вертикального взлета и посадки (СВВП), стабилизирующих гироскопов и гироскопических систем, испытывающих значительные полетные ударные, вибрационные и другие непредвиденные вероятностные внешние воздействия. Они могут быть использованы, например, для стабилизации и повышения устойчивости СВВП в режимах взлета, посадки и полета на малых скоростях, для стабилизации систем прицеливания и ведения огня на кораблях ВМФ, для стабилизации поля зрения оптико-электронных следящих координаторов (ОЭСК) оптических головок самонаведения (ОГС) и т.д. Заявленные изобретения также могут быть полезны при проектировании пилотируемых СВВП с шестью степенями свободы интегральных симметричных аэродинамических форм в виде плоского эллипсоида, летающего крыла (так называемых в патентах США «летающих тарелок»), диска для демпфирования и обеспечения устойчивости их угловой ориентации и пространственного движения.
Одной из задач при проектировании любого летательного аппарата (ЛА) и разработке его систем стабилизации и управления является обеспечение оптимального сочетания устойчивости и управляемости во всем диапазоне требований технического задания (ТЗ). Для самолета критическими режимами, когда запас устойчивости минимален, являются взлет, посадка, набор высоты с превышением угла атаки и соответственно тангажа. Для СВВП это режимы ВВП и набора скорости, когда аэродинамические силы и моменты еще недостаточны для стабилизации и управления горизонтальными, вертикальными рулями и элеронами. А жидкостные ракеты склонны к колебаниям и потере угловой ориентации, так как плескания и колебания топлива и окислителя вызывают переменную асимметрию и непредвиденные также колебательные смещения центра масс и эти переменные параметры трудно отработать системе угловой стабилизации. Этот фактор имеет место и для самолетов. Принятое понятие устойчивости движения самолета (1) (А также памяти всех разработчиков КЕМ и ЛОМО, создавших уникальные ракетные комплексы и ушедших из жизни, Владимира Васильевича Боидаремко, автора 240 изобретений, Сергея Ивановича Быковского, автора 104 изобретений и многих других, забытых неблагодарными потомками) означает его возвращение на свою траекторию при внешних и внутренних возмущениях. А для СВВП, как и для ракеты, в режимах взлета, посадки и набора скорости - сохранение заданной пространственной ориентации. Отметим, что управляемость, наоборот, означает изменение скорости, высоты, траектории, что вызывает необходимость соответствующих изменений ориентации, то есть угловых положений самолета по крену, курсу и тангажу. Отсюда мы видим, что понятия устойчивости и управляемости противоречивы и речь можно вести только об оптимальном сочетании управляемости при достаточном запасе устойчивости ориентированного движения (1, 2, 3, 4, 5, 6, 7).
Принимая во внимание вышеизложенное, более разумным и правильным будет понимание устойчивости летательных аппаратов (ЛА) как надежное выполнение старта, взлета, зависания, набора скорости, маневрирования, снижения, посадки и других заданных эксплуатационных режимов при одновременной работе в штатных режимах систем стабилизации и управления, которые должны надежно парировать все самые неблагоприятные сочетания внутренних и внешних возмущающих воздействий без перехода в режим автоколебаний или срыва регулирования полета при заданной ориентации в пространстве (формулировка моя - авт.).
Ярким примером слабодемпфированного склонного к неустойчивости объекта управления, задача надежной стабилизации которого до сих пор полностью не решена, является СВВП. Как объект управления СВВП не имеет достаточного демпфирования, но зато имеет множество переменных параметров, которые зависят от времени, расхода топлива, боеприпасов и т.д. К переменным параметрам СВВП можно отнести его массу, расположение центра масс, моменты инерции по осям крена, курса и тангажа. Плескание керосина в топливных баках СВВП может вызвать соответствующие колебания центра масс и моментов инерции. Наряду с переменными параметрами стабилизацию и управление СВВП могут осложнить и непредвиденные сочетания внутренних и внешних возмущений, таких как сильные порывы ветра, качка и другие неблагоприятные погодные и атмосферные явления. Если при наборе скорости СВВП, как и обычный самолет, стабилизируется и управляется за счет аэродинамических сил и моментов, формируемых хвостовым оперением, горизонтальными, вертикальными рулями и элеронами, то в режимах ВВП, зависания и набора скорости, посадки он становится неустойчиым.
Таким образом, стабилизация СВВП и других такого рода неустойчивых и слабодемпфированных объектов управления представляет собой сложную задачу. До сего времени ее пытались решить путем точного управления вектором тяги подъемно-маршевых двигателей («Харриер») и/или дополнительной коррекцией ориентации самолета посредством формирования газодинамических моментов сил с помощью 4-струйных рулей, установленных в носовой, хвостовой частях самолета и на крыльях (ЯК-36, ЯК-38, ЯК-41) (см. 8, 9). Но такие системы автоматического управления (САУ) вектором тяги и струйными рулями могут, например, успешно справиться на взлете, но при посадке, когда параметры самолета сильно изменились, и погода также изменилась, в них могут возникнуть неустранимые автоколебания, что может привести к аварии или катастрофе. Задача устранения таких колебаний, как это известно из теории систем автоматического управления, решается сейчас введением быстродействующей самонастройки параметров, скользящего режима работы САУ или введением в контур управления нелинейных корректирующих устройств. Все эти известные способы значительно усложняют САУ, но при этом не дают полноценного результата, так как сам объект управления остается слабодемпфированным. При неблагоприятных сочетаниях меняющихся параметров СВВП и внешних возмущений, все которые трудно учесть, САУ остается предрасположенной к автоколебаниям. Многочисленные аварии и катастрофы в практике эксплуатации самолетов «Харриер», «ЯК-36», «ЯК-38» подтверждают это. Например, из вступивших в строй в 1969-1980 годах 241 «Харриера» за этот период с ними произошли 83 катастрофы, при этом погибли 25 пилотов. Не лучшим образом выглядит статистика аварий и катастроф и с отечественными СВВП.
Широко известен способ стабилизации, управления, то есть полета самолета обычного традиционного функционирования, использующего для взлета длинный или короткий разбег, заключающийся в формировании аэродинамических моментов сил, удерживающих самолет на траектории полета вблизи желаемой ориентации (см. 10). По известному способу полета самолет стабилизируется аэродинамическими силами хвостового оперения, управляется по курсу и тангажу горизонтальными и вертикальными рулями, а по крену элеронами. Известный способ эффективен только после набора самолетом взлетной или критической скорости, при которой формируется подъемная сила, равная взлетному весу, а аэродинамические стабилизирующие силы и моменты уже способны, но еще имеют недостаточный запас устойчивости для надежного удержания самолета на траектории взлета и тем более на глиссаде посадки. (11). Статистика авиапроисшествий и катастроф наглядно демонстрирует, что большинство из них происходят именно на взлете и посадке.
Выше показано (см. лист 2), что все известные близкие по назначению способы и устройства стабилизации недостаточно эффективны в опасных режимах взлета, посадки даже для известных самолетов традиционных схем, тем более для СВВП. Дополнительную опасность создают неблагоприятные внешние возмущения.
Теперь рассмотрим некоторые аспекты теории твердотельных гироскопов (ТГ), стабилизирующих гироскопических устройств и систем, так как далее на их основе будут описаны близкие по технической сущности способы стабилизации объектов управления. Теория ТГ подробно разработана и описана в трудах отечественных и зарубежных авторов (см., например, 12, 13, 14). Гироскопические устройства и системы стабилизации на основе ТГ находят широкое применение в гражданской и военной технике. Они используются, например, в качестве измерительных преобразователей физических величин в электрические сигналы (датчиков) углов, угловых скоростей и ускорений, интегрирующих ускорения для вычисления пути гироскопов, гирокомпасов, гиростабилизаторов, гировертикалей, а астатический трехстепенной гироскоп на внутреннем кардановом подвесе с управляемым прецессионным движением широко используется для стабилизации поля зрения оптико-электронных следящих координаторов (ОЭСК) оптико-электронных следящих систем (ОЭСС) оптических головок самонаведения (ОГС) одноканальных вращающихся зенитных управляемых ракет (ВЗУР) типа «Стингер», »Стрела», "Игла", "Мистраль" и других.
Несмотря на свои замечательные свойства, основное из которых состоит в сохранении направления оси вращения в инерциальном пространстве, ТГ имеют ряд недостатков, если они предназначены для применения в авиации, реактивных снарядах и ракетах. ТГ весьма чувствительны к внешним ударным воздействиям и полетным вибрациям, они имеют свойство терять устойчивость, что приводит к нутационным колебаниям оси вращения за счет передачи внешних моментов сил в подвесе. Для достижения точности ТГ требуют соответствующих стабильных размеров вращающегося твердого тела и других элементов гироскопа. Реализовать все это в высшей степени затруднительно, так как существуют упругие, температурные и другие деформации. К потере устойчивости ТГ также могут привести резонансы составных частей гироскопа с модами полигармонических полетных вибраций и перегрузки стартовых и полетных ударных воздействий, которые на ракетах могут достигать больших значений из-за неравномерного горения топлива и других причин. Самые большие перегрузки должны выдерживать системы вращающихся управляемых артиллерийских снарядов (ВУАС). При выстреле из пушки их гироскоп подвергается ударной перегрузке до 10000-20000 g.
Поэтому на ТГ военного назначения для повышения устойчивости к внешним ударным и вибрационным воздействиям устанавливают жидковязкостные или жидкометаллические гасители нутационных колебаний, то есть демпферы. Один из вариантов такого демпфера, который устанавливают на 3-степенный гироскоп ВЗУР «Стрела», «Игла», выполняют в виде кольца, заполненного ртутью, которое устанавливают для получения максимального коэффициента демпфирования не на сам ротор гироскопа, а на выносную бленду оптической системы, совмещенной с ротором гироскопа для гиростабилизации поля зрения. Так как полноценной теории и рекомендаций принципа гашения нутаций не создано до сих пор, инженеры практики вынуждены подбирать варианты конструкции и углы заливки опытным путем на настоящем "живом " гироскопе, подвергая его реальным полетным воздействиям и оценивая их результаты для получения максимально возможного коэффициента демпфирования. Предположительно считается, что вращающаяся жидкость или жидкий металл гасят нутационные колебания за счет рассеивания механической энергии внешних воздействий внутренним трением в жидкости и перехода ее в тепло. Соглашаясь с этой гипотезой, отмечу, что вероятно немалую роль в гашении нутаций играют и обратные процессы возбуждения внешними воздействиями от ударов и вибраций во вращающейся жидкости нелинейных резонансных колебаний и «накачкой» их механической энергией внешних воздействий с последующим ее рассеиванием.
В отличие от широко известных ТГ, менее известны, но более близки по технической сущности жидкостные гироскопы (ЖГ) с жидким ротором (15). Это перспективное направление гироскопии и первые практические разработки ЖГ появились в 50-е годы в период послевоенного взлета авиационной, ракетной и космической науки и техники в СССР, когда в отличие от «рыночной» науки, техники и «экономики» существовала и поощрялась реальная конкуренция изобретательских идей и технических решений (TP). Прежде всего, интерес к к ЖГ был обусловлен тем, что они в отличие от ТГ обладают большей ударной прочностью, вибропрочностью и виброустойчивостью, выдерживают много большие перегрузки. ЖГ применяли на ракетах в качестве чувствительных элементов (датчиков) (15), но они не получили дальнейшего развития по всем направлениям гироскопии, как это произошло с ТГ. Однако сама природа показывает нам образцы ЖГ, например наша Земля имеет жидкометаллическое ядро и жидкую мантию, вращается с очень малой угловой скоростью 15,04107° в час и миллиарды лет сохраняет ось вращения в инерциальном пространстве. Это говорит о том, что общепринятое определение ТГ как быстро вращающееся твердое тело неверно, имеет значение не сама угловая скорость вращения тела, а кинетический момент вращения, который должен на порядки превосходить все внешние силы и моменты, тогда и медленно вращающееся тело приобретает свойства гироскопа как самостоятельная система отсчета в пространстве.
Известны близкие по технической сущности способ и устройство гиростабилизации поля зрения ОЭСК. ОЭСС и ОГС. Известный способ состоит в совмещении оптической системы и ротора-магнита астатического 3-степенного гироскопа, разгоне ротора и управлении его прецессионным движением с помощью сферического соленоида, на который подают гармонический токовый сигнал частоты вращения ротора. При этом согласно теории гироскопов угловая скорость прецессии пропорциональна току сигнала управления и обратно пропорциональна частоте вращения ротора, а направление прецессии происходит под углом 90 и задается фазой сигнала управления. Близкое по технической сущности устройство (16) содержит подвешенный на внутреннем кардановом подвесе радиально намагниченный ротор-магнит, совмещенный с оптической системой ОЭСК, внешнее и/или внутреннее разгонное устройство ротора-магнита, обмотку управления прецессионным движением ротора-магнита, выполненную в форм е сферического соленоида, которая в режиме прицеливания подключена на выход системы электрического арретирования, а после захвата цели в поле зрения ОЭСК в режиме автосопровождения на выход ОЭСС. На бленде оптической системы, совмещенной с ротором, установлено заполненное ртутью кольцо (демпфер), который предназначен для гашения нутационных колебаний ротора от ударного воздействия вышибного заряда при старте и вибрационных воздействий полетных вибраций. Достоинством близких по технической сущности способа и устройства является надежная гиростабилизация поля зрения ОЭСК ВЗУР и обеспечение работоспособности ОГС при ударных и вибрационных ускорениях до 20÷30 g без потери цели. Однако известные способ и устройство гиростабилизируют поле зрения объекта ВЗУР с 5-ю степенями свободы пространственного движения и не могут быть использованы для стабилизации объектов управления с 6-ю степенями свободы, например СВВП.
Наиболее близкими по технической сущности TP способа и устройства стабилизации объекта является TP ЛАВВП (17). TP наиболее близкого известного способа состоит в том, что формируют гиростабилизирующий кинетический момент закруткой корпуса ЛАВВП вокруг оси курса на старте, а задание ориентации оси вращения в пространстве производят путем формирования управляющей аэродинамической силы одноканальным управлением посредством переключения закладки расположенных по периметру рулей со сменой знака угла атаки синхронно по частоте и фазе вращения ЛАВВП. Наиболее близкое устройство содержит выполненный в виде плоского эллипсоида вращения корпус с 5-ю степенями свободы, стабилизированный вращением вокруг оси курса, одноканальную систему управления ориентацией и движением ЛА в режиме вращения, выходом подключенную к приводам рулей, крылья, аксиально расположенный турбореактивный двигатель (ТРД), на сопло которого установлена многозаходная спиральная газодинамическая насадка.
К достоинствам наиболее близких по технической сущности способа и устройства относятся простота, стабилизация ЛА без затрат технических средств, естественным путем придания вращения корпусу. Недостатками являются ограниченные функциональные возможности и области применения только для беспилотных ЛА с 5-ю степенями свободы, принципиальная невозможность стабилизации объектов управления с 6-ю степенями свободы пространственного движения, то есть пилотируемых ЛА, например СВВП.
Целью заявленных способа и устройства является повышение устойчивости слабодемпфированных неустойчивых или склонных к неустойчивости объектов управления с шестью степенями свободы в неблагоприятных эксплуатационных режимах и при наличии неблагоприятных внешних воздействий.
Указанная цель в способе, основанном на гиростабилизации объекта управления путем формирования кинетического момента вращения и управлении пространственной ориентацией оси вращения посредством формирования аэродинамических моментов сил, достигается тем, что гироскопический стабилизирующий момент формируют не закруткой и приданием вращения самому объекту как в TP прототипа, а путем закрутки жидкости или жидкого металла вокруг центра масс аппарата по тороидальному кольцу, расположенному внутри аппарата, жестко или полужестко через амортизаторы закрепленного с его корпусом, а управление угловой ориентацией объекта производят путем формирования не аэродинамических моментов сил, как в TP прототипа, а 2-х ортогональных моментов газодинамических сил. Закрутку жидкости производят, например, с помощью одного или более циркуляционных насосов. Жидкий металл возможно закручивать формированием вихревых токов с помощью вращающегося магнитного поля или таким же образом с помощью циркуляционных насосов.
Указанная цель в устройстве, содержащем газодинамические элементы закрутки и поддержания режима вращения объекта, систему управления ориентацией оси вращения объекта, достигается тем, что внутри объекта вокруг его центра масс устанавливается жестко или полужестко закрепленное с корпусом аппарата тороидальное кольцо, заполненное жидкостью или жидким металлом, внутри или вне кольца устанавливается разгонное устройство, например один или более циркуляционных насоса, которые снабжают гидродинамическими насадками, а в качестве исполнительных элементов системы управления ориентацией объекта устанавливаются под углом 90 между собой две пары газодинамических рулей, которые подключены на выходы релейных руль-машинок, а входы руль-машинок соединены с выходами системы управления ориентацией объекта.
Новизна заявленных способа и устройства состоит во введении нового, неизвестного ранее принципа стабилизации и повышения устойчивости объекта с 6-ю степенями свободы закруткой и приданием вращения не самому объекту, а жидкости или жидкому металлу по тороидальному кольцу. При этом сам объект сохраняет все 6 степеней свободы, что обеспечивает возможность стабилизации и демпфирования пилотируемых ЛА, например СВВП. Назовем такое устройство стабилизации силовым жидкостным гироскопом (ЖГ). Такой подход обладает полной новизной, так как неизвестен на современном уровне развития областей гироскопии и гироскопических стабилизаторов. До сих пор известно применение ЖГ с жидким ротором только в качестве чувствительных элементов (датчиков), способных выдерживать большие полетные перегрузки, и в качестве демпферов для гашения нутационных колебаний твердотельных гироскопов (ТГ). Между тем, поток вращающейся жидкости и жидкого металла, также как и вращающееся твердое тело, обладает запасом количества движения и энергии. Этот неоспоримый физический факт возможно и разумно использовать не только в гидротурбинах, где энергия движущейся жидкости используется для выработки электроэнергии, но и для создания новой разновидности ЖГ для силовой гиростабилизации и одновременного демпфирования неустойчивых, слабодемпфированных объектов управления с 6-ю степенями свободы. Как известно из геометрической топологии, занимающейся изучением свойств пространства, его связности, тор есть фигура отличная от шара, фигура второго рода, которая имеет ось симметрии, вращением вокруг которой образуется тор, и собственную замкнутую ось. Закручивая жидкость вокруг первой оси мы формируем стабилизирующий эффект по осям тангажа и крена. Закручивая жидкость вокруг второй оси, насколько это возможно ввиду воздействия центробежных сил, мы формируем стабилизирующий момент вокруг оси курса, хотя он будет значительно меньшего порядка. Таким образом, благодаря использованию вместо твердого тела жидкой среды, мы обеспечиваем стабилизацию с помощью одного ЖГ по двум и даже трем осям (при использовании еще более особенным по связности топологических фигур, но это тема другой заявки). Выше показано, что заявленные TP способа и устройства не вытекают очевидным образом из современного уровня областей техники гироскопии, автоматического управления, теории устойчивости, то есть, они имеют изобретательский уровень.
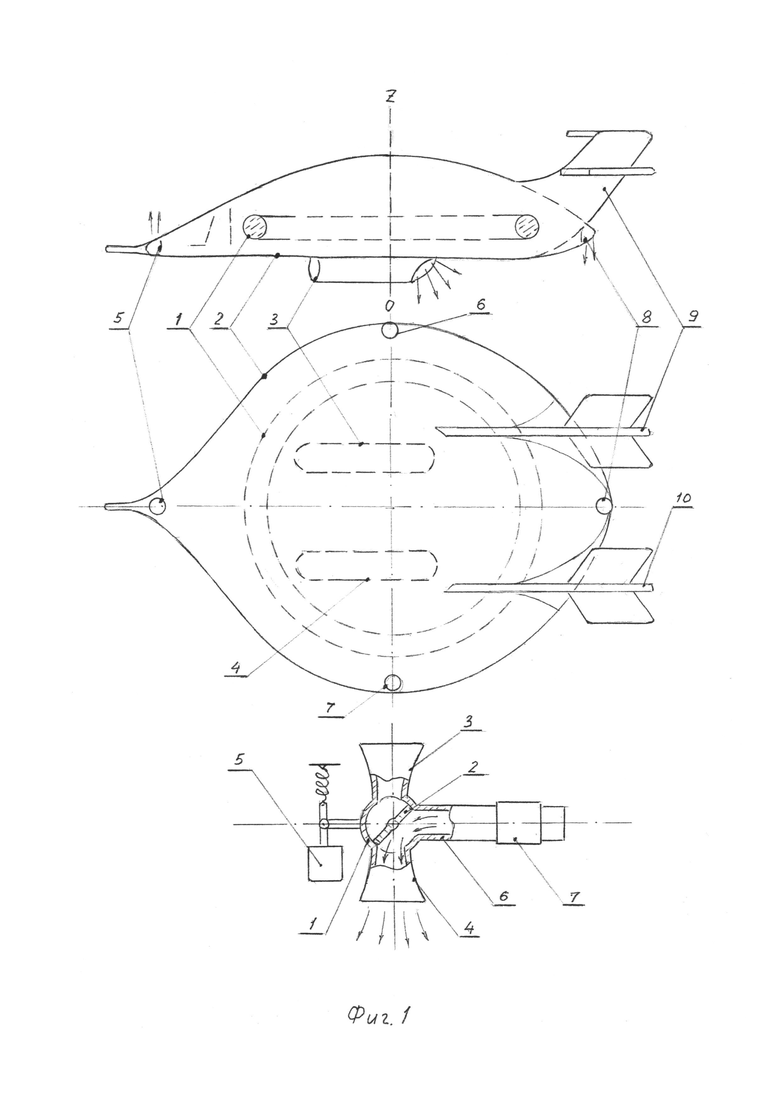
На Фиг.1 изображен вариант устройства для осуществления способа применительно к СВВП, как типичному слабодемпфированному, склонному к неустойчивости объекту управления с 6-ю степенями свободы. На Фиг.1 представлены две проекции СВВП, выполненного по интегральной схеме, в виде плоской фигуры вращения, и эскиз реверсивной газодинамической руль-машинки.
На проекциях СВВП обозначены: силовой ЖГ 1; корпус СВВП 2; подъемно-маршевые двигатели 3, 4; газодинамические руль-машинки 5, 6, 7, 8; хвостовое оперение 9,10.
На эскизе руль-машинки (РМ) обозначены: шаровая полость 1; заслонка 2 переключения направления вектора тяги РМ; верхнее и нижнее сопло 3, 4 РМ; электромагнит 5 переключения заслонки; трубопровод 6; электроклапан 7 подачи газа.
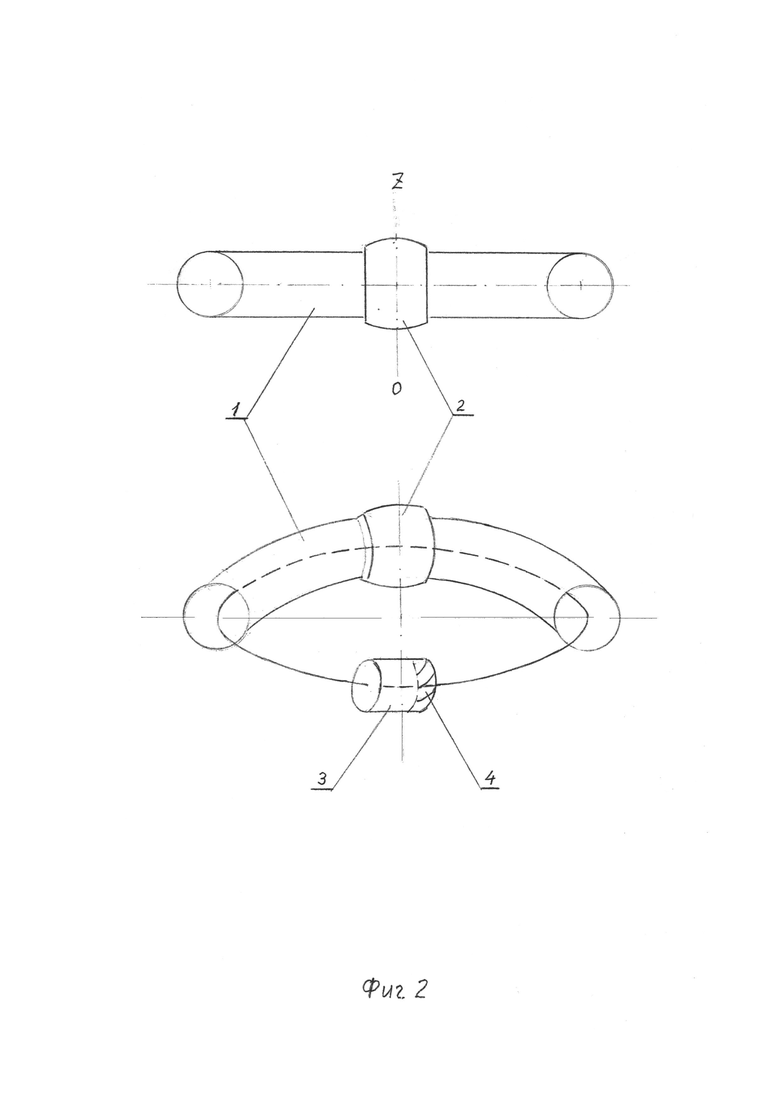
На Фиг.2 изображен силовой ЖГ в разрезе, где показаны: тороидальное кольцо 1; циркуляционные насосы 2, 3; гидродинамическая насадка 4 (ГДН).
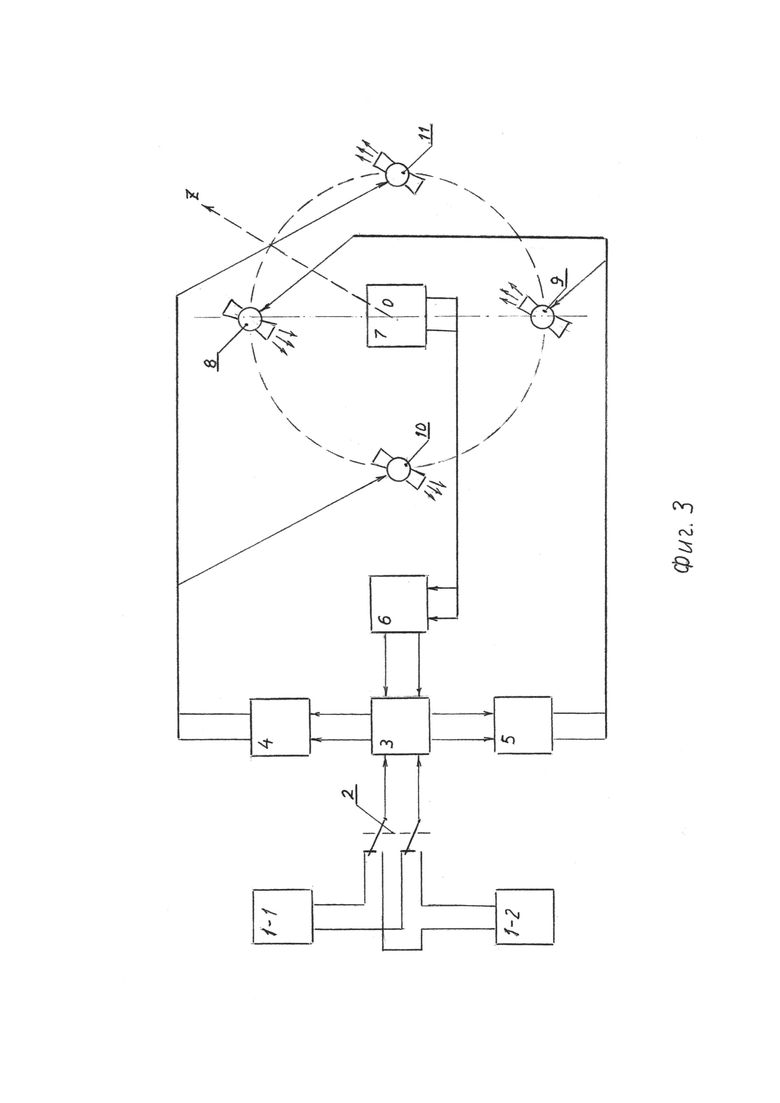
На Фиг.3 изображена укрупненная функциональная схема управления пространственной ориентацией СВВП, где показаны: задатчик 1-1 углов крена и тангажа для режимов взлета, посадки и зависания ручного плотирования; задатчик 1-2 углов автоматического режима взлета, посадки и зависания; переключатель 2 ручного и автоматического режима пилотирования; схема сравнения 3; усилители мощности 4, 5; преобразователь координат 6; датчик 7 угловых положений СВВП; РМ 8, 9, 10, 11.
Представленное на Фиг.1 и 3 устройство стабилизации СВВП работает следующим образом. После предполетной подготовки пилот запускает подъемно-маршевые двигатели 3, 4 (см. Фиг.1) и подает питание на двигатели циркуляционных насосов 2, 3 (см.Фиг.2). При этом циркуляционные насосы 2, 3 закручивают жидкость или жидкий металл вокруг оси 0,1 и благодаря действию ГДН 4 вокруг собственной замкнутой оси тороидального кольца 1. Затем пилот выбирает ручной или автоматический режим взлета с помощью переключателя 2 (см. Фиг.3). При выборе автоматического режима коды значений заданных углов ориентации с выхода задатчика 1-2 поступают через переключатель 2 на входы схемы 3 сравнения. На вторые входы схемы 3 сравнения поступают сигналы с датчика 7 угловых положений СВВП через преобразователь координат 6, где сравниваются с сигналами задатчика 1-2. При наличии рассогласования между заданными углами ориентации с задатчика 1-2 и измеренными углами ориентации датчиком 7 на выходах схемы сравнения 3 формируются разностные сигналы того или другого знака, которые поступают на реверсивные приводы 2-х ортогональных пар РМ 8, 9 и РМ 10, 11, газодинамические моменты которых установят заданную угловую ориентацию СВВП или восстановят ее, если внутренние или внешние возмущающие воздействия приведут к нарушению заданной ориентации. Преобразователь 6 координат сдвигает углы, измеренные датчиком 7, на 90, так как плоскость прецессии ЖГ, как и ТГ, перпендикулярна плоскости приложенного результирующего момента 2-х пар газодинамических РМ 8, 9 и 10, 11. Дополнительно к этому преобразователь 6 сдвигает измеренные датчиком 7 углы вперед пропорционально времени срабатывания РМ.
В режиме взлета и посадки циркуляционные насосы 2, 3 (см. Фиг.2) работают в режиме максимально возможной мощности, так как до набора скорости хвостовое оперение 9, 10 (см. Фиг.1) еще не стабилизирует СВВП, что требуется для формирования максимально возможных гиростабилизирующего момента ЖГ и коэффициента демпфирования СВВП. Но не только мощность насосов играет роль, кроме того, необходимо добиться максимально возможной скорости упорядоченного движения жидкости или жидкого металла, которая ограничивается критическим значением числа Рейнольдса (ЧР). Для гладких труб критическое значение ЧР=1000-1200, после чего резко повышается гидравлическое сопротивление потоку. Таким образом, для увеличения энергии потока и соответственно гиростабилизирующего момента требуется увеличить критическое значение ЧР. Для этого внутреннюю поверхность тора полируют и на нее наносят специальный многослойный полимер, уменьшающий адгезию (прилипание) жидкости к стенкам тора. Дополнительно можно на внутреннюю стенку нанести согласованную с ГДН многозаходную спиральную нарезку. Благодаря этим мерам можно повысить ЧР до 20000÷30000. Благодаря действию ГДН 4 (см. Фиг 2) и нарезке поток жидкости или жидкого металла будет закручиваться не только вокруг главной оси OZ, которая проходит через центр масс СВВП (см. Фиг.1 и Фиг.3), но и вокруг второй собственной замкнутой оси тороидального кольца. Второе вращение дает кроме увеличения скорости упорядоченного вращения вокруг оси OZ еще одно полезное свойство представленного ЖГ: некоторый стабилизирующий эффект углового положения СВВП относительно оси курса. Этот эффект легко определяется, если разбить поток на небольшие элементарные вращающиеся гироскопы вокруг собственной замкнутой оси тора, которые одновременно вращаются вокруг оси OZ. Конечно, ввиду малости этих кинетических моментов этот эффект будет небольшим, второго порядка малости по сравнению с основным эффектом, но он все же полезен.
Выбор наполнителя ЖГ и угла его заливки определяется тем, какое соотношение между коэффициентом демпфирования и гиростабилизирующим моментом мы хотим получить. Применение для заливки ЖГ вязкой жидкости даст больший коэффициент демпфирования, а жидкого металла даст больший гиростабилизирующий эффект. Согласно военным ГОСТам наполнитель должен обеспечить рабочий температурный диапазон ЖГ не менее от -40°C до +50°C. Этим требованиям удовлетворяет глицерин с добавками и ртуть с добавками, например, натрия, калия, рутения, галлия. Но достижение максимально возможной скорости потока является приоритетным, так как это позволит снизить собственный вес ЖГ, который повышает взлетный вес СВВП. Но здесь мы должны учитывать, что бесплатно ничего не дается, а когда речь идет о сохранности техники и жизнях пилотов, можно пойти и на увеличение взлетного веса и некоторое снижение другой полезной нагрузки. Тем более, что заявленные TP решают сложнейшие задачи демпфирования и стабилизации неустойчивых и слабодемпфированных объектов с 6-ю степенями свободы, которые являются таковыми по своей физической природе в режимах вертикальных взлета, посадки зависания и известные решения с применением методов теории автоматического управления и регулирования полностью эти задачи не решают.
Таким образом, TP заявленного способа и устройства дают совмещение двух полезных технических результатов: одновременное демпфирование и стабилизацию неустойчивых и склонных к неустойчивости слабодемпфированных объектов управления с 6-ю степенями свободы в критических эксплуатационных режимах и при неблагоприятных сочетаниях переменных параметров и внешних воздействий. Эти полезные эффекты возникают благодаря введению неизвестных ранее новых признаков как в способ, так и в устройство. В способе это активное закручивание жидкой среды по тороидальному кольцу вокруг двух осей и формирование гиростабилизирующего эффекта от потока движущейся жидкой среды. Для устройства это введение неизвестного ранее тороидального ЖГ. Эффект демпфирования ранее известен, но известный ранее кольцевой демпфер применялся только для гашения нутационных колебаний ТГ. В нашем случае тороидальный ЖГ одновременно и гироскоп, и демпфер. Теория ТГ развивалась параллельно практическим разработкам. Теорию ЖГ еще предстоит создать и очевидно, что физические процессы во вращающейся жидкости намного сложнее, их математическое описание может быть создано на основе симбиоза представлений частично ТГ, гидродинамики, теории нелинейных колебаний и других дисциплин.
Выше показано, что заявленные TP способа и устройства обладают новизной, не вытекают явным образом из современного уровня гироскопии, теории и практики гироскопических стабилизирующих систем, которая опирается только на применение ТГ, теории устойчивости и управляемости движения ЛА, где гироскопический эффект применяется только для стабилизации ВЗУР и ВУАС за счет придания вращения корпусу, современных достижений стабилизации СВВП, что показывает соответствие их критериям новизны и изобретательского уровня. В настоящее время существуют производственно-технологические возможности для реализации заявленных ТР. Некоторые новые подходы потребуются в технологии изготовления тороидального ЖГ, при обработке его внутренней поверхности, при стыковке с циркуляционными насосами или другими разгонными устройствами жидкой или жидкометаллической среды. Циркуляционные насосы разработаны и применяются в атомной промышленности. Некоторые доработки могут потребоваться для перехода на авиационные стандарты сети переменного тока и для уменьшения кавитации на лопастях нагнетающих турбин, но все эти проблемы разрешимы. Таким образом, заявленные TP соответствуют критерию промышленной применимости.
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Пашковский И.М. «Устойчивость и управляемость самолета», Маш-е, 1975.
2. Шаталов А.С. и др. «Летательный аппарат как объект управления», Маш-е, 1975.
3. Воронов А.А. «Устойчивость, управляемость, наблюдаемость», М., Наука, 1979.
4. Красовский И.Н. «Теория управления движением», М., 1968.
5. Красовский И.Н. «Некоторые задачи теории устойчивости движения», М., 1959.
6. Казаков и др. «Системы управления и динамика наведения ракет», ВВИА им. Жуковского, 1973.
7. Бюшгенс Г.С., Студнев Р.В. «Динамика самолета: пространственное движение», М., Маш-е, 1975.
8. Журнал «Взлет», №8.9, стр.5.
9. Гордон Е. «ЯК-38».
10. Патент РФ №2036273.
11. Котик М.Г. «Динамика взлета и посадки самолета», М., Маш-е, 1984.
12. Ишлинский А.Ю. «Теория гироскопов», МГУ, 1974.
13. Павловский М.А. «Теория гироскопов», Киев, 1986.
14. Пельпор Д.С. «Теория гироскопов и гиростабилизаторов. Гироскопические системы» ВШ. 1975.
15. СССР, Патент №134453; СССР, А.с. №2230293, №2116623.
16. Николаев А.М., Тимашов Н.А. «Система стабилизации и наведения оптического прибора в условиях широкого спектра возмущений», ВОТ, сер.9, вып.5,
- Техническое описание и инструкция по эксплуатации комплекса 9К32, изделия 9Э46, Оборонгиз, 1970; Техническое описание и инструкция по эксплуатации комплекса 9К38, Оборонгиз, 1980,
- Патент США №4309393, СССР, А.с. №214409, №317301, №320963, Патент РФ №2093850.
Аналоги способа и устройства.
17. Патент РФ №2378156 «Летательный аппарат ВВП», прототип способа и устройства.
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ СОКРАЩЕНИЙ
СВВП - самолет вертикального взлета и посадки; ОЭСК - оптико-электронный следящий координатор; ОЭСС - оптико-электронная следящая система; ОГС - оптическая головка самонаведения; ВЗУР - вращающаяся зенитная управляемая ракета; ВУАС - вращающийся управляемый артиллерийский снаряд; ЛА - летательный аппарат; ЛАВВП - летательный аппарат вертикального взлета и посадки; ТЗ - техническое задание; САУ - система автоматического управления; ТГ - твердотельный гироскоп; ЖГ - жидкостный или жидкометаллический гироскоп; TP - техническое решение; ТРД - турбореактивный двигатель; ГДН - газодинамическая насадка; ГДН - гидродинамическая насадка; РМ - руль-машинка; ЧР - число Рейнольдса.
Группа изобретений относится к области управления угловым движением преимущественно нелинейных нестационарных систем с переменными параметрами, в частности летательных аппаратов (ЛА) с вертикальными взлётом и посадкой. Способ заключается в формировании гиростабилизирующего момента ЛА с помощью жидкостного гироскопа (ЖГ): тороидального кольца, в котором осуществляется спиральная закрутка потока жидкости (жидкого металла) вокруг центральной и круговой осей тора. ЖГ закрёплен внутри ЛА через амортизаторы. Устройство, в варианте ЛА вертикального взлета и посадки, содержит указанный ЖГ, два циркуляционных насоса и гидродинамические насадки для указанной спиральной закрутки жидкости. Имеется система управления прецессионным движением ЖГ, исполнительными органами которой служат две пары газоструйных рулей, расположенных на взаимно перпендикулярных осях. Техническим результатом группы изобретений является повышение устойчивости управляемых объектов рассматриваемого типа. 2 н.п. ф-лы, 3 ил.
1. Способ стабилизации и демпфирования слабодемпфированного неустойчивого или склонного к неустойчивости объекта управления с шестью степенями свободы, основанный на формировании гиростабилизирующего момента вращением массы, механически закрепленной внутри или снаружи объекта, имеющей ось симметрии, проходящую через центр масс объекта, задании и коррекции его угловой ориентации от двух ортогональных пар газодинамических рулей, отличающийся тем, что гиростабилизирующий кинетический момент формируют спиральной закруткой и поддержанием режимов вращения жидкой среды одновременно вокруг центральной и круговой осей тора, а коррекцию ориентации объекта производят управлением прецессионным движением жидкого ротора, ограниченного твердотельной поверхностью тора.
2. Устройство для осуществления способа по п. 1, содержащее силовой стабилизирующий гироскоп, механически соединенный с шестистепенным объектом управления, систему задания и коррекции угловой ориентации, выходы которой подключены на входы приводов двух ортогональный пар газодинамических рулей, отличающееся тем, что силовой гироскоп выполнен в виде полностью или частично заполненного жидкой средой тороидального кольца, внутри которого установлены один или более циркуляционных насосов, а снаружи - одно или более устройств разгона и поддержания оптимального режима вращения, а на турбины насосов или внутреннюю поверхность тора установлена по меньшей мере одна гидродинамическая насадка для вихревой спиральной закрутки потока жидкой среды.

