Изобретение относится к гироскопической технике и касается подкласса гироскопов с жидкими роторами. Предлагается новая разновидность жидкостных гироскопов для силовой стабилизации и демпфирования объектов управления, регулирования, контроля и регистрации с шестью степенями свободы, слабодемпфированных и склонных к неустойчивости, подвергающихся сложным, более чем с одной степенью свободы, механическим внутренним воздействиям и внешним возмущениям. Например, вибрациям, ударам, тряске, качке, турбулентным гидро- и аэродинамическим воздействиям.
Прежде чем описывать историю известных ранее способов и устройств стабилизации и демпфирования обозначенных объектов, раскроем применяемые далее в тексте термины.
Стабилизация (stabilization) - это регулирование с целью обеспечить постоянство значений управляемых координат объекта. Например, угловых и пространственных положений и перемещений, угловых скоростей, поля зрения оптико-электронной следящей системы и т.п.
Гиростабилизация - это стабилизация объекта на основе использования гироскопов и гироскопических систем.
Устойчивость (stabiliti) - это многозначное понятие (асимптотическая, по Ляпунову, экспоненциальная, абсолютная, по действию возмущений и т.д.). Объясняется особой значимостью и тем, что в этой области хорошо поработали теоретики-математики и каждый внес свою лепту и свой математический аппарат.
Демпфирование - термин не определен комитетом научно-технической терминологии при академии наук, поэтому даю свое понимание. Слово заимствовано из английского и имеет два корня: "demo", "demp" - уменьшать, снижать; "fear","fiar" - пламя, огонь, волнение, возбуждение. Можно было обойтись без английского, но господа теоретики любят демонстрировать свою ученость, применяя иностранные слова. Однако русский язык намного богаче и точнее, а наши слова имеют больше смысловых оттенков. Вместо "демпфирования" уместнее использовать "гашение, снижение, затухание, ослабление, успокоение, поглощение…" Таким образом, демпфер - это устройство, способное поглощать энергию вибраций, ударов и других механических воздействий на объект, энергию нутационных колебаний роторов гироскопов, переводя ее в другие формы, не приносящие вреда объекту и не изменяющие его параметры. Тем самым нейтрализуя, или ослабляя, вредную механическую нагрузку. Количественно эффективность поглощения энергии воздействий определяют как коэффициент демпфирования.
Известно, какое важное значение для надежности имеет стойкость и устойчивость объектов к всевозможным видам внутренних и внешних воздействий. Как правило, они сводятся к колебательным процессам в контуре управления и регулирования, механическим колебаниям объекта в целом и его частей, называемых вибрациями (1), к потере устойчивости ориентированного движения и при превышении допустимого уровня - к разрушению объекта.
Таким образом, вначале кратко рассмотрим некоторые аспекты теории колебаний. Колебательные процессы вездесущи и проявляются в любых телах и средах. Например, теплота есть не что иное, как колебания атомов и молекул, а температура - мера интенсивности этих колебаний. Звук - это низкочастотные колебания диапазона 20-20000 Гц. Радиоволны есть высокочастотные пространственно-временные колебания электромагнитных полей. Свет - это колебания тех же полей еще более высоких частот, испускаемые дискретно волновыми пакетами (фотонами). Наконец, существует вполне разумная и логичная гипотеза (в отличие от релятивистской), что все силовые поля, гравитационное, электрическое, магнитное и др., есть ничто иное, как вихревые колебания первичного эфира с невообразимо высокими частотами. Склонны к колебаниям системы автоматического управления и регулирования (САУР), особенно если они разработаны без расчета запаса устойчивости и без должной оценки функционирования на полуфизической модели. Склонны к нутационным колебаниям механические твердотельные гироскопы. Внешние механические возмущения, удары, тряска, качка и др. также инициируют (возбуждают) вибрации объектов (1).
Существуют множество видов и форм вибраций: линейные моно- и полигармонические, узко- и широкополосные, детерминированные и случайные (стохастические), собственные и вынужденные внешними силами, уединенные (солитоны), резонансные, когда собственные частоты тел совпадают с частотой вынуждающей силы. При резонансе амплитуды перемещений и сил многократно возрастают.
Все виды и формы вибраций хорошо изучены и разработаны меры защиты от их негативного влияния на объекты (1). Однако еще слабо изучены и недостаточно описаны в литературе сложные виды механических воздействий и вибраций с более чем одной степенью свободы, хотя они широко распространены (некоторые описаны, см. (2)). Дело в том, что до сих пор не разработан математический аппарат таких пространственно-временных (т.е. когда аргументами являются и время, и пространственные координаты) сложных колебаний с более чем одной до шести степеней свободы. Яркий пример - "флаттер", при котором колебания крыла самолета одновременно могут быть крутильными, поперечными и продольными. Из гидро- и аэродинамики известно, что на больших скоростях обтекания средой объектов при определенных начальных условиях (температура, скорость циркуляции потока, коэффициент вязкости среды, форма и состояние поверхности объекта) возбуждается турбулентность, поверхности разрывов и скачки уплотнения и другие непредвиденные негативные воздействия на объекты. Такие воздействия могут возбудить весьма сложные колебания с большим числом степеней свободы. Задача защиты от негативных воздействий (демпфирование) сложных колебаний пока полностью не решена.
Задачи стабилизации объектов и демпфирования, как правило, сопрягаются. Например, при слежении за звездой или другим космическим источником излучения с помощью средств, расположенных как на неподвижных, так и движущихся основаниях, требуется надежно стабилизировать угловые положения основания и демпфировать возможные вибрации. Такие же требования прецезионных стабилизации и демпфирования предъявляются к объектам, с которых производится съемка баллистических ракет и их головных частей на фоне звездного неба. 2-3 таких снимка позволяют вычислить дальнейшую траекторию их движения. Для стабилизации объектов широко применяют гироскопы и гироскопические системы. Например, для гиростабилизации поля зрения оптической системы оптических головок самонаведения (ОГС) используется трехстепенной астатический гироскоп на внутреннем кардановом подвесе.
Прежде чем перейти к описанию аналогов и прототипа известных гиростабилизаторов и систем, кратко коснемся механических испытаний объектов вооружений и военной техники (ВВТ) с имитацией реальных воздействий. Ранее в СССР эти испытания жестко регламентировались ГОСТами. Перечислим основные виды. 1. Испытания на ударо- и виброустойчивость проводятся с целью проверить способность изделий ВВТ сохранять свои функции и параметры в условиях ударных и вибрационных воздействий, близких к реальным. 2. Ударо- и вибропрочность означают способность изделий ВВТ к функционированию после длительных, многократных вибрационных и ударных воздействий. Испытания на удар проводят на копре или стенде, а на виброустойчивость и прочность - на вибростенде. Основным параметром механических воздействий является ускорение, так как изменяющиеся во времени и объеме объекта силы и амплитуды перемещений характеризуются ускорением. Скорость затухания колебаний зависит от степени демпфирования объекта. Когда собственные частоты и частоты вынуждающих сил совпадают, возникают неприятные резонансные явления. При этом амплитуды вибраций многократно возрастают. При длительном воздействии вибраций в слабых местах объекта возникают концентрации сил, которые дают усталостные микроповреждения. По этой причине происходит много авиационных аварий и катастроф. Чем шире спектр вибраций, тем они опаснее, так как мощность, передаваемая волной вибрации, пропорциональна квадрату частоты. Чем больше степеней свободы имеет сложное механическое воздействие, тем оно опаснее, так как задача гашения и устранения возможных неблагоприятных последствий значительно усложняется. Все вышеизложенное говорит о том, какое важное значение имеет стабилизация и демпфирование объектов с шестью степенями свободы.
Рассмотрим известные устройства стабилизации и демпфирования на основе использования гироскопов. Известны гиростабилизаторы (3) с использованием одного, двух и трех твердотельных двух- и трехстепенных гироскопов. Не вдаваясь в принципы построения и функционирования таких устройств (тема заявки касается гиростабилизатора с жидкими роторами), отметим их основные недостатки. Твердотельные механические гироскопы - очень сложные и дорогие приборы. Они требуют сверхточных и стабильных размеров, применения прецезионных деталей. Но существуют температурные, упругие и другие деформации, что нарушает балансировку и размеры деталей. Через твердотельные кардановые подвесы хорошо передаются механические воздействия на ротор, что дает склонность к нутационным колебаниям оси вращения. Чтобы обеспечить точную балансировку, требуется применять прецезионные скоростные и кардановые подшипники. Но даже простая пылинка может вызвать их заклинивание. Автору известен скандальный случай, когда несколько партий ПЗРК "Стрела - 2М", хранящихся на складах в Индии, были забракованы. Причина простая, от высокой температуры размягчался клей, попадал в скоростные подшипники, что приводило к заклиниванию ротора гироскопа. При широкополосной вибрации твердотельные гироскопы склонны к резонансам.
Более совершенным является известное устройство (4) гиростабилизации поля зрения оптико-электронного следящего координатора (ОЭСК) вращающихся зенитных управляемых ракет (ВЗУР). Известное устройство содержит оптическую систему, размещенную на роторе-магните трехстепенного астатического гироскопа с управляемым прецессионным движением. Также на роторе установлен кольцевой демпфер, заполненный ртутью. Радиально намагниченный ротор-магнит расположен внутри сферического соленоида. Соленоид и втулка, на которую крепится внутренний кардановый подвес, установлены на вращающемся вместе с ракетой основании. При пропускании через витки соленоида гармонического тока заданной величины и фазы на частоте вращения ротора происходит взаимодействие магнитных полей ротора и соленоида, создающее момент, разворачивающий ротор в направлении вращения линии визирования, устраняя рассогласование в контуре слежения за целью. Известное устройство гиростабилизирует поле зрения оптической системы ОЭСК, а кольцевой ртутный демпфер гасит нутационнные колебания оси вращения ротора при ударных и вибрационных воздействиях с ускорением до 50g. Однако область применения известного устройства ограничена объектами с пятью степенями свободы, стабилизированными вращением.
Наиболее близким по технической сущности (но не по назначению, т.е. условным прототипом) является система (5) угловой ориентации космического аппарата путем изменения кинетического момента внутренних частей системы за счет придания импульса циркуляции жидкой среде в одном и более трубопроводных контуров. Наиболее близкое решение состоит из одного, трех или более контуров трубопроводов, расположенных в 3-х взаимно перпендикулярных плоскостях, резервуара с жидкой средой, одного или более циркуляционных насосов и клапанов. Для придания движения космическому аппарату и управления его ориентацией включают насосы, которые отрабатывают заданный импульс количества движения жидкой среды. При этом изменение кинетического момента придает вращение аппарату и он приобретает заданную ориентацию в звездном пространстве. Система имеет ряд существенных достоинств и преимуществ по сравнению с механическими маховиковыми и системами, в которых возмущающие моменты компенсируются действием рулевых органов, управляющих силами, внешними по отношению к объекту. Прежде всего это малые собственные веса и габариты. Величина управляющего кинетического момента здесь достигается не за счет увеличения массы жидкой среды, а за счет увеличения линейных размеров контуров и скорости циркуляции (увеличение массы дает линейное приращение момента, а увеличение размеров контуров и скорости жидкости - квадратическое). Кроме того, трубопроводы можно располагать снаружи аппарата, что освобождает и увеличивает объем внутреннего пространства космического аппарата.
Однако несмотря на все достоинства наиболее близкое решение не дает постоянной стабилизации и демпфирования объекта от механических возмущений сложного характера с более чем одной степенью свободы.
Целью изобретения является стабилизация и демпфирование объектов с шестью степенями свободы, подвергающимися сложным внутренним и внешним механическим воздействиям с более чем одной степенью свободы.
Указанная цель достигается тем, что в устройство, содержащее один или более трубопроводных контура импульсной циркуляции жидкой среды, расположенных в 3-х взаимно перпендикулярных плоскостях, один или более насосов нагнетания жидкости, вводят циркуляционные насосы в каждый конур, которые выполняют в виде магнитного двигателя, ротор которого совмещают с гидротурбиной, или в виде магнитогидродинамической (МГД) машины (6), которые устанавливают снаружи на внешней поверхности каждого из контуров, заполненных постоянно циркулирующей вязкой жидкостью с токопроводящими добавками или жидким металлом. Такое выполнение устройства в виде одного или более трубопроводных контуров с постоянной циркуляцией (вращением) жидкой среды с сохранением их пространственной топологии в трех взаимно перпендикулярных плоскостях дает ему новую функцию и назначение как гиростабилизирующей и одновременно демпфирующей системы с тремя осями стабилизации. Кроме того, введение перечисленных новых признаков, новые положение и взаиморасположение насосов благодаря наличию контуров с жидкими роторами постоянно циркулирующей жидкости обеспечивает кроме стабилизации и повышения устойчивости объекта дополнительно второй заявленный положительный эффект - демпфирование механических воздействий сложного характера с более чем одной степенью свободы. В наиболее близкой системе ориентации космического аппарата насос устанавливают вне контуров, жидкая среда содержится в резервуаре и подается дозированным импульсом через клапаны для придания вращения аппарату.
Предложенное решение сохраняет все достоинства наиболее близкого и приобретает новые функции и новые полезные технические свойства. Достигается гиростабилизация объекта по всем координатам, демпфирование сложных воздействий, сохраняется простота и малый собственный вес, самобалансировка, а при использовании МГД машин - полное отсутствие подвижных механических частей. Сохраняется возможность приспосабливать форму и расположение контуров циркуляции под формы конкретного объекта, учитывая его назначение и решаемые задачи. Они могут располагаться как внутри, так и вне объекта.
Выше показано, что по отношению к известным гиростабилизирующим устройствам и системам гиростабилизации предложенное решение неочевидно, оригинально и обладает новизной. До сих пор неизвестны гиростабилизаторы, имеющие три оси стабилизации и демпфирования. Новизну и неочевидность предлагаемого решения доказывает и тот факт, что прототип пришлось выбирать условно другого назначения. (Вспоминаем, что прототип - это наиболее близкое решение по технической сущности и назначению.) Предлагаемое решение может быть использовано с применением для изготовления контуров известных полимерных материалов и композитов, известных магнитных и МГД электрических машин. В качестве жидкой среды могут быть использованы вязкие жидкости с электропроводящими добавками или жидкие металлы, выдерживающие заданный ГОСТами для ВВТ температурный диапазон от -40°C до +50°C. Этим условиям удовлетворяют ртуть с добавками или сплавы натрия и калия с добавками редкоземельных металлов (индия, рутения, галлия и т.д.). Таким образом, решение удовлетворяет критерию промышленной применимости.
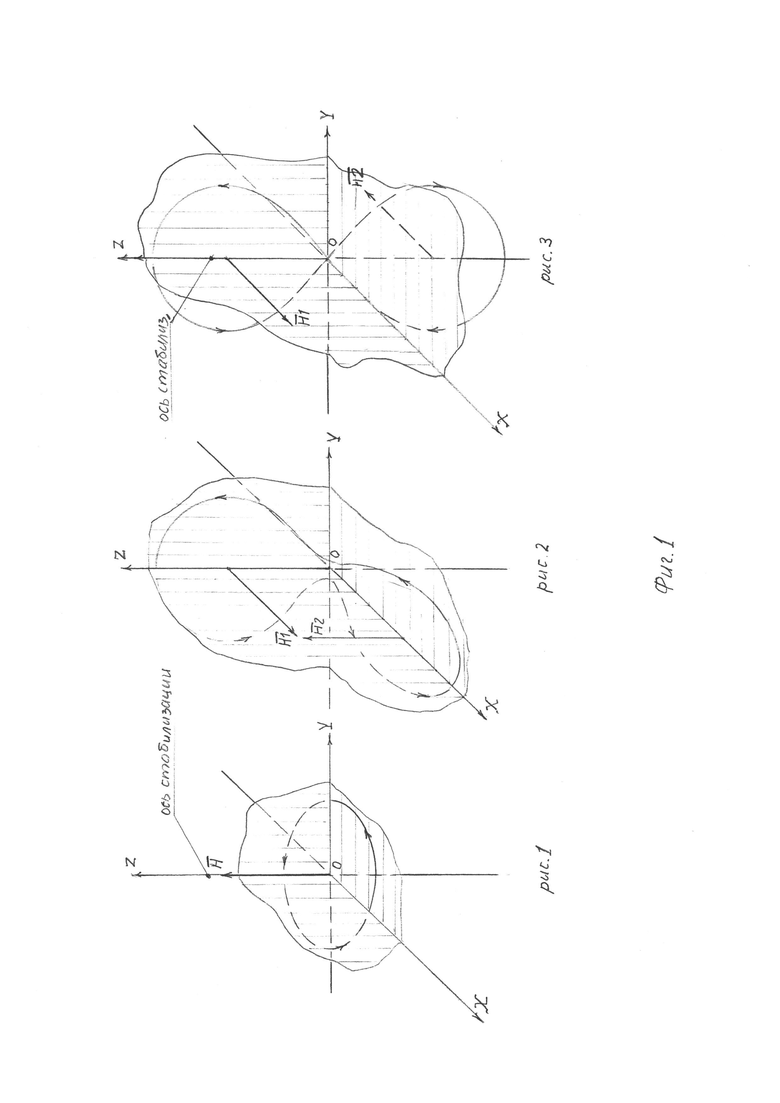
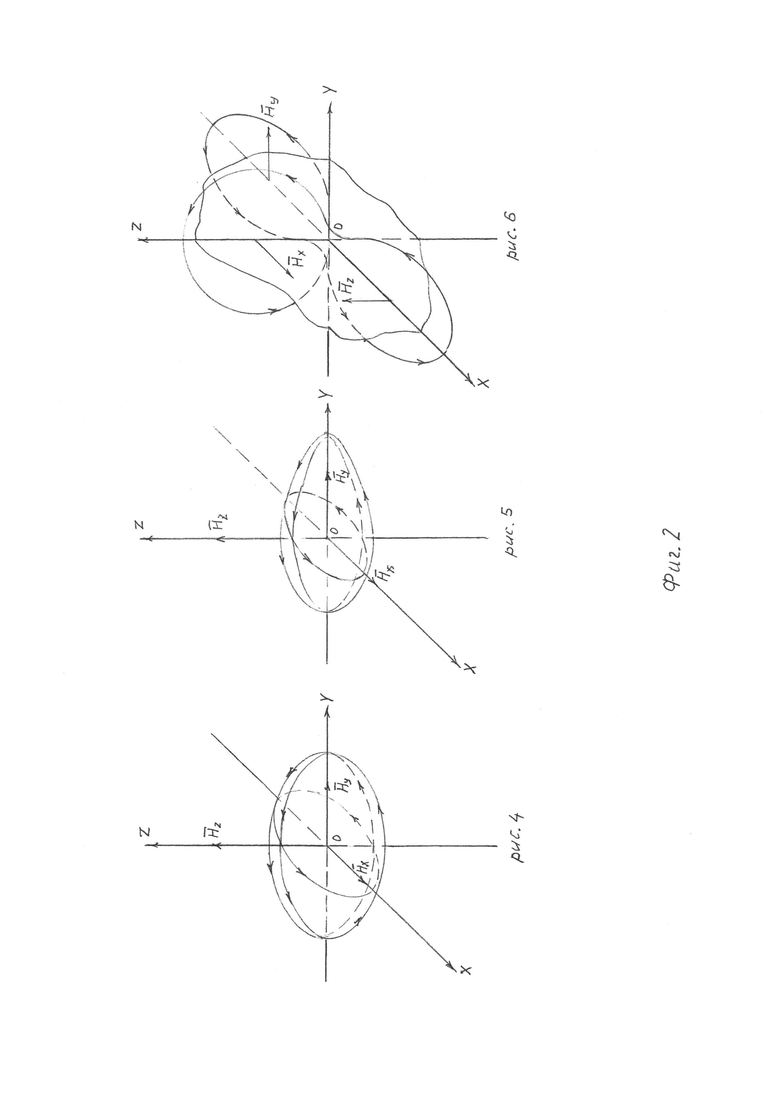
На Фиг. 1 и Фиг. 2 изображены на рис. 1-6 некоторые базовые и более сложной топологии контуры циркуляции жидкой среды. На Фиг. 3 - пример исполнения простейшего контура с циркуляционным МГД двигателем. Для упрощения восприятия контуры циркуляции жидкой среды изображены сплошными линиями в первом октанте прямоугольной правой декартовой системы координат и пунктирными - в остальных семи октантах. Ось абсцисс обозначена OX, ординат OY, аппликат OZ.
На рис. 1 изображен самый простейший контур циркуляции в виде тора (сам трубопровод не показан, направление циркуляции против часовой стрелки). Такой контур имеет одну ось стабилизации, совпадающую с осью аппликат, и вектор  кинетического момента вращающейся жидкой среды. Вектор
кинетического момента вращающейся жидкой среды. Вектор  расположен по главной оси тора и его фазовая компонента также проходит по оси симметрии. На рис. 2 показан более сложный пример базового контура с двумя осями стабилизации. Он имеет две петли циркуляции, расположенные в двух взаимно перпендикулярных плоскостях и без нарушения связности циркуляции. На рис. 3 показан еще один пример выполнения базового контура в виде двух петель циркуляции, расположенных в одной плоскости и образованных поворотом на 180°. На рис. 4 изображен самый простейший вариант устройства с тремя осями стабилизации. Он состоит из трех тороидальных контуров, расположенных в трех взаимно перпендикулярных плоскостях. Плюс такого решения в его простоте, минус - для каждого контура требуется свой циркуляционный насос. На рис. 5 показан этот же вариант для объекта, обладающего асимметрией по оси OY. И наконец, на рис. 6 показан пример выполнения устройства с одним контуром (соответственно требуется только один насос) и тремя осями стабилизации. Благодаря использованной пространственной топологии три петли одного контура расположены в трех взаимно перпендикулярных плоскостях, и в каждой петле жидкая среда циркулирует в положительном направлении против часовой стрелки. Возможны и другие варианты топологии как базовых контуров, так и их комбинаций и сочетаний.
расположен по главной оси тора и его фазовая компонента также проходит по оси симметрии. На рис. 2 показан более сложный пример базового контура с двумя осями стабилизации. Он имеет две петли циркуляции, расположенные в двух взаимно перпендикулярных плоскостях и без нарушения связности циркуляции. На рис. 3 показан еще один пример выполнения базового контура в виде двух петель циркуляции, расположенных в одной плоскости и образованных поворотом на 180°. На рис. 4 изображен самый простейший вариант устройства с тремя осями стабилизации. Он состоит из трех тороидальных контуров, расположенных в трех взаимно перпендикулярных плоскостях. Плюс такого решения в его простоте, минус - для каждого контура требуется свой циркуляционный насос. На рис. 5 показан этот же вариант для объекта, обладающего асимметрией по оси OY. И наконец, на рис. 6 показан пример выполнения устройства с одним контуром (соответственно требуется только один насос) и тремя осями стабилизации. Благодаря использованной пространственной топологии три петли одного контура расположены в трех взаимно перпендикулярных плоскостях, и в каждой петле жидкая среда циркулирует в положительном направлении против часовой стрелки. Возможны и другие варианты топологии как базовых контуров, так и их комбинаций и сочетаний.
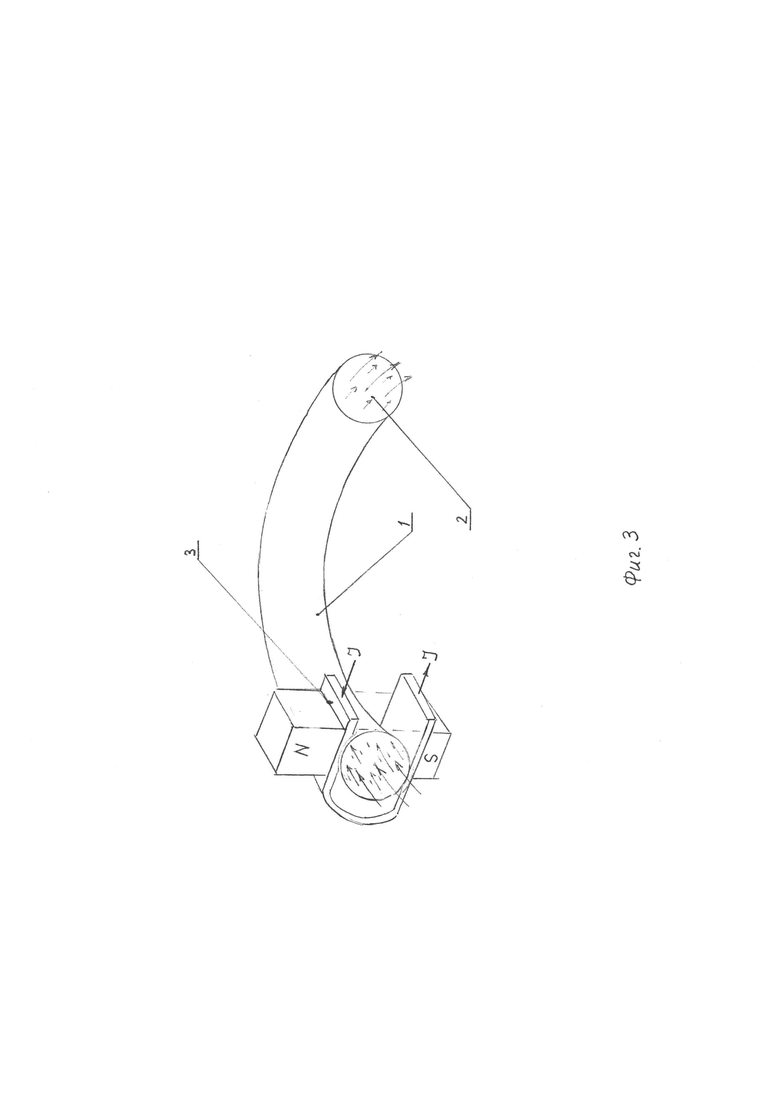
На Фиг. 3 изображен эскиз части контура и циркуляционный насос на основе применения МГД машины. Здесь показаны часть контура 1, жидкая среда 2 и МГД насос 3. Этот вариант самый простой и предпочтительный, так как не содержит движущихся механических частей (устройство МГД машины не показано, это известный тип электрической машины, подробности конструкции и принцип его функционирования описаны, например, в "Электрические машины". Т. 2, стр. 301-304. М.: Высш. шк., 1987). Преимущества такого исполнения насоса очевидны, единственный недостаток МГД электрических - это небольшой кпд по сравнению с другими типами машин. Но этот недостаток окупают простота стыковки с контуром при полном отсутствии любых движущихся частей.
Выше показано, что предлагаемое техническое решение обладает новизной, не вытекает очевидным образом из существующего уровня развития техники гироскопов с жидким ротором и уровня техники устройств и систем стабилизации и демпфирования объектов с шестью степенями свободы, подвергающихся механическим воздействиям и возмущениям сложного характера с более чем одной степенью свободы, и обладает промышленной применимостью. Берусь утверждать, что данное направление обладает большим потенциалом дальнейшего развития и совершенствования. Предложенное устройство позволяет вводить в контуры циркуляции топологические особенности, учитывающие свойства конкретных объектов и решаемые ими задачи, учитывать особенности геометрической формы объектов. Так, для компенсаций неблагоприятных форм конструкции, неблагоприятных понижающих устойчивость соотношений моментов инерции можно вводить в топологию контуров циркуляции соответствующие компенсирующие асимметрии, антисимметрии и диссимметрии. А для возникающих при этом разбалансов вводить там, где это нужно, плавные изменения внутреннего диаметра трубопроводов для регулирования скорости потока жидкой среды. Но это тема другой заявки.
ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. "Вибрации в технике". Под редакцией В.Н. Челомея. В 6-ти томах. М.: Машиностроение, 1978-1981.
2. "Vibration". R.E.D. Bishop, Cambrig, 1965.
3. "Теория гироскопических стабилизаторов". Д.С. Пельпор. М.: Машиностроение, 1965, стр. 348; "Ориентация, гироскопы и инерциальная навигация". А.Ю. Ишлинский. М.: Наука, 1976, стр. 670; "Теория гироскопов и гиростабилизаторов". Д.С. Пельпор. М.: Высш. шк., 1986, стр. 244-335.
4. "Оптико-электронные приборы наведения". Лазарев Л.П.. М., 1989, стр. 347-348, стр. 454; Патент РФ №2101721; Патент США №4009393.
5. US, Патент №5026008 - прототип.
6. Д.Э. Брускин и др. "Электрические машины". Т. 2. М.: Высш. шк., 1987, стр. 301-304; Роза. "Магнитогидродинамическое преобразование энергии". М.: Мир, 1970.
Изобретение относится к классу гироскопов с жидкими роторами и касается гироскопической системы для стабилизации и демпфирования объектов с шестью степенями свободы, подвергающихся сложным, более чем с одной степенью свободы, механическим воздействиям и возмущениям. Жидкостное гироскопическое устройство для стабилизации и демпфирования объектов с шестью степенями свободы состоит из массы жидкой среды, одного или более трубопроводных контуров для циркуляции жидкой среды, круглой или другой формы, расположенных в трех взаимно перпендикулярных плоскостях, одного или более насосов, при этом в каждый контур, заполненный вращающейся жидкой средой, установлены циркуляционные насосы, которые выполнены в виде, например, магнитных двигателей, статор которых расположен на внешней поверхности контура, а ротор, совмещенный с гидротурбиной, внутри герметичного контура на том месте, где расположен статор, или в виде магнитогидродинамической машины, расположенной на внешней поверхности каждого контура. Технический результат - одновременная стабилизация по трем осям и демпфирование шестистепенных объектов, подвергающихся механическим воздействиям сложного характера. 3 ил.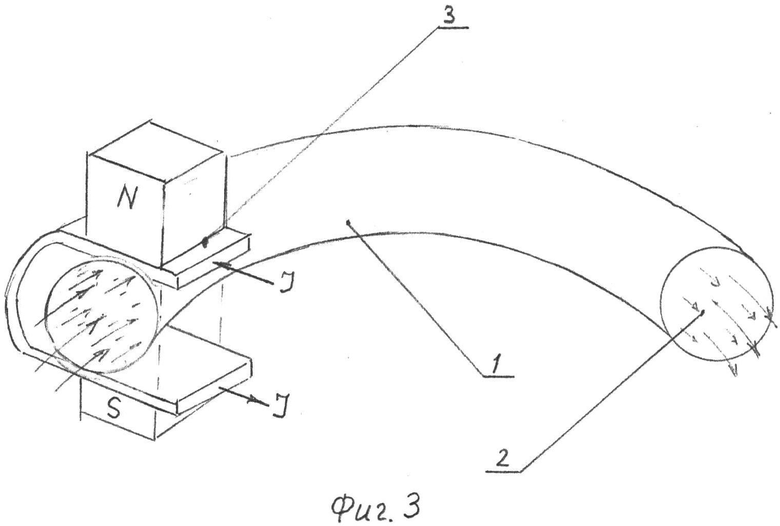
Жидкостное гироскопическое устройство для стабилизации и демпфирования объектов с шестью степенями свободы, состоящее из массы жидкой среды, одного или более трубопроводных контуров для циркуляции жидкой среды, круглой или другой формы, расположенных в трех взаимно перпендикулярных плоскостях, одного или более насосов, отличающееся тем, что с целью стабилизации и демпфирования объекта в каждый контур, заполненный вращающейся жидкой средой, установлены циркуляционные насосы, которые выполнены в виде, например, магнитных двигателей, статор которых расположен на внешней поверхности контура, а ротор, совмещенный с гидротурбиной, внутри герметичного контура на том месте, где расположен статор, или в виде магнитогидродинамической машины, расположенной на внешней поверхности каждого контура.
| US 5026008 A, 25.06.1991 | |||
| US 3516280 A, 23.06.1970 | |||
| US 3543587 A, 01.12.1970 | |||
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1996 |
|
RU2119146C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2433375C2 |

