Изобретение относится к электротехнике, а именно к системам регулируемого электропривода на базе синхронных двигателей с преобразователями частоты (ПЧ). Изобретение может быть использовано для демпфирования колебаний частоты вращения синхронных электродвигателей, в которых отсутствует возможность непосредственного измерения угла нагрузки Θ, в частности для систем скалярного электропривода при раздельном формировании амплитуды и частоты питающего напряжения, и применено в различных видах ПЧ.
Известен способ двухзонного амплитудно-фазового перевозбуждения синхронных гистерезисных электродвигателей с инерционной нагрузкой, при котором одновременно с увеличением и последующим снижением напряжения питания регулируют фазу результирующего вектора напряжения [1]. Недостатком данного способа является его применимость только для инверторов с прямоугольно-ступенчатой формой выходного напряжения.
Наиболее близким к предложенному способу является способ стабилизации частоты вращения электродвигателей переменного тока (варианты) [2], который обеспечивает стабилизацию частоты вращения электродвигателей переменного тока, питающихся от статических преобразователей частоты, содержащих инвертор с прямоугольно-ступенчатой формой выходного напряжения, при этом изменяют сформированное с помощью инвертора питающее напряжение электродвигателя посредством сигнала обратной связи, который формируют пропорционально фазе второй производной фазного тока электродвигателя на одном из коммутационных интервалов инвертора. Недостатком данного способа является его применимость только для инверторов с прямоугольно-ступенчатой формой выходного напряжения.
Предложенный способ стабилизации частоты вращения синхронного двигателя решает задачу эффективного гашения автоколебаний ротора синхронных машин.
Поставленная задача решается тем, что согласно способу стабилизации частоты вращения синхронного двигателя, питающегося от статического преобразователя частоты, в соответствии с которым изменяют сформированное с помощью инвертора питающее двигатель напряжение посредством отрицательной обратной связи, вычисляют отклонение угла нагрузки от среднего значения за период автоколебаний, определяют корректирующий сигнал, пропорциональный отклонению угла нагрузки от среднего значения, вычитают этот корректирующий сигнал из сигнала задания фазового угла синусоидального напряжения, чем обеспечивают его фазовый сдвиг.
На фиг. 1 показана схема устройства, реализующего предложенный способ стабилизации частоты вращения электродвигателей переменного тока.
Устройство, реализующее предложенный способ, содержит синхронную машину 1, преобразователь частоты 2, датчики тока 3, датчики напряжения 4, наблюдатель угла нагрузки Θ 5, блок вычисления среднего значения угла нагрузки Θ за период автоколебаний Τθ 6, сумматор 7, блок масштабирования отклонения мгновенного значения угла нагрузки ΔΘ, который осуществляет перевод отклонения в управляющее воздействие на положение вектора напряжения статора 8, сумматор 9.
Способ стабилизации частоты вращения синхронного двигателя заключается в следующем. Частота свободных колебаний угла нагрузки определяется параметрами как электрической, так и механической частей привода. Статическая нагрузка привода определяется средней за период свободных колебаний величиной угла нагрузки Θ. Для гашения свободных колебаний электропривода, как следует из положений теории классической механики, для успешного подавления колебаний управляющее воздействие должно прикладываться в фазе с колебаниями системы. Блок преобразователя 2, содержащий инвертор, формирует питающее напряжение u1 электродвигателя 1 согласно заданию на амплитуду U1, частоту f1 и фазу φ
u1=U1*sin(ω1*t+φ),
где ω1=(2*π*f1)/p; p - число пар полюсов статора.
Блок наблюдателя 5 на основании сигналов с датчиков тока 3 и напряжения 4 вычисляет мгновенное значение угла нагрузки Θ, затем реализуется алгоритм определения отклонения угла нагрузки от его среднего значения за период свободных колебаний. В блоке 6 вычисляется среднее значение угла нагрузки Θ со временем осреднения ТΘ. Далее на выходе сумматора 7 формируется величина отклонения ΔΘ угла нагрузки от среднего значения. В блоке 8 масштабирования отклонения мгновенного значения угла нагрузки ΔΘ происходит умножение на коэффициент Κφ. Сумматор 9 вычитает сформированный сигнал коррекции из задания фазового угла синусоидального напряжения, чем обеспечивается его фазовый сдвиг.
Величину масштабирующего коэффициента Κφ необходимо выбирать исходя из требований интенсивности стабилизации угла нагрузки. Κφ должен быть меньше единицы, иначе система станет неустойчивой, однако чем ближе его величина к единице, тем больше быстродействие контура стабилизации угла нагрузки Θ. Из этих соображений для каждого отдельно взятого электропривода подбирается величина коэффициента Κφ. Постоянная времени осреднения ТΘ должна быть обязательно не меньше периода свободных колебаний системы электропривода. Однако при выборе слишком большой величины этой постоянной времени это может привести к ухудшению динамических характеристик системы при изменении нагрузки на валу. Поэтому эту постоянную времени необходимо выбирать в пределах (1…2)*Т0, где Т0 - период свободных колебаний разомкнутой системы электропривода.
Преимуществами данного способа по отношению к аналогам являются: простота реализации алгоритма стабилизации частоты вращения синхронного двигателя, универсальность метода и возможность применения в различных видах ПЧ.
Литература
1. Патент RU №2375813 C1, кл. Н02Р 21/05, Н02Р 6/00 от 10.12.2009.
2. Патент RU №2164053 С1, кл. Н02Р 7/42, Н02Р 7/62 от 10.03.2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Устройство для питания синхронного гистерезисного двигателя с амплитудно-фазовым перевозбуждением | 2016 |
|
RU2637111C1 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| Устройство для питания синхронного гистерезисного двигателя с фазовым перевозбуждением | 2017 |
|
RU2661332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОМЕНТА ТЯГОВОГО ИНДУКТОРНОГО ЭЛЕКТРОПРИВОДА | 2006 |
|
RU2315419C2 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С СИНХРОННЫМ ДВИГАТЕЛЕМ БЕЗ ДАТЧИКА ПОЛОЖЕНИЯ РОТОРА | 2020 |
|
RU2746795C1 |
| Стенд универсальный автоматизированный энергосберегающий | 2024 |
|
RU2840012C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
Изобретение относится к электротехнике, а именно к системам регулируемого электропривода на базе синхронных двигателей с преобразователями частоты (ПЧ). Cпособ стабилизации частоты вращения электродвигателей переменного тока состоит в воздействии на фазовый угол синусоидального напряжения питания, формируемого ПЧ, пропорционально сигналу отклонения мгновенного значения угла нагрузки Θ от его среднего значения за период автоколебаний, обеспечивая его фазовый сдвиг и, тем самым, демпфирование колебаний частоты вращения синхронных электродвигателей. Технический результат заключается в обеспечении эффективного гашения автоколебаний синхронного двигателя без использования датчика положения ротора, в простоте реализации и возможности применения в различных видах ПЧ. 1 ил.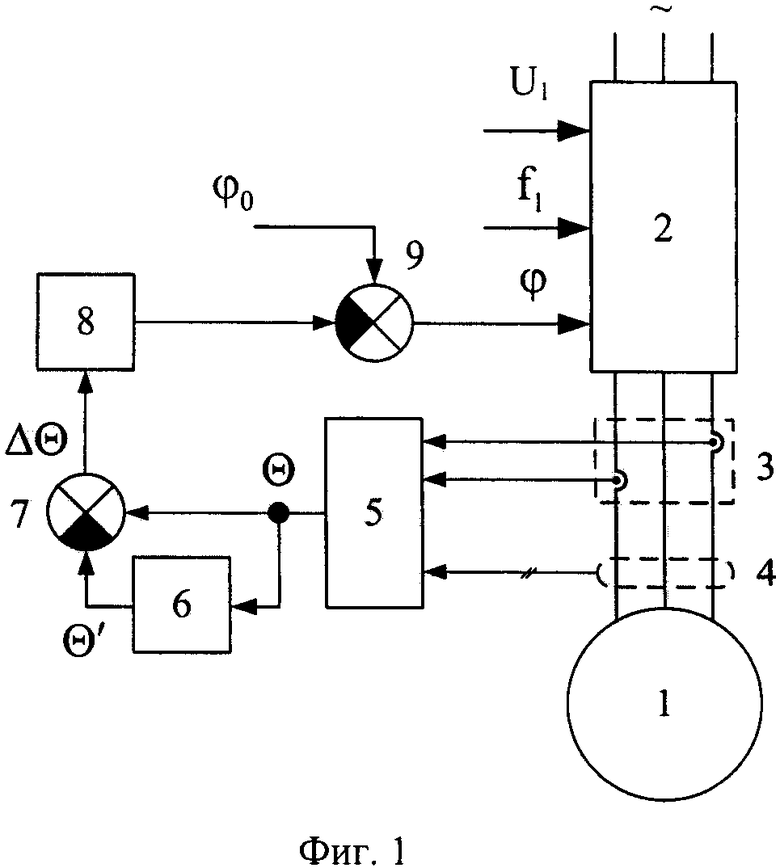
Способ стабилизации частоты вращения синхронного двигателя, питающегося от статического преобразователя частоты, в соответствии с которым изменяют сформированное с помощью инвертора питающее двигатель напряжение посредством отрицательной обратной связи, отличающийся тем, что вычисляют отклонение угла нагрузки от среднего значения за период автоколебаний, определяют корректирующий сигнал, пропорциональный отклонению угла нагрузки от среднего значения, вычитают этот корректирующий сигнал из сигнала задания фазового угла синусоидального напряжения, чем обеспечивают его фазовый сдвиг.
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ ИЗ ПРУЖИННЫХ СТАЛЕЙ МАРТЕНСИТНОГО КЛАССА | 2003 |
|
RU2244757C1 |
| НОВОЕ ДИЗАМЕЩЕННОЕ 1,2,4-ТРИАЗИНОВОЕ СОЕДИНЕНИЕ | 2015 |
|
RU2726410C2 |
| ЗАРЯД СКРЕПЛЕННЫЙ | 2000 |
|
RU2190113C2 |
| US 20100264861 A1, 21.10.2010 | |||
| α- ИЛИ β-ГИДРОКСИКИСЛОТНЫЕ АДДУКТЫ МАСЛА | 2008 |
|
RU2469702C2 |

