Изобретение относится к области электропривода с тяговыми индукторными двигателями.
Известен способ регулирования момента индукторного двигателя («токовый коридор»), заключающийся в том, что внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают импульсы напряжения так, чтобы ток не выходил за рамки «токового коридора», т.е. был приблизительно постоянным (см. Электровозостроение: Сб. науч. тр. ОАО «Всерос. н.-и. и проектно-конструкт. ин-т электровозостроения» (ОАО «ВЭлНИИ»). - 2000. - Т.42 - 324 с. на С.186 и журнал «Электротехника» №6/98, С.25-26, рис.2в и 4б).
В этом способе регулирования изменение  в большом диапазоне при постоянном токе предопределяет большие пульсации момента на валу двигателя, что ведет к преждевременному износу приводного механизма и двигателя, а при использовании индукторного двигателя в качестве тягового провоцирует еще и боксование.
в большом диапазоне при постоянном токе предопределяет большие пульсации момента на валу двигателя, что ведет к преждевременному износу приводного механизма и двигателя, а при использовании индукторного двигателя в качестве тягового провоцирует еще и боксование.
Наиболее близким по технической сущности является способ регулирования индукторного электропривода, заключающийся в том, что формируют токи в двигателе, для чего измеряют периоды датчика положения ротора двигателя, внутри каждого периода датчика положения ротора на фазную обмотку двигателя подают как минимум один импульс напряжения, определяют временной интервал подачи импульсов напряжения, разбивают его на m равных интервалов Δt, соответствующих углу поворота ротора ΔΘ, в начале каждого из которых вводят значение фазного тока in-1, соответствующее началу n-го интервала из m, определяют величину фазного тока in по формуле

где М3(Θn) - заданное значение момента на n-м интервале;
L(Θn, in-1) - значение индуктивности в конце n-го интервала при токе in-1;
L(Θn-1, in-1) - значение индуктивности в конце (n-1)-го интервала при токе in-1;
in-1 - значение фазного тока в конце (n-1)-го интервала, формируют импульс напряжения амплитудой U от начала текущего n-го интервала до момента достижения фазным током величины in, причем если в начале n-го интервала значение фазного тока больше значения in, то импульс напряжения не формируют (см. описание изобретения к патенту Российской Федерации RU 2229194 С2, кл. 7 Н02Р 8/18, опубл. 20.05.2004. Бюл. №14).
Этот способ регулирования момента имеет следующие недостатки. Формирование импульса напряжения от начала n-го интервала до момента превышения фазным током значения in может привести к несоответствию фазного тока значению in в конце n-го интервала, а если в начале n-го интервала при превышении фазным током значения in импульс напряжения не формировать, то значение тока в конце n-го интервала может оказаться меньше in и изменение электромагнитной энергии в конце n-го интервала может не соответствовать поддержанию заданного момента двигателя. Поэтому среднее значение момента на интервале ΔΘ также может не соответствовать заданному, что предопределяет пульсации момента электропривода.
Особенно это сказывается при высоких скоростях электропривода, т.к. число m уменьшается из-за сокращения величины периода датчика положения ротора двигателя при прежнем времени переключения вентилей инвертора электропривода. Эти пульсации момента, а также резкие изменения заданного момента М3 в процессе регулирования в сочетании с присущими индукторному приводу мягкими (см. с.193, рис.1 Электровозостроение: Сб. науч. тр. ОАО "ВЭлНИИ". - 2000. - Т.42 - 324 с.) тяговыми характеристиками приводят к низким противобоксовочным свойствам индукторного тягового электропривода.
Задачей изобретения является улучшение противобоксовочных свойств индукторного электропривода за счет исключения резкого изменения заданного момента двигателя и повышения жесткости тяговых характеристик.
Поставленная задача решается способом регулирования момента тягового индукторного электропривода, при котором формируют токи в фазах индукторного двигателя, для чего измеряют периоды датчика положения ротора двигателя, внутри каждого периода датчика положения ротора определяют временной интервал подачи импульсов напряжения на фазную обмотку двигателя, разбивают его на m равных интервалов Δt, соответствующих углу поворота ΔΘ, и определяют среднюю величину момента индукторного двигателя в предыдущем периоде датчика положения ротора по формуле
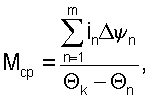
где Δψn=ψ(in, Θn)-ψ(in-1, Θn-1);
ψ(in-1, Θn-1) - значение потокосцепления в начале n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
ψ(in, Θn) - значение потокосцепления в конце n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
in-1 - значение фазного тока в начале n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
in - значение фазного тока в конце n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
Θn-1 - значение угла поворота ротора индукторного двигателя в начале n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
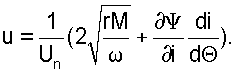
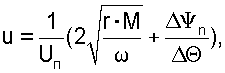
Θn - значение угла поворота ротора индукторного двигателя в конце n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора. Затем определяют и вводят в задатчик интенсивности разность между заданным М3 и средним Мср значениями момента, в зависимости от знака этой разности увеличивают или уменьшают значение момента М на выходе задатчика интенсивности, определяют относительную ширину импульса питающего напряжения на n-м интервале текущего периода датчика положения ротора индукторного двигателя по формуле
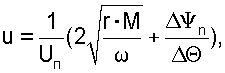
где UП - напряжение питания;
r - активное сопротивление фазной обмотки;
ω - частота вращения ИД,
и формируют импульс напряжения на фазной обмотке амплитудой UП, начало которого соответствует углу поворота ротора индукторного двигателя от начала n-го интервала 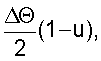 а конец -
а конец - 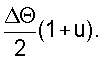
Заданное значение момента можно не задавать директивно, а формировать регулятором скорости электропривода, что повысит жесткость его тяговых характеристик.
Момент, развиваемый фазной обмоткой индукторного двигателя (ИД), определяется изменением электромагнитной энергии в зависимости от угла поворота ротора

где i - ток фазной обмотки;
ψ - потокосцепление фазной обмотки.
Потокосцепление фазной обмотки определяется уравнением
 ,
,
где U - напряжение на фазной обмотке;
r - активное сопротивление фазной обмотки;
ω - частота вращения ИД.
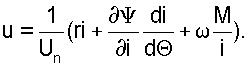
Относительное значение напряжения, равное отношению напряжения на фазной обмотке к напряжению питания ИД Un, равно  Имеем
Имеем

Подставляя (2) в (1),

Для минимизации пульсаций момента тягового индукторного привода (ТИП) необходимо определить управление u(Θ) так, чтобы функционал
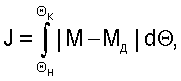
где М - заданное значение момента на выходе задатчика интенсивности ТИП;
ΘН - начальное значение угла поворота ротора двигателя;
ΘК - конечное значение угла поворота ротора двигателя,
имел минимальное значение, т.е. М-МД=0 на всем интервале [ΘН, Θк].
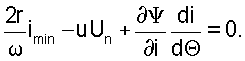
Тогда, с учетом (3)

Отсюда имеем соотношение между фазным током и фазным напряжением, обеспечивающее минимальные пульсации момента
Уравнение

описывает параболу, ветви которой направлены вверх.
Координаты вершины параболы

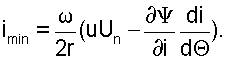
Требование J=0 определяет другую координату вершины: парабола должна касаться вершиной оси i, т.е. дискриминант уравнения (4) должен быть равен нулю:

отсюда получим необходимое управление u (Θ)
Величина  соответствует коэффициенту заполнения при импульсном регулировании напряжения и определяет среднее значение напряжения и длительность импульса напряжения питания Un ИД на интервале переключения вентилей инвертора. Так как это среднее напряжение определяет среднее значение тока на интервале переключения вентилей инвертора, то, очевидно, импульс напряжения амплитудой Un необходимо ориентировать симметрично относительно концов этого интервала.
соответствует коэффициенту заполнения при импульсном регулировании напряжения и определяет среднее значение напряжения и длительность импульса напряжения питания Un ИД на интервале переключения вентилей инвертора. Так как это среднее напряжение определяет среднее значение тока на интервале переключения вентилей инвертора, то, очевидно, импульс напряжения амплитудой Un необходимо ориентировать симметрично относительно концов этого интервала.
Учитывая, что относительная величина напряжения u соответствует относительной длительности импульса напряжения амплитудой UП на интервале ΔΘ, начало импульса отстоит от начала n-го интервала на 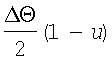 , а конец - на
, а конец - на 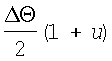 .
.
Подача и прекращение импульса напряжения в определенные моменты времени обеспечивает изменение электромагнитной энергии для поддержания необходимого момента М на всех интервалах ΔΘ, а наличие задатчика интенсивности изменения необходимого момента и регулятора скорости повышает жесткость тяговых характеристик привода, что улучшает его противобоксовочные свойства.
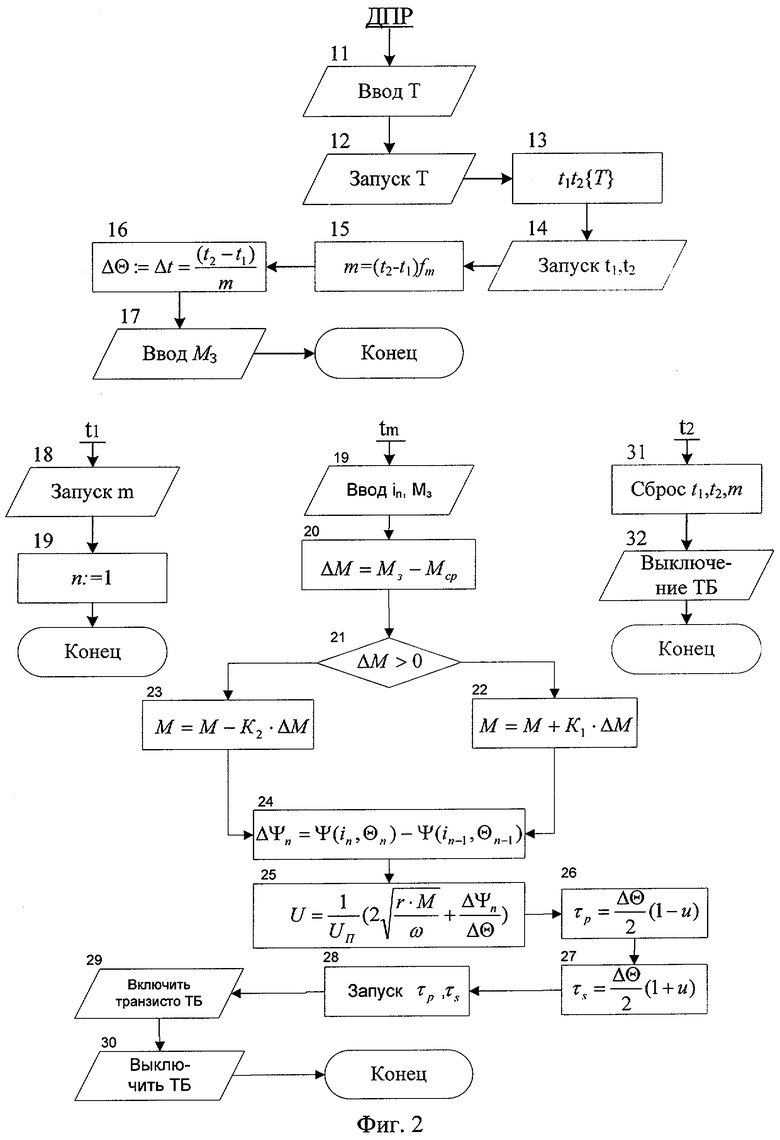
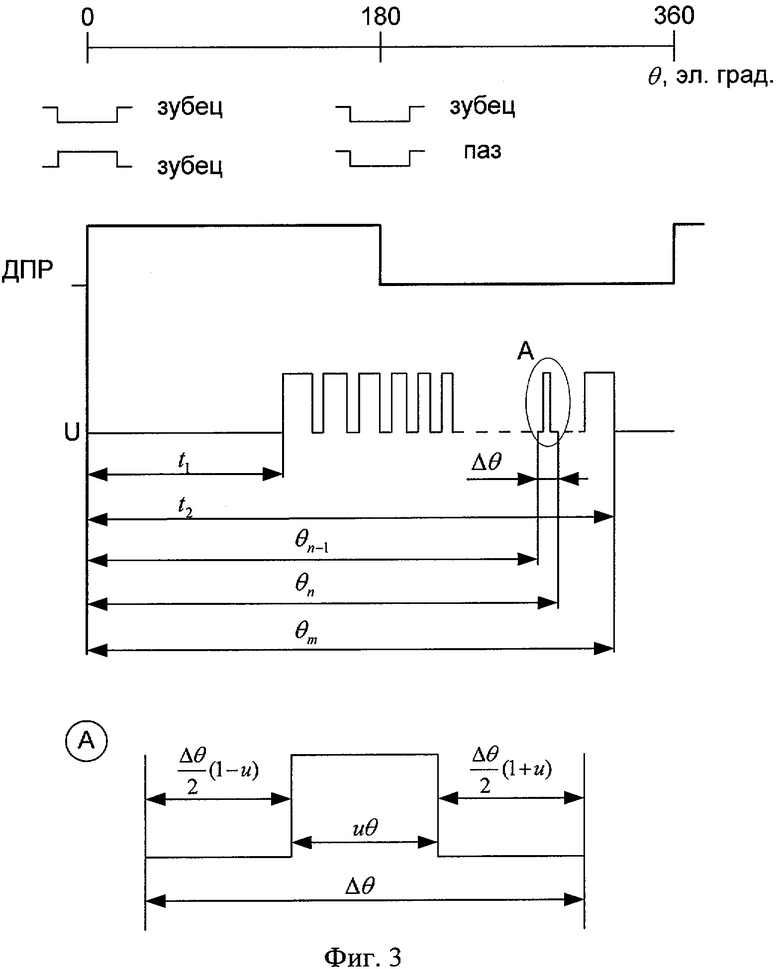
На фиг.1 представлено устройство для реализации способа; на фиг.2 - алгоритм работы устройства; на фиг.3 - временные диаграммы, поясняющие определение моментов времени подачи напряжения на фазную обмотку.
Способ осуществляется микропроцессорной системой, состоящей из блока таймеров 1, процессора 2, оперативного запоминающего устройства (ОЗУ) 3, постоянного запоминающего устройства (ПЗУ) 4, аналогово-цифрового преобразователя (АЦП) 5, блока драйверов 6, транзисторного блока 7, управляющего индукторным двигателем 8, имеющим датчики положения ротора (ДПР) 9. Входы-выходы процессора 2, ОЗУ 3, ПЗУ 4, входы блока таймеров 1, блока драйверов 6 и выход АЦП 5 объединены шиной адресов-данных 10. Выходы блока таймеров 1 и ДПР 9 соединены с шинами прерывания процессора 2. Ток i двигателя 8 поступает на вход АЦП 5. Выходы транзисторного блока 7, запитанного постоянным напряжением u, нагружены на обмотки индукторного двигателя 8.
Процессор, ОЗУ, ПЗУ, блок таймеров, АЦП могут быть интегрированы в специализированный контроллер, например М167-1С (см. каталог продукции «Бортовая промышленная электроника» АО «Каскод», 105037, Москва, Измайловская пл., 7).
Способ реализуется в соответствии с алгоритмом на фиг.2.
Алгоритм состоит их 4-х подпрограмм, которые запускают сигналами прерываний от ДПР 9 и блока таймеров 1-t1, t2, tm.
Первая подпрограмма начинается по сигналу ДПР. Вводят значение кода из таймера Т, соответствующее периоду сигнала ДПР (блок 11), и снова запускают таймер Т (блок 12). Затем определяют временной интервал [t1, t2] (блок 13) и запускают таймеры t1 и t2 в блоке таймеров 1 (блок 14). В блоке 15 определяется количество интервалов m умножением временного интервала [t1, t2] на значение максимально допустимой частоты переключения транзисторов транзисторного блока 7. Затем в блоке 16 определяют величину интервала Δt повторения определения необходимого импульса напряжения и соответствующий Δt угол поворота ротора ΔΘ.
Вторая подпрограмма начинается по приходу сигнала таймера t1, запущенного в первой подпрограмме.
В этой подпрограмме запускают таймер m интервала повторения вычислений (блок 17) и номеру интервала повторения вычислений присваивается значение единицы (блок 18).
Таймер m периодически выдает сигналы прерываний, по которым выполняется третья подпрограмма, в которой определяют необходимые моменты времени подачи импульса напряжения питания на фазную обмотку индукторного двигателя на каждом n-м интервале из m. Для этого в блоке 19 вводят значение тока in, соответствующее началу n-го интервала, и заданное значение момента электропривода. Затем в блоке 20 определяют разность ΔM между заданным М3 и средним моментом Мср и вводят в задатчик интенсивности, реализованный в блоках 21, 22, 23. Коэффициенты K1 и К2 определяют интенсивность нарастания и спада момента индукторного двигателя. В блоке 24 определяют изменение потокосцепления за интервал угла поворота ротора ΔΘ, а в блоке 25 определяют необходимую относительную величину u напряжения на n-м интервале. Блоки 26, 27 предназначены для определения моментов времени подачи τр и спада τs импульса напряжения питания UП, после чего запускают таймеры отсчета этих времен (блок 28). По истечении времени τр транзисторы транзисторного блока 7 включают, подавая на фазную обмотку двигателя напряжение питания UП (блока 29), а в момент времени τs транзисторы блока 7 выключают, снимая с фазной обмотки UП (блока 30), после чего подпрограмма заканчивается.
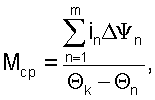
Подачу импульсов управления прекращают четвертой подпрограммой с приходом сигнала прерывания от таймера t2, при этом осуществляют сброс всех таймеров (блок 31), выключают транзисторный блок 7 (блок 32) и определяют среднее за период ДПР значение момента по формуле
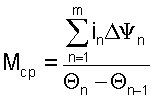
для регулирования в следующем периоде ДПР.
Формирование заданного момента легко можно реализовать регулятором скорости, имея сигнал датчика положения ротора ДПР, что дополнительно повысит жесткость тяговых характеристик электропривода.
Предлагаемый способ за счет снижения пульсаций момента тягового индукторного двигателя и повышения жесткости тяговых характеристик электропривода повышает противобоксовочные свойства привода, в том числе и от синхронного боксования. Кроме того, реализация способом обратной связи по моменту двигателя позволяет легко осуществить выравнивание нагрузок в групповом тяговом приводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2314634C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2297091C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294049C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2251788C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2276451C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2004 |
|
RU2282300C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
Изобретение относится к области электротехники и может быть использовано на электроподвижном составе для управления индукторными электродвигателями, в частности тяговыми вентильно-индукторными электродвигателями. Техническим результатом является улучшение противобоксовочных свойств тягового индукторного электропривода за счет повышения жесткости тяговых характеристик и среднего значения момента двигателя, а также формированием необходимой длительности и ориентации импульса напряжения на фазной обмотке двигателя. В способе регулирования момента в зависимости от знака разности между заданным и средним значениями момента изменяют значение момента на выходе задатчика интенсивности. Определяют ширину импульса питающего напряжения в зависимости от величины момента и формируют импульс на фазной обмотке, начало и конец которого определяют в соответствии с углом поворота ротора индукторного двигателя. 1 з.п. ф-лы, 3 ил.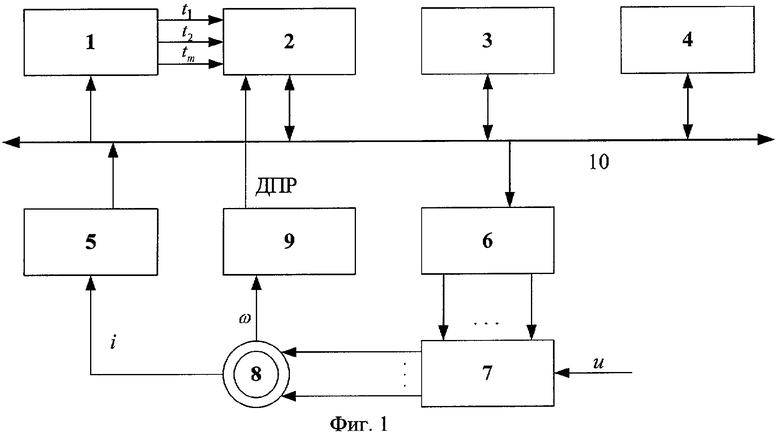
где Δψn=ψ(in, Θn)-ψ(in-1, Θn-1);
ψ(in-1, Θn-1) - значение потокосцепления в начале n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
ψ(in, Θn) - значение потокосцепления в конце n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
in-1 - значение фазного тока в начале n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
in - значение фазного тока в конце n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
Θn-1 - значение угла поворота ротора индукторного двигателя в начале n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора;
Θn - значение угла поворота ротора индукторного двигателя в конце n-го интервала угла поворота ротора в предыдущем периоде датчика положения ротора, определяют и вводят в задатчик интенсивности разность между заданным М3 и средним Мср значениями момента, в зависимости от знака этой разности увеличивают или уменьшают значение момента М на выходе задатчика интенсивности, определяют относительную ширину импульса питающего напряжения на n-м интервале текущего периода датчика положения ротора индукторного двигателя по формуле
где UП - напряжение питания;
r - активное сопротивление фазной обмотки;
ω - частота вращения ИД,
и формируют импульс напряжения на фазной обмотке амплитудой UП, начало которого соответствует углу поворота ротора индукторного двигателя от начала n-го интервала 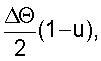 а конец -
а конец - 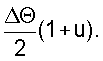
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2229194C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2118039C1 |
| Устройство для управления бесконтактным двигателем постоянного тока | 1988 |
|
SU1713038A1 |
| US 5015939 A1, 14.05.1991 | |||
| DE 3826892 A1, 12.03.1989 | |||
| JP 62272851 A, 27.11.1987 | |||
| Шихта для наплавки | 1974 |
|
SU500950A1 |
| WO 8802952 А1, 21.04.1988. | |||

