Изобретение относится к области электротехники и может быть использовано для создания регулируемых электроприводов с многофазными синхронными двигателями, не имеющими датчика положения ротора, при питании двигателей от преобразователей частоты (ПЧ) с инверторами напряжения, регулируемыми методом широтно-импульсной модуляции (ШИМ).
В известном способе управления частотой вращения синхронного двигателя без датчика положения ротора по патенту РФ 2414047 «Способ и управляющее устройство для управления электродвигателем с внутренними постоянными магнитами» управление инверторным каскадом преобразователя частоты (ПЧ) осуществляется по результатам измерений фазных противо-ЭДС двигателя в интервалах, когда токи фаз равны нулю (в интервалах «бестоковых пауз»).
Недостатком способа по патенту РФ 2414047 является то, что при таком управлении выходной каскад ПЧ используется как инвертор тока и работа с бестоковыми паузами возможна только в режиме перевозбуждения двигателя, когда коэффициент мощности двигателя (cosϕ) меньше единицы, поэтому КПД двигателя понижен. Кроме того, при таком способе управления высшие гармоники фазных токов создают большие потери в роторе.
В случаях использования в регулируемом электроприводе с синхронным двигателем инвертора напряжения для уменьшения потерь в двигателе формирование выходного напряжения инвертора осуществляется методом синусоидальной широтно-импульсной модуляции (синусоидальной ШИМ). При этом устойчивая работа привода возможна только в том случае, когда фазный сдвиг (угол нагрузки Θ) основных гармоник фазных напряжений инвертора по отношению к фазным противо-ЭДС двигателя находится в определенных пределах. Для выполнения этого условия необходимо знать «положение ротора» (угол нагрузки Θ). Если у двигателя нет датчика положения ротора, положение ротора вычисляется по параметрам электрической схемы замещения.
В известном способе регулирования скорости многофазных двигателей, не имеющих датчиков положения ротора (патент РФ 2481694 «Устройство управления и способ управления вращающейся электрической машины») управление осуществляется исходя из оценки углового положения ротора (угла нагрузки Θ) по значениям «тестовых токов» в фазах двигателя, создаваемых «тестовыми напряжениями», формируемыми, генератором оценки положения, добавляемыми к напряжениям несущей частоты ШИМ
Недостаток известного способа по патенту РФ 2481694 состоит в том, что за счет тестовых напряжений искажаются выходные напряжения ПЧ и в токах фаз двигателя появляются дополнительные гармонические составляющие, повышающие нагревы и снижающие КПД.
В качестве прототипа выбран способ регулирования скорости многофазных двигателей, не имеющих датчиков положения ротора (патент РФ 2428784 «Способ бездатчиковой оценки углового положения ротора многофазного электродвигателя»). При использовании этого способа оценка углового положения ротора (угла нагрузки Θ) осуществляется на каждом шаге расчетов фазных противо-ЭДС, определяемых по полной схеме замещения при измеренных токах фаз. При расчетах используется метод последовательного приближения, реализуемый в алгоритме «фильтра Калмана».
Недостаток известного способа - прототипа по патенту РФ 2428784 состоит в необходимости выполнения на каждом шаге расчетов большого количества вычисления по алгоритму фильтра Калмана. а также в том, что результаты указанных расчетов могут иметь большие отклонения потому, что электрические параметры двигателя во многом зависят от режима работы: активные сопротивления R изменяются с изменениями температуры, а индуктивные сопротивления X (X=2π⋅f⋅L) зависят от степени насыщения магнитной цепи двигателя. В известных источниках, например в книге Ю.Н. Калачева «Наблюдатели состояния в векторном электроприводе». Изд. Москва. 2015 г., показано, что точность расчетов углового положения ротора но параметрам полной электрической схемы замещения можно повысить путем выполнения дополнительных расчетов для коррекции параметры схемы замещения. Однако даже это увеличение объема расчетов не гарантирует снижение ошибки в оценке углового положения ротора.
Другой недостаток известного способа-прототипа состоит в том, что для его реализации необходимо «мощное» вычислительное устройство - компаратор с большим объемом оперативной памяти и высокой тактовой частотой, стоимость которого может быть сопоставима со стоимостью электропривода.
Задачей предлагаемого изобретения является улучшение технико-экономических показателей: уменьшение массы и габаритов, снижение стоимости вычислительного устройства, входящего в состав блока управления, за счет значительного снижения числа вычислительных операций на каждом шаге корректировки выходного напряжения инвертора и тока возбуждения в случае использования в электроприводе двигателя с электромагнитным возбуждением.
Раскрытие изобретения
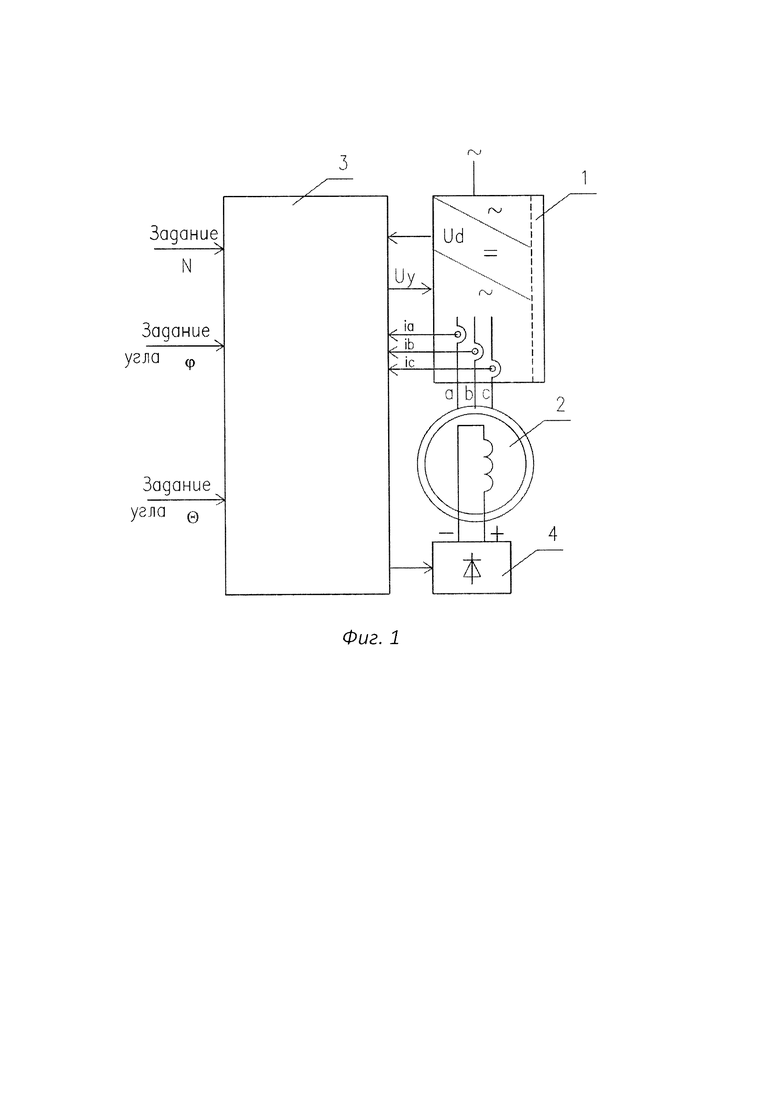
Структурная схема электропривода, в котором реализуется предлагаемое изобретение, приведена на фиг. 1. В состав электропривода входя т преобразователь частоты 1 с инвертором напряжения на выходе, синхронный двигатель 2 и блок управления инвертора 3. В случае электромагнитного возбуждения двигателя в состав электроприводе должен входить регулятор тока возбуждения 4. В состав преобразователя частоты должны входить датчик напряжения цепи постоянного тока на входе инвертора Ud и датчики фазных токов iA, iB, iC. Сигналы этих датчиков должны подаваться на входы блока 3. Кроме того, на входы блока 3 должны подаваться сигналы задания частоты вращения n (об/мин), определяющей частоту фазных токов исходя из значения числа пар полюсов двигателя р (f=р⋅n/60), сигнал, задающий предельное значение угла Θ и, в случае электромагнитного возбуждения двигателя, сигнал оптимальной величины угла ϕ. С выходов блока 3 на инвертор 2 должны подаваться сигналы Uya, Uyb, Uyc для формирования фазных напряжений методом ШИМ и сигналы управления регулятором тока возбуждения 4.
Поставленная задача решается благодаря тому, что в способе частотного управления электроприводом с синхронным двигателем без датчика положения ротора текущие значения функции угла ϕ вычисляется по уравнению:

Р=iA ⋅ cosωt + iB ⋅ cos(ωt - 2π/3) + iC cos(ωt + 2π/3),
Q=iA ⋅ sinωt + iB ⋅ sin(ωt - 2π/3) + iC sin(ωt + 2π/3),
iA, iB, iC - мгновенные значения фазных токов двигателя,
ω=2π ⋅ f - угловая скорость, при частоте основной волны, фазных токов f,
t - текущее время,
f - частота основной волны фазного тока, вычисляются по значению числа пар полюсов двигателя р и по заданной частоте вращения n (об/мин) по формуле (f=(p⋅n/60):
Таким образом, для вычислений функции угла сдвига фаз ϕ по (1) не нужны параметры электрической схемы замещения двигателя, расчеты выполняются по простым уравнениям, поэтому в блоке управления можно использовать вычислительное устройство с невысокой тактовой частотой и небольшим объемом оперативной памяти.
Текущие значения угла нагрузки Θ определяется в результате решения уравнения:

где:
Uф - эффективное значение основной волны фазного напряжения, определяемое по значению напряжения на входе инвертора Ud, по значению коэффициента модуляции μ и коэффициента схемы Ксх (Uф=Кcx ⋅ μ ⋅ Ud).
Iф - эффективное значение основной волны фазного тока
Iф=2((iA - iB/2 - iC/2)2+(-iB ⋅ 1,73/2+iC ⋅ 1,73/2)2)0,5/3,
Xq=ω⋅Lq - полное синхронное индуктивное сопротивление двигателя по поперечной оси ротора.
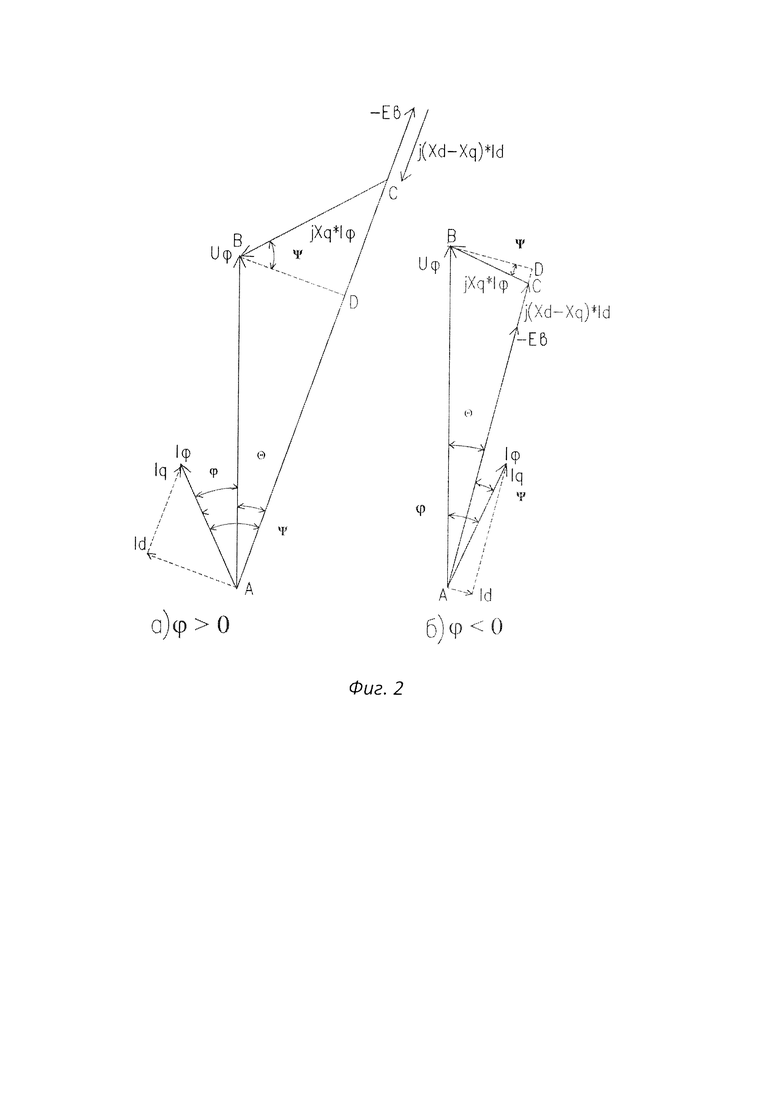
Для пояснения уравнения (2) на фиг. 2 приведены общеизвестные векторные диаграммы токов и напряжений синхронного двигателя (А.И. Вольдек «Электрические машины», Ленинград, «Энергия». 1978, стр. 744) для режимов на ϕ>0 (фиг. 2а) и ϕ<0 (фиг. 2б) без учета падения напряжения на активном сопротивлении фазы статора. На диаграммах напряжений показаны два треугольника: ABD и BCD. Согласно приведенным диаграммам катет BD треугольника ABD пропорционален Uф⋅sinΘ. В треугольнике BCD катет BD пропорционален Iф ⋅ Xq ⋅ cosΨ, а, согласно диаграммам, Ψ=ϕ+Θ.
Согласно (2) угол Θ вычисляется в результате решения алгебраического уравнения, в которое входит только один электрический параметр двигателя - полное синхронное индуктивное сопротивление двигателя по поперечной оси ротора Xq. Из-за большого немагнитного зазора по поперечной оси ротора этот параметр мало зависит от насыщения магнитной цепи двигателя.
Таким образом, данные по требуемым корректировкам выходного напряжения преобразователя частоты и тока возбуждения, в случае использования в электроприводе двигателя с электромагнитным возбуждением, в зависимости от отклонений ϕ и Θ от заданных значений, определяются в результате нескольких алгебраических расчетов, для которых можно использовать дешевое вычислительное устройство с небольшой массой и габаритами, что снижает стоимость блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления синхронным электродвигателем | 2019 |
|
RU2724603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2584142C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2085017C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2012 |
|
RU2494518C1 |
| СПОСОБ ПУСКА И САМОЗАПУСКА СИНХРОННОГО ДВИГАТЕЛЯ | 1992 |
|
RU2014720C1 |
| ВЫСОКОВОЛЬТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ МОЩНОГО ЭЛЕКТРОДВИГАТЕЛЯ, ИМЕЮЩЕГО ОДНУ ИЛИ НЕСКОЛЬКО ТРЕХФАЗНЫХ ОБМОТОК (ЕГО ВАРИАНТЫ) | 2005 |
|
RU2295824C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2362264C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОГО СОПРОТИВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА | 2001 |
|
RU2193212C1 |
Изобретение относится к области электротехники и может быть использовано для создания регулируемых электроприводов с многофазными синхронными двигателями, не имеющими датчика положения ротора, при питании двигателей от преобразователей частоты (ПЧ) с инверторами напряжения, регулируемыми методом широтно-импульсной модуляции (ШИМ). Техническим результатом является уменьшение массы и габаритов вычислительного устройства, входящего в состав блока управления, за счет значительного снижения числа вычислительных операций на каждом шаге корректировки выходного напряжения инвертора и тока возбуждения в случае использования в электроприводе двигателя с электромагнитным возбуждением. При частотном управлении электроприводом с синхронным двигателем, не имеющим датчик положения ротора, основные гармоники выходных напряжений фаз преобразователя частоты, регулируемого методом широтно-импульсной модуляции, следует изменять прямо пропорционально частоте фазных токов f с корректировкой падений напряжения на активных сопротивлениях фаз двигателя и с учетом отклонения угла сдвига между основными гармониками фазных токов и фазных напряжений (угла ϕ) от заданного значения при одновременном контроле устойчивости путем вычислений текущего значения угла нагрузки (угла Θ). Ток возбуждения синхронного двигателя с электромагнитным возбуждением следует регулировать по отклонению коэффициента мощности двигателя, определяемого по основным гармоникам фазных токов и напряжений, от заданного значения. 2 ил.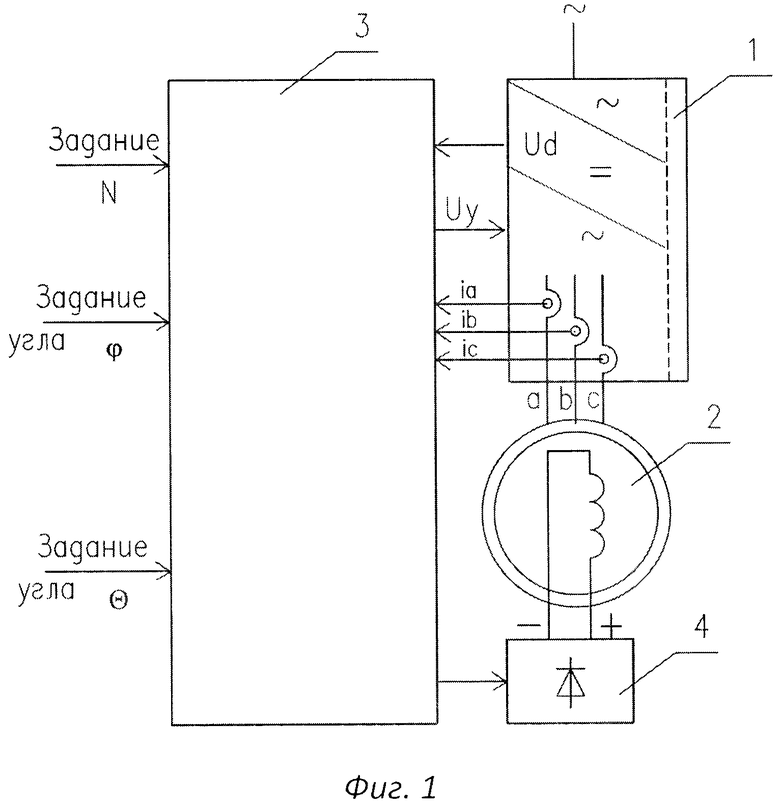
Способ частотного управления электроприводом, в состав которого входят трехфазный синхронный двигатель, преобразователь частоты (ПЧ) с выходным инвертором напряжения, регулируемым методом синусоидальной широтно-импульсной модуляции (ШИМ), оснащенный датчиками токов фаз статора, датчиком входного напряжения инвертора и блоком управления, отличающийся тем, что в блоке управления вычисляется функция угла сдвига фаз ϕ между фазным током и фазным напряжением по уравнению
sinϕ = Q/(P2 + Q2)0,5,
где Р, Q - условные мощности, определяются по формулам
Р = iA ⋅ cosωt + iB ⋅ cos(ωt - 2π/3) + iC ⋅ cos(ωt + 2π/3),
Q = iA ⋅ sinωt + iB ⋅ sin(ωt - 2π/3) + iC ⋅ sin(ωt + 2π/3),
где iA, iB, iC - измеряемые мгновенные значения фазных токов,
ω - угловая скорость, вычисляется по формуле ω = 2π ⋅ f,
t - текущее время,
f - частота основной волны фазного тока, вычисляется по значению числа пар полюсов двигателя р и по заданной частоте вращения n (об/мин) по формуле f = (p ⋅ n/60);
а также в блоке управления вычисляется угол нагрузки Θ из уравнения
Uф ⋅ sinΘ = Iф ⋅ Хq ⋅ соs(ϕ + Θ),
где Uф - эффективное значение основной волны фазного напряжения, определяется по значению напряжения на входе инвертора Ud, по значениям коэффициента модуляции μ и коэффициента схемы Ксх (Uф = Ксх ⋅ μ ⋅ Ud),
Iф - эффективное значение основной волны фазного тока, определяется по формуле
Iф = 2((iA - iB/2 - iC/2)2 + (- iB ⋅ 1,73/2 + 1,73/2)2)0,5/3,
Xq - полное синхронное индуктивное сопротивление двигателя по поперечной оси ротора, вычисляется по значению индуктивности двигателя по поперечно оси Lq по формуле
Xq = ω ⋅ Lq;
а также выходные напряжения фаз инвертора Uф изменяются пропорционально частоте фазных токов f с корректировкой падений напряжения на активных сопротивлениях фаз и с учетом отклонения угла Θ от заданной предельной величины, а ток возбуждения двигателя с электромагнитным возбуждением корректируется по отклонению угла сдвига фаз ϕ, определяющего коэффициент мощности, от заданного оптимального значения.
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| WO 2010109520 A1, 30.09.2010 | |||
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| DE 102010008500 A1, 02.09.2010 | |||
| EP 1944860 A1, 16.07.2008. | |||

