Ссылка на родственные заявки
Настоящая заявка претендует на приоритет предварительной заявки на патент С.Ш.А 62/146,880 «Способ и система круиз-контроля транспортного средства», поданной 13 апреля 2015 года, содержание которой в полном объеме и во всех отношениях включено в настоящее изобретение путем ссылки.
Область техники, к которой относится изобретение
Настоящее открытие в целом относится к способам и системам управления скоростью движения транспортного средства, работающего в режиме круиз-контроля, когда водителем запрашивается автоматическое управление скоростью движения транспортного средства.
Уровень техники/Раскрытие изобретения
Управление скоростью движения транспортного средства может вестись автоматически с выдерживанием требуемой скорости посредством контроллера с незначительным участием водителя транспортного средства. Одним примером регулирования контроллером скорости движения транспортного средства является эксплуатация транспортного средства в режиме круиз-контроля. Режим круиз-контроля может быть описан как режим эксплуатации транспортного средства, в котором скорость его движения выдерживают в требуемом скоростном диапазоне, ограниченном верхней и нижней пороговыми скоростями, без того, чтобы водителю было нужно запрашивать крутящий момент от источника двигательной энергии транспортного средства. Контроллер выдерживает скорость движения транспортного средства в пределах требуемого скоростного диапазона, регулируя выходной крутящий момент источника двигательной энергии транспортного средства. То есть, скорость движения транспортного средства выдерживается в требуемом скоростном диапазоне за счет увеличения и уменьшения выходного крутящего момента источника двигательной энергии транспортного средства. Одним из путей выдерживания скорости движения транспортного средства является пропорциональное регулирование выходного крутящего момента источника двигательной энергии в зависимости от отклонения скорости движения транспортного средства. Для регулирования выходного крутящего момента источника двигательной энергии и выдерживания скорости движения в пределах требуемого скоростного диапазона контроллер может применять алгоритм ПИД-регулятора (пропорционально-интегрально-дифференциального управления) или какой-либо схожий вариант. Тем не менее, алгоритмы ПИД-управления скоростью движения транспортного средства являются слишком быстрыми в том, что для выдачи скорректированной траектории скорости они преимущественно основываются на существующем или текущем отклонении скорости. В результате, и так как в режиме круиз-контроля транспортные средства часто работают на высоких передачах трансмиссии, контроллер может значительно менять крутящий момент, запрашиваемый от источника двигательной энергии транспортного средства. Колебания запрошенного крутящего момента могут повысить расход топлива транспортного средства и беспокоить водителя.
Авторы настоящего изобретения выявили вышеуказанную проблему и разработали систему транспортного средства, содержащую: транспортное средство, содержащее источник двигательной энергии; и контроллер в транспортном средстве, содержащий хранящиеся в долговременной памяти исполняемые инструкции, включающие в себя алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью.
Путем адаптации моделей транспортного средства и подачи выходной информации из адаптированных моделей транспортного средства в алгоритм упреждающего круиз-контроля с нелинейной моделью, можно обеспечить технический результат, состоящий в уменьшении колебаний запрашиваемого крутящего момента при эксплуатации транспортного средства в режиме круиз-контроля. Колебания крутящего момента могут быть уменьшены, по меньшей мере, частично, на основе априорной информации об уклоне дороги. Кроме того, адаптация модели транспортного средства и модели расхода топлива транспортного средства в реальном масштабе времени при работе транспортного средства в режиме круиз-контроля позволяет режиму упреждающего круиз-контроля с нелинейной моделью изменять стратегию управления крутящим моментом с выдачи постоянного крутящего момента на выдачу крутящего момента типа «разгон-накат», тем самым допуская множественные стратегии решения крутящего момента контроллером для одних и тех же условий движения, исключая изменения модели расхода топлива транспортного средства в результате изменения свойств топлива или других изменений характеристик работы двигателя. Поэтому оптимальная стратегия экономии топлива выбирается автоматически по фактической характеристики модели расхода топлива транспортного средства.
Настоящее изобретение может обеспечить ряд преимуществ. В частности, подход может снизить вероятность слишком больших изменений запроса крутящего момента для выдерживания скорости движения транспортного средства. Кроме того, подход может снизить затраты на эксплуатацию транспортного средства за счет снижения расхода топлива. Кроме того, подход еще более может снизить расход топлива, активно запрашивая переключение трансмиссии в нейтральное положение при эксплуатации транспортного средства в режиме круиз-контроля.
Вышеприведенные и другие преимущества, а также отличительные признаки настоящего раскрытия станут очевидными из нижеследующего раздела «Осуществление изобретения», будучи рассмотренного отдельно или в связи с сопроводительными чертежами.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут описаны подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 показан пример транспортного средства, которое может быть включено в раскрываемые здесь системы и способы;
На фиг. 2 показано приведенное в качестве примера транспортное средство и его электронный горизонт;
На фиг. 3 показан источник двигательной энергии приведенного в качестве примера транспортного средства;
На фиг. 4 показана линия привода приведенного в качестве примера транспортного средства, содержащая источник двигательной энергии транспортного средства;
На фиг. 5 показана блок-схема системы круиз-контроля приведенного в качестве примера транспортного средства;
На фиг. 6А и фиг. 6В показан пример способа упреждающего круиз-контроля с адаптивной нелинейной моделью с оптимизацией расхода топлива и возможным выбором нейтрального положения трансмиссии;
На фиг. 7 подробно показан пример способа оптимизации упреждающего круиз-контроля с нелинейной моделью, именуемого итерациями последовательного квадратичного программирования (ПКП);
На фиг. 8 подробно показан пример способа упреждающего круиз-контроля с нелинейной моделью с оптимизацией расхода топлива и выбором нейтрального положения трансмиссии;
На фиг. 9А и 9В показаны примеры моделей расхода топлива транспортного средства; и
На фиг. 10 показан пример последовательности круиз-контроля с выбором нейтрального положения трансмиссии.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам улучшения эксплуатации транспортного средства в режиме круиз-контроля. На фиг. 1 показан неограничивающий пример транспортного средства для работы в режиме круиз-контроля, в котором контроллер применяет алгоритм упреждающего круиз-контроля с нелинейной моделью. На фиг. 2 показан пример транспортного средства и электронного горизонта, обеспечивающего входной информацией алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью. На фиг. 3 и 4 показаны неограничивающие примеры источников двигательной энергии в линии привода транспортного средства. На фиг. 5 показана блок-схема примера системы круиз-контроля транспортного средства. На фиг. 6А - фиг. 8 представлены способы эксплуатации транспортного средства в режиме круиз-контроля, включая одну приведенную в качестве примера версию алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью. На фиг. 9А и фиг. 9В показаны примеры моделей расхода топлива источника двигательной энергии транспортного средства. На фиг. 10 представлен пример последовательности работы транспортного средства в режиме круиз-контроля.
Согласно иллюстрации на фиг. 1, транспортное средство 100 содержит контроллер 12, предназначенный для того, чтобы принимать данные от датчиков и регулировать исполнительные устройства. Контроллер 12 может управлять транспортным средством в режиме круиз-контроля, в котором скорость движения транспортного средства выдерживается в требуемом скоростном диапазоне, ограниченным верхней и нижней пороговыми скоростями. В некоторых примерах, для управления транспортным средством 100 контроллер 12 может взаимодействовать с другими контроллерами. Транспортное средство 100 показано с приемником 100 системы глобального позиционирования (GPS). Спутник 102 снабжает приемник 130 GPS-информацией с отметками даты и времени, и данная информация приемником передается системе 140 определения местоположения транспортного средства. Система 140 определения местоположения транспортного средства передает контроллеру данные о текущем и предстоящем уклоне дороги. Транспортное средство 100 может быть также оборудовано опциональной камерой 135 для исследования дорожных условий на маршруте следования транспортного средства 100. Например, камера 135 может собирать информацию о дорожных условиях с дорожных знаков 166 или табло. Система 140 определения местоположения транспортного средства альтернативно может получать информацию для определения местоположения транспортного средства через приемник 132 от стационарной вещательной башни 104. В некоторых примерах, транспортное средство 100 может также содержать датчик 138 для определения дистанций от транспортных средств, находящихся на пути следования транспортного средства 100. Датчик 138 может быть лазерным, акустическим или радарным.
В данном примере, транспортное средство 100 показано пассажирским транспортным средством. Тем не менее, в некоторых примерах, транспортное средство 100 может быть коммерческим транспортным средством, например, грузовым полуприцепом, грузовым автомобилем, железнодорожным или морским транспортным средством.
На фиг. 2 в качестве примера показано транспортное средство 100 и расстояние 210, соответствующее электронному горизонту транспортного средства. Транспортное средство 100 генерирует электронный горизонт (например, вектор данных), состоящий из информации об уклонах дороги 214. Электронный горизонт составлен из некоторого количества участков 220 или сегментов, и участки имеют по одному связанному с ними или соответствующему им значению уклона или крутизны дороги. Длина участка может быть выражена расстоянием или временем. Информация об уклоне дороги обеспечивается для заданного расстояния 210 или заданного периода времени на пути следования транспортного средства. Информация об уклоне дороги может подаваться в контроллер, показанный на фиг. 1. Например, информация об уклоне дороги может быть подана для заданного расстояния на пути следования транспортного средства, например, на 100, 1500 метров. Альтернативно, информация об уклоне дороги может быть подана для заданного времени вперед по пути следования транспортного средства. Например, информация об уклоне дороги может быть подана на 10 секунд вперед для транспортного средства, движущегося со скоростью 110 км/ч, или примерно на 1883 метра вперед от транспортного средства. Данные уклона дороги могут сохраняться в памяти показанной на фиг. 1 системы определения местоположения транспортного средства, или же они могут определяться по хранящимся в памяти значениям высотных отметок дороги. В одном примере, данные уклона дороги могут вызываться из памяти за счет индексирования памяти по местоположению и направлению движения транспортного средства. Значения уклона дороги, полученные за заданное время или для заданного расстояния, могут быть сохранены в памяти в виде массива или вектора, и данные в массиве могут обновляться в порядке очереди по мере движения транспортного средства. Например, если значение уклона дороги получается для каждых 100 метров поверхности дороги, то массив данных уклона дороги, соответствующий 1500 метрам пути, будет содержать 15 участков с соответствующими значениями уклона. Значения уклона между участками могут изменяться ступенчато.
На фиг. 3 показан пример источника двигательной энергии транспортного средства. В данном примере, источником двигательной энергии транспортного средства является двигатель с искровым зажиганием. Тем не менее, источником двигательной энергии транспортного средства может быть дизельный двигатель, турбина или электрическая машина.
На фиг. 3 схематически показан один цилиндр многоцилиндрового двигателя 330 в системе 300 двигателя. Двигатель 330 может управляться, по меньшей мере, частично, системой управления, включающей в себя контроллер 12, и воздействием водителя 382 через устройство 380 ввода. В данном примере, устройство 380 ввода включает в себя педаль акселератора и датчик 384 положения педали акселератора, предназначенный для выработки пропорционального сигнала положения педали ПП.
Камера 332 сгорания двигателя 330 может включать в себя цилиндр, сформированный стенками 334 цилиндра с расположенным между ними поршнем 336. Поршень 336 может быть соединен с коленчатым валом 340 таким образом, чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 340 через промежуточную трансмиссионную систему может быть соединен по меньшей мере с одним ведущим колесом транспортного средства. Кроме того, через маховик с коленчатым валом 340 может быть соединен стартер, обеспечивающий запуск двигателя 330.
Камера 332 сгорания может принимать впускной воздух из впускного коллектора 344 через впускной канал 342 и может выпускать газы горения через выпускной канал 348. Впускной коллектор 344 и выпускной канал 348 могут избирательно сообщаться с камерой 332 сгорания через соответствующий впускной клапан 352 и выпускной клапан 354. В некоторых примерах, камера 332 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
В данном примере, впускной клапан 352 и выпускной клапан 342 могут управляться кулачковым приводом через соответствующие системы 351 и 353 кулачкового привода. Каждая из систем 351 и 353 кулачкового привода могут содержать один или несколько кулачков и могут использовать одну или несколько из следующих систем: систему переключения профилей кулачков (ППК), систему изменения фаз кулачкового распределения (ИФКР), систему изменения фаз газораспределения (ИФГ) и/или систему изменения высоты подъема клапанов (ИВПК), которые контроллер 12 может использовать для варьирования работы клапанов. Положение впускного клапана 352 и выпускного клапана 354 может определяться датчиками положения 355 и 357 соответственно. В альтернативных осуществлениях, впускной клапан 352 и/или выпускной клапан 354 могут управляться электрическим приводом клапанов. Например, цилиндр 332 может альтернативно включать в себя впускной клапан, управляемый электрическим приводом, и выпускной клапан, управляемый кулачковым приводом, включающим в себя систему ППК и/или систему ИФКР.
Топливная форсунка 369 показана непосредственно соединенной с камерой 332 сгорания для впрыска топлива непосредственно в нее пропорционально ширине импульса сигнала, принимаемого от контроллера 12. Тем самым, топливная форсунка 369 обеспечивает то, что называется прямым впрыском топлива в камеру 332 сгорания. Топливная форсунка может быть смонтирована в боковине камеры сгорания или в верхней части камеры сгорания. Топливо может доставляться к топливной форсунке 369 от топливной системы (не показана), включающей в себя топливный бак, топливный насос и топливную рампу. В некоторых осуществлениях, камера 332 сгорания альтернативно или дополнительно может включать в себя топливную форсунку, размещенную во впускном коллекторе 344 в конфигурации, обеспечивающей так называемый распределенный впрыск топлива, чтобы впрыскивать топливо во впускной канал выше по потоку от камеры 332 сгорания.
Искра подается в камеру 332 сгорания посредством свечи 366 зажигания. Система зажигания также может содержать катушку (не показана) зажигания для повышения напряжения, подаваемого на свечу 366 зажигания. В других примерах, таких как дизельный двигатель, свеча 366 зажигания может отсутствовать.
Впускной канал 342 может содержать дроссельную заслонку 362, имеющую дроссельную шайбу 364. В данном частном примере, положение дроссельной шайбы 364 может варьироваться контроллером 12 посредством сигнала, подаваемого на электромотор или исполнительное устройство, входящие в состав дроссельной заслонки 362, причем эта конфигурация обычно называется электронным управлением дроссельной заслонкой (ЭУДЗ). Тем самым, дроссельную заслонку 362 можно задействовать для управления потоком впускного воздуха, подаваемого в камеру 332 сгорания, а также в другие цилиндры двигателя. Информация о положении дроссельной шайбы 364 может обеспечиваться контроллеру 12 посредством сигнала положения дросселя (ПД). Впускной канал 342 может содержать датчик 320 массового расхода воздуха и датчик 322 давления в коллекторе для измерения количества воздуха, поступающего в двигатель 330.
Датчик 327 отработавших газов показан соединенным с выпускным каналом 348 выше по потоку отработавших газов от устройства 370 снижения токсичности выбросов. Датчиком 327 отработавших газов может быть любой датчик, подходящий для обеспечения информации о воздушно-топливном отношении в отработавших газах, например, датчик УДКОГ (универсальный содержания кислорода в отработавших газах), датчик ДКОГ (датчик содержания кислорода в отработавших газах) с двумя состояниями, датчик НДКОГ (нагреваемый датчик содержания кислорода в отработавших газах), датчик NOx, НС или СО. В одном примере, находящийся выше по потоку датчик 327 отработавших газов является датчиком УДКОГ, выполненным с возможностью выдачи выходного сигнала, например, сигнала напряжения, пропорционального количеству кислорода, присутствующего в отработавших газах. Контроллер 12 преобразует выходной сигнал датчика кислорода в воздушно-топливное отношение отработавших газов через передаточную функцию датчика кислорода.
Устройство 370 снижения токсичности выбросов показано размещенным вдоль по выпускному каналу 348 ниже по потоку от датчика 327 отработавших газов. Устройство 370 снижения токсичности выбросов может быть ТКН (трехкомпонентным каталитическим нейтрализатором), улавливателем NOx, другим из разнообразных устройств снижения токсичности выбросов или сочетаниями вышеперечисленных устройств. В некоторых примерах, в процессе работы двигателя 330 устройство 370 снижения токсичности выбросов можно периодически восстанавливать, эксплуатируя по меньшей мере один цилиндр двигателя в пределах конкретного воздушно-топливного отношения.
Контроллер 12 на фиг. 3 показан в виде микрокомпьютера, содержащего: микропроцессорное устройство 302 (МПУ), порты 304 ввода/вывода, электронную среду хранения выполняемых программ и калибровочных значений, в данном конкретном примере показанную в виде постоянного запоминающего устройства 306 (ПЗУ) (например, в качестве долговременной памяти), оперативное запоминающее устройство 308 (ОЗУ), энергонезависимое запоминающее устройство 310 (ЭЗУ) и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от соединенных с двигателем 330 датчиков, среди которых можно назвать: показание массового расхода воздуха (МРВ) от датчика 320 массового расхода воздуха; показание температуры хладагента двигателя (ТХД) от датчика 320 температуры, соединенного с рубашкой 314 охлаждения; сигнал положения двигателя от датчика 318 на эффекте Холла (или датчика иного типа), измеряющего положение коленчатого вала 340; сигнал положения дросселя (ПД) от датчика 365 положения дросселя; сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 322. Сигнал частоты вращения двигателя (ЧВД) может быть сгенерирован контроллером 12 из сигнала датчика 318 положения коленчатого вала. Сигнал ДВК также обеспечивает индикацию разряжения или давления во впускном коллекторе 344. Отметим, что могут использоваться разнообразные сочетания вышеуказанных датчиков, например, датчик МРВ без датчика ДВК, или наоборот. В процессе работы двигателя, значение крутящего момента двигателя можно логически вывести из показаний датчика 322 ДВК и частоты вращения двигателя. Кроме того, показания данного датчика вместе с найденной частотой вращения двигателя могут быть исходными данными для оценивания заряда (включающего в себя воздух), всасываемого в цилиндр. В одном примере, датчик 318 положения коленчатого вала, который также используется в качестве датчика частоты вращения двигателя, может выдавать заданное количество равноотстоящих импульсов на каждый оборот коленчатого вала.
Постоянное запоминающее устройство 306 может быть запрограммировано машиночитаемыми данными, представляющими собой долговременные инструкции, исполняемые микропроцессорным устройством 302 для реализации по меньшей мере частей способов, описанных ниже, а также других вариантов, которые предполагаются, но конкретно не перечисляются.
В процессе работы каждый цилиндр двигателя 330 типично проходит четырехтактный цикл, включающий в себя: такт впуска, так сжатия, такт расширения и такт выпуска. На такте впуска обычно выпускной клапан 354 закрывается, а впускной клапан 352 открывается. По впускному коллектору 344 в камеру 332 сгорания подают воздух, и поршень 336 перемещается в нижнюю часть цилиндра для увеличения внутреннего объема камеры 332 сгорания. Положение, в котором поршень 336 находится вблизи низа цилиндра в конце своего хода (то есть когда объем цилиндра 332 максимален), специалистами в данной области техники характерно называется нижней мертвой точкой (НМТ).
На такте сжатия впускной клапан 352 и выпускной клапан 354 закрыты. Поршень 336 перемещается к головке цилиндра, сжимая при этом воздух внутри цилиндра 332. Положение, в котором поршень 336 находится в конце своего хода вверху ближе всего к головке цилиндра (то есть когда объем цилиндра 332 минимален), специалистами в данной области техники характерно называется верхней мертвой точкой (ВМТ). В процессе, который здесь и далее называется впрыском, в камеру сгорания вводится топливо. В процессе, который здесь и далее называется зажиганием, впрыснутое топливо воспламеняется известными способами и средствами, такими как свеча 366 зажигания, в результате чего происходит сжигание топливовоздушной смеси.
На такте расширения расширяющиеся газы толкают поршень 336 обратно в НМТ. Коленчатый вал 340 преобразует перемещение поршня в момент вращения вала. Наконец, на такте выпуска открывается выпускной клапан 354, открывая сожженной топливовоздушной смеси путь в выпускной коллектор 348, а поршень возвращается в ВМТ. Следует отметить, что описание выше по тексту приведено только в качестве примера, и что моменты открытия или закрытия клапанов могут изменяться, например, для положительного или отрицательного перекрытия клапанов, позднего закрытия впускного клапана или по-другому.
Согласно вышеприведенному описанию, на фиг. 3 показан только один цилиндр многоцилиндрового двигателя, и каждый цилиндр может аналогичным образом иметь свой собственный набор впускных/выпускных клапанов, топливную форсунку, свечу зажигания и т.д.
На фиг. 4 показана блок-схема линии 400 привода транспортного средства. Линия 400 привода может получать мощность от двигателя 330, который в деталях показан на фиг. 3. В одном примере, двигатель 330 может быть бензиновым двигателем. В альтернативных примерах могут использоваться другие конфигурации двигателя, например, дизельный двигатель. Двигатель 330 может запускаться системой запуска двигателя (не показана). Кроме того, двигатель 330 может генерировать или регулировать крутящий момент посредством исполнительного устройства 404 передачи крутящего момента, например, топливной форсунки, дроссельной заслонки, кулачка и т.п.
Выходной крутящий момент двигателя может передаваться на преобразователь 406 крутящего момента для приведения в действие ступенчатой автоматической трансмиссии 408 за счет задействования одной или более муфт, среди которых имеется муфта 410 прямого хода, причем преобразователь крутящего момента может считаться компонентом трансмиссии. Преобразователь 406 крутящего момента включает в себя крыльчатку 420, передающую крутящий момент турбине 422 посредством гидравлической жидкости. Для изменения передаточного отношения между двигателем 320 и колесами 414 транспортного средства могут вводиться в зацепление одна или несколько муфт 424 передач. Выход преобразователя 406 крутящего момента, в свою очередь может управляться блокирующей муфтой 412 преобразователя крутящего момента (ПКМ). То есть, когда блокирующая муфта 412 преобразователя крутящего момента полностью выведена из зацепления, преобразователь 406 крутящего момента передает крутящий момент на автоматическую трансмиссию 408 посредством жидкостной передачи между турбиной 422 преобразователя крутящего момента и крыльчаткой 420 преобразователя крутящего момента, тем самым создавая условия для умножения крутящего момента. И наоборот, когда блокирующая муфта 412 преобразователя крутящего момента находится в полном зацеплении, выходной крутящий момент двигателя напрямую передается через муфту 412 преобразователя крутящего момента на входной вал трансмиссии 408. Альтернативно, блокирующая муфта 412 преобразователя крутящего момента может быть введена в зацепление частично, что позволяет регулировать величину крутящего момента, передаваемого трансмиссии. Контроллер 12 может быть выполнен с возможностью регулировать величину передаваемого преобразователем крутящего момента, регулируя блокирующую муфту преобразователя крутящего момента в зависимости от изменяющихся условий работы двигателя или по задаваемому водителем режиму работы двигателя.
Выходной крутящий момент от автоматической трансмиссии 408 в свою очередь может быть передан колесам 414 для приведения транспортного средства в движение. В частности, автоматическая трансмиссия 408 перед тем, как передавать выходной приводной крутящий момент на колеса может регулировать входящий приводной крутящий момент на входном валу в зависимости от условий движения транспортного средства. Скорость движения транспортного средства может определяться с помощью датчика 430 скорости.
Кроме того, колеса 414 могут быть заблокированы задействованием колесных тормозов 416. В одном примере, колесные тормоза 416 могут быть задействованы в ответ на нажатие водителем ногой на педаль (не показана) тормоза. Аналогичным образом, колеса 414 могут быть разблокированы выведением из действия колесных тормозов в ответ на то, что водитель снимает ногу с педали тормоза.
На фиг. 5 показана блок-схема примера системы круиз-контроля транспортного средства. Система 500 круиз-контроля включает в себя датчики транспортного средства, показанные в блоке 502. К датчикам транспортного средства могут среди прочего относиться датчики для определения крутящего момента источника двигательной энергии, скорости, энергопотребления или расхода топлива, рабочих условий окружающей среды, устройства измерения расстояния, сигналы GPS, дорожные условия и входные воздействия водителя. Входные воздействия водителя могут включать в себя требуемую скорость движения транспортного средства, положение педали тормоза, положение педали акселератора, верхнее пороговое значения скорости движения транспортного средства и нижнее пороговое значение скорости движения транспортного средства. Информация датчика транспортного средства может быть входной информацией для электронного горизонта 510, ограничений 508 контроллера, модели 512 динамики транспортного средства, оптимизатора 530 параметров модели упреждающего круиз-контроля, адаптера 504 параметра, работающему по рекурсивному методу наименьших квадратов (РМНК), модели 514 расхода топлива транспортного средства, модели 516 крутящего момента транспортного средства и модели 518 впередиидущего транспортного средства.
Блок 510 электронного горизонта может содержаться в показанном на фиг. 1 контроллере 12 или может содержаться в показанной на фиг. 1 системе 140 определения местоположения транспортного средства. Электронный горизонт может состоять из массива адресов памяти или вектора данных, и массив может включать в себя некоторое количество значений уклона дороги, описывающих уклон дороги, по которой движется транспортное средство. В одном примере, электронный горизонт извлекает дорожные условия из базы данных (например, хранящиеся в памяти значения уклона, причем значения уклона извлекаются из трехмерной карты земной поверхности). Значения уклона дороги могут включать в себя уклон дороги в текущем местоположении транспортного средства, а также значения уклона дороги спереди транспортного средства на пути следования последнего. Уклон дороги может быть преобразован в угол дороги. Блок 510 электронного горизонта обновляет массив или вектор значений уклона дороги в выбранные моменты времени и отсылает обновленный массив на оптимизатор 530 круиз-контроля. Значения уклона дороги могут быть обеспечены для заранее заданного времени движения в будущем или для заранее заданного расстояния перед транспортным средством.
В блоке 512 система 500 круиз-контроля включает в себя модель динамики транспортного средства. Модель динамики транспортного средства может быть построена на физических параметрах и может быть описана следующим образом:

где m масса транспортного средства, v скорость транспортного средства, FTrac сила тяги, определяемая как:

FAero - сила аэродинамического сопротивления, определяемая как:
FRoll - сила сопротивления качения шины, определяемая как:

FGrade - сила преодоления уклона:
Усилие колесного тормоза выражается как Fbrake, потери в трансмиссии как ξDL; эффективный радиус колеса как RWH; передаточное отношение трансмиссии - γ(G); выбранное передаточное отношение трансмиссии - G; окончательное передаточное число транспортного средства - RFDR; крутящий момент источника двигательной энергии, поглощаемый при торможении Т; плотность окружающего воздуха ρ; площадь лобовой поверхности транспортного средства А; коэффициент аэродинамического сопротивления транспортного средства Cd; ускорение свободного падения g; коэффициенты сопротивления качения шины k1 и k2; угол дороги ϕ; t - время; и масса транспортного средства m.
Модель динамики транспортного средства упрощается до:
где β1-β4 являются адаптационными коэффициентами. Упрощение позволяет выполнить адаптацию членов β1-β4, рекурсивным методом (РМНК) наименьших квадратов или другим подходящим методом. Адаптированные параметры улучшают работу модели динамики транспортного средства, а улучшенная работа модели динамики транспортного средства улучшает работы упреждающего контроллера с нелинейной моделью. Адаптивные параметры являются регулируемыми для компенсации изменений массы транспортного средства, ветра, состояния шин и других условий работы транспортного средства. Модель динамики транспортного средства может быть дополнена добавлением возмущающего члена dv. Значение члена dv может оцениваться чаще бета-членов, и в одном примере его можно оценивать с помощью расширенного фильтра Калмана.
В блоке 514 система 500 круиз-контроля включает в себя модель расхода топлива транспортного средства. Модель расхода топлива транспортного средства оценивает расход топлива транспортного средства, и обеспечивает входную информацию для оптимизации топливной экономичности транспортного средства в блоке 510 оптимизатора. Расход топлива транспортного средства выражается многочленом следующего вида:

где  расход топлива в источник двигательной энергии транспортного средства; а с0-с5 являются адаптационными коэффициентами. Модель расхода топлива позволяет выполнить адаптацию членов с0-с5 рекурсивным методом (РМНК) наименьших квадратов или другим подходящим методом. Адаптированные параметры улучшают работу модели расхода топлива транспортного средства, а улучшенная работа модели расхода топлива транспортного средства улучшает работы упреждающего контроллера с нелинейной моделью.
расход топлива в источник двигательной энергии транспортного средства; а с0-с5 являются адаптационными коэффициентами. Модель расхода топлива позволяет выполнить адаптацию членов с0-с5 рекурсивным методом (РМНК) наименьших квадратов или другим подходящим методом. Адаптированные параметры улучшают работу модели расхода топлива транспортного средства, а улучшенная работа модели расхода топлива транспортного средства улучшает работы упреждающего контроллера с нелинейной моделью.
В блоке 504 система 500 круиз-контроля включает в себя РМНК-эстиматор параметра для регулирования коэффициентов β и с модели динамики транспортного средства и модели расхода топлива транспортного средства. Желательно регулировать коэффициенты β и с при изменении условий работы транспортного средства, чтобы можно было достичь желаемого уровня работы контроллера. НМНК-эстиматор рекурсивно адаптирует параметрический вектор х, удовлетворяя систему уравнений (в матричной форме):
Новая оценка параметра выражается следующим образом:

где Hk является массивом m×n, Kk является усилением n×m эстиматора, а yk-Hkxk-1 является поправочным членом.
Где шум vk имеет нулевое среднее значение и ковариантность Rk. Усиление Kk эстиматора и ковариационная матрица Pk обновляются следующим образом:


РМНК-эстиматор инициализируют следующим образом:

где P0=∞I когда х заранее не известно, и P0=0 когда х известно. Собирают фактические данные транспортного средства, используемые в модели динамики транспортного средства и в модели расхода топлива транспортного средства, и коэффициенты модели регулируют с использованием рекурсивного метода наименьших квадратов.
В блоке 516 система круиз-контроля 500 включает в себя модель крутящего момента для источника двигательной энергии транспортного средства. Модель крутящего момента двигателя описывает задержку выдачи крутящего момента двигателем после того, как был запрошен крутящий момент двигателя. Модель крутящего момента двигателя может быть выражена следующим образом:
где τ - постоянная времени, выраженная в виде функции от частоты Ne вращения двигателя и запрошенного крутящего момента Td; а Т - крутящий момент на выходе двигателя или источника двигательной энергии транспортного средства. Запрошенный крутящий момент является функцией флага нейтрального положения трансмиссии или целочисленной переменной в памяти. В частности, запрошенный крутящий момент двигателя выражается как:

где Tin - входной крутящий момент; Nfl - флаг нейтрального положения трансмиссии (например, 1 для нейтрального положения, и 1 - для передачи); а Tidle - крутящий момент двигателя на холостом ходу. Частота вращения двигателя также является функцией флага нейтрального положения трансмиссии.

где Nidle - частота вращения двигателя на холостом ходу, v1 - скорость транспортного средства, а все остальные переменные описаны выше.
В блоке 518 система 500 круиз-контроля включает в себя модель впередиидущего транспортного средства, или модель транспортного средства, за которым следует транспортное средство, работающее в режиме круиз-контроля. Модель впередиидущего транспортного средства применяется к системам, обладающими сведениями о транспортных средствах на пути движения транспортного средства, работающего в режиме круиз-контроля. Модель впередиидущего транспортного средства располагает небольшим объемом информации о впередиидущем транспортном средстве, но используется для предвычисления того, когда будет разрешено ускорение транспортного средства и того, когда потребуется замедление транспортного средства. Впередиидущее транспортное средство можно смоделировать следующим образом:
где v1 - фактическая скорость впередиидущего транспортного средства, а1 - ускорение впередиидущего транспортного средства, а τ1 - постоянная времени, представляющая собой постоянную времени ожидаемого ускорения. Расстояние, может быть выражено следующим образом:
где D1 - дистанция между впередиидущим транспортным средством и транспортным средством, работающим в режиме круиз-контроля, a v - скорость транспортного средства, работающего в режиме круиз-контроля. Скорость впередиидущего транспортного средства может быть оценена по показаниям радарного или лазерного устройства измерения расстояний следующего за ним транспортного средства.
В блоке 506 система 500 круиз-контроля транспортного средства включает в себя целевую функцию. Целевая функция описывает цели или задачи управления для оптимизатора 530. Например, целевая функция может стремиться минимизировать расход топлива, выдерживать скорость транспортного средства в пределах предустановленного скоростного диапазона, ограниченного наибольшей и наименьшей скоростями транспортного средства, выдерживать минимальную дистанцию между транспортными средствами и ограничивать выходной крутящий момент источника двигательной энергии транспортного средства величинами, меньшими порогового крутящего момента. Конкретные детали примера одной целевой функции раскрываются со ссылкой на этап 708 показанного на фиг. 7 алгоритма.
В блоке 508 по входным воздействиям водителя и/или по хранящимся в памяти переменным или функциям определяются эксплуатационные ограничения системы 500 круиз-контроля. В одном примере, водитель может ввести требуемую скорость транспортного средства, и по этой требуемой скорости транспортного средства могут быть определены верхнее и нижнее значения скорости транспортного средства. Например, водитель может ввести в качестве требуемой скорости транспортного средства значение 100 км/ч, и путем сложения с этим значением и вычитания из него значения отклонения, могут быть определены верхнее пороговое значение 110 км/ч и нижнее пороговое значение 90 км/ч. В других примерах, система транспортного средства может отрегулировать верхнее пороговое значение скорости транспортного средства по установленному ограничению скорости для дороги. Например, если водитель выбирает в качестве требуемой скорость 90 км/ч, а ограничение скорости составляет 100 км/ч, то верхнее пороговое значение скорости транспортного средства может быть отрегулировано на 100 км/ч. Могут быть предопределены и сохранены в памяти максимальный крутящий момент источника двигательной энергии и минимальная дистанция от впередиидущего транспортного средства. Альтернативно, водитель может вводить ограничивающие значения. Затем, требуемая скорость транспортного средства и скоростные ограничения могут временно регулироваться при воздействии водителя на педаль акселератора.
В блок 530 система 500 круиз-контроля подает информацию с выходов блоков 506-518 для определения команды оптимального крутящего момента или требования к выходу источника двигательной энергии транспортного средства. Кроме того, оптимизатор 530 может избирательно отключить передачу переднего хода, переведя трансмиссию в нейтральное положение (например, чтобы не одна передача трансмиссии не была включена, чем нарушается связь источника двигательной энергии с колесами транспортного средства), чтобы транспортное средство двигалось накатом и повышалась топливная экономичность. После того, как трансмиссия была переключена в нейтральное положение, оптимизатор 530 может избирательно включить передачу переднего хода, чтобы поддержать или увеличить скорость транспортного средства. Оптимизатор решает оптимизационную задачу с использованием последовательного квадратичного программирования, подробности которого рассмотрены со ссылкой на фиг. 7. Дополнительные подробности работы оптимизатора рассмотрены в описании фиг. 6А - фиг. 8.
В блоке 520 трансмиссия транспортного средства может быть переключена в нейтральное положение, чтобы транспортное средство начало движение накатом, или альтернативно может быть включена передняя передача трансмиссии с целью ускорения транспортного средства. Трансмиссия транспортного средства может быть переключена в нейтральное положение стравливанием гидравлического давления, воздействующего на муфту передач, причем для этого используется соленоид управления переключением передач. Трансмиссия транспортного средства может быть переключена на переднюю передачу (например, 5-ю передачу) путем приложения давления гидравлической жидкости к муфте передач трансмиссии посредством соленоида управления переключением передач.
В блоке 522 может быть отрегулирован выходной крутящий момент источника двигательной энергии транспортного средства. Если источником двигательной энергии является двигатель, то крутящий момент двигателя может быть увеличен путем регулирования одного или более из следующего: положение дроссельной заслонки, момента зажигания, временных установок впрыска топлива, фаз кулачкового распределения или фаз газораспределения. Если источником двигательной энергии является электрическая машина, то крутящий момент машины может быть отрегулирован изменением тока, подаваемого на электрическую машину.
Таким образом, показанная на фиг. 5 система круиз-контроля обеспечивает команду крутящего момента для источника двигательной энергии транспортного средства и команду переключения в нейтральное положение или на передачу для трансмиссии с целью оптимизации топливной экономичности транспортного средства, когда оно работает в режиме круиз-контроля. Контроллер решает задачу круиз-контроля путем применения последовательного квадратичного программирования.
Показанная на фиг. 1 - фиг. 5 система обеспечивает систему транспортного средства, содержащую: источник двигательной энергии; и контроллер в транспортном средстве, причем контроллер содержит хранящиеся в долговременной памяти исполняемые инструкции, включающие в себя алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью. Система транспортного средства включает в себя то, что алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью включает в себя модель динамики транспортного средства и инструкции для адаптации модели динамики транспортного средства. Система транспортного средства предусматривает адаптацию модели динамики транспортного средства по рекурсивному методу наименьших квадратов. Система транспортного средства включает в себя то, что алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью включает в себя модель расхода топлива транспортного средства и инструкции для адаптации модели расхода топлива транспортного средства. Система транспортного средства включает в себя то, что модель расхода топлива транспортного средства адаптируется рекурсивным методом наименьших квадратов. Система транспортного средства включает в себя то, что алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью адаптирует модель динамики транспортного средства и модель расхода топлива транспортного средства в режиме реального времени, когда транспортное средство эксплуатируется в пути в режиме круиз-контроля. Система транспортного средства включает в себя то, что алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью выдает запрос крутящего момента источнику двигательной энергии транспортного средства.
Показанная на фиг. 1 - фиг. 5 система также обеспечивает систему транспортного средства, содержащую: источник двигательной энергии; и контроллер в транспортном средстве, причем контроллер содержит хранящиеся в долговременной памяти исполняемые инструкции, включающие в себя алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью с возможностью активации нейтрального состояния трансмиссии. Система транспортного средства также содержит трансмиссию, связанную с источником двигательной энергии, причем инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для оценивания параметров эксплуатации транспортного средства с нейтральным положением трансмиссии. Система транспортного средства включает в себя то, что инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для оценивания параметров эксплуатации транспортного средства в дорожных условиях, ожидаемых в будущем для данного транспортного средства.
В некоторых примерах, система транспортного средства включает в себя то, что инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для оценивания параметров эксплуатации транспортного средства в дорожных условиях, ожидаемых в будущем для данного транспортного средства, в соответствии с горизонтом прогноза, построенный на картированных дорожных условиях. Система транспортного средства включает в себя то, что инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для выдачи команды источнику двигательной энергии. Система транспортного средства также включает в себя то, что инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для регулирования команды, подаваемой источнику двигательной энергии на основе данных, полученных от впередиидущего транспортного средства, эксплуатируемого на той же дороге, что и транспортное средство. Система транспортного средства включает в себя то, что инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для определения оптимального профиля скорости движения транспортного средства и соответствующего профиля крутящего момента на основе спрогнозированного уклона дороги спереди от текущего местоположения транспортного средства.
На фиг. 6А и фиг. 6В показан пример способа упреждающего круиз-контроля с адаптивной нелинейной моделью с оптимизацией расхода топлива. Способ 600 по меньшей мере частично может быть включен в показанную на фиг. 1 - фиг. 5 систему в качестве исполняемых инструкций, хранящихся в долговременной памяти. Инструкции могут обеспечивать алгоритм управления. Кроме того, способ 600 может включать в себя способы в соответствии с фиг. 7 и фиг. 8. Дополнительно, показанный на фиг. 6А и фиг. 6В способ может обеспечивать рабочую последовательность, показанную на фи. 10. Показанные на фиг. 6А - фиг. 8 способы могут выполняться в режиме реального времени в транспортном средстве, движущемся по дороге.
На этапе 602 способ инициализирует параметры управления. Параметры управления, подлежащие инициализации в моделях и оптимизационных алгоритмах среди прочего могут включать в себя текущую скорость транспортного средства, текущий выходной крутящий момент источника двигательной энергии, текущую частоту вращения источника двигательной мощности, текущий расход топлива источника двигательной энергии, текущий угол наклона дороги, по которой движется транспортное средство и выбранную передачу трансмиссии. После инициализации параметров управления способ 600 переходит на этап 604.
На этапе 604 способ 600 выясняет, требуется ли режим круиз-контроля. Может быть определено, что режим круиз-контроля требуется, если водитель воздействует на кнопку, переключатель или подаст команду голосом, указывающую на желание перейти в режим круиз-контроля. В режиме круиз-контроля выходной крутящий момент источника двигательной энергии регулируется посредством контроллера 12 с тем, чтобы скорость транспортного средства поддерживалась в пределах требуемого скоростного диапазона, ограниченного верхним пороговым значением скорости (например, 100 км/ч) и нижним пороговым значением скорости (например, 90 км/ч). При этом для поддержания требуемой скорости транспортного средства регулируют выходной крутящий момент транспортного средства. Может быть определено, что режим круиз-контроля не требуется, если водитель нажмет на тормоз, задействует кнопку, переключатель, или подаст команду голосом. Если способ 600 выяснит, что режим круиз-контроля требуется, то ответ будет положительным и способ 600 перейдет на этап 606. В противном случае ответ будет отрицательным и выполнение способа 600 завершится.
На этапе 606 способ 600 получает новые данные от датчиков и из памяти системы. Среди прочего, данные, получаемые от датчиков, могут включать в себя скорость транспортного средства, уклон или крутизну дороги, выходной крутящий момент источника двигательной энергии, расход топлива или энергопотребление источника двигательной энергии, частоту вращения источника двигательной энергии и выбранную передачу трансмиссии. Среди прочего, данные получаемые из памяти, могут включать в себя ограничения круиз-контроля, требуемую скорость транспортного средства, минимальную дистанцию до впередиидущего транспортного средства и параметры настройки контроллера. После того, как новые данные будут получены, способ 600 переходит на этап 608.
На этапе 608 способ 600 корректирует или обновляет коэффициенты β и с для модели динамики транспортного средства и модели расхода топлива транспортного средства, описанных для блоков 512 и 514 на фиг. 5. Коэффициенты β и с регулируют по полученным на этапе 606 новым данным, используя рекурсивный метод наименьших квадратов, рекурсивный метод наименьших квадратов с экспоненциальным забыванием или другой подходящий метод. Скорректированные модели являются основой для наблюдателей состояния системы, которые тоже обновляются или корректируются по скорректированным моделям. После коррекции коэффициентов модели способ 600 переходит на этап 610.
На этапе 610 способ 600 применяет упреждающее управление с нелинейной моделью для нахождения решения оптимальной траектории крутящего момента без задействования нейтрального положения трансмиссии. Упреждающее управление с нелинейной моделью применяют для входных данных уклона в электронном горизонте, начиная от текущего положения транспортного средства до дальнего положения электронного горизонта спереди транспортного средства. Упреждающее управление с нелинейной моделью выдает значения оптимального крутящего момента, исходя из ограничений в целевой функции, описанной для блока 708 на фиг. 7 для входных данных электронного горизонта. После применения упреждающего управления с нелинейной моделью способ 600 переходит на этап 612
На этапе 612 способ 600 определяет ожидаемое значение Е0 экономии топлива для горизонта прогнозирования (например, данных об уклоне дороги в электронном горизонте) для условий, когда транспортное средство не работает с трансмиссией в нейтральном положении. В одном примере, способ 600 оценивает экономию топлива для участков (например, интервала между значениями уклона в электронном горизонте) в электронном горизонте путем индексирования модели расхода топлива или энергопотребления источника двигательной энергии, используя определенное на этапе 610 оптимальное значение крутящего момента для участка и частоту вращения источника двигательной энергии. Модель энергопотребления транспортного средства сохраняет найденные эмпирические значения расхода топлива или энергопотребления и выдает эти значения на выход. Значение расхода топлива или энергопотребления для участка сохраняется в памяти и способ 600 переходит на этап 614.
На этапе 614 способ определяет максимальная длительность задействования нейтрального положения. Данная длительность определяется временем, требующимся для достижения нижнего порогового значения скорости движения транспортного средства. Максимальную длительность определяют, вводя текущие условия работы транспортного средства в описанную для блока 512 на фиг. 5 модель транспортного средства, устанавливая на ноль значение крутящего момента двигателя, поглощаемого при торможении и находя решение для времени, которое потребуется для движения транспортного средства по инерции или накатом для замедления до нижнего порогового значения скорости движения. После того, как будет определена максимальная длительность задействования нейтрального положения, способ 600 переходит на этап 616.
На этапе 616 способ 600 применяет упреждающее управление с нелинейной моделью для нахождения решения оптимальной траектории крутящего момента с задействованием нейтрального положения трансмиссии. В одном примере для снижения вычислительной нагрузки упреждающее управление с нелинейной моделью применяется только к первой записи уклона в электронном горизонте спереди от текущего местоположения транспортного средства. Тем не менее, в других примерах за счет увеличения вычислительной нагрузки контроллера упреждающее управление с нелинейной моделью может быть расширено на длину электронного горизонта. Упреждающее управление с нелинейной моделью выдает переменную управления состоянием трансмиссии, которая требует от трансмиссии переключиться в нейтральное положение или переднюю передачу в зависимости от ограничений целевой функции, описанной для блока 506 на фиг. 5 для записей в электронном горизонте. Кроме того, когда требуемым состоянием является нейтральное положение, упреждающее управление с нелинейной моделью выдает крутящий момент холостого хода двигателя. Для участков в электронном горизонте, которым предписывается задействование нейтрального положения, упреждающий контроллер с нелинейной моделью изменяет условия моделирования для имитации ситуации, в которой трансмиссия находится в нейтральном положении, а источник двигательной энергии находится в условиях холостого хода или пониженной выходной мощности. Упреждающее управление с нелинейной моделью с нейтральным положением трансмиссии подробнее раскрывается со ссылкой на фиг. 8. После применения упреждающего управления с нелинейной моделью с нейтральным положением трансмиссии способ 600 переходит на этап 618.
На этапе 618 способ 600 определяет ожидаемое значение Е1 экономии топлива для горизонта прогнозирования (например, данных об уклоне дороги в электронном горизонте) для условий, когда транспортное средство работает с трансмиссией в нейтральном положении. В одном примере, способ 600 оценивает экономию топлива для участков (например, интервала между значениями уклона в электронном горизонте) в электронном горизонте путем индексирования модели расхода топлива или энергопотребления источника двигательной энергии, используя определенное на этапе 610 оптимальное значение крутящего момента для участков и частоту вращения источника двигательной энергии. Модель энергопотребления транспортного средства сохраняет найденные эмпирические значения расхода топлива или энергопотребления и выдает эти значения на выход. Значение расхода топлива или энергопотребления для участков сохраняется в памяти и способ 600 переходит на этап 614.
На этапе 620 способ выясняет, требуется ли эксплуатация транспортного средства с трансмиссией в нейтральном положении. В одном примере, ответ будет положительным и способ 600 перейдет на этап 622 в ответ на то, что ожидаемое значение Е1 экономии топлива превысит ожидаемое значение Е0 экономии топлива. Другими словами, если эксплуатация транспортного средства с трансмиссией в нейтральном положении обеспечивает большую экономию топлива, когда скорость движения транспортного средства находится между верхним и нижним пороговыми значениями, ответ будет положительным и способ 600 перейдет на этап 622. Если ожидаемое значение Е1 экономии топлива будет больше ожидаемого значения Е0 экономии топлива, или если ожидается, что при нахождении трансмиссии в нейтральном положении скорость движения транспортного средства будет меньше нижнего порогового значения, то ответ будет отрицательным и способ 600 перейдет на этап 630.
На этапе 622 способ 600 выбирает траекторию управления при нахождении трансмиссии транспортного средства в нейтральном положении. Траектория получается с выхода этапа 616 и включает в себя вектор или массив, требующий, чтобы трансмиссия транспортного средства работала в нейтральном положении по меньшей мере на одном участке электронного горизонта. Траектория также включает в себя вектор или массив крутящего момента для эксплуатации источника двигательной энергии транспортного средства на холостом ходу или в другом состоянии низкого энергопотребления (например, с остановкой работы двигателя или вращения электромотора). После того, как будет выбрана требуемая траектория управления, способ 600 переходит на этап 632.
На этапе 630 способ 600 выбирает траекторию управления при нахождении трансмиссии транспортного средства на передней передаче. Траектория получается с выхода этапа 610 и включает в себя запрос крутящего момента для поддержания скорости движения транспортного средства в диапазоне между верхним и нижним пороговыми значениями. Запрос крутящего момента также обеспечивает минимизацию расхода топлива транспортного средства. После того, как будет выбрана требуемая траектория управления, способ 600 переходит на этап 632.
На этапе 632 способ 600 применяет управляющие действия к исполнительным устройствам, а затем ожидает следующего периода получения данных. Управляющие действия предпринимаются для эксплуатации транспортного средства на участке электронного горизонта, соответствующем текущему местоположению транспортного средства. Управляющие действия определяются траекторией, выбранной на этапе 622 или 630. Если управляющее действие предусматривает изменение состояния трансмиссии с переходом из нейтрального положения на первую передачу или наоборот, то может быть изменено состояние одной или нескольких муфт трансмиссии для переключения трансмиссии в нейтральное положение или переднюю передачу. Выходной крутящий момент источника двигательной энергии транспортного средства может быть отрегулирован в ответ на изменение запрошенного крутящего момента за счет изменения состояния исполнительного устройства передачи крутящего момента, причем этим состоянием может быть положение дроссельной заслонки, установки фаз кулачкового распределения, опережение зажигания, временные установки впрыска топлива или величина тока, подаваемого на электрическую машину. После применения управляющих действий к транспортному средству способ 600 возвращается на этап 604.
На фиг. 7 подробно показан пример численного метода упреждающего круиз-контроля с нелинейной моделью. Для решения задачи нелинейной оптимизации используется последовательное квадратичное программирование (ПКП). J-тая итерация ПКП-решателя может быть записана как:


Новая итерация выражается следующим образом:

где αj - приемлемая длина шага. Выбор αj важен для обеспечения быстрой сходимости алгоритма. В целом, приемлемое значение можно найти, применив алгоритм линейного поиска. Для системы с относительно благоприятными нелинейностями, длина шага может быть выбрана постоянной, но ее всегда нужно выбирать так, чтобы целевая функция уменьшалась во всех предвидимых сценариях.
На этапе 704 способ 700 получает новые данные с этапа 606, показанного на фиг. 6А. Альтернативно, способ 700 может извлечь данные из памяти и получить их от датчиков, как описано для этапа 606, показанного на фиг. 6А. После получения новых данных способ 700 переходит на этап 706.
На этапе 706 способ 700 выполняет модельные расчеты и линеаризацию. Расчеты модели и линеаризация выполняют на моделях, описанных в блоках 512-518. Предполагается, что нелинейная система описывается следующим образом:

где х 0 состояние системы, u - входная информация системы, у - выходная информация системы, a f и g обозначают функции. Расчет модели системы по горизонту прогнозирования или электронному горизонту может быть выполнен численным решением вышеприведенного обыкновенного дифференциального уравнения пригодным для этой цели решателем, например, базовым прямым методом Эйлера. Один шаг метода Эйлера в момент времени tk=t0+kTs может быть записан следующим образом:

Линеаризация вышеприведенного обыкновенного дифференциального уравнения в момент времени tk=t0+kTs в точке  может быть записан следующим образом:
может быть записан следующим образом:


где:



Линеаризованную систему дискретизируют для получения финитной параметризации во входной информации системы и прогнозирования на один шаг.


Примерная дискретизация может быть записана следующим образом:


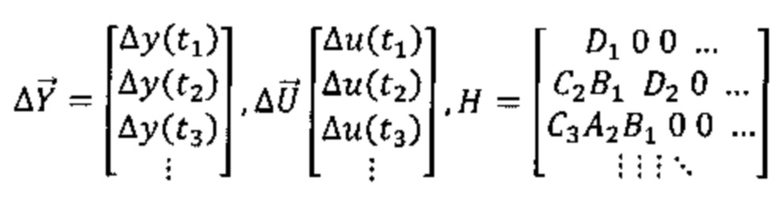
Линеаризацию оценивают для каждого периода получения данных для каждого участка в электронном горизонте или горизонте прогнозирования, что позволяет сформировать матрицы Н чувствительности для прогнозируемой траектории входной информации системы. Линеаризованный прогноз для выходной информации системы может быть записан следующим образом:
где:
После того, как будет выполнены модельные расчеты и линеаризация, способ 700 переходит на этап 708.
На этапе 708 способ 700 осуществляет постановку задачи квадратичного программирования (КП). Задача КП ставится по целевой функции и ограничениям. В одном примере, целевая функция может быть выражена следующим образом:

где: J - переменная целевой функции, N - горизонт прогнозирования, основанный на векторе или массиве электронного горизонта, qN - составляющая слежения за требуемой скоростью движения транспортного средства в конце горизонта прогнозирования, qmavg - составляющая среднего расхода топлива на прогнозируемом горизонте, - составляющая слежения за средней скоростью движения транспортного средства, а rT - активность команды крутящего момента.
Первый член целевой функции представляет собой терминальную составляющую (скорость движения транспортного средства в конце горизонта N прогнозирования). Второй член представляет собой средний расход топлива на горизонте прогнозирования. Третий член представляет собой среднюю скорость движения транспортного средства на горизонте прогнозирования. И наконец, четвертый член представляет собой составляющую δT(tk)=T(tk)-T(tk-1) активности крутящего момента, или изменение крутящего момента двигателя или источника двигательной энергии между к шагами. Ограничения целевой функции могут быть выражены следующим образом:



где Nvlim - количество точек предельной скорости транспортного средства, NDlim - предельная дистанция до впередиидущего транспортного средства в горизонте прогнозирования, и где ε1(tk) и ε2(tk) являются вспомогательными смягчающими переменными. Вспомогательные смягчающие переменные ε1(tk) и ε2(tk) гарантируют осуществимость результирующей задачи оптимизации за счет того, что предельные скорости транспортного средства и предельная дистанция до впередиидущего транспортного средства обрабатываются в качестве мягких ограничений путем введения вспомогательных смягчающих переменных ε1(tk) и ε2(tk). Отметим, что минимальная дистанция до впередиидущего транспортного средства состоит из двух частей. Первая часть Dmin является заданной минимальной дистанцией, а вторая часть параметризована временем tpminv(tk), которое представляет собой заданное минимальное время, требующееся для того, чтобы расстояние до впередиидущего транспортного средства стало равным Dmin.
Переменная J оптимизации является траекторией крутящего момента (вместе со смягчающими переменными) на горизонте прогнозирования. С целью уменьшения вычислений и занимаемой памяти в реальном масштабе времени, используют технику объединения, которая уменьшает количество переменных оптимизации. В результате, управляющее действие по регулированию крутящего момента источника двигательной энергии не рассчитывается для каждого периода получения данных по горизонту прогнозирования. Вместо этого, несколько периодов получения данных объединяют (группируют) и управляющее действие в пределах каждой группы считают фиксированным (то есть, не изменяющимся). Это может быть выражено в виде линейного преобразования переменной (крутящего момента) оптимизации:
где Bbl - матрица преобразования (объединения) а траектории крутящего момента выражаются следующим образом:


где nbl - суммарное количество групп, в b - вектор, имеющий длину, задающую количество получений данных в каждой индивидуальной группе. Вектор  становится новой переменной оптимизации, заменяя собой исходно бывшую таким параметром траекторию
становится новой переменной оптимизации, заменяя собой исходно бывшую таким параметром траекторию  . После постановки задачи КП способ 700 переходит на этап 710.
. После постановки задачи КП способ 700 переходит на этап 710.
На этапе 710 способ решает задачу КП. Финальная аппроксимация КП на j-той итерации ПКП может быть описана следующим образом:

где - траектория, j - итерация,  - вектор смягчающих переменных для предельной скорости движения транспортного средства, где vmin≤εv(tk)≤vmax,
- вектор смягчающих переменных для предельной скорости движения транспортного средства, где vmin≤εv(tk)≤vmax,
 - вектор смягчающих переменных для предельной дистанции до впередиидущего транспортного средства, где Dmin≤εD(tk), Jj - целевая функция для j-той итерации, как было описано выше, ,
- вектор смягчающих переменных для предельной дистанции до впередиидущего транспортного средства, где Dmin≤εD(tk), Jj - целевая функция для j-той итерации, как было описано выше, , - целевая функция, связанная со смягченной предельной скоростью транспортного средства согласно
- целевая функция, связанная со смягченной предельной скоростью транспортного средства согласно  , а
, а  - целевая функция, связанная со смягченной предельной дистанцией до впередиидущего транспортного средства согласно
- целевая функция, связанная со смягченной предельной дистанцией до впередиидущего транспортного средства согласно  . После того, как будет решена задача КП, способ 700 переходит на этап 712.
. После того, как будет решена задача КП, способ 700 переходит на этап 712.
На этапе 712 способ 700 обновляет или корректирует решение. В соответствии с вышеописанным ПКП-решателем, траектория может быть скорректирована или обновлена следующим образом:
Скорректированная траектория крутящего момента является начальной точкой для следующей (j+1)-той итерации ПКП. После коррекции решения способ 700 переходит на этап 714.
На этапе 714 способ 700 выясняет, сошлось ли решение к оптимальному решению. В некоторых примерах, решение может быть сравнено с целевой функцией. Тем не менее, для уменьшения проблем горизонта, может требоваться, чтобы решение сошлось за заданное количество итераций (например, за 1 или 2). Если способ 700 выяснит, что решение сошлось к оптимальному, ответ будет положительным и способ завершится или возвратится на этап 610, показанный на фиг. 6А.
Таким образом, показанный на фиг. 7 способ при движении транспортного средства на передней передаче регулирует подаваемую на источник двигательной энергии команду крутящего момента в зависимости от дистанции между работающим в режиме круиз-контроля транспортным средством и впередиидущим относительно этого транспортного средства другим транспортным средством. Показанный на фиг. 7 способ также определяет оптимальный профиль скорости движения транспортного средства в зависимости от ограничений.
На фиг. 8 показан пример способа упреждающего круиз-контроля с нелинейной моделью с оптимизацией расхода топлива и выбором нейтрального положения трансмиссии. Выбор нейтрального положения трансмиссии относится к контроллеру, обладающего способностью изменять рабочее состояние трансмиссии транспортного средства с передней передачи в нейтральное положение и наоборот для улучшения топливной экономичности транспортного средства в режиме круиз-контроля. Подавая команду трансмиссии на переключение в нейтральное положение, можно увеличить или сохранить скорость движения транспортного средства на плоских дорогах или при движении под уклон, так как торможение двигателя и некоторые потери в трансмиссии при переключении ее в нейтральное положение не будут оказывать сопротивление некоторой доли силы тяжести, воздействующей на транспортное средство.
Рабочее состояние трансмиссии является двоичной переменной, имеющей значение О для трансмиссии, не находящейся в нейтральном положении, и имеющем значение 1 для трансмиссии, находящейся в нейтральном положении. Если электронный горизонт или горизонт прогнозирования состоит из Nd точек, то количество возможных комбинаций рабочего состояния трансмиссии для ее работы на передаче или в нейтральном положении, составит 2Nd. Поэтому, для того, чтобы достичь минимальной целевой функции, показанный на фиг. 8 алгоритм может быть выполнен 2Nd раз. Тем не менее, с целью снижения вычислительной нагрузки контроллера может быть желательным выполнить только одну итерацию для первого участка в электронном горизонте или горизонте прогнозирования.
На этапе 804 способ 800 получает новые данные с этапа 606 показанного на фиг. 6А. Альтернативно, способ 800 может извлечь данные из памяти и получить их от датчиков, как описано для этапа 606, показанного на фиг. 6А. После получения новых данных способ 800 переходит на этап 806.
На этапе 806 способ 800 выбирает одну или несколько предварительно заданных траекторий нейтрального положения трансмиссии на электронном горизонте или горизонте прогнозирования с приемлемыми комбинациями задействования нейтрального положения, причем указанные траектории имеют фиксированную длительность и начальное положение в электронном горизонте или горизонте прогнозирования. Все предварительно заданные траектории нейтрального положения трансмиссии оценивают вместе с соответствующими рассчитанными траекториями крутящего момента с точки зрения экономии топлива и нарушений ограничений. На этапе 806 выбирают траекторию, которая не была оценена.
На этапе 808, выполняется описанная для этапов 706-714 показанного на фиг. 7 алгоритма процедура ПКП с целью определения траектории крутящего момента, соответствующей предварительно заданной траектории нейтрального положения трансмиссии, которая была выбрана на этапе 806. Кроме того, согласно описанию для этапа 612, показанного на фиг. 6А, рассчитывается и сохраняется в памяти соответствующая оценка Ei экономии топлива на горизонте прогнозирования. Следует отметить, что для оценивания задействования нейтрального положения трансмиссии, крутящий момент источника двигательной энергии устанавливают на низкое значение, например, на ноль или значение крутящего момента двигателя на холостом ходу, при оценивании условий задействования нейтрального положения, чтобы расход топлива или энергопотребление источника двигательной энергии были точными. После выполнения процедуры ПКП способ 800 переходит на этап 810.
На этапе 810 способ 800 выясняет, все ли комбинации задействования нейтрального положения трансмиссии были оценены. Если все, то ответ будет положительным, и способ 800 перейдет на этап 812. В противном случае, ответ будет отрицательным, и способ возвратится на этап 806 чтобы оценить следующую траекторию нейтрального положения трансмиссии.
На этапе 812 способ 800 выбирает из комбинаций траекторий нейтрального положения трансмиссии траекторию нейтрального положения трансмиссии и соответствующую траекторию крутящего момента, чтобы обеспечить наилучшую экономию топлива. Способ 800 завершается или возвращается на этап 620, показанный на фиг. 6В.
Таким образом, при нахождении транспортного средства в режиме круиз-контроля, показанный на фиг. 8 способ оценивает работу транспортного средства с нейтральным положением трансмиссии без того, чтобы трансмиссии было бы нужно фактически находиться в нейтральном положении. Оценка определяется по меньшей мере частично дорожными условиями, с которыми, как ожидается, транспортное средства встретиться в будущем времени, причем дорожные условия в будущем времени определяются картой дорожных условий, хранящейся в памяти.
Показанный на фиг. 6А - фиг. 8 способ обеспечивает способ круиз-контроля для транспортного средства, включающий в себя следующее: получение контроллером информации о транспортном средстве от одного или более датчиков; обеспечение команды крутящего момента по результату выполненного контроллером алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью; и регулирование исполнительного устройства передачи крутящего момента источника двигательной энергии в ответ на команду крутящего момента. Способ включает в себя то, что при работе транспортного средства в режиме круиз-контроля, алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью обеспечивает избирательное переключение трансмиссии транспортного средства в нейтральное положение. Способ включает в себя то, что команда крутящего момента находится в пределах первого диапазона пороговых значений, ограниченного первым нижним пороговым значением крутящего момента и первым верхним пороговым значением крутящего момента, если алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью получает данные из выпуклой модели расхода топлива транспортного средства, когда транспортное средство работает при первом наборе условий. Способ включает в себя то, что команда крутящего момента находится в пределах второго диапазона пороговых значений, ограниченного вторым нижним пороговым значением крутящего момента и вторым верхним пороговым значением крутящего момента, если алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью получает данные из невыпуклой модели расхода топлива транспортного средства, когда транспортное средство работает при первом наборе условий, причем второй диапазон пороговых значений имеет большую разность между первым нижним пороговым значением крутящего момента и первым верхним пороговым значением крутящего момента, при том, что второе нижнее пороговое значение крутящего момента меньше первого нижнего порогового значения крутящего момента. Способ включает в себя то, что источником двигательной энергии является двигатель, причем команда крутящего момента определяется горизонтом прогнозирования, при том, что горизонт прогнозирования содержит данные об уклоне дороги. Способ включает в себя то, что команда крутящего момента также определяется состоянием транспортного средства, идущего впереди транспортного средства, содержащего контроллер.
На фиг. 9А показана схема примера выпуклой модели расхода топлива транспортного средства. В некоторых примерах, модель расхода топлива транспортного средства также может называться картой. Вертикальная ось представляет собой расход топлива, подаваемого в двигатель. Горизонтальная ось представляет собой крутящий момент двигателя. Ось, направленная внутрь листа бумаги, представляет собой частоту вращения двигателя. Модель расхода топлива транспортного средства сохраняет полученные эмпирически значения расхода топлива или использует расход, соответствующий выбранным значениям частоты вращения и крутящего момента двигателя. Соединенные друг с другом значения расхода топлива образуют показанную выпуклую поверхность, если смотреть в перспективе горизонтальной оси. Геометрическая форма модели расхода топлива транспортного средства может изменяться при изменении типа топлива (например, бензин, спирт с бензином, спирт), условий окружающей среды, в которых работает двигатель, и других условий. Геометрическая форма модели расхода топлива транспортного средства (например, выпуклая, невыпуклая, аффинная) может влиять на выходную информацию контроллера, так как оптимальное решение крутящего момента также оптимизируется для минимального расхода топлива. Геометрическая форма модели расхода топлива транспортного средства и ожидаемая выходная информация контроллера могут быть определены из значений коэффициентов многочлена, описывающего модель расхода топлива транспортного средства. Например, если коэффициенты указывают на то, что модель расхода топлива транспортного средства выпуклая, то описанный со ссылкой на фиг. 6А - 8 контроллер выдает узкополосный запрос крутящего момента, изменяющийся в пределах от верхнего порогового значения крутящего момента до нижнего порогового значения крутящего момента, причем нижнее пороговое значение крутящего момента больше нулевого крутящего момента. Выдаваемое описанным со ссылкой на фиг. 6А - фиг. 8 контроллером решение крутящего момента для выпуклой модели расхода топлива транспортного средства может считаться постоянным решением крутящего момента, хотя запрошенный момент на самом деле варьируется для поддержания скорости движения транспортного средства. Узкополосный запрос крутящего момента, выдаваемый контроллером для выпуклой модели расхода топлива транспортного средства, включает в себя нижнее пороговое значение крутящего момента, которое больше нижнего порогового значения крутящего момента для невыпуклой модели расхода топлива транспортного средства. Кроме того, узкополосный запрос крутящего момента, выдаваемый контроллером для выпуклой модели расхода топлива транспортного средства, включает в себя верхнее пороговое значение крутящего момента, которое меньше верхнего порогового значения крутящего момента для невыпуклой модели расхода топлива транспортного средства.
На фиг. 9В показана схема примера невыпуклой модели расхода топлива транспортного средства. В некоторых примерах, модель расхода топлива транспортного средства также может называться картой. Вертикальная ось представляет собой расход топлива, подаваемого в двигатель. Горизонтальная ось представляет собой крутящий момент двигателя. Ось, направленная внутрь листа бумаги, представляет собой частоту вращения двигателя. Модель расхода топлива транспортного средства сохраняет полученные эмпирически значения расхода топлива или использует расход, соответствующий выбранным значениям частоты вращения и крутящего момента двигателя. Соединенные друг с другом значения расхода топлива образуют показанную невыпуклую поверхность, если смотреть в перспективе горизонтальной оси. Выдаваемое описанным со ссылкой на фиг. 6А - фиг. 8 контроллером решение крутящего момента может считаться решением крутящего момента типа «разгон-накат». Запрос крутящего момента имеет форму импульса, растущего от нулевого крутящего момента, запрашиваемого на колесах транспортного средства, до значений крутящего момента, превышающих те значения, которые были бы при движении того же самого транспортного средства по тому же маршруту, но с выпуклой моделью расхода топлива. То есть, для одного и того же транспортного средства, движущегося по одному и тому же маршруту в одних и тех же условиях за исключением геометрической формы модели расхода топлива, описанный со ссылкой на фиг. 6А - фиг. 8 контроллер выдает постоянное решение крутящего момента для выпуклой модели расхода топлива и решение крутящего момента для невыпуклой модели расхода топлива. Решение крутящего момента типа «разгон-накат» время от времени требует нулевого момента на колесах транспортного средства, например тогда, когда транспортное средство движется по инерции или накатом. Задействование нейтрального положения трансмиссии может быть особенно полезным для невыпуклых моделей расхода топлива, так как задействование нейтрального положения трансмиссии может продлить период движения накатом или период нулевого крутящего момента. То есть, по геометрической форме модели расхода топлива транспортного средства может быть определено решение крутящего момента, выдаваемое контроллером (например, постоянный крутящий момент или крутящий момент типа «разгон-накат»).
На фиг. 10 показан пример последовательности управления транспортным средством в режиме круиз-контроля для системы, показанной на фиг. 1 - фиг. 5, и способа, раскрытого со ссылкой на фиг. 6А - фиг. 8. Вертикальными метками Т1-Т4 показаны контрольные моменты времени в ходе выполнения последовательности. Все графики построены для одного и того же времени и для одних и тех же условий эксплуатации транспортного средства. В режиме круиз-контроля, команда крутящего момента для подачи на колеса транспортного средства или запрос крутящего момента от источника двигательной энергии обеспечиваются посредством контроллера, а не самим водителем, управляющим транспортным средством. В режиме круиз-контроля контроллер имеет цели, которые влияют на выдаваемый им запрос крутящего момента, и эти цели могут быть по меньшей мере заданы ограничениями, например, такими, чтобы расход топлива был минимальным, чтобы скорость движения транспортного средства была в пределах от верхнего до нижнего пороговых значений, задающих требуемых скоростной диапазон транспортного средства, чтобы выгодно использовалось нейтральное положение трансмиссии, чтобы период нахождения трансмиссии в нейтральном положении был максимально длительным, чтобы крутящий момент на колесах был максимальным. В режиме круиз-контроля контроллер может варьировать запрос крутящего момента для выдерживания скорости движения транспортного средства в требуемом скоростном диапазоне без того, чтобы водитель осуществлял ввод в контроллер или без того, чтобы водитель запрашивал крутящий момент от источника двигательной энергии. То есть, команда крутящего момента в режиме круиз-контроля может определяться запрошенной водителем требуемой скоростью движения транспортного средства. Для достижения требуемой скорости движения транспортного средства контроллер может регулировать выходной крутящий момент источника двигательной энергии.
Первый сверху график на фиг. 10 является графиком изменения по времени расчетной максимальной длительности задействования нейтрального положения трансмиссии. Максимальная длительность задействования нейтрального положения трансмиссии соответствует времени, на протяжении которого трансмиссия может находиться в нейтральном положении одновременно с выдерживанием скорости движения транспортного средства в пределах требуемого скоростного диапазона. Максимальная длительность задействования нейтрального положения трансмиссии может быть оценена посредством модели так, как это раскрыто в способе, показанном на фиг. 6А - фиг. 8. По горизонтальной оси отложено время, увеличивающееся слева направо. По вертикальной оси отложена максимальная длительность задействования нейтрального положения трансмиссии, которая увеличивается в направлении, указанном стрелкой вертикальной оси. Линией 1002 показана пороговая максимальная длительность, которая должна быть превышена, чтобы трансмиссии, находящейся на передаче, была дана команда переключения в нейтральное положение.
Второй сверху график на фиг. 10 является графиком изменения по времени расчетной выгоды от использования нейтрального положения трансмиссии. Выгода от использования нейтрального положения трансмиссии соответствует экономии топлива транспортного средства, получаемой от переключения трансмиссии в нейтральное положение. Выгода от использования нейтрального положения трансмиссии может быть оценена путем определения экономии топлива транспортного средства от переключения трансмиссии в нейтральное положение. По горизонтальной оси отложено время, увеличивающееся слева направо. По вертикальной оси отложена выгода от использования нейтрального положения трансмиссии, которая увеличивается в направлении, указанном стрелкой вертикальной оси. Линией 1002 показана пороговая выгода от использования нейтрального положения трансмиссии, которая должна быть превышена, чтобы трансмиссии, находящейся на передаче, была дана команда - переключения в нейтральное положение.
Третьим сверху графиком на фиг. 10 является график изменения по времени состояния трансмиссии. Состояние трансмиссии указывает на то, находится ли трансмиссия в нейтральном положении или на передаче. По горизонтальной оси отложено время, увеличивающееся слева направо. По вертикальной оси отложено состояние трансмиссии. Трансмиссия находится в нейтральном положении, если линия графика идет на верхнем уровне вблизи стрелки вертикальной оси. Трансмиссия находится на передаче, если линия графика идет на нижнем уровне вблизи горизонтальной оси.
Четвертый сверху график на фиг. 10 является графиком изменения по времени скорости движения транспортного средства. По горизонтальной оси отложено время, увеличивающееся слева направо. По вертикальной оси отложена скорость движения транспортного средства, которая увеличивается в направлении, указанном стрелкой вертикальной оси. Линией 1006 представлена нижняя пороговая скорость транспортного средства. Целью контроллера круиз-контроля транспортного средства является поддержание скорости движения транспортного средства выше порогового значения при работе транспортного средства в режиме круиз контроля.
В момент Т0 времени транспортное средство работает в режиме круиз-контроля. Максимальная длительность нахождения трансмиссии в нейтральном положении увеличивается от среднего уровня, а скорость движения транспортного средства уменьшается с более высокого уровня в пределах требуемого скоростного диапазона круиз-контроля. Такие условия могут указывать на то, что транспортное средство заканчивает подъем в гору. Выгода использования нейтрального положения трансмиссии увеличивается с низкого уровня, а трансмиссия находится на передней передаче.
В промежутке между моментами Т0 и Т1 времени скорость движения транспортного средства продолжает снижаться, а максимальная длительность нахождения трансмиссии в нейтральном положении увеличивается до значения, превышающего порог 1002. Выгода от использования нейтрального положения трансмиссии остается ниже порога 1004, а трансмиссия остается на передней передаче. Состояние трансмиссии не изменяется даже при превышении максимальной длительностью нахождения трансмиссии в нейтральном положении порога 1002 в некоторые моменты времени, так как выгода от использования нейтрального положения трансмиссии не превышает своего порога 1004.
В момент Т1 времени трансмиссия изменяет состояние из нахождения на передней передачи на нахождение в нейтральном положении. Трансмиссия переключается в нейтральное положение в ответ на то, что максимальная длительность нахождения в нейтральном положении превышает порог 1002, а выгода от использования нейтрального положения превышает порог 1004. Скорость движения транспортного средства начинает медленно снижаться в ответ на нахождение трансмиссии в нейтральном положении.
В промежутке времени между моментами Т1 и Т2 скорость движения транспортного средства продолжает снижаться, а трансмиссия продолжает оставаться в нейтральном положении. Максимальная длительность нахождения в нейтральном положении падает ниже порога 1002, а выгода от использования нейтрального положения трансмиссии падает ниже порога 1004. Тем не менее, трансмиссия остается в нейтральном положении для продления выгоды в экономии топлива за счет движения накатом или по инерции.
В момент Т2 времени скорость движения транспортного средства снижается до порогового уровня 1006 и трансмиссия переключается на переднюю передачу в ответ на то, что скорость транспортного средства находится на пороговом уровне 1006 или ниже него. Максимальная длительность нахождения трансмиссии в нейтральном положении меньше порогового уровня 1002, а выгода от использования нейтрального положения трансмиссии менее порогового уровня 1004.
В промежутке времени между моментами Т2 и Т3 трансмиссия остается задействованной на передней передаче и скорость транспортного средства растет. Максимальная длительность нахождения трансмиссии в нейтральном положении также превышает порог 1002. Выгода от использования нейтрального положения трансмиссии менее порогового значения 1004. Трансмиссия не переходит в нейтральное положение, так как порог 1004 не превышен.
В момент Т3 времени состояние трансмиссии изменяется с нахождения на передней передаче на нахождение в нейтральном положении. Трансмиссия переключается в нейтральное положение в ответ на то, что максимальная длительность нахождения в нейтральном положении превышает порог 1002, а выгода использования нейтрального положения трансмиссии превышает порог 1004. В ответ на нейтральное положение трансмиссии скорость движения транспортного средства начинает медленно снижаться.
В промежутке времени между моментами Т3 и Т4 скорость движения транспортного средства продолжает снижаться, а трансмиссия продолжает оставаться в нейтральном положении. Максимальная длительность нахождения трансмиссии в нейтральном положении падает ниже порога 1002, а выгода от использования нейтрального положения трансмиссии падает ниже порога 1004. Трансмиссия остается в нейтральном положении для продления выгоды в экономии топлива за счет движения накатом или по инерции.
В момент Т4 времени скорость движения транспортного средства снижается до порогового уровня 1006 и трансмиссия переключается на переднюю передачу в ответ на то, что скорость транспортного средства находится на пороговом уровне 1006 или ниже него. Максимальная длительность нахождения трансмиссии в нейтральном положении ниже порогового уровня 1002, а выгода от использования нейтрального положения трансмиссии ниже порогового уровня 1004.
Таким образом, для увеличения экономии топлива трансмиссию можно избирательно переключать в нейтральное положение и обратно. Контроллер транспортного средства избирательно производит переключение в нейтральное положение в зависимости от условий эксплуатации транспортного средства, а также значения уклона дороги или крутизны дороги в горизонте прогнозирования или электронном горизонте. Контроллер может выполнять действия по переключению трансмиссии в нейтральное положение в ответ на отрицательный уклон дороги и другие условия эксплуатации транспортного средства. Кроме того, контроллер может выполнять действия по переключению трансмиссии в нейтральное положение в ответ на изменение уклона дороги с положительного на отрицательный или нулевой уклон, что будет определено по горизонту прогнозирования или электронному горизонту.
Отметим, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Кроме того, раскрытие здесь способы могут быть сочетанием предпринимаемых в реальном мире действий контроллера и инструкций внутри контроллера. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут исполняться системой управления, содержащей контроллер в сочетании с разнообразными датчиками, исполнительными устройствами и другой аппаратной частью двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Что подразумевает, что проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия операции и/или функции могут графически изображать код, программируемый в долговременной памяти устройстве машиночитаемой компьютерной среды хранения в системе управления двигателем, в которой раскрытие действия выполняют, исполняя инструкции в системе, содержащей разнообразные компоненты аппаратной части двигателя в сочетании с электронным контроллером.
На том раскрытие завершается. Прочтя его, специалисты в данной области техники могут продумать многие изменения и модификации, не выходящие за пределы объема и сути настоящего раскрытия. Например, настоящее раскрытие можно с выгодой использовать в двигателях I3, I4, I5, V6, V8, V10, и V12, работающих на природном газе, бензине, дизельном топливе, или на других видах топлива.
В нижеследующей формуле изобретения, в частности, внимание сосредоточено на определенных сочетаниях компонентов и производных сочетаниях компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты включают в себя один или более указанных элементов, не требуя, и не исключая двух или более таких элементов. Иные сочетания и производные сочетания раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем поправки имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи исходной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА В РЕЖИМЕ КРУИЗ-КОНТРОЛЯ | 2017 |
|
RU2748955C2 |
| СИСТЕМА КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2678416C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ДЛЯ РЕГЕНЕРАЦИИ БЕНЗИНОВОГО САЖЕВОГО ФИЛЬТРА | 2016 |
|
RU2689256C2 |
| ПРОГНОЗНОЕ УПРАВЛЕНИЕ НА ОСНОВЕ АДАПТИВНОЙ МОДЕЛИ ДЛЯ ПЛАНИРОВАНИЯ МАРШРУТА АВТОМОБИЛЯ | 2015 |
|
RU2701620C2 |
| СПОСОБ ОБУЧЕНИЯ ПО ОШИБКЕ ОБРАТНОЙ СВЯЗИ В НЕЛИНЕЙНЫХ СИСТЕМАХ (ВАРИАНТЫ) | 2014 |
|
RU2670551C2 |
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ ДОРОЖНЫХ ХАРАКТЕРИСТИК В РЕГИОНЕ, В КОТОРОМ ДВИЖЕТСЯ ТРАНСПОРТНОЕ СРЕДСТВО, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2560825C1 |
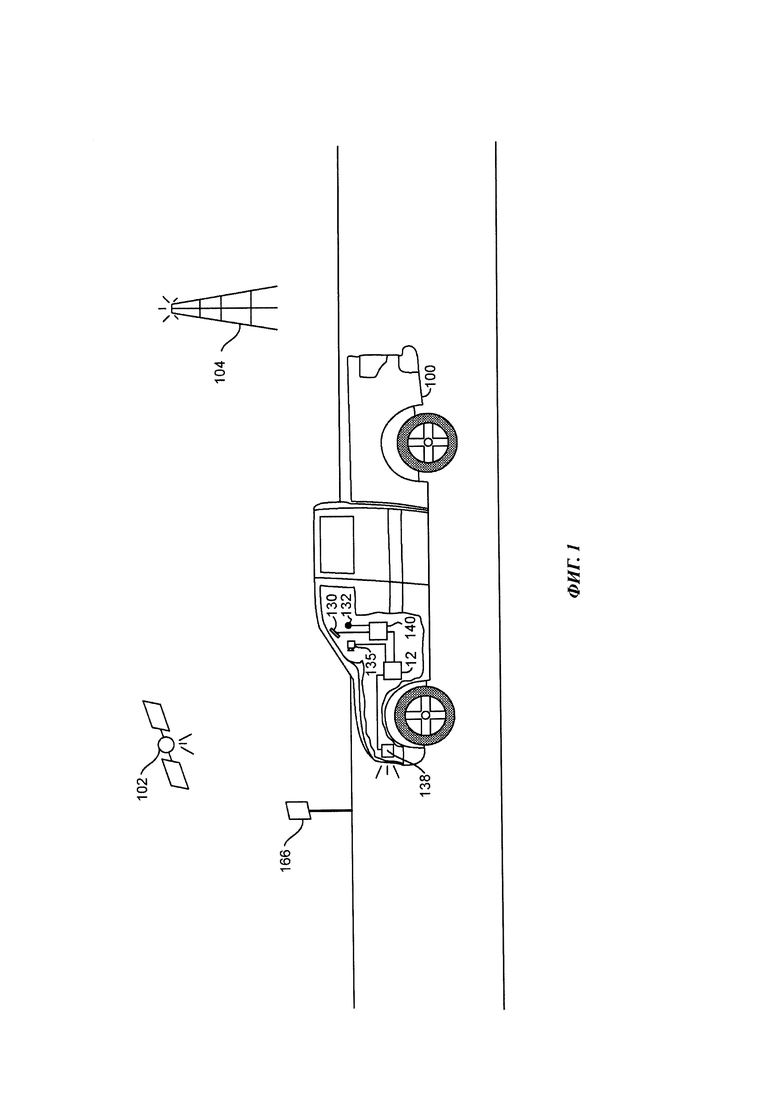
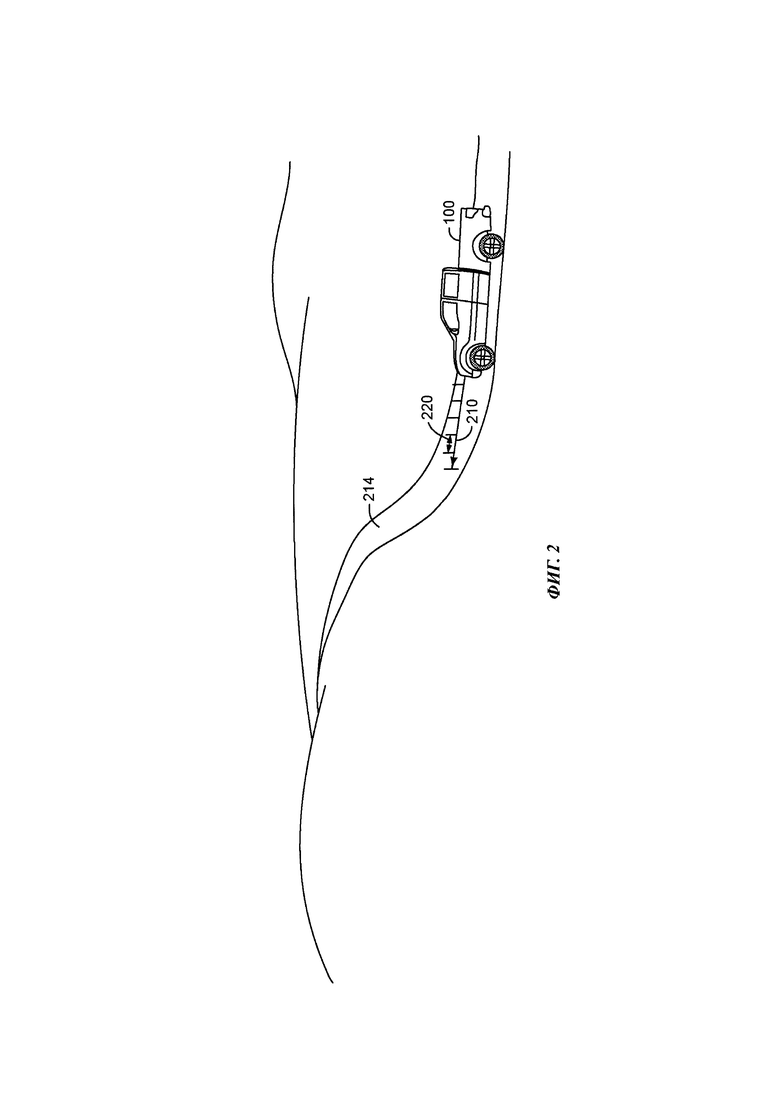
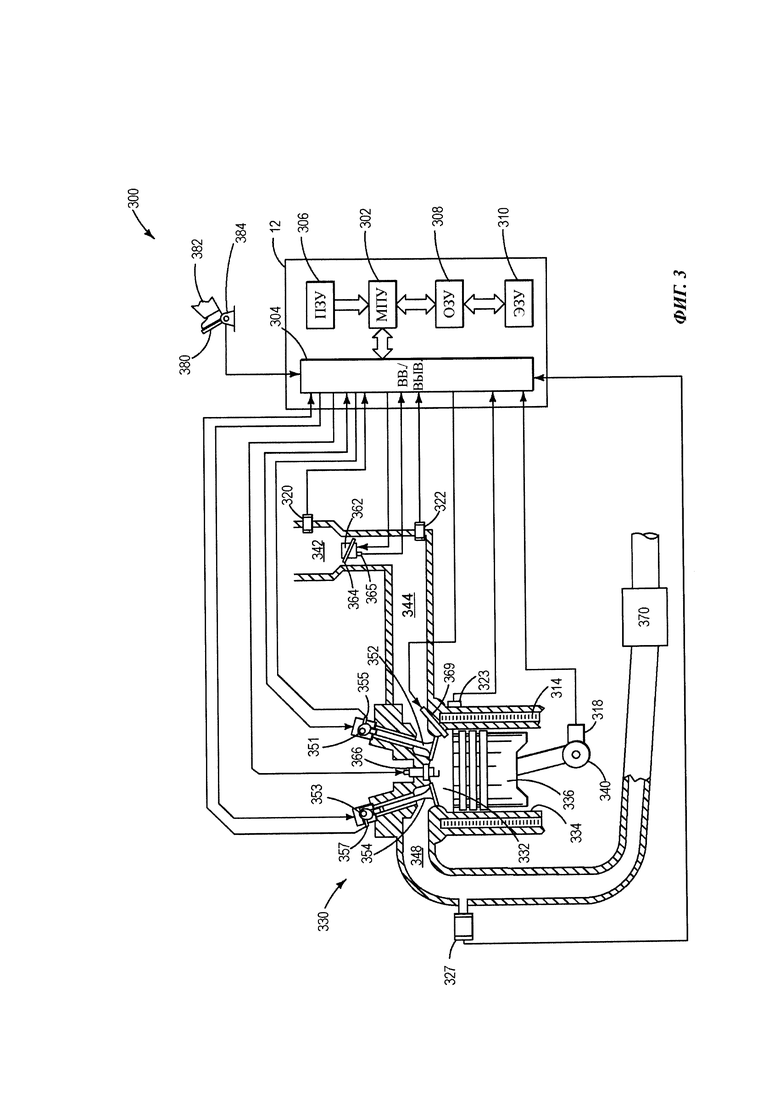
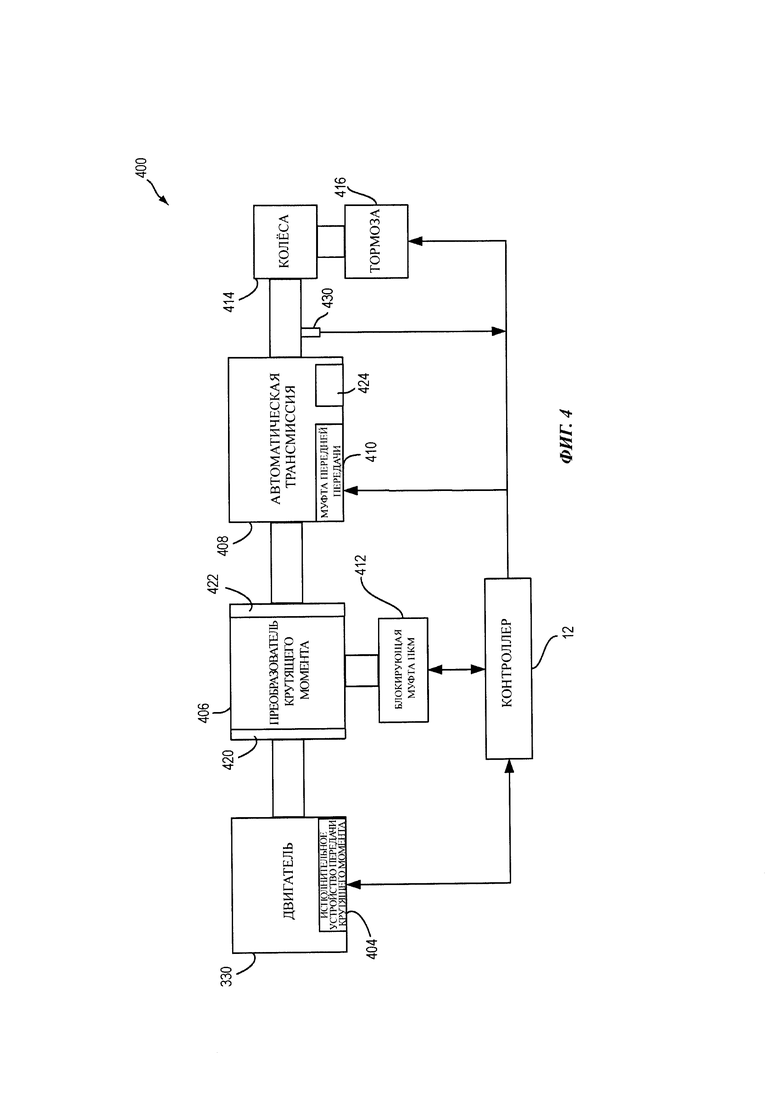
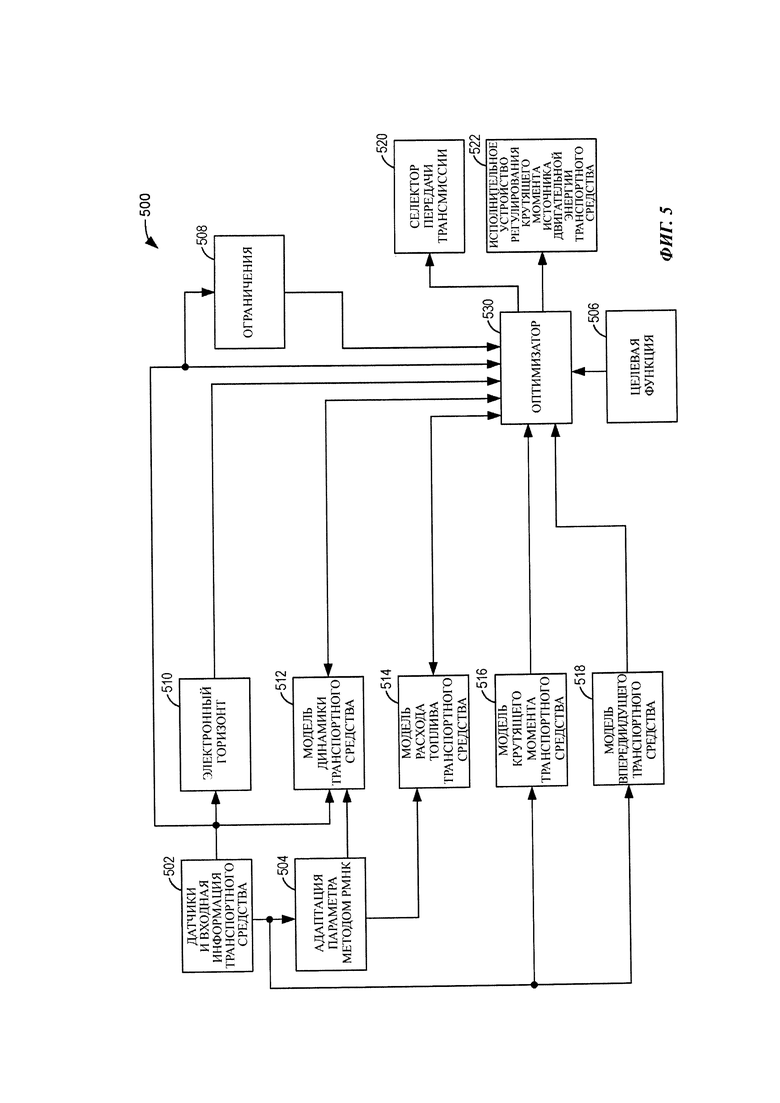
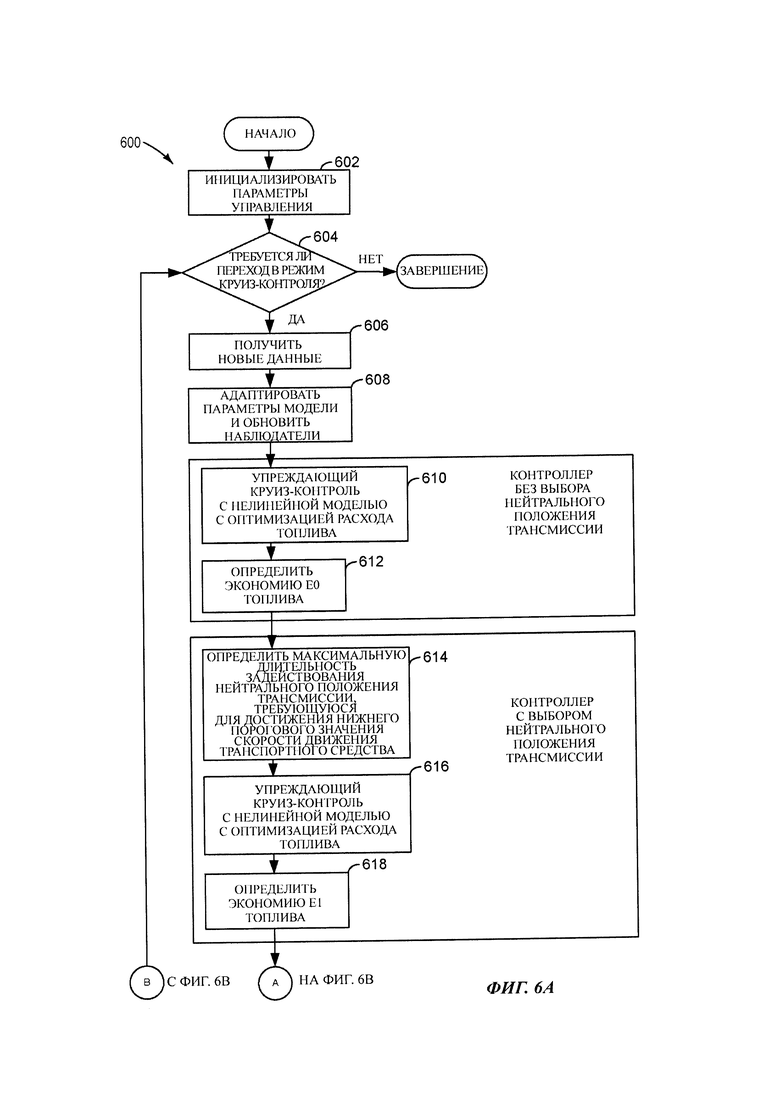
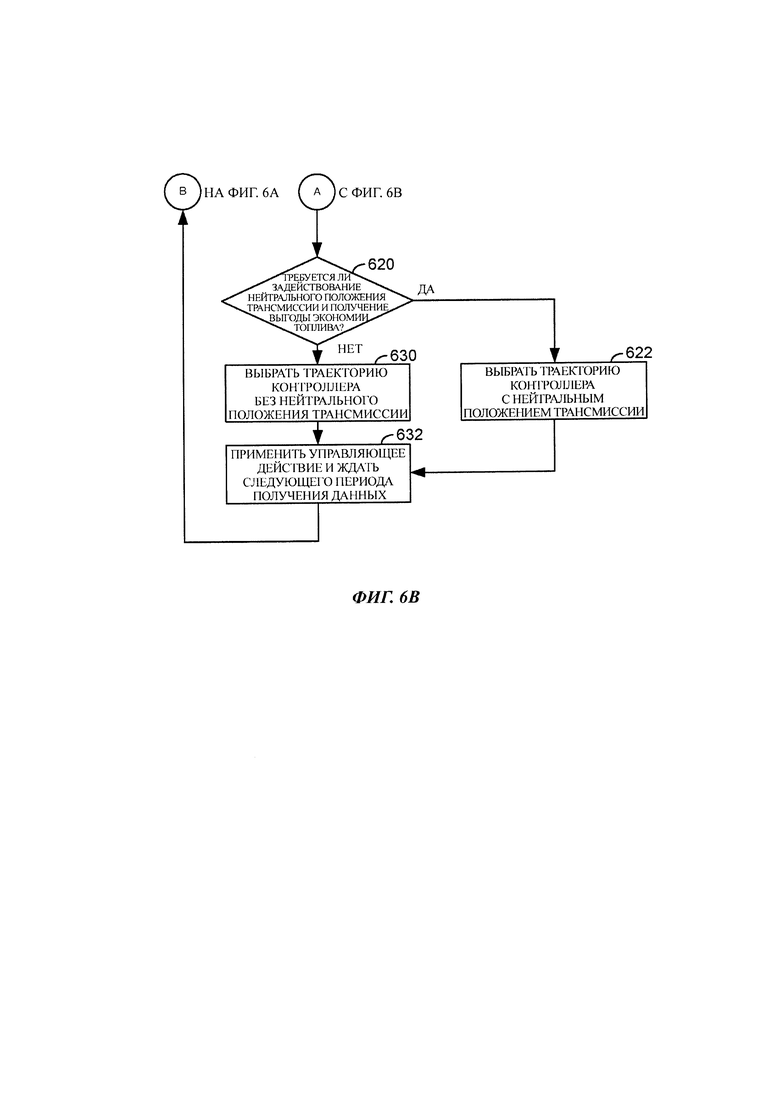
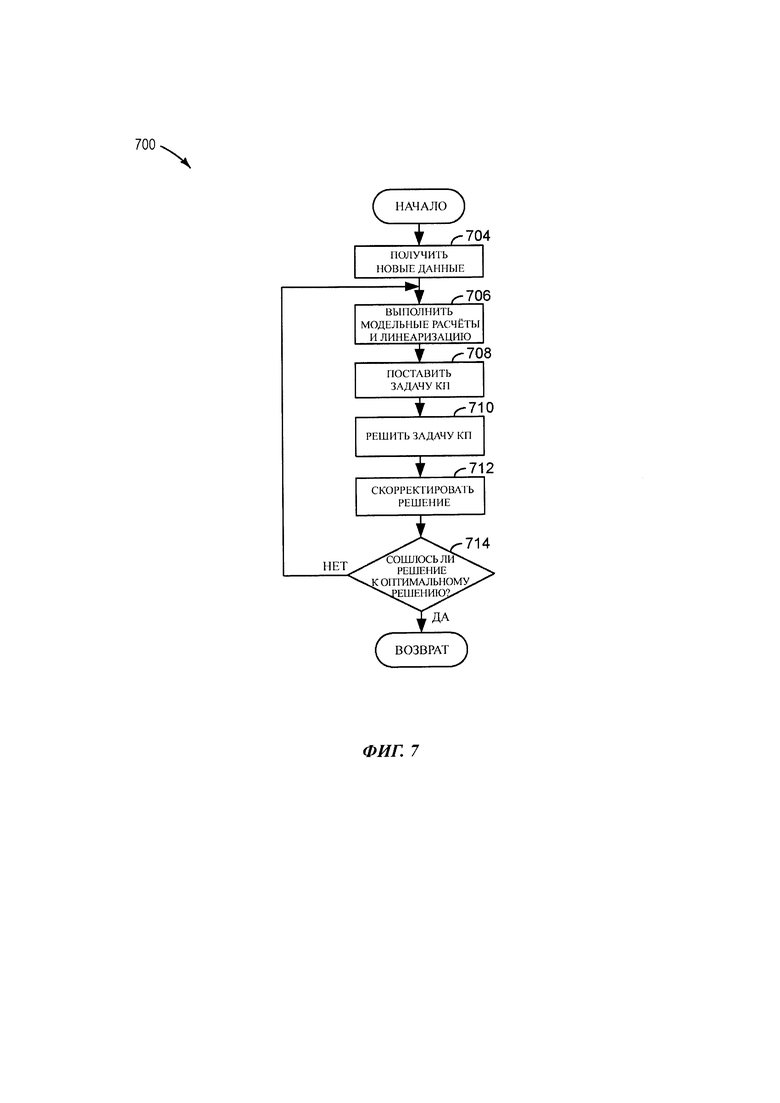
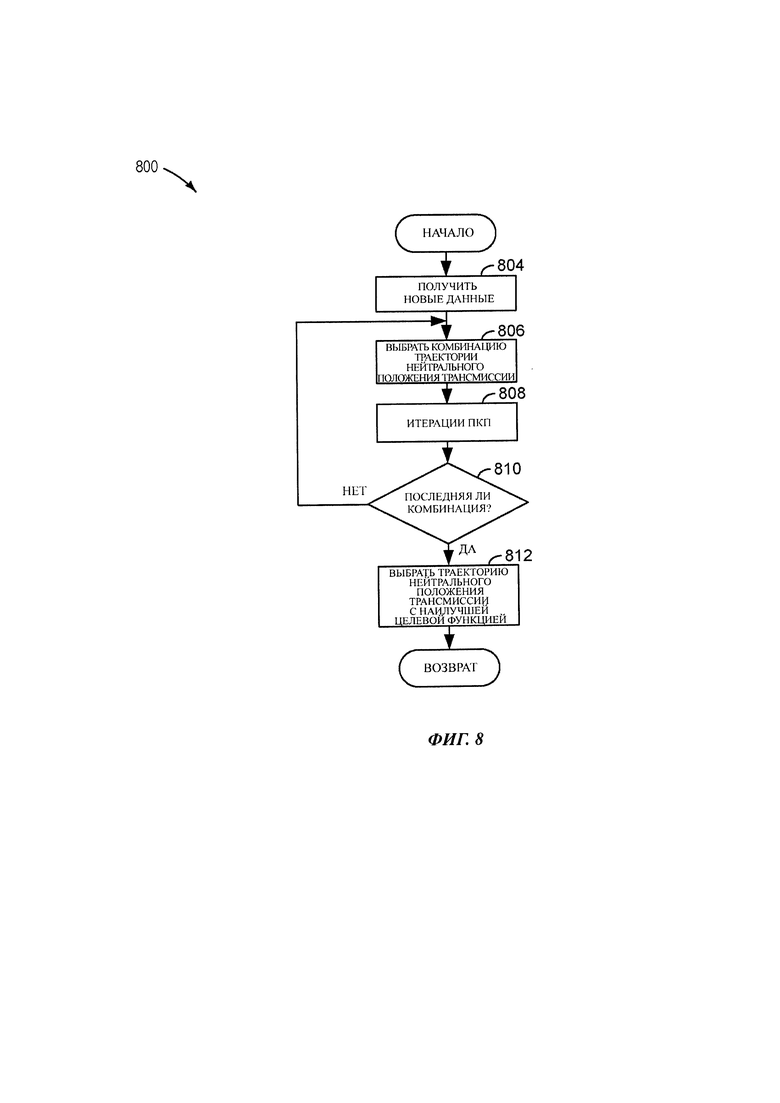
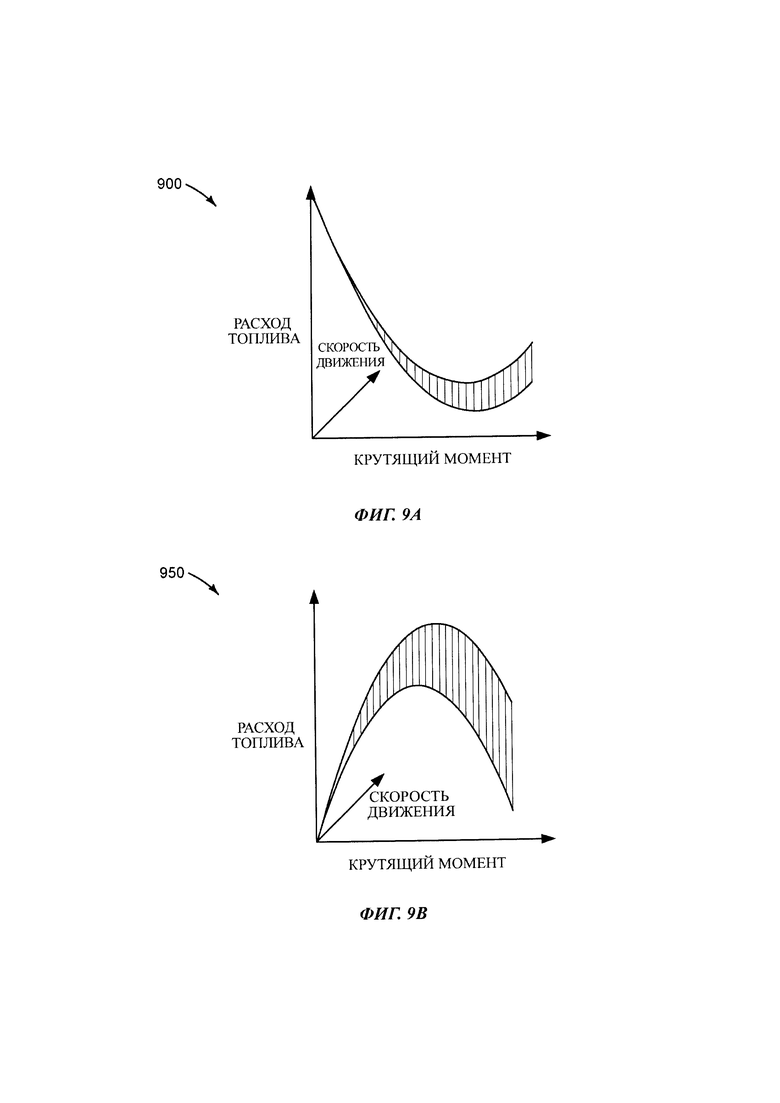
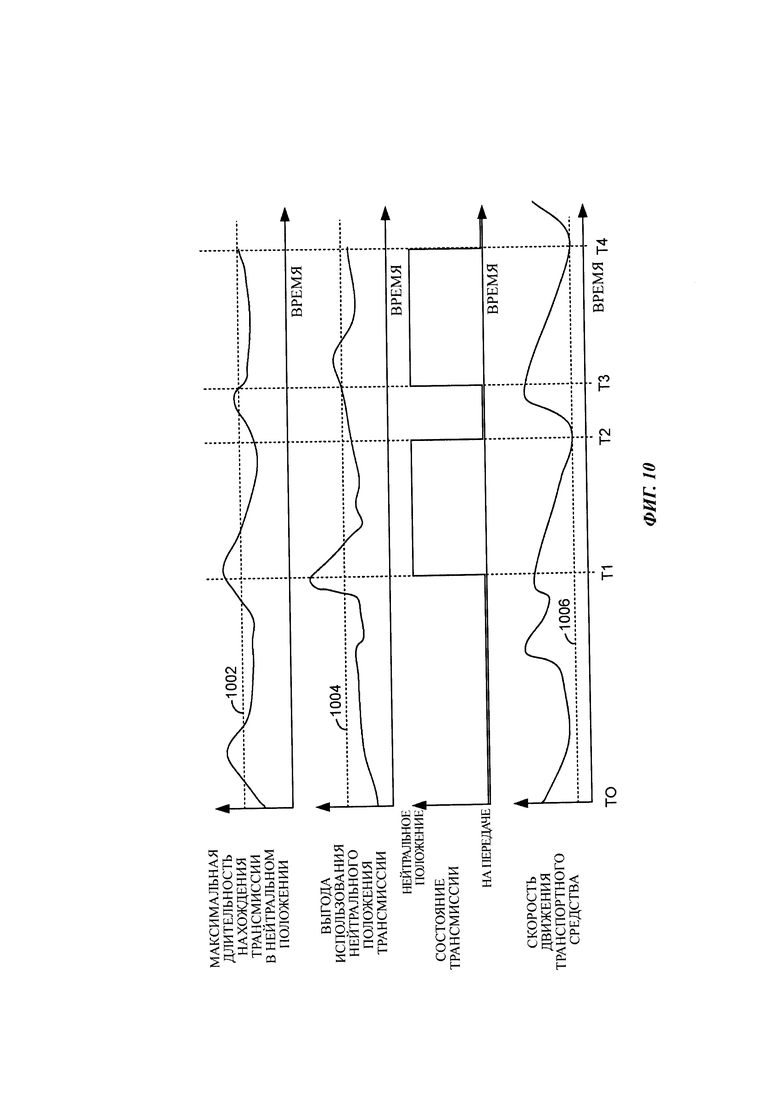
Представлены способы и системы, предназначенные для улучшения эксплуатационных характеристик транспортного средства, работающего в режиме круиз-контроля, в котором контроллер регулирует выходной крутящий момент от транспортного средства для выдерживания скорости движения транспортного средства в требуемом диапазоне. Способы и системы включают в себя адаптацию модели динамики транспортного средства и модели расхода топлива транспортного средства, которые обеспечивают входной информацией упреждающий контроллер с нелинейной моделью. 3 н. и 17 з.п. ф-лы, 12 ил.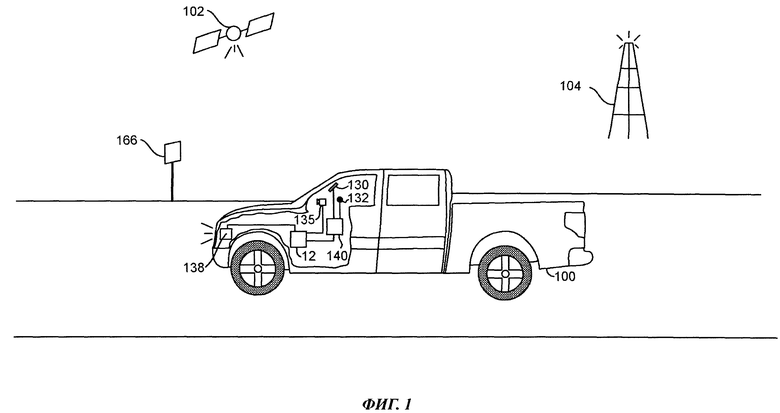
1. Система круиз-контроля транспортного средства, содержащая:
транспортное средство, содержащее источник двигательной энергии;
трансмиссию, соединенную с источником двигательной энергии и выполненную с возможностью переключения в нейтральное положение и на переднюю передачу; и
контроллер в транспортном средстве, содержащий хранящиеся в долговременной памяти исполняемые инструкции, включающие в себя алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью, причем контроллер содержит дополнительные инструкции для:
эксплуатации трансмиссии в режиме передней передачи в ответ на выпуклую модель расхода топлива транспортного средства, и
эксплуатации трансмиссии в нейтральном положении в ответ на невыпуклую модель расхода топлива транспортного средства.
2. Система по п. 1, в которой алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью включает в себя модель динамики транспортного средства и инструкции для адаптации модели динамики транспортного средства.
3. Система по п. 2, в которой модель динамики транспортного средства адаптирована по рекурсивному методу наименьших квадратов.
4. Система по п. 1, в которой алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью включает в себя инструкции для адаптации модели расхода топлива транспортного средства.
5. Система по п. 4, в котором модель расхода топлива транспортного средства адаптирована по рекурсивному методу наименьших квадратов.
6. Система по п. 1, в которой алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью выполнен с возможностью адаптации модели динамики транспортного средства и модели расхода топлива транспортного средства в режиме реального времени при эксплуатации транспортного средства в пути в режиме круиз-контроля.
7. Система по п. 1, в которой алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью выполнен с возможностью выдачи запроса крутящего момента источнику двигательной энергии.
8. Система круиз-контроля транспортного средства, содержащая:
транспортное средство, содержащее источник двигательной энергии;
трансмиссию, соединенную с источником двигательной энергии и выполненную с возможностью переключения в нейтральное положение и на переднюю передачу; и
контроллер в транспортном средстве, причем контроллер содержит хранящиеся в долговременной памяти исполняемые инструкции, включающие в себя алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью с возможностью активации нейтрального состояния трансмиссии.
9. Система по п. 8, в которой инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для оценивания параметров эксплуатации транспортного средства с нейтральным положением трансмиссии.
10. Система по п. 8, в которой инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для оценивания параметров эксплуатации транспортного средства в дорожных условиях, ожидаемых в будущем для данного транспортного средства.
11. Система по п. 10, в которой инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для оценивания параметров эксплуатации транспортного средства в дорожных условиях, ожидаемых в будущем для данного транспортного средства, в соответствии с горизонтом прогноза, основанном на картированных дорожных условиях.
12. Система по п. 8, в которой инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для выдачи команды источнику двигательной энергии.
13. Система по п. 8, в которой инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для регулирования команды, подаваемой источнику двигательной энергии, на основе данных, полученных от впередиидущего транспортного средства, эксплуатируемого на той же дороге, что и данное транспортное средство.
14. Система по п. 8, в которой инструкции алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью включают в себя инструкции для определения оптимального профиля скорости движения транспортного средства и соответствующего профиля крутящего момента на основе спрогнозированного уклона дороги спереди от текущего местоположения транспортного средства.
15. Способ круиз-контроля транспортного средства, включающий в себя следующие этапы:
получают в контроллер информацию о транспортном средстве от одного или более датчиков транспортного средства;
обеспечивают команду крутящего момента и команду трансмиссии по результату выполненного контроллером алгоритма упреждающего круиз-контроля с адаптивной нелинейной моделью, при этом алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью адаптируют на основе информации о транспортном средстве;
регулируют исполнительное устройство передачи крутящего момента источника двигательной энергии в ответ на команду крутящего момента;
регулируют выбор передачи трансмиссии в ответ на команду трансмиссии; и,
в случае невыпуклой модели расхода топлива транспортного средства: в ответ на увеличение скорости транспортного средства до верхнего порогового значения, устанавливают выбор передачи на нейтральное положение, и устанавливают исполнительное устройство передачи крутящего момента на выдачу крутящего момента холостого хода, с обеспечением движения транспортного средства накатом, и
в ответ на уменьшение скорости транспортного средства до нижнего порогового значения, устанавливают выбор передачи на переднюю передачу, устанавливают исполнительное устройство передачи крутящего момента на выдачу крутящего момента большего, чем крутящий момент холостого хода, с обеспечением ускорения транспортного средства.
16. Способ по п. 15, в котором при работе транспортного средства в режиме круиз-контроля, алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью обеспечивает избирательное переключение трансмиссии транспортного средства в нейтральное положение.
17. Способ по п. 15, в котором команда крутящего момента находится в пределах первого диапазона пороговых значений, ограниченного первым нижним пороговым значением крутящего момента и первым верхним пороговым значением крутящего момента, если алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью получает данные из выпуклой модели расхода топлива транспортного средства, когда транспортное средство работает при первом наборе условий.
18. Способ по п. 17, в котором команда крутящего момента находится в пределах второго диапазона пороговых значений, ограниченного вторым нижним пороговым значением крутящего момента и вторым верхним пороговым значением крутящего момента, если алгоритм упреждающего круиз-контроля с адаптивной нелинейной моделью получает данные из невыпуклой модели расхода топлива транспортного средства, когда транспортное средство работает при первом наборе условий, причем второй диапазон пороговых значений шире первого диапазона пороговых значений, при этом второе нижнее пороговое значение крутящего момента меньше первого нижнего порогового значения крутящего момента.
19. Способ по п. 15, в котором источником двигательной энергии является двигатель, причем команду крутящего момента определяют на основе горизонта прогнозирования, при этом горизонт прогнозирования содержит данные об уклоне дороги.
20. Способ по п. 19, в котором команду крутящего момента дополнительно определяют на основе состояния транспортного средства, идущего впереди транспортного средства, содержащего данный контроллер.
| WO 2014149044 A1, 25.09.2014 | |||
| DE 102011054339 A1, 26.04.2012 | |||
| US 6363316 B1, 26.03.2002 | |||
| US 2010049400 A1, 25.01.2010. |

