Изобретение относится к области радиотехники, а именно к пассивным системам радиомониторинга РЭС и, в частности, может быть использовано в системах местоопределения источников радиоизлучения.
Известен способ местоопределения источника радиоизлучения (ИРИ) (см, например, Патент на изобретение №2363011, G01S 5/12. Способ местоопределения источника радиоизлучения / Козирацкий Ю.Л., Козирацкий А.Ю., Ляхов П.Р., Кулешов П.Е. и др., опубликован 27.07.2009. Бюл. №21), основанный на измерении корреляционным методом временных задержек приема сигнала ИРИ относительно одного из пространственно разнесенных пунктов радиоконтроля (ПРК), при этом один из ПРК является опорным и осуществляет прием и обработку сигналов, дополнительной доставке в предполагаемый район местонахождения ИРИ носителями кассет, каждая из которых содержит навигационный приемник и функционирующие в системе привязки к единому времени панорамно-приемное устройство (ППрУ) и передающее устройство (ПдУ), которые после фиксации носителей в грунте автоматически приводятся в работоспособное состояние, передаче координат точки доставки каждой кассеты через спутник-ретранслятор на опорный ПРК, одновременном включении по сигналу опорного ПРК ППрУ и осуществлении частотного поиска сигналов ИРИ, оцифровке и передаче обнаруженного сигнала каждым ППрУ ИРИ соответствующими ПдУ на соответствующие ПРК, определении на опорном ПРК по поступившим данным местоположения ИРИ относительно координат навигационных приемников. Недостатком указанного способа является недостаточная точность определения координат ИРИ, обусловленная использованием для этой цели оценки относительных временных задержек принимаемых сигналов. При этом ошибка координат местоположения ИРИ складывается из трех основных погрешностей: погрешности синхронизации функционирования (привязки к единому времени), погрешности определения координат местоположения ППрУ и погрешности измерения момента времени обнаружения (прихода) сигналов ИРИ. Наряду с этим недостатком в рассматриваемом способе не производится анализ взаимного расположения доставленных ППрУ в район размещения ИРИ. Это, в свою очередь, также может привести к снижению точности оценки координат ИРИ, т.к. требования к формированию базы взаимной установки ППрУ могут быть не выполнены.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение точности определения координат ИРИ, размещенных в труднодоступной местности.
Технический результат достигается тем, что в известном способе определения координат местоположения ИРИ, основанном на измерении относительных временных задержек приема сигналов ИРИ минимум тремя пространственно разнесенными ПРК, при этом один из ПРК является опорным, информационном сопряжении ПРК со средством запуска носителей кассет, каждая из которых включает средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных, информационно связанных с опорным ПРК, определяют с учетом требований базы координаты областей формирования М≥2 пеленгационных постов (ПП) в районе размещения ИРИ, где М - число ПП, значение которых передают на средство запуска носителей кассет, запуском носителей доставляют в каждую заданную область формирования ПП К≥2 кассет, где К - число кассет одного ПП, средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных которых после фиксации в грунте автоматически приводят в работоспособное состояние, определяют координаты доставки кассет и их значения передают на опорный ПРК, измеряют частоту и фазу принятого сигнала ИРИ каждым средством поиска, обнаружения и определения параметров сигналов ИРИ, значения которых передают на опорный ПРК, где определяют координаты местоположения ИРИ.
Сущность изобретения заключается в доставке в предполагаемый район нахождения ИРИ элементов пеленгации с учетом их взаимного расположения на местности и формирования угломерной системы определения местоположения. При этом угломерная система определения местоположения ИРИ формируется путем доставки ПП с учетом пространственных требований базы угломерной системы (см., например, Гришин Ю.П., Ипатов В.П., Казаринов Ю.М. Радиотехнические системы. - М.: «Высшая школа», 1990, стр. 378-379), состоящих минимум из двух измерительных элементов, осуществляющих оценку фазы принимаемого сигнала. На борту каждого носителя размещены средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных. Для формирования одного ПП производится запуск по заданным координатам области доставки в район размещения ИРИ минимум двух носителей. После фиксации в грунте и приведения в работоспособное состояние с помощью средств радионавигационного определения координат определяют координаты местоположения средств поиска, обнаружения и определения параметров сигналов ИРИ, значения которых передают на опорный ПРК. Средства поиска, обнаружения и определения параметров сигналов каждого ПП осуществляют частотный поиск сигналов ИРИ и в случае их обнаружения измеряют значение фазы и частоты. Значения фазы и частоты принятого сигнала средства поиска, обнаружения и определения параметров сигналов ИРИ передают на опорный ПРК. Опорный ПРК на основе этих принятых данных определяет координаты местоположения ИРИ относительно координат точек доставки элементов ПП.
Наибольшую точность определения пространственных параметров ИРИ обеспечивают системы координатного мониторинга, основанные на фазовых методах пеленгации (см., например, Саидов А.С., Тагилаев А.Р., Алиев Н.М. и др. Проектирование автоматических фазовых радиопеленгаторов. М.: «Радио и связь», 1997, стр. 11, Кукес И.С., Старик М.Е. Основы радиопеленгации. М.: «Советское радио», 1964, стр. 496-499). При этом формирование угломерной системы исключает зависимость точности оценки координат местоположения ИРИ от синхронизации функционирования элементов ее построения, присущей разностно-дальномерной системе (см., например, Рембовский A.M., Ашихмин А.В., Козьмин В.А. Радиомониторинг, задачи, методы, средства. М.: «Горячая линия-Телеком», 2006, стр. 310-311). Учитывая перечисленное выше, формирование угломерной системы координатного мониторинга ИРИ на основе оценки фазы принятого сигнала позволяет повысить в совокупности точность определения местоположения ИРИ забрасываемыми в район его размещения элементами радиоконтроля.
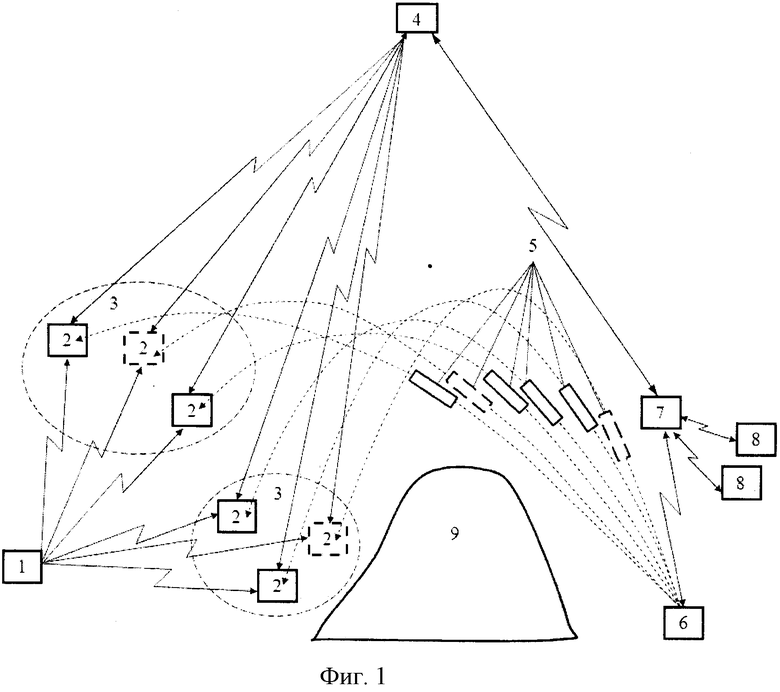
Заявленный способ поясняется схемой, представленной на фигуре 1. На фигуре 1 приняты следующие обозначения: 1 - ИРИ, местоположение которого определяется; 2 - кассета со средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных; 3 - ПП; 4 - ретранслятор; 5 - носитель средств поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных; 6 - средство запуска носителей; 7 - опорный ПРК; 8 - ПРК; 9 - препятствие, ограничивающее зону приема сигналов ИРИ.
Функционирование системы местоопределения ИРИ в соответствии с данным способом происходит следующим образом. Опорный ПРК 7 с помощью взаимосвязанных ПРК 8 осуществляет поиск и оценку координат местоположения ИРИ. При необходимости увеличения дальности (электромагнитной доступности ИРИ, ограниченной препятствием 9) ведения радиоконтоля опорный ПРК 7 определяет координаты областей формирования ПП 3 в районе размещения ИРИ 1 с учетом пространственных требований к базе фазовой угломерной системы. Значения координат областей формирования ПП 3 в районе размещения ИРИ 1 опорный ПРК 7 передает на средство запуска носителей 6, которое осуществляет доставку кассет со средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных 2. При этом формируются минимум два ПП 3 доставкой в район размещения ИРИ минимум двух носителей кассет со средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных 2. Средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных 2 после фиксации в грунте автоматически приводятся в работоспособное состояние. Средства радионавигационного определения координат 2 определяют координаты своего местоположения, значения которых с использованием средств приемопередачи данных 2 передают через ретранслятор 4 на опорный ПРК 7. Средства поиска, обнаружения и определения параметров сигналов ИРИ 2 каждого ПП 3 осуществляют частотный поиск сигналов ИРИ 1 и в случае их обнаружения измеряют значение фазы. Значения фазы и частоты принятого сигнала средства поиска, обнаружения и определения параметров сигналов ИРИ 2 передают на опорный ПРК 7. Опорный ПРК 7 на основе этих принятых данных определяет координаты местоположения ИРИ 1 относительно координат точек доставки элементов 2 ПП 3.
Таким образом, у заявляемого способа появляются свойства, заключающиеся в повышении точности определение координат ИРИ, размещенных в труднодоступной местности, на основе забрасываемых элементов средств радиоконтроля, за счет использования оценки пространственных параметров ИРИ по фазе принятых сигналов и рационального выбора взаимного местоположения забрасываемых элементов средств радиоконтроля. Тем самым устраняются недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ определения координат местоположения ИРИ, основанный на измерении относительных временных задержек приема сигналов ИРИ минимум тремя пространственно разнесенными ПРК, при этом один из ПРК является опорным, информационном сопряжении ПРК со средством запуска носителей кассет, каждая из которых включает средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных, информационно связанных с опорным ПРК, определении с учетом требований базы координат областей формирования М≥2 ПП в районе размещения ИРИ, где М - число ПП, передаче значений координат областей формирования на средство запуска носителей кассет, доставке запуском носителей в каждую заданную область формирования ПП К≥2 кассет, где К - число кассет одного ПП, средства поиска и автоматическом приведении после фиксации в грунте в работоспособное состояние средств обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных, определении координат доставки кассет и передаче их значений на опорный ПРК, измерении частоты и фазы принятого сигнала ИРИ каждым средством поиска, обнаружения и определения параметров сигналов ИРИ и передаче их значений на опорный ПРК, определении на опорном ПРК координат местоположения ИРИ.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые средства доставки носителей кассет, радиотехнические узлы и устройства. При этом уровень элементной базы позволяет осуществить комбинирование рассматриваемых радиоэлектронных устройств в едином кассетном исполнении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2604004C2 |
| Способ координатного мониторинга источника радиоизлучения | 2016 |
|
RU2700270C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2022 |
|
RU2796963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2693936C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2759116C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2758349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ ЗЕНИТНО-РАКЕТНЫМ КОМПЛЕКСАМ | 2020 |
|
RU2755567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2643360C1 |
Изобретение относится к пассивным системам радиомониторинга радиоэлектронных средств, в частности может быть использовано в системах местоопределения источников радиоизлучения (ИРИ). Сущность способа определения координат местоположения ИРИ заключается в доставке в предполагаемый район нахождения ИРИ элементов пеленгации с учетом их взаимного расположения на местности и формирования угломерной системы определения местоположения. При этом угломерная система определения местоположения ИРИ формируется путем доставки пеленгационных постов (ПП) с учетом пространственных требований базы угломерной системы, состоящих минимум из двух измерительных элементов, осуществляющих оценку фазы принимаемого сигнала. На борту каждого носителя размещены средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных. Для формирования одного ПП производится запуск по заданным координатам доставки в район размещения ИРИ минимум двух носителей. После фиксации в грунте и приведения в работоспособное состояние с помощью средств радионавигационного определения координат определяют координаты местоположения средств поиска, обнаружения и определения параметров сигналов ИРИ, значения которых передают на опорный пункт радиоконтроля (ПРК). Средства поиска, обнаружения и определения параметров сигналов каждого ПП осуществляют частотный поиск сигналов ИРИ и в случае их обнаружения измеряют значение фазы. Значения фазы и частоты принятого сигнала средства поиска, обнаружения и определения параметров сигналов ИРИ передают на опорный пункт радиоконтроля (ПРК), в котором на основе принятых данных определяют координаты местоположения ИРИ относительно координат точек доставки элементов ПП. Техническим результатом является повышение точности определения координат ИРИ, размещенных в труднодоступной местности. 1 ил.
Способ определения координат местоположения источника радиоизлучения (ИРИ), основанный на измерении относительных временных задержек приема сигналов ИРИ минимум тремя пространственно разнесенными пунктами радиоконтроля, при этом один из пунктов радиоконтроля является опорным, информационном сопряжении пунктов радиоконтроля со средством запуска носителей кассет, каждая из которых включает средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных, информационно связанных с опорным пунктом радиоконтроля, отличающийся тем, что определяют с учетом требований базы координаты областей формирования М≥2 пеленгационных постов в районе размещения ИРИ, где М - число пеленгационных постов, значение которых передают на средство запуска носителей кассет, запуском носителей доставляют в каждую заданную область формирования пеленгационного поста К≥2 кассет, где К - число кассет одного пеленгационного поста, средства поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных которых после фиксации в грунте автоматически приводят в работоспособное состояние, определяют координаты доставки кассет и их значения передают на опорный пункт радиоконтроля, измеряют частоту и фазу принятого сигнала ИРИ каждым средством поиска, обнаружения и определения параметров сигналов ИРИ, значения которых передают на опорный пункт радиоконтроля, где определяют координаты местоположения ИРИ.
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
| РАЗНЕСЕННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ ПЕЛЕНГАТОР | 2008 |
|
RU2382378C1 |
| СПОСОБ ОДНОПУНКТОВОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ГРОЗ | 2001 |
|
RU2212685C2 |
| СПОСОБ ОДНОПУНКТОВОГО МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА АТМОСФЕРИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090903C1 |
| СПОСОБ ПАССИВНОГО РАДИОМОНИТОРИНГА ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2440588C1 |
| АППАРАТ ДЛЯ ВЫКЛАДКИ ОТПЕЧАТАННЫХ ЛИСТОВ В ПЛОСКИХ СКОРОПЕЧАТНЫХ МАШИНАХ | 1929 |
|
SU19230A1 |
| US 5477230 A1, 19.12.1995 | |||
| US 4672305 A, 09.06.1987 | |||
| US 4023408 A, 17.05.1977. | |||

