Изобретение относится к области радиотехники, а именно к пассивным системам радиомониторинга, и, в частности, может быть использовано в системах местоопределения источников радиоизлучения.
Известен способ определения координат источника радиоизлучения (ИРИ) (см, например, [1]), основанный на измерении корреляционным методом параметров сигнала ИРИ относительно одного из пространственно разнесенных пунктов радиоконтроля, при этом один из пунктов радиоконтроля является опорным и осуществляет прием и обработку сигналов, дополнительном запуске в предполагаемый район местонахождения ИРИ минимум трех носителей кассет, включении в состав каждой кассеты самораскрывающийся дистанционно-управляемый беспилотный летательный аппарат (БЛА) и установке на его борту функционирующих в системе привязки к единому времени радиоэлектронных средств поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных, их автоматическом приведении после отделения кассет от носителей в районе размещения ИРИ в работоспособное состояние, определении координат местоположения средств радионавигационного определении координат и передаче их значений соответствующими средствами приемопередачи данных на опорный пункт радиоконтроля, изменении при необходимости местоположения самораскрывающегося дистанционно-управляемого БЛА путем передачи соответствующих сигналов управления с опорного пункта, одновременном осуществлении по сигналу опорного пункта радиоконтроля частотный поиска сигналов ИРИ каждым средством поиска, обнаружения и определения параметров сигналов ИРИ, измерении при обнаружении сигнала ИРИ каждым средством поиска, обнаружения и определения параметров сигналов ИРИ его параметров и определении координат местоположения каждого средства радионавигационного определения координат, передаче их значений соответствующими средствами приемопередачи данных на опорный пункт радиоконтроля, определении на опорном пункте радиоконтроля по поступившим данным координат местоположения ИРИ относительно координат средств радионавигационного определения координат, измеренных в момент времени обнаружения сигнала ИРИ.
Недостатком способа является необходимость доставки в район размещения ИРИ минимум трех БЛА, с установленными на его борту функционирующих в системе привязки к единому времени радиоэлектронных средств поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат и приемопередачи данных, что приводит к дополнительным материальным и временным затратам и усложнению процесса получения координат ИРИ, а также снижает надежность функционирования всей системы в целом. В дополнение, привязка к единому времени функционирования и оценка совокупности параметров (частоты и времени приема сигнала) принимаемых сигналов для определения координат ИРИ, также снижает надежность и усложняет техническую реализацию способа.
Наиболее близким к техническому результату является способ определения координат ИРИ (см, например, [2]), основанный на доставке в предполагаемый район местонахождения ИРИ беспилотного летательного аппарата (БЛА), с установленными на его борту радиоэлектронными средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат, обработки и приемопередачи данных, осуществлении полета БЛА по круговой траектории относительно поверхности земли, определении на борту БЛА координат его местоположения, измерении по значениям которых на борту БЛА пространственных параметров траектории его полета, осуществлении на борту БЛА частотного поиска сигналов ИРИ, измерении при обнаружении на борту БЛА сигнала ИРИ его частоты, фиксировании на борту БЛА при максимальных и минимальных значениях частоты сигнала ИРИ координат его местоположения, определении на борту БЛА координат местоположения ИРИ, как координат точки пересечение касательных к траектории полета БЛА, проведенных из точек с координатами местоположения БЛА в моменты времени достижения частоты сигнала ИРИ максимального и минимального значений.
Недостатками способа являются:
необходимость привязки траектории полета БЛА радиоконтроля близкой к круговой, что в условиях сильных турбулентных потоков не всегда возможно;
время измерения местоположения ИРИ будет в основном определяться достижением максимального и минимального значений частоты сигнала ИРИ, что в случае малой скорости полета БЛА и большого радиуса траектории может быть достаточно большим и не удовлетворять заданным требованием оперативности мониторинга ИРИ.
использование касательных к траектории полета БЛА позволяет определить координаты ИРИ только на плоскости, что подразумевает полет БЛА на минимальной высоте от поверхности земли.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности определение координат ИРИ БЛА радиоконтроля.
Технический результат достигается тем, что в известном способе определения пространственных координат ИРИ, основанном на доставке в предполагаемый район местонахождения ИРИ БЛА, с установленными на его борту радиоэлектронными средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат, обработки и приемопередачи данных, осуществлении полета БЛА по заданной траектории относительно поверхности земли, определении на борту БЛА координат его местоположения, осуществлении на борту БЛА частотного поиска сигналов ИРИ, измерении при обнаружении на борту БЛА сигнала ИРИ его частоты, фиксируют N≥3 координат местоположения БЛА, соответствующих N≥3 значениям частоты сигнала ИРИ, вычисляют на борту БЛА по значениям N≥3 координат местоположения БЛА, значениям соответствующих N≥3 частот сигнала ИРИ и значениям пространственных параметров заданной траектории полета БЛА пространственные координаты местоположения ИРИ.
Сущность изобретения заключается в использовании одного доставляемого БЛА радиоконтроля в район размещения ИРИ и определении на его борту координат местоположения ИРИ по значениям N≥3 координат местоположения БЛА, соответствующих N≥3 значений частоты сигнала ИРИ и пространственных параметров любой заданной траектории полета БЛА.
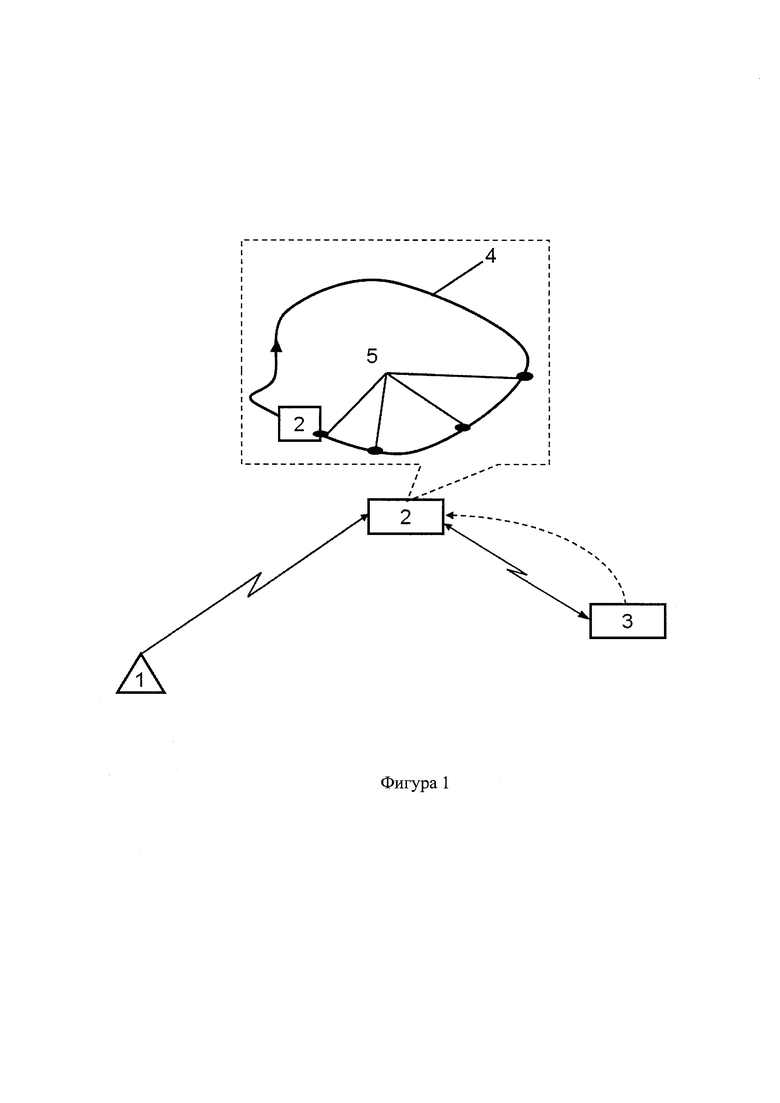
Заявленный способ поясняется иллюстрациями, представленной на фигуре 1. На фигуре 1 приняты следующие обозначения: 1 - ИРИ, местоположение которого необходимо определить; 2 - БЛА с установленными на борту радиоэлектронными средствами поиска, обнаружения и оценки параметров сигналов ИРИ, радионавигационного определения местонахождения и приемопередачи данных (БЛА радиоконтроля); 3 - пункт доставки БЛА; 4 - траектория полета БЛА; 5 - координаты местоположения БЛА, в которых измерены частоты сигнала ИРИ. Пункт доставки БЛА 3 доставляет БЛА 2 с установленной на борту радиоэлектронной аппаратурой в район пространственного мониторинга ИРИ 1. БЛА 2 в районе пространственного мониторинга ИРИ 1 осуществляет полет по любой заданной траектории 4. При этом траектория полета 4 может быть задана заранее и дистанционно с пункта доставки БЛА 3, а ее пространственные параметры предаются на БЛА 2. Средство радионавигационного определения местонахождения определяет координаты БЛА 2. Бортовое средство поиска, обнаружения и оценки параметров сигналов БЛА 2 осуществляет поиск сигналов ИРИ 1 в заданном частотном диапазоне и при обнаружении сигнала ИРИ 1 осуществляет измерение его частоты. Фиксируют на борту БЛА 2 N≥3 координат местоположения, соответствующих N≥3 значениям частоты сигнала ИРИ 1. Вычисляют пространственные координаты местоположения ИРИ 1 по значениям N≥3 координат местоположения БЛА 2, значениям N≥3 соответствующих частот сигнала ИРИ 1 и значениям пространственных параметров заданной траектории полета БЛА 2.
Справедливость утверждения основных положений способа подтверждается проведенным математическим моделированием.
Как известно [3], изменение частот спектральных составляющих сигнала, принимаемого в перемещающемся относительно источника излучения радиоприемном устройстве, будет зависеть от скорости их взаимного перемещения, определяемой в соответствии со следующим выражением

где  - радиус вектор, определяющий направление на источник излучения;
- радиус вектор, определяющий направление на источник излучения;
 - расстояние между источником излучения и радиоприемным устройством.
- расстояние между источником излучения и радиоприемным устройством.
В декартовой системе координат с базисом  величину взаимного удаления ИРИ и приемника БЛА определим в соответствии с выражением вида
величину взаимного удаления ИРИ и приемника БЛА определим в соответствии с выражением вида

где (xu, yu, zu) - координаты ИРИ; (x(t),y(t),z(t)) - координаты радиоприемного устройства.
Учитывая соотношение (2), опираясь на результаты, представленные в [4], для радиальной скорости получим

Зная радиальную скорость перемещения приемника БЛА относительно ИРИ V можно показать, что значение частоты спектрального смещения ƒд составляющей сигнала ИРИ ƒ0 определяется следующим соотношением [4]

где  - скорость света в вакууме.
- скорость света в вакууме.
Таким образом, рассматривая спектральное смещение для монохроматического сигнала ИРИ частотой ƒ0, запишем систему уравнений по моментам времени измерения траекторных параметров движения приемника БЛА и частоты Доплера, при условии, что траектория движения носителя не проходит через местоположения источника излучения 
где N - общее количество моментов времени измерения на траектории движения носителя; j - номер выборки значений частоты Доплера и параметров траектории движения носителя; k - определяет начальный номер выборочных значений (номер выборки при формировании системы нелинейных уравнений).
Следует подчеркнуть, что размерность множества {j} для текущей k-ой итерации вычислений, как видно из выражения (5), составляет 3, то есть система включает 3 уравнения, неизвестными в которых являются координаты ИРИ (xu, yu, zu).
Для решения системы (5) целесообразно использовать численные методы, в частности, метод касательных [5], который применительно к системе (5) имеет достаточно высокую вероятность сходимости.
Аналитическая структура каждой из функций системы нелинейных уравнений ƒj(xu, yu, zu) исходя из выражения (5) одинакова, отличие состоит лишь в параметрах, которые определяются для моментов времени tj.
Таким образом, опираясь на метод касательных система (5) сводится к системе линейных уравнений относительно переменных  ,
,  ,
,  следующего вида.
следующего вида.
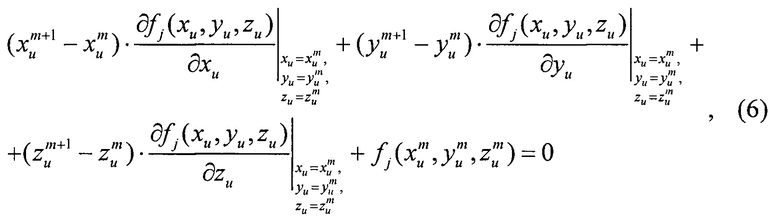
где m - номер итерационного шага решения системы, j - как и определено выше номера трех последовательных выборок;  ,
,  ,
,  - решение системы уравнений на m-ом (предыдущем) шаге, m=1 определяет начальное условие по значениям координат при решении системы, ориентированное на априорные данные о месторасположении источника излучения.
- решение системы уравнений на m-ом (предыдущем) шаге, m=1 определяет начальное условие по значениям координат при решении системы, ориентированное на априорные данные о месторасположении источника излучения.
Опираясь на уравнения системы (5) значения частных производных функции вида
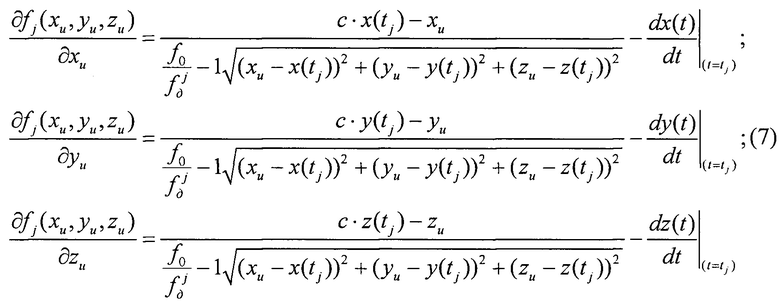
позволяют определить координаты местоположения ИРИ (xu, yu, zu).
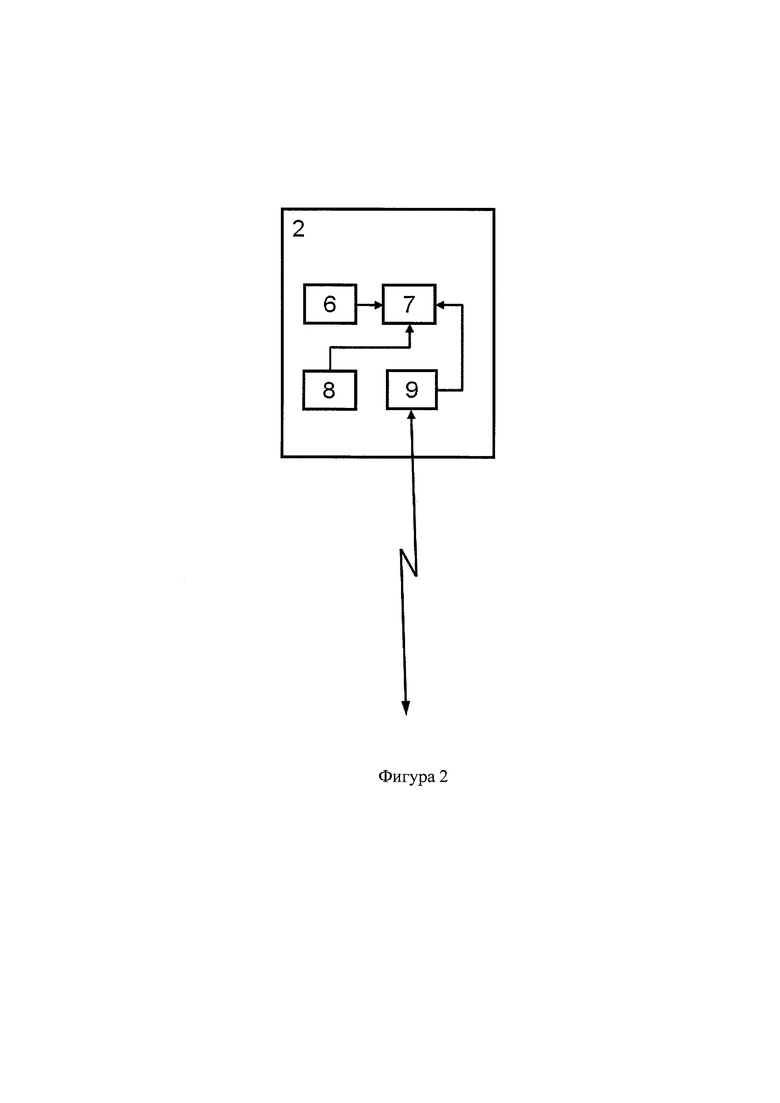
На фигуре 2 представлена блок-схема устройства, с помощью которого может быть реализован предлагаемый способ. Блок-схема устройства включает БЛА 2 с установленными на борту блоком поиска, обнаружения и измерения частоты сигналов ИРИ 6, блоками обработки 7 и приемопередачи данных 9, блоком радионавигационного определения координат 8.
Устройство работает следующим образом. БЛА 2, осуществляет полет по заданной или управляемой через блок приемопередачи данных 9 траектории. Блок радионавигационного определения координат 8 определяет координаты местоположения БЛА 2 и передает их значения в блок обработки данных 7. Блок поиска, обнаружения и измерения частоты сигналов ИРИ 6 осуществляет поиск сигналов ИРИ в заданном частотном диапазоне и при обнаружении сигнала ИРИ осуществляет измерение его частоты и предает их значения в блок обработки данных 7. Блок обработки данных 7 по поступившим данным осуществляет необходимые вычисления и определяет координаты местоположения ИРИ.
Таким образом, у заявляемого способа появляются свойства, заключающиеся в повышении эффективности определение координат ИРИ за счет использования одного БЛА радиоконтроля и определении его борту координат местоположения ИРИ по значениям N≥3 координат местоположения БЛА, значениям соответствующих N≥3 частот сигнала ИРИ и пространственных параметров любой заданной траектории полета БЛА.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ определения пространственных координат ИРИ, основанный на доставке в предполагаемый район местонахождения ИРИ БЛА, с установленными на его борту радиоэлектронными средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат, обработки и приемопередачи данных, осуществлении полета БЛА по заданной траектории относительно поверхности земли, определении на борту БЛА координат его местоположения, осуществлении на борту БЛА частотного поиска сигналов ИРИ, измерении при обнаружении на борту БЛА сигнала ИРИ его частоты, фиксации N≥3 координат местоположения БЛА, соответствующих N≥3 значениям частоты сигнала ИРИ, вычислении на борту БЛА по значениям N≥3 координат местоположения БЛА, по значениям соответствующих N≥3 частот сигнала ИРИ и по значениям пространственных параметров заданной траектории полета БЛА пространственных координат местоположения ИРИ.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые средства доставки малогабаритных БЛА, с установленными на его борту типовыми радиотехническими узлами и устройствами радиоконтроля и обработки данных.
Источники информации
1 Пат. 2604004 RU, МПК G01S 5/12. Способ определения координат источника радиоизлучения / Козирацкий Ю.Л., Паринов М.Л., Прохоров Д.В., Кулешов П.Е. и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж). - №2014154185; за-явл. 29.12.2014; опубл. 10.12.2016, Бюл. №34.
2 Пат. 2693936 RU, МПК G01S 5/12. Способ определения координат источника радиоизлучения / Козирацкий Ю.Л., Паринов М.Л., Нагалин ДА. и др.; заявитель и патентообладатель ВУНЦ ВВС «ВВА им. проф. Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж). - №2018106433; заявл. 20.02.2018; опубл. 08.07.2019, Бюл. №39.
3 Ширман Я.Д. Теоретические основы радиолокации. М.: «Советское радио», 1970. 560 с.
4 Глонасс. Принципы построения и функционирования / под ред. Петрова А.И., Харисова В.Н. М.: Радиотехника, 2005. 688 с.
5 Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗОВ. М.: «Наука», 1980. 976 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2693936C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2758349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2604004C2 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2759116C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2582592C1 |
| СПОСОБ РАДИОПРОТИВОДЕЙСТВИЯ ЗЕНИТНО-РАКЕТНЫМ КОМПЛЕКСАМ | 2020 |
|
RU2755567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| Способ координатного мониторинга источника радиоизлучения | 2016 |
|
RU2700270C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
Изобретение относится к области радиотехники, а именно к пассивным системам радиомониторинга, и, в частности, может быть использовано в системах местоопределения источников радиоизлучения (ИРИ). Техническим результатом является повышение эффективности определения координат ИРИ беспилотным летательным аппаратом (БЛА) радиоконтроля. При осуществлении заявленного способа в предполагаемый район местонахождения ИРИ доставляют беспилотный летательный аппарат (БЛА) с установленными на его борту радиоэлектронными средствами поиска, обнаружения и определения параметров сигналов ИРИ, радионавигационного определения координат, обработки и приемопередачи данных. Осуществляют полет БЛА по заданной траектории относительно поверхности земли. Определяют на борту БЛА координаты его местоположения. Осуществляют на борту БЛА частотный поиск сигналов ИРИ и измерение при обнаружении на борту БЛА сигнала ИРИ его частоты. Фиксируют N≥3 координат местоположения БЛА, соответствующих N≥3 значениям частоты сигнала ИРИ. Вычисляют на борту БЛА по значениям N≥3 координат местоположения БЛА, значениям соответствующих N≥3 частот сигнала ИРИ и значениям пространственных параметров заданной траектории полета БЛА пространственные координаты местоположения ИРИ. 2 ил.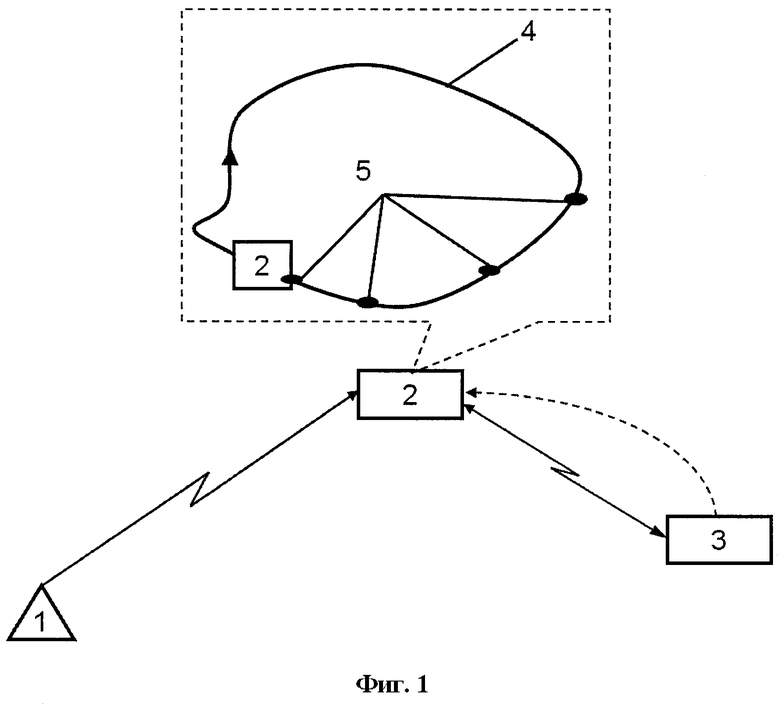
Способ определения пространственных координат источника радиоизлучения, основанный на доставке в предполагаемый район местонахождения источника радиоизлучения беспилотного летательного аппарата, с установленными на его борту радиоэлектронными средствами поиска, обнаружения и определения параметров сигналов источников радиоизлучения, радионавигационного определения координат, обработки и приемопередачи данных, осуществлении полета беспилотного летательного аппарата по заданной траектории относительно поверхности земли, определении на борту беспилотного летательного аппарата координат его местоположения, осуществлении на борту беспилотного летательного аппарата частотного поиска сигналов источника радиоизлучения, измерении при обнаружении на борту беспилотного летательного аппарата сигнала источника радиоизлучения его частоты, отличающийся тем, что фиксируют N≥3 координат местоположения беспилотного летательного аппарата, соответствующих N≥3 значениям частоты сигнала источника радиоизлучения, вычисляют на борту беспилотного летательного аппарата по значениям N≥3 координат местоположения беспилотного летательного аппарата, значениям соответствующих N≥3 частот сигнала источника радиоизлучения и значениям пространственных параметров заданной траектории полета беспилотного летательного аппарата пространственные координаты местоположения источника радиоизлучения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2693936C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| ОВЧАРЕНКО К.Л., ТЮСТИН М.М | |||
| Определение местоположения ИРИ с применением однопозиционного подвижного измерителя на основе разностно-дальномерного метода пеленгования // Журнал Радиоэлектроники | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2604004C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |

