Изобретение относится к области машиностроения, экзоскелетонов и медицинской техники.
Известны пружины кручения (ГОСТ 18751-80. Пружины кручения к упорам. Конструкция и размеры), которые предназначены для создания упругого восстанавливающего момента, линейно возрастающего с увеличением угла закручивания пружины.
Недостатком этих пружин является невозможность получения заданной силовой характеристики.
Прототипом является упругая система, позволяющая получать заданную силовую характеристику с постоянной «линейной» восстанавливающей силой (Зотов А.Н. Systems with quasi-zero-stiffness characteristic / А.Н. Зотов // Proceedings. IPACS Open Access Electronic Library, OPEN LIBRARY, 6th EUROMECH Nonlinear Dynamics Conference, ENOC 2008). Упругая система, имеющая заданную силовую характеристику с постоянной восстанавливающей силой, включает в себя упругий элемент, который может двигаться между двумя направляющими расчетной формы. Изменяя форму направляющих, можно получить различные силовые характеристики, в том числе и силовую характеристику с постоянной восстанавливающей силой (квазинулевой жесткостью). Недостатком данной системы являются ее относительно большая металлоемкость, а также то, что она работоспособна только в прямолинейном направлении, работа во вращательном режиме невозможна.
Технической задачей заявляемого изобретения является создание упругого шарнира, создающего заданный восстанавливающий момент сил
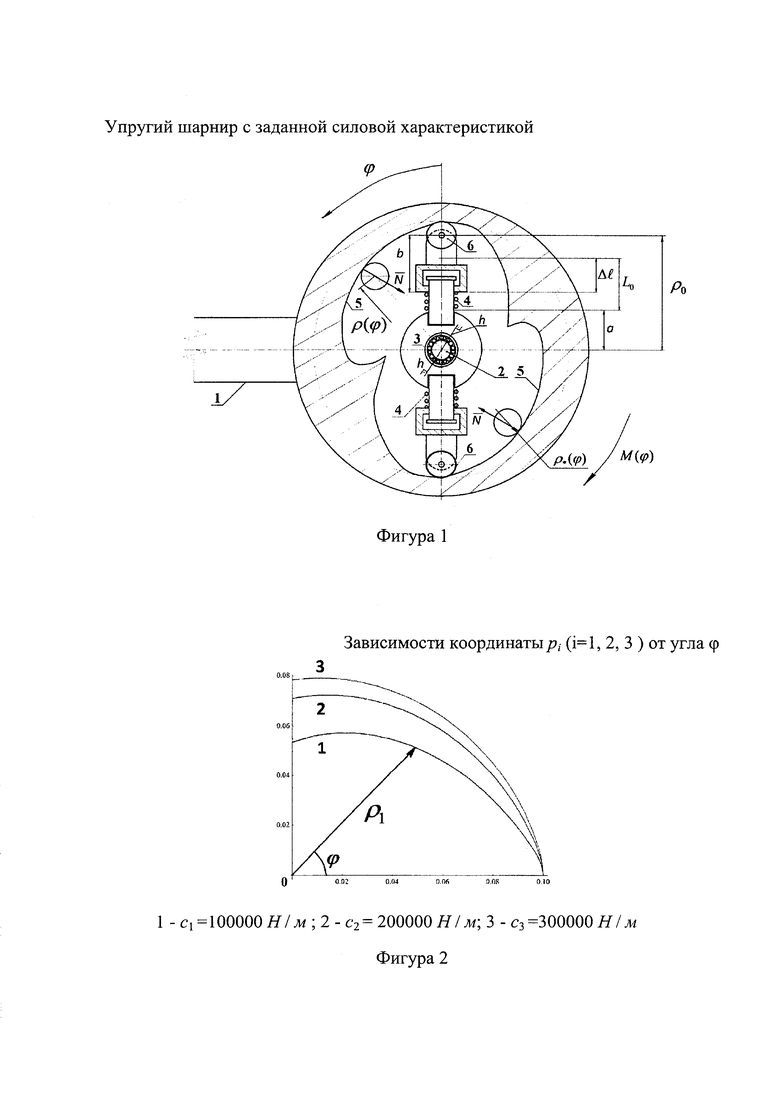
Поставленная задача решается тем, что упругий шарнир с заданной характеристикой восстанавливающего усилия содержит корпус с направляющей поверхностью и упругими элементами, при этом корпус выполнен с внутренней полостью заданной расчетной формы, на поверхности которой выполнены центрально симметричные направляющие кулачковые поверхности, и снабжен валом, расположенным внутри полости корпуса с возможностью поворота вокруг центральной оси полости корпуса, и, по меньшей мере, с двумя радиально расположенными упругими элементами, симметрично установленными относительно оси вращения вала и расположенными с возможностью взаимодействия с кулачковой поверхностью корпуса.
Упругий элемент представляет собой кинематически связанные стержни 1 и 2, соединенные через упругую связь, например, в виде пружины. В центре одного шарнира расположен подшипник 3, внутреннее кольцо которого связано с подвижным валом. Наружное кольцо подшипника связано с центрально-симметрично расположенными упругими элементами 4, которые контактируют с центрально-симметричными направляющими кулачковыми поверхностями 5, с которыми взаимодействуют через ролики 6 стержни 2. Направляющие кулачковые поверхности 5 жестко связаны со стержнем 1. Реакции N, возникающие при контакте упругих элементов 4 с направляющими 5, не проходят через центр шарнира и создают восстанавливающий момент MΣ(φ)=2·N·h (от двух реакций; система симметрична, трение не учитывается). При повороте одной части шарнира по отношению к другой на угол φ (от вертикали, фиг. 1) момент сопротивления системы для одной пружины определяется по следующей формуле

где 
Формулу (1) можно переписать:

Теперь, задавая функцию M(φ) и решая дифференциальное уравнение (2), можно получить зависимость ρ(φ). Покажем пример расчета формы направляющих заданной формы 5 для следующих исходных данных: a=0,03 м; L0=0,05 м; b=0,04 м; ρ0=0,1 м (при φ=0); M(φ)=-200·th[10(φ+0,0345)]+200/3.
Решив дифференциальное уравнение (2), получим зависимость ρ(φ):

где B=2((200/3)φ-20ln[ch[10(φ+0,0345)]]-C0)/с.
Решая уравнение (3), получим:

Начальным условиям соответствует знак минус, следовательно, уравнение (4) принимает вид:

На фигуре 2 представлены зависимости ρ(φ) при различных значениях коэффициента жесткости c, полученные по формуле (5) (угол φ изменяется от 0 до 90 градусов).
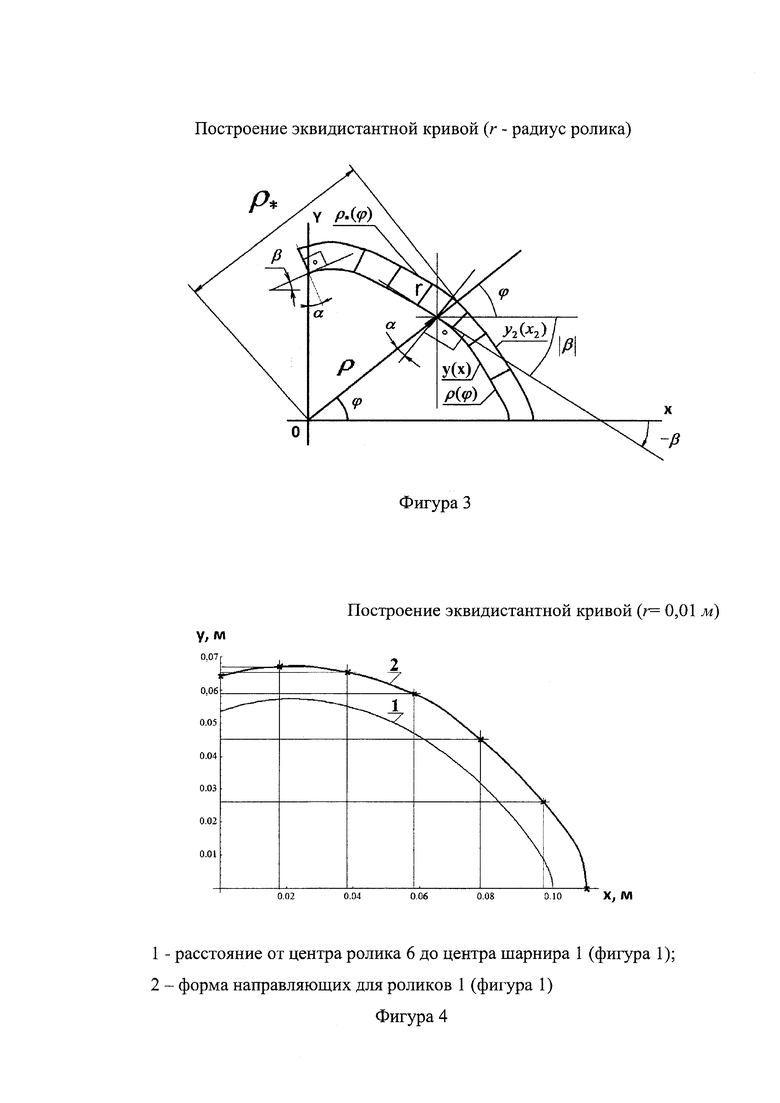
Для получения формы поверхности, с которой контактируют ролики 6 (фигура 1), необходимо построить эквидистантную кривую ρ*(φ) по отношению к полученной (ρ(φ), фигура 3). Как видно из фигуры,

где ρ(φ) - зависимость, полученная по формуле (5); α=β-φ+π/2 - угол между ρ и нормалью в данной точке; r - радиус ролика 6 (фигура 1); β - угол наклона касательной (для кривой ρ(φ)) к оси x (tgβ=y'(x), фигура 3).
Для определения угла β выразим уравнение (6) в декартовых координатах, пользуясь уравнениями перевода [Выгодский М.Я. Справочник по высшей математике / М.Я. Выгодский. - М.: ACT: Астрель, 2006. - С. 991]:

С учетом выражений (7) уравнение (5) запишется в следующей форме (с учетом В (3), коэффициент жесткости пружины принят: c=100000 Н/м):

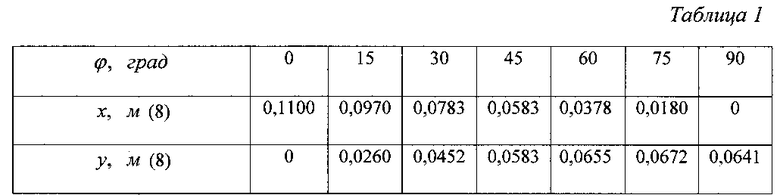
Данное уравнение решалось численно: при задании x (для заданного значения угла φ, по формуле (7)) определялась координата y (таблица 1).
На фигуре 4 показаны две кривые: кривая 1, построенная по формуле (5), и эквидистантная кривая 2, построенная по данным таблицы 1, полученной по уравнению (8).
Упругий шарнир с заданной силовой характеристикой может быть использован в экзоскелетах, системах защиты от ударов и вибрации, в различных специальных приводах и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗАТОР С КВАЗИНУЛЕВОЙ ЖЕСТКОСТЬЮ | 2014 |
|
RU2557865C1 |
| ЗВУКОИЗОЛЯЦИОННАЯ ПАНЕЛЬ | 2011 |
|
RU2464391C1 |
| ВИБРОИЗОЛЯЦИОННАЯ ПОДВЕСКА РОТОРА МАШИН И ОБОРУДОВАНИЯ | 2010 |
|
RU2440518C1 |
| ВИБРОЗАЩИТНАЯ РУКОЯТКА ОТБОЙНОГО МОЛОТКА | 2013 |
|
RU2578299C2 |
| ВИБРОИЗОЛЯТОР С КВАЗИНУЛЕВОЙ ЖЕСТКОСТЬЮ | 2011 |
|
RU2463497C1 |
| ВИБРООПОРА | 2010 |
|
RU2426920C1 |
| ВЕДУЩЕЕ УСТРОЙСТВО С ПРУЖИНАМИ КРУЧЕНИЯ | 2006 |
|
RU2333455C2 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2011 |
|
RU2491206C2 |
| АМОРТИЗАТОР НИЗКОРЕЗОНАНСНЫЙ | 2017 |
|
RU2660190C1 |
Изобретение относится к области машиностроения, экзоскелетонов и медицинской техники. Оно может быть использовано в системах защиты от крутильных колебаний в различных механизмах. Упругий шарнир с заданной силовой характеристикой включает в себя наружный корпус с направляющими (5) заданной формы и подвижный относительно него вал, связанный с корпусом посредством упругих элементов (4), которые контактируют с направляющими (5), причем форма направляющих такова, что реакции, возникающие при контакте упругих элементов (4) с направляющими (5), создают заданный восстанавливающий момент. Технический результат: создание упругого шарнира, создающего заданный восстанавливающий момент сил. 4 ил., 1 табл.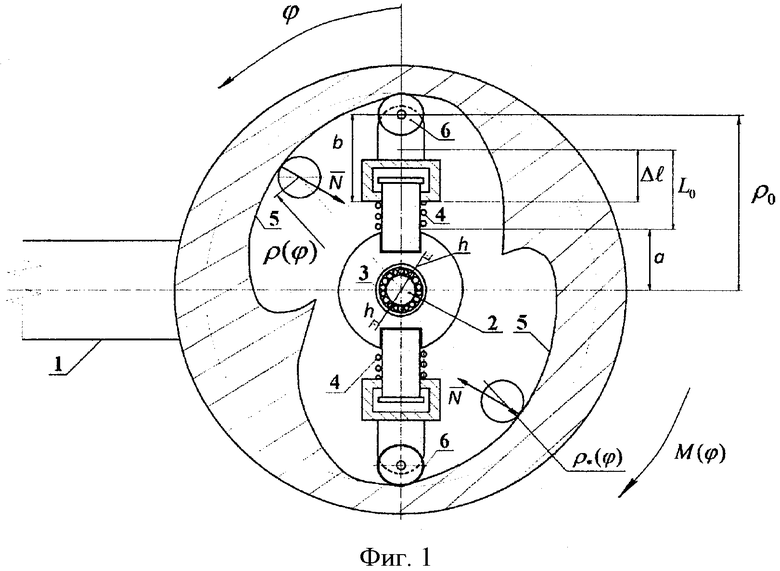
Упругий шарнир с заданной характеристикой восстанавливающего усилия, содержащий корпус с направляющей поверхностью и упругими элементами, отличающийся тем, что корпус выполнен с внутренней полостью заданной расчетной формы, на поверхности которой выполнены центрально-симметричные направляющие кулачковые поверхности, и снабжен валом, расположенным внутри полости корпуса с возможностью поворота вокруг центральной оси полости корпуса, и, по меньшей мере, с двумя радиально расположенными упругими элементами, симметрично установленными относительно оси вращения вала и расположенными с возможностью взаимодействия с кулачковой поверхностью корпуса.
| Упругое шарнирное соединение | 1985 |
|
SU1280220A1 |
| УПРУГИЙ ШАРНИР | 0 |
|
SU255707A1 |
| Приемная труба для вертикальных ветряных двигателей | 1935 |
|
SU47622A1 |
| US 4966043 A, 30.10.1990. | |||

