Изобретение относится к строительству и может быть использовано в трамбовочных машинах и устройствах для уплотнения грунта.
Наиболее близким к предлагаемому устройству является устройство для погружения свай (Авт. св. СССР №1245656, М. кл. E02D 7/18. Опубл. 23.07.86. Бюл. №27).
Устройство содержит электродвигатель, на концах валов которого закреплены два ведущих кривошипа, шарнирно соединенные двумя шатунами с двумя ведомыми кривошипами с дебалансами на коренных шейках, при этом ось вращения вала электродвигателя перпендикулярна осям вращения ведомых кривошипов и расположены на расстоянии, равном длине шатуна. Оси шарниров кривошипов правой стороны расположены под углом α, а оси шарниров кривошипов левой стороны, под углом (180-α), при этом ведомые кривошипы закреплены в корпусе диаметрально противоположно.
Устройство снабжено двумя дополнительными ведомыми кривошипами с дебалансами, шарнирно смонтированными с основными ведомыми кривошипами и соединенными с ними через шатунные шейки, а их коренные шейки расположены в корпусе соосно.
Недостаток данного устройства заключается в сложности передаточного механизма, состоящего из двух ведущих кривошипов, двух шатунов и четырех ведомых кривошипов с дебалансами. Существенным основным недостатком является малое значение коэффициента неравномерности вращения ведомых кривошипов с дебалансами, следовательно, недостаточно сильным инерционным воздействием, чем и вызвано использование четырех кривошипов с дебалансами.
Устройство имеет одно положение осей вращения ведущих и ведомых кривошипов - перпендикулярное, что существенно ограничивает функциональный диапазон работы устройства и возможность регулирования инерционного воздействия на объект.
Силовые импульсы передаются только в вертикальном направлении, нет возможности использовать их под углом, что также снижает функциональность работы.
Цель изобретения - упрощение конструкции устройства и повышение эффективности работы при уплотнении грунта.
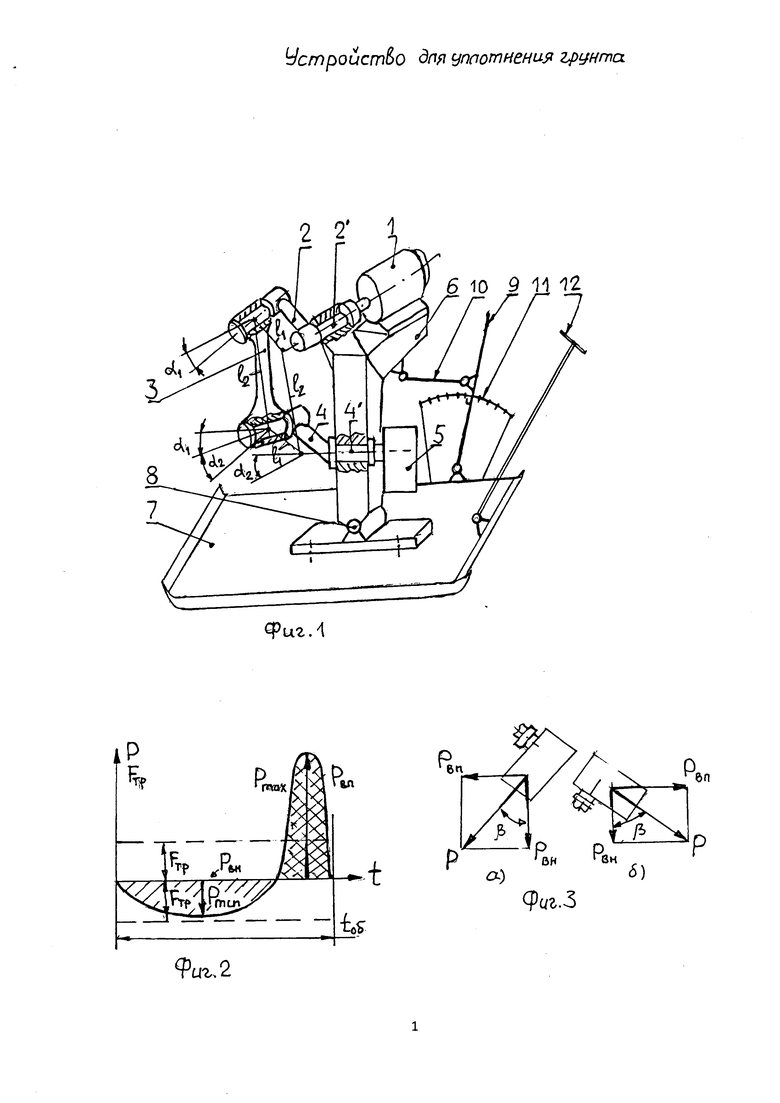
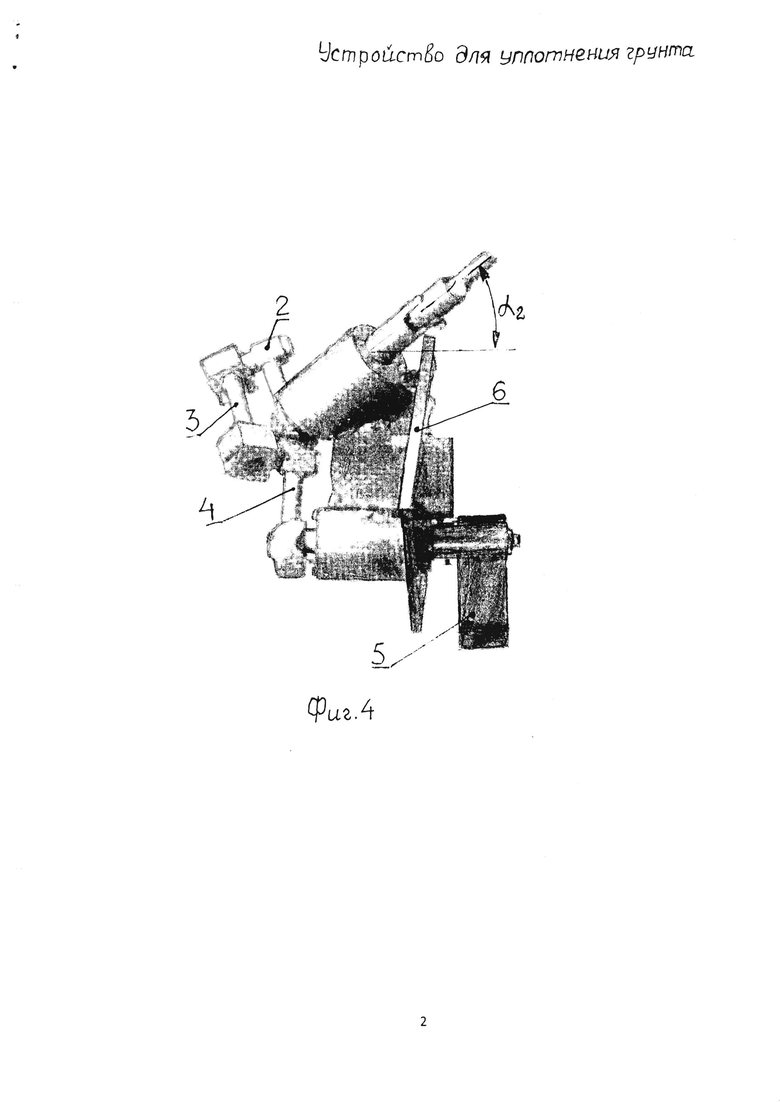
На фиг. 1 изображен общий вид устройства; на фиг. 2 - график изменения инерционных усилий; на фиг. 3 - схема сил воздействия при наклоне корпуса с дебалансами; на фиг. 4 - фото опытного образца корпуса 6 с передаточными звеньями 2, 3, 4 и дебалансом 5.
Отличительными признаками предложенного устройства по сравнению с прототипом являются:
- существенное упрощение конструкции за счет сокращения количества подвижных звеньев - в предложенном их 3, а у прототипа 10;
- геометрические оси шарниров корпуса и шатуна скрещены под углом α2, принимающие значения от 30 до 90°, в прототипе только под углом 90°;
- в разы больше коэффициент δ неравномерности вращения дебалансов: при α2=30° диапазон от 2,59 до 27,71: при α2=45° диапазон от 1,42 до 4,44; у прототипа диапазон от 0,59 до 1,15 (см. таблицу 1), следовательно, эффект воздействия у прототипа значительно и существенно меньше;
- корпус связан шарнирно с плитой с возможностью поворота на угол β вперед или назад, что дает самопередвижение устройства без усилий оператора, в прототипе корпус со сваей связан жестко;
- силовые импульсы передаются как вертикально, так и наклонно по отношению к плите, у прототипа только вертикально;
- значения углов скрещивания α1 и α2, l1 и l2 и их соотношение  , в прототипе l=l1sinα;
, в прототипе l=l1sinα;
Указанная цель достигается тем, что на валу электродвигателя 1 (фиг. 1) закреплен один кривошип 2, шарнирно связанный шатуном 3 с ведомым кривошипом 4, с которым жестко связан дебаланс 5.
Электродвигатель 1, вал 2' вращения ведущего кривошипа 2 и вал 4' ведомого кривошипа 4 расположены в корпусе 6 под углом скрещивания α2.
Особенность кривошипов, шатуна и корпуса - в особом расположении геометрических осей их шарниров, совокупность которых существенно влияет на величину и регулировку в большом диапазоне силы инерции.
Так, оси шарниров кривошипов 2 и 4 скрещены (скрещены - значит нигде не пересекаются и не параллельны между собой) под углом α1 и отстоят на кратчайшем расстоянии l1, а оси шарниров шатуна 3 и геометрические оси валов 2' и 4' кривошипов 2 и 4 скрещены под углом α2 и расположены на кратчайшем расстоянии l2. При этом параметры связаны соотношением

Угол α1 может принимать значения от 10 до 50°, а угол α2 - от 30 до 90°. Следует отметить, что кратчайшие расстояния у шарниров кривошипов и корпуса измеряются не по материальному телу, а расположены вне тела.
Корпус 6 связан шарнирно с плитой 7 посредством пальца 8. Корпус 6 вместе с расположенным на нем кривошипом с дебалансом 5 может изменять угол наклона по отношению к плите 7 как вперед, так и назад. Изменение угла осуществляется посредством рычага 9 и тяги 10. Рычаг 9 шарнирно связан с плитой 7 и шарнирно с корпусом 6 тягой 10. Рычаг 9 фиксирует одно из положений корпуса 6 на зубчатом секторе 11 посредством защелки (на схеме не показана).
Для ручного перемещения устройства оно снабжено тягой 12, шарнирно связанной с плитой 7.
Устройство работает следующим образом.
От электродвигателя 1 вращение передается ведущему кривошипу 2, который через шатун 3 вращает ведомый кривошип 4 с дебалансом 5. За счет особого расположения осей шарниров кривошипов 2 и 4, шатуна 3 и осей корпуса 6, ведомый кривошип 4 вместе с дебалансом 5 будут иметь переменную на одном обороте угловую скорость, коэффициент неравномерности вращения которой определяется выражением

Максимальное ωmax и минимальное ωmin значение угловой скорости ведомого кривошипа с дебалансом определяются выражениями

где ω - угловая скорость ведущего кривошипа 2.
При изменении угловой скорости появляется ускорение вращающегося дебаланса 5, равное

где r - расстояние от оси вращения дебаланса до центра его массы;
ω - угловая скорость вращения дебаланса;
γ - угловое ускорение вращения дебаланса.
В результате появляется сила инерции Р, равная Р=m·a (здесь m - масса дебаланса).
В моменты, когда угловая скорость ω вращения дебаланса принимает максимальное и минимальное значения, угловое ускорение равно нулю и максимальное и минимальное значение силы инерции соответственно равны

Пример конструктивного воплощения устройства, при принятой массе дебаланса m=10 кг, r=0,1 м, ω=10 с-1, α1=20°, минимальный и максимальный импульсы будут равны:

При α1=60° и тех же данных m=10 кг, r=0,1 м, ω=10 с-1 импульсы равны

Как видно из примера, с увеличением угла α1 значительно увеличивается величина силы инерции, при этом максимальное значение силы при угле α1=20° будет в 4,2 раза больше минимального, а при угле α1=60° максимальное значение в 192 раза больше минимального значения силы.
На фиг. 2 обозначено: Pmax, Pmin, Fтр - сила трения плиты о поверхность грунта. Площадь, ограниченная кривой P=f(t) и находящаяся над осью абсцисс (ось времени одного оборота), представляет собой импульс силы в направлении вниз перпендикулярно плоскости плиты, при этом корпус 6 устройства расположен вертикально, т.е. перпендикулярно плоскости плиты.
Площадь кривой P=f(t), находящаяся под осью абсцисс этого графика, представляет собой импульс силы Р в противоположном направлении.
В соответствии с законом сохранения количества движения величины этих импульсов равны, т.е. равны площади над осью и площадью под осью абсцисс. Однако вследствие неравномерности вращения дебаланса амплитуда силы Р вниз существенно превышает амплитуду силы Р в противоположном направлении, чем создается эффективность уплотнения. Это уплотнение будет осуществляться на одном месте под плитой.
Для перемещения устройства вперед необходимо рычаг 9 переместить назад, в результате тяга 10 повернет корпус 6 вместе с дебалансов на некоторый угол β и сила инерции будет направлена под углом β (фиг. 3а). Сила Р разложится на две силы: вниз - Рвн=Pcosβ и вперед - Рвп=Psinβ.
Сила Рвн будет уплотнять грунт, а сила Рвп будет перемещать устройство вперед без усилия оператора. Ход перемещения будет зависеть от угла β и соотношения сил Рвп и силы трения Fтр=mgf (f - коэффициент трения).
На графике фиг. 2 показана сила трения, которая больше минимальной силы инерции Pmin=Рвн, движение устройства назад не происходит. Так как сила Рвп превосходит силу трения, устройство будет перемещаться вперед, одновременно уплотняя грунт.
Для движения назад необходимо рычаг 9 повернуть вперед, тяга 10 повернет корпус 6 вперед, составляющая Рвп силы инерции (фиг. 3б) будет направлена назад и, соответственно, движение устройства будет назад.
Таким образом, устройство одновременно выполняет уплотнение грунта и перемещение вперед или назад без силового участия оператора. Процесс уплотнения и перемещения устройства осуществляется от одного источника-электродвигателя.
На фиг. 4 показано фото опытного образца корпуса с подвижными звеньями 2, 3, 4 и 5, в устройстве угол α2 равен 45°.
Регулирование силового импульса в устройстве можно осуществлять еще на стадии проектирования, т.е. назначения углов скрещивания осей шарниров α1 и α2, от которых зависит коэффициент неравномерности вращения дебалансов. Варианты параметров кривошипов (α1, l1), определенные по выражению (2), шатуна и корпуса (α2, l2=200 мм) приведены в таблице 1(l2 принято равным 200 мм).
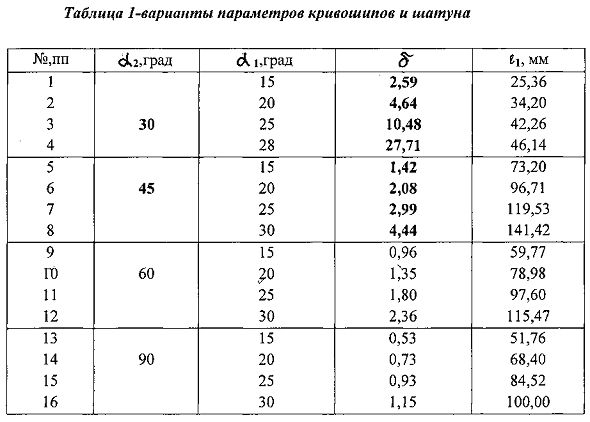
Из таблицы видно, что наибольшее значение коэффициент δ неравномерности вращения дебаланса принимает при угле скрещивания α2 осей вращения кривошипов (осей корпуса 6) и шатуна, равном 30 и 45°, угол α1 целесообразен от 20 до 30°.
Углы скрещивания α2=60° и особенно α2=90° нежелательны из-за незначительного коэффициента неравномерности вращения и малой эффективности воздействия инерционной силы.
Это убедительное подтверждение существенного недостатка у прототипа, у которого использованы четыре дебаланса вместо одного у предложенного устройства.
Регулировать степень уплотнения можно частотой вращения дебалансов, т.е. изменением частоты вращения вала электродвигателя. Дополнительно можно увеличить эффект уплотнения добавлением сменных дебалансов, а также увеличением веса плиты или ее нагружением дополнительным грузом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 2016 |
|
RU2633902C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| МЕШАЛКА ДЛЯ ВЯЗКИХ ЖИДКОСТЕЙ | 2016 |
|
RU2633586C1 |
| УСТРОЙСТВО ДЛЯ ГАЛТОВКИ ДЕТАЛЕЙ | 2015 |
|
RU2618301C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
| Устройство для расчесывания меховых шкурок | 1987 |
|
SU1472513A1 |
| Устройство для погружения свай | 1984 |
|
SU1245656A1 |
| Устройство для гальванопластической обработки деталей | 1984 |
|
SU1186706A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
| СМЕСИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫЙ | 2020 |
|
RU2758515C1 |
Изобретение относится к строительству для уплотнения грунта. Содержит корпус с плитой, электродвигатель, на валу которого жестко закреплен кривошип, соединенный шарнирно через шатун с ведомым кривошипом, на валу которого закреплен дебаланс. Звенья передачи имеют особое расположение осей шарниров: скрещенные под разными углами α1 и α2 и отстоящие на кратчайших расстояниях l1, l2, и связанные соотношением  . Устройство обеспечивает регулируемое в широких пределах инерционное усилие, которое эффективно одновременно уплотняет грунт и перемещает вперед или назад устройство без силового участия оператора. 1 з.п. ф-лы, 3 ил.
. Устройство обеспечивает регулируемое в широких пределах инерционное усилие, которое эффективно одновременно уплотняет грунт и перемещает вперед или назад устройство без силового участия оператора. 1 з.п. ф-лы, 3 ил.
1. Устройство для уплотнения грунта, содержащее электродвигатель, закрепленный на его валу кривошип и шарнирно соединенный с ним посредством шатуна ведомый кривошип с дебалансом, размещенные на корпусе с плитой, отличающееся тем, что, с целью упрощения конструкции и повышения эффективности работы устройства, геометрические оси шарниров кривошипов скрещены под одинаковым углом α1 и расположены на кратчайшем расстоянии l1, а геометрические оси шарниров шатуна и геометрические оси вращения кривошипов (оси корпуса) скрещены под углом α2 и отстоят на кратчайшем расстоянии l2, при этом параметры связаны соотношением
2. Устройство по п. 1, отличающееся тем, что корпус связан с плитой шарнирно с возможностью поворота и снабжен фиксирующим устройством, например, рычажным с защелкой.
| Устройство для погружения свай | 1984 |
|
SU1245656A1 |
| Вибротрамбовка | 1984 |
|
SU1192426A1 |
| ВИБРАТОР ДЛЯ ПОГРУЖЕНИЯ В ГРУНТ СВАЙ | 0 |
|
SU376128A1 |
| US 3802791 A, 09.04.1974. | |||

