Настоящее изобретение относится к лифтам и, в частности, к способу эксплуатации лифтов, включающему процедуру испытания тормозов лифта.
Обычный лифт с канатоведущим шкивом, как правило, содержит кабину, противовес и тяговое средство, такое как канат, трос или приводной ремень, соединяющее кабину с противовесом. Тяговое средство огибает тяговый шкив, ведомый двигателем, и входит в зацепление с ним. Двигатель и тяговый шкив вращаются одновременно, приводя в движение тяговое средство и, тем самым, соединенные между собой кабину и противовес, вдоль шахты лифта. Для остановки лифта и удержания лифта в неподвижном состоянии в шахте совместно с двигателем или тяговым шкивом применяется по меньшей мере один тормоз. Управление перемещением лифта осуществляются при помощи контроллера в ответ на запросы или вызова на ход лифта, поступающие от пассажиров.
Тормоза должны отвечать жестким требованиям. Например, как в Нормах и Правилах ASME А17.1-2000 в Соединенных Штатах, так и в Европейском стандарте EN 81-1:1998 указывается, что тормоз лифта должен обеспечивать возможность останова двигателя во время хода кабины лифта вниз с номинальной скоростью и с номинальной нагрузкой, превышающей номинальную нагрузку на 25%.
Кроме того, тормоз лифта обычно устанавливается в виде двух тормозных агрегатов, так что при любой неисправности одного из тормозных агрегатов другой тормозной агрегат все же развивает достаточную тормозную силу для торможения кабины лифты, движущейся с номинальной скоростью и при номинальной нагрузке.
Принимая во внимание крайнюю необходимость тормоза лифта, важно периодически проводить его проверку. В WO-A2-2005/066057 описан способ проверки состояния тормозов лифта. При выполнении начального этапа способа, заключающегося в калибровке, приводной механизм лифта нагружают испытательным грузом и измеряют первый крутящий момент, необходимый для приведения в движение кабины лифта в направлении вверх. В дальнейшем испытательный груз удаляют и закрывают по меньшей мере один из тормозов или тормозных агрегатов лифта. Затем пустая кабина лифта приводится в движение в направлении вверх с усилием, задаваемым вышеуказанным первым крутящим моментом, и осуществляют проверку для выявления движения кабины лифта. В случае выявления движения кабины лифта, вышеуказанный по меньшей мере один тормоз лифта считают неисправным.
В WO-A2-2007/094777 описан аналогичный способ испытания, но отличающийся тем, что вместо использования для калибровки контрольного груза в контроллере каким-то способом, который не раскрывается, задается и запоминается крутящий момент. Когда применяется по меньшей мере один из тормозов, со стороны двигателя прикладывается заданный крутящий момент, вызывающий движение пустой кабины лифта. Любое движение кабины распознается или кодовым датчиком положения, или концевым выключателем шахты. Как и в предыдущем случае, если установлен факт движения кабины лифта, то вышеуказанный по меньшей мере один тормоз лифта считают неисправным.
В обеих вышеупомянутых процедурах тестирования в случае выявления неисправного тормоза лифт выключается из работы и больше не способен выполнять запросы пассажиров на ход лифта. Лифт остается бездействующим до тех пор, пока не будет заменен неисправный тормоз.
В ЕР-А2-1561718 описан еще один способ испытания тормозов лифта, согласно которому включают тормоз и измеряют силу тока, требуемую для приведения в движение тягового шкива в этом заторможенном состоянии. Если измеренное значение силы тока меньше, чем заранее заданное опорное значение силы тока, тормоз считают неисправным и лифт автоматически выводится из эксплуатации.
Целью настоящего изобретения является обеспечение безопасности с одновременным обеспечением максимального рабочего кпд лифта, содержащего кабину, приводимую в движение от двигателя, и по меньшей мере один тормоз для останова кабины. Эта цель достигается способом, включающим шаги включения тормоза, увеличения крутящего момента двигателя до тех пор, пока кабина не придет в движение, сравнения зарегистрированного значения с опорным значением и определения степени превышения зарегистрированным значением опорного значения.
Вместо того, чтобы прикладывать заранее заданный испытательный крутящий момент к тормозу для определения, исправен он или же неисправен, как рассмотрено выше в WO-A2-2005/066057, WO-A2-2007/094777, при этом крутящий момент непрерывно увеличивают до тех пор, пока кабина лифта не придет в движение. Значение, характеризующее этот крутящий момент и, тем самым, характеризующее фактическую тормозную способность или характеристики тормозов, запоминают. При частом повторении способ обеспечивает возможность составления точной записи отображения процесса, отображающей фактическую тормозную способность или характеристики тормозов.
Опорное значение может характеризовать нормативный режим нагрузки, который должен выдерживать тормоз, и поэтому этот этап сравнения способа позволяет автоматически определить, соответствует или не соответствует тормоз этому нормативному режиму нагрузки. Если зарегистрированное значение меньше, чем опорное значение, тогда тормоз неисправен. И наоборот, если зарегистрированное значение больше опорного значения или равно ему, делают вывод, что тормоз исправен.
При неисправном состоянии тормоза способ может включать этапы вывода лифта из эксплуатации и отправки запроса на проведение технического обслуживания в удаленный центр управления.
При исправном состоянии тормоза способ включает дополнительный этап определения степени превышения зарегистрированным значением опорного значения. Таким образом, если зарегистрированное значение превышает опорное значение менее чем на заранее заданное предельное значение, может быть автоматически отправлен в удаленный центр управления запрос на техническое обслуживание. Преимущество этого устройства заключается в том, что техническое обслуживание лифта может осуществляться в качестве профилактики, а не в ответ на возникновение проблемы, как в WO-A2-2005/066057, WO-A2-2007/094777 или ЕР-А2-1561718, где центр технического обслуживания оповещается о проблеме с конкретным лифтом лишь после того, как возникла неисправность тормоза и лифт был автоматически выведен из эксплуатации. При использовании способа, предлагаемого согласно настоящему изобретению, если тормоз конкретного лифта лишь исправен на заранее заданный коэффициент, например на 10%, тогда установка может отправить сигнал, указывающий на этот факт, в удаленный центр управления, который, в свою очередь, может сформировать для обслуживающего персонала лифта заказ на профилактическое техническое обслуживание для замены тормоза до момента его действительного выхода из строя. Между тем, однако, поскольку тормоз действительно признан исправным, лифт может продолжать эксплуатироваться для удовлетворения запросов на ход лифта от жильцов дома.
Ввиду того, что большинство неисправностей тормоза возникает постепенно, в течение длительного периода времени, а не внезапно, предполагается, что этот профилактический подход будет определять значительное большинство тормозов, которые вскоре могут выйти из строя, и тем самым обеспечивать возможность эффективной и плановой замены или ремонта до того, как тормоз действительно выйдет из строя. Соответственно, частота, с которой предлагаемый способ обнаруживает действительную неисправность тормоза, вызывающую автоматическую остановку лифта и последующее неудобство для пользователей, значительно снижается по сравнению с способами из предыдущего уровня техники.
Опорное значение может быть определено процессом калибровки, включающим этапы помещения в кабину испытательного груза, отключения тормоза или каждого тормоза, увеличения крутящего момента двигателя, пока кабина не придет в движение и запоминания в качестве опорного значения такого значения, которое характеризует крутящий момент, вызвавший движение кабины. Испытательный груз может быть выбран таким, чтобы имитировать нормативный режим нагрузки, который должен выдерживать тормоз. Предпочтительно, испытательный груз выбирают таким, чтобы имитировать нагрузку, составляющую по меньшей мере 125% номинальной нагрузки кабины.
Значениями, указывающими на крутящий момент двигателя, могут быть фактические значения крутящего момента или, что удобнее, значения таких параметров двигателя, как ток, напряжение и/или частота, в зависимости от применяемой концепции привода, которые характеризуют крутящий момент двигателя.
Новые признаки и этапы способа, характеризующие изобретение, изложены в формуле изобретении, приведенной ниже. Тем не менее, более полное понимание сущности изобретения, а также других его признаков и преимуществ может быть достигнуто в результате рассмотрения следующего ниже подробного описания совместно с прилагаемыми чертежами, на которых:
Фиг.1 - схематическое изображение типичной лифтовой установки; и
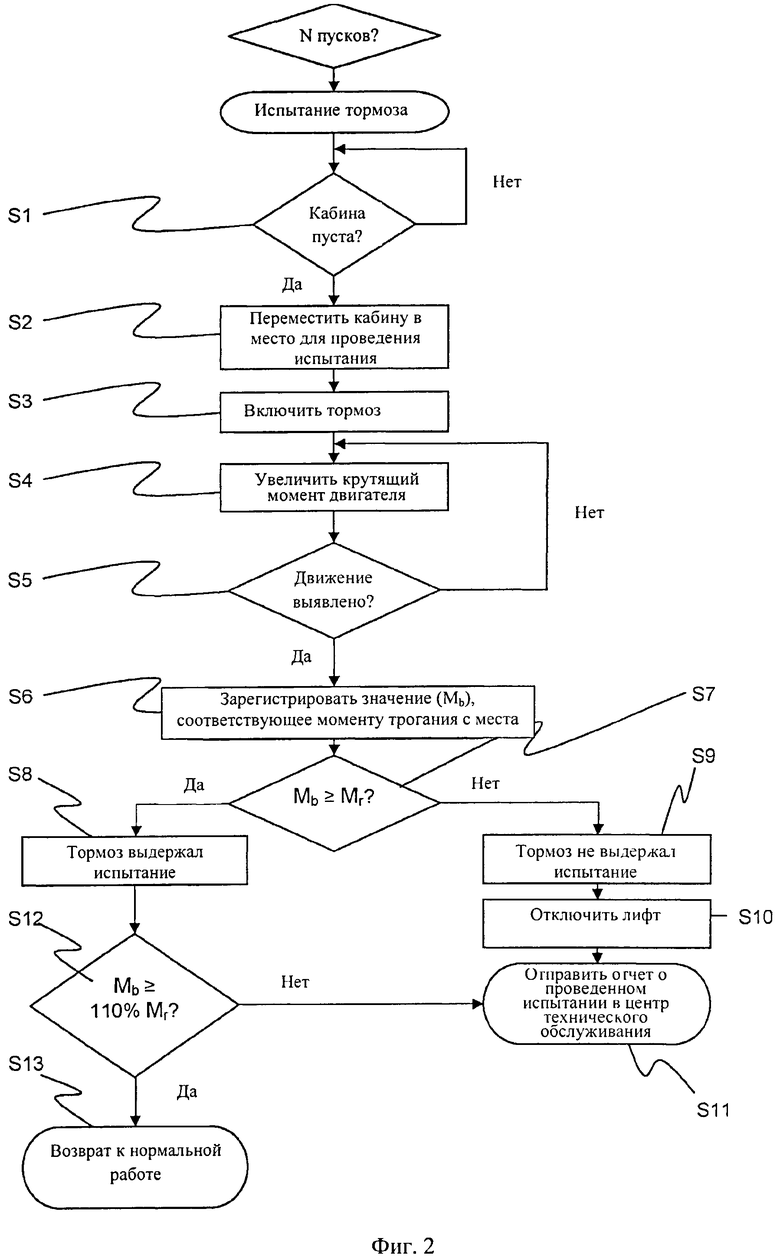
Фиг.2 - блок-схема этапов способа управления лифтом.
На Фиг.1 показана типичная лифтовая установка 1, предназначенная для использования способом согласно изобретению. Установка 1 определяется, в основном, шахтой, ограниченной стенками внутри здания, в которой вдоль направляющих движутся в противоположных направлениях противовес 2 и кабина 4. Подходящее для данной цели тяговое средство 6 поддерживает противовес 2 и кабину 4 и обеспечивает их взаимное соединение. В данном варианте осуществления вес противовеса 2 равен весу кабины 4 плюс 40% номинальной нагрузки, которая может быть размещена в кабине 4. Тяговое средство 6 на одном конце крепится к противовесу 2, огибает отклоняющий ролик 5, расположенный в верхней области шахты, проходит через тяговый шкив 8, также размещенный в верхней области шахты, и крепится к кабине 4 лифта. Разумеется, для специалиста в данной области техники будет очевидным, что в равной степени возможно применение других устройств тяги на канатах или тросах.
Тяговый шкив 8 приводится в действие от приводного вала 10 двигателя 12 и тормозится при помощи по меньшей мере одного тормоза 14, 16 лифта. В большинстве административно-территориальных единиц (см., например, Европейский стандарт EN81-1:1998 12.4.2.1) обязательным является использование по меньшей мере двух тормозных систем. Соответственно, в данном примере используются два независимых электромеханических тормоза 14 и 16. Каждый из тормозов 14, 16 содержит подпружиненную тормозную колодку, разъемно соединенную с соответствующим диском, установленным на приводном валу 10 двигателя 12. В соответствии с другим вариантом, тормозные колодки могут быть расположены так, чтобы воздействовать на тормозной барабан, установленный на приводном валу 10 двигателя 16, как в WO-A2-2007/094777.
Управление и регулирование пуска двигателя 12 и отпускания тормозов 14, 16 осуществляется по командным сигналам С от системы 18 управления. Кроме того, в систему 18 управления постоянно поступают в качестве обратной связи сигналы S, характеризующие состояние двигателя 12 и тормозов 14, 16. Контроль движения приводного вала 10, а значит и кабины 4 лифта осуществляется при помощи кодового датчика 22 положения, установленного на тормозе 16. От кодового датчика 22 положения в систему 18 управления подается сигнал V, что дает возможность определить такие параметры хода кабины 4, как положение, скорость и ускорение.
В состав системы 18 управления входит модем и ретранслятор 20, обеспечивающий ее связь с удаленным центром 26 управления. Такая связь может быть реализована беспроводным способом по коммерческой сотовой сети связи, через обычную телефонную сеть или посредством выделенной линии.
Рассмотрим со ссылкой на блок-схему, представленную на Фиг.2, пример реализации способа.
Каждый из тормозов 14, 16 подвергают испытанию с заданной частотой. В данном примере заданная частота отражается числом совершенных лифтом поездок N с момента последнего испытания тормозов. В соответствии с другим вариантом, заданная частота может отражаться заранее заданным интервалом времени с момента последнего испытания тормозов.
Первый этап S1 в данной процедуре дает возможность убедиться в том, что кабина 4 лифта пуста. Система 18 управления обычно принимает сигналы, указывающие на величину нагрузки кабины и состояние двери, по которым можно определить, пуста ли кабина 4.
Если кабина 4 пуста, процедура испытания тормозов переходит к выполнению второго этапа S2, на котором пустую кабину перемещают в выделенное место для испытаний в шахте. Предпочтительно, место для испытаний соответствует предпоследнему этажу в верхней части здания, так как в этом месте нагрузке, создаваемой пустой кабиной 4, противодействует не только противовес 2, но также и большая часть веса тягового средства 6.
Затем на этапе S3 тормоз 14; 16, подвергаемый испытанию, включают или отпускают с тем, чтобы ввести в зацепление со связанным с ним тормозным диском. Система 18 управления удерживает другой тормоз 16; 14 во выключенном или расцепленном состоянии.
Затем система 18 управления направляет в двигатель 12 команду начать ход вверх с регулируемой скоростью. На этапе S4 система 18 управления увеличивает крутящий момент, прикладываемый к двигателю 12 до тех пор, пока пустая кабина 2 не придет в движение. Как описано выше, такое движение выявляется на этапе S5 кодовым датчиком 22 положения, который, в свою очередь, информирует систему 18 управления. Как только кабина 2 приходит в движение, ход прекращается и включается другой тормоз 14; 16. Значение, характеризующее крутящий момент, который вызвал движение кабины 4, измеряют и запоминают в качестве значения Mb начала движения на этапе S6.
Затем система 18 управления сравнивает значение Mb начала движения с опорным значением Mr, которое устанавливается заранее в процессе калибровки, что объясняется в описании далее. На первом этапе S7 сравнения, если установлено, что значение Mb начала движения больше опорного значения Мr или равно ему, тогда на этапе S8 делают вывод, что тормоз выдержал испытание. В соответствии с другим вариантом, если значение Mb начала движения меньше, чем опорное значение Mr, тогда на этапе S9 делают вывод, что тормоз не выдержал испытание, и после этого на этапе S10 лифт отключается или выводится из эксплуатации, а на этапе S11 системой 18 управления через модем и ретранслятор 20 в центр 26 управления отправляется отчет об испытании. Как правило, отчет об испытании содержит информацию, указывающую на то, что подвергнутый испытанию тормоз 14; 16 неисправен, и удаленный центр 26 управления, в свою очередь, формирует для обслуживающего персонала лифта заявку на техническое обслуживание в ответ на возникновение проблемы для замены дефектного тормоза 14; 16.
Даже если на этапе S7 установлено, что тормоз выдержал испытание, на втором этапе S12 сравнения определяют степень превышения значением Mb начала движения опорного значения Mr. В данном примере, если значение Mb начала движения превышает опорное значение Mr на 10% или более, тогда испытание завершается и на этапе S13 лифт возвращается обратно к нормальной работе. Тем не менее, в противном случае, если значение Mb начала движения превышает опорное значение Mr менее чем на 10%, тогда на этане S11 в центр управления отправляется отчет об испытании. Обычно этот отчет об испытании содержит информацию, указывающую степень, до которой подвергнутый испытанию тормоз 14; 16 прошел испытание, и удаленный центр 26 управления, в свою очередь, может сформировать для обслуживающего персонала лифта заявку на техническое обслуживание в качестве профилактики, чтобы произвести замену тормоза 14; 16 предпочтительно до того, как он действительно станет неисправным.
После этого испытание проводят повторно для другого тормоза 16; 14.
В период начала ввода в эксплуатацию лифтовой установки 1 осуществляют процесс калибровки в соответствии с раскрытием в WO-A2-2005/066057, заключающийся в том, что помещают в кабину 4 лифта испытательный груз 28, увеличивают крутящий момент двигателя 12 до момента обнаружения перемещения вверх кабины 4 при помощи кодового датчика 22 положения и измеряют и запоминают в качестве опорного значения Mr значение, характеризующее крутящий момент, вызвавший перемещение кабины 4.
Выбор контрольного груза 28 производят тщательным образом, чтобы он соответствовал тому режиму нагрузки, для которого должен быть испытан тормоз. В рассматриваемом примере, если требуется, чтобы тормоза 14; 16 удерживали кабину, заключающую в себе нагрузку, на 25% превышающую номинальную нагрузку, то есть 125% номинальной нагрузки, тогда требуемая от тормозов 14; 16 сила торможения составляет 85% номинальной нагрузки, так как противовес 2 уже уравновешивает 40% номинальной нагрузки (125%-40%=85%). Для того чтобы имитировать эту ситуацию при действии крутящего момента двигателя, приводящего кабину 4 в движение в направлении вверх, как в процедуре испытания, изложенной выше, крутящий момент двигателя должен составлять 45% номинальной нагрузки, так как 40% номинальной нагрузки уже обеспечивается противовесом 2. И наконец, для достижения 45%-ного крутящего момента двигателя для подъема вверх при использовании контрольного груза 28, как в процессе калибровки, испытательный груз 28 выбирают так, чтобы он составлял 85% номинальной нагрузки (85% на стороне кабины - 40% на стороне противовеса=45%, которые должны быть скомпенсированы крутящим моментом двигателя).
Процесс калибровки, предпочтительно, проводится при размещении кабины 4 лифта на самой нижней площадке шахты. Во-первых, это, как правило, наиболее удобное место для заноса контрольного груза 28 в здание и последующею помещения его в кабину 4. Хотя при нахождении кабины 4 лифта в этом месте более важное значение имеет несбалансированность тягового средства 6 поперек тягового шкива 8, при этом основная часть ее веса действует на стороне тягового шкива 8, где находится кабина. Таким образом, опорное значение Mr не только учитывает требуемый режим испытательной нагрузки, как изложено выше, но и, кроме того, поддерживает неуравновешенность тягового средства 6 поперек тягового шкива 8. Наоборот, если бы стадия калибровки была проведена при расположении кабины 4 лифта на самой верхней площадке шахты, то значительно большая часть нагрузки тягового средства 6 действовала бы на той стороне тягового шкива 8, где находится противовес, и вычиталась бы из измеренного и запоминаемого опорного значения. Следовательно, такое опорное значение не отвечало бы тому режиму нагрузки, для которого должен быть испытан тормоз.
В рассмотренных выше процедурах фактический крутящий момент двигателя может быть измерен непосредственно. Однако обычно удобнее осуществлять контроль такого параметра двигателя, как ток, напряжение и/или частот, в зависимости от применяемой концепции привода, и записывать значения этого параметра, характеризующие крутящие моменты, требуемые в способе.
Несмотря на то, что способ описан конкретно в отношении лифтов с тяговым шкивом, для специалиста в данной области техники будет очевидным, что он может быть в равной степени применим к другим системам лифтов, например самоподнимающимся лифтам с двигателем, закрепленным к кабине. Аналогично этому, способ может быть применим к лифтам, в которых тормоз или каждый тормоз может быть установлен на кабине таким образом, чтобы входить в сцепление с направляющей.
Если система лифта перекомпенсирована, например, когда вес компенсационной цепи или ходового каната больше веса тягового средства, специалисту в данной области техники будет понятно, что отведенные для кабины места для проведения процесса калибровки и проведения испытания тормозов следует изменить на обратные.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ КАНАТНЫХ ЛИФТОВ СО ВСТРОЕННЫМ ГРУЗОИЗМЕРИТЕЛЬНЫМ УСТРОЙСТВОМ | 2001 |
|
RU2271327C2 |
| Устройство и способ управления движением кабины лифта | 2015 |
|
RU2655257C1 |
| УПРАВЛЕНИЕ КРУТЯЩИМ МОМЕНТОМ ПРИ ТОРМОЖЕНИИ | 2009 |
|
RU2484004C2 |
| БЕЗРЕДУКТОРНЫЙ ЛИФТ С ТРОСОВЫМ ПРИВОДОМ | 2001 |
|
RU2278812C2 |
| СПОСОБ КОНТРОЛЯ ТОРМОЗНОГО МЕХАНИЗМА ПОДЪЕМНОЙ УСТАНОВКИ, СПОСОБ ПУСКА ПОДЪЕМНОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ПУСКА | 2007 |
|
RU2429186C2 |
| ПОДЪЕМНАЯ МАШИНА (ВАРИАНТЫ) И СПОСОБ ИЗМЕРЕНИЯ НАГРУЗКИ В ПОДЪЕМНОЙ СИСТЕМЕ | 2005 |
|
RU2423311C2 |
| АВАРИЙНЫЙ ТОРМОЗ С ВОЗВРАТОМ В ИСХОДНОЕ ПОЛОЖЕНИЕ | 2012 |
|
RU2600424C2 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| СТОПОРНЫЙ ТОРМОЗ С БЛОКИРОВОЧНЫМ МЕХАНИЗМОМ | 2011 |
|
RU2555252C2 |
Способ эксплуатации лифта (1), имеющего кабину (4), приводимую в движение от двигателя (12), и по меньшей мере один тормоз (14; 16) для останова кабины (4), включает операции включения тормоза (S3), увеличения крутящего момента двигателя до тех пор, пока кабина не придет в движение (S4) и регистрации значения (Мb), указывающего крутящий момент двигателя, при котором кабина (4) приходит в движение (S6). Изобретение обеспечивает повышение удобства эксплуатации лифта. 8 з.п. ф-лы, 2 ил.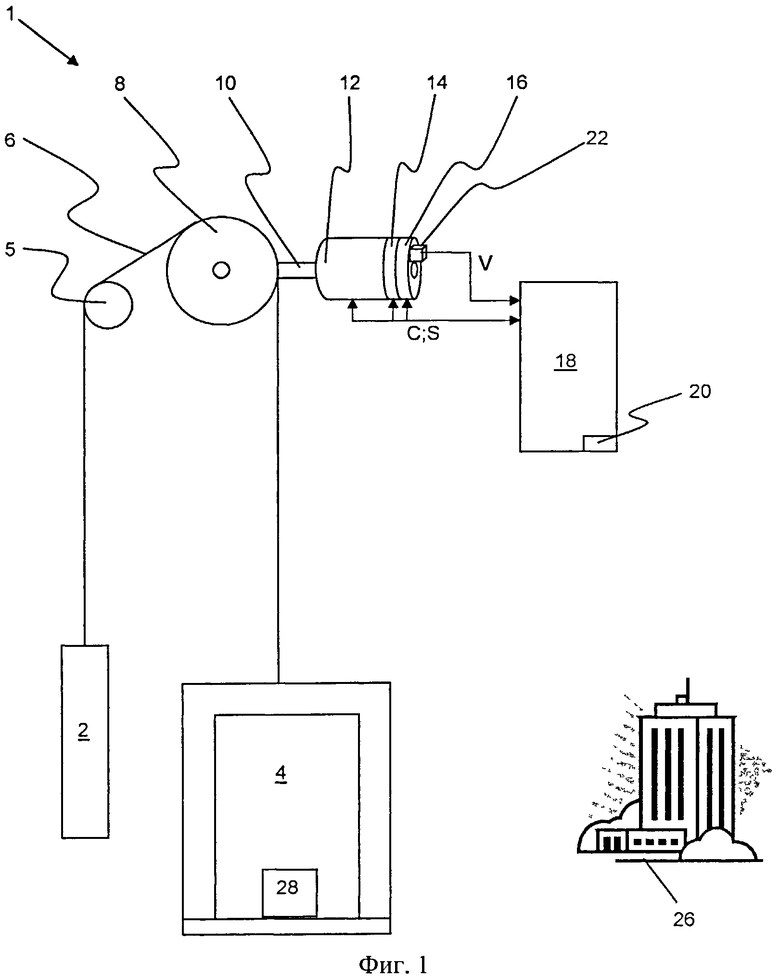
1. Способ эксплуатации лифта (1), содержащего кабину (4), приводимую в движение от двигателя (12), и по меньшей мере один тормоз (14, 16) для останова кабины (4), при этом способ включает следующие этапы, на которых:
включают тормоз (S3);
увеличивают крутящий момент двигателя до тех пор, пока кабина не придет в движение (S4);
регистрируют значение (Mb), указывающее на крутящий момент, при котором кабина приходит в движение (S6);
сравнивают зарегистрированное значение с опорным значением (Mr); и
определяют степень превышения зарегистрированным значением (Mb) опорного значения (Mr).
2. Способ по п.1, дополнительно включающий этап (S9) установления неисправности тормоза (14, 16), если зарегистрированное значение (Mb) меньше опорного значения (Mr).
3. Способ по п.2, дополнительно включающий этап вывода лифта из эксплуатации (S10).
4. Способ по п.2 или 3, дополнительно включающий этап (S11) отправки заявки на техобслуживание в удаленный центр (26) управления.
5. Способ по п.1, дополнительно включающий этап (S8) установления того, что тормоз (14, 16) выдержал испытание, если зарегистрированное значение (Mb) больше опорного значения (Mr) или равно ему.
6. Способ по п.1 или 5, дополнительно включающий этап (S11) отправки заявки на техобслуживание в удаленный центр (26) управления, если зарегистрированное значение (Mb) больше опорного значения, по меньшей мере, на заранее заданное допустимое предельное значение.
7. Способ по п.6, отличающийся тем, что заранее заданное допустимое предельное значение равно по меньшей мере 10%.
8. Способ по любому из пп.1-3, отличающийся тем, что опорное значение (Mr) определяют путем проведения калибровки, предусматривающей этапы помещения в кабину (4) испытательного груза (28), выключения тормоза или каждого тормоза (14; 16), увеличения крутящего момента двигателя (12) до тех пор, пока кабина (4) лифта не придет в движение и запоминания значения, характеризующего крутящий момент, вызвавший движение кабины (4), в качестве опорного значения (Mr).
9. Способ по п.8, отличающийся тем, что испытательный груз (28) выбирают так, чтобы имитировать нагрузку, составляющую по меньшей мере 125% номинальной нагрузки кабины (4).
| EP1561718 A2, 10.08.2005 | |||
| WO2004035448 A2, 29.04.2004 | |||
| WO2005066057 A2, 21.07.2005 | |||
| Способ определения тормозного усилия подъемной установки | 1987 |
|
SU1518261A1 |

