Предлагаемое изобретение относится к области спутниковой навигации и предназначено для определения задержки сигналов глобальных навигационных спутниковых систем (ГНСС) в ионосфере с помощью двухчастотной навигационной аппаратуры потребителя (НАП).
При распространении сигнала на трассе навигационный космический аппарат (НКА) - потребитель - этот сигнал проходит через ионосферу, которая содержит значительное число свободных электронов. Скорость распространения спутникового навигационного сигнала в ионосфере зависит от числа свободных электронов на его пути. При прохождении навигационного сигнала через ионосферу на рабочей частоте (1,6 ГГц) задержка сигнала в ионосфере составляет от 2 до 10 метров. Главными факторами, оказывающими влияние на величину задержки сигнала, являются: солнечная активность, угол места НКА, время (суток, года, фазы 11-летнего цикла солнечной активности), географические координаты потребителя.
Известен способ двухчастотного определения задержки сигнала в ионосфере [1], по которому определяют псевдодальности кодовых измерений на двух несущих частотах. Способ основан на зависимости диэлектрической проницаемости среды от частоты.
Недостатком данного способа является большая систематическая погрешность, которая возникает из-за разницы задержек сигналов в трактах двухчастотной НАП. Для компенсации погрешности применяется калибровка аппаратуры, поскольку в противном случае систематическая погрешность при определении параметров ионосферы может превышать задержку сигнала в ионосфере. Процедура калибровки ресурсозатратна, поскольку для исключения систематической погрешности необходимо выполнять ее перед каждым сеансом наблюдений. Поэтому, как правило, калибровка НАП применяется только в приемниках геодезического класса.
Наиболее близким к заявляемому изобретению является способ одночастотного определения задержки сигналов навигационной спутниковой системы в ионосфере, по которому измеряют псевдодальности по дальномерному коду и фазе несущей частоты, определяют приращения псевдодальностей за время между текущими и предыдущими измерениями, вычисляют разности приращений псевдодальностей и при помощи фильтра Калмана определяют задержку сигнала в ионосфере [2]. При реализации способа характерно отсутствие систематической погрешности, определяемой задержкой сигнала в трактах НАП.
К недостаткам известного способа следует отнести наличие значительной шумовой погрешности кодовых измерений. При этом известно, что шумовая погрешность кодовых измерений превышает шумовую погрешность измерений по фазе несущей [3].
В основу изобретения положена задача повышения точности определения задержки сигнала в ионосфере за счет исключения кодовых измерений и применения измерений фазовой псевдодальности на двух несущих частотах.
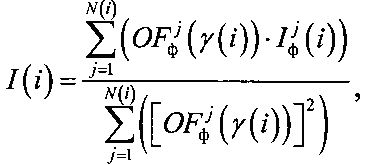
Поставленная задача решается тем, что в способе определения задержки сигналов навигационной спутниковой системы в ионосфере, по которому измеряют фазовую псевдодальность на несущей частоте, определяют приращение псевдодальности за время между текущим и предыдущим измерениями, согласно изобретению измерение фазовых псевдодальностей и вычисление их приращений осуществляют на двух несущих частотах, затем вычисляют разность между полученными приращениями, а задержку сигналов навигационной спутниковой системы в ионосфере определяют по формуле:
где - накопленное значение наклонного фактора для j-го НКА;
- накопленное значение наклонного фактора для j-го НКА;
i - текущий момент времени, с;
j - номер навигационного космического аппарата, j=1,2,…,n;
k - коэффициент фильтрации, 0<k<1;
N(i) - количество навигационных космических аппаратов, видимых в текущий момент времени i;
 - приращение наклонного фактора;
- приращение наклонного фактора;
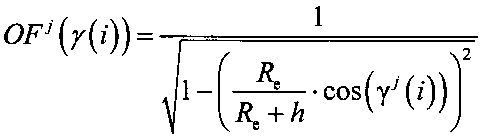
 - наклонный фактор;
- наклонный фактор;
Re - радиус Земли, м;
h - средняя высота ионосферного слоя, м;
 - угол места j-го НКА, град;
- угол места j-го НКА, град;
 - накопленное значение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
- накопленное значение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
 - приращение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
- приращение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
f1, f2 - несущая частота для частотного диапазона L1, L2 соответственно, Гц;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
- приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f2, м.
- приращение фазовой псевдодальности, измеренной на несущей частоте f2, м.
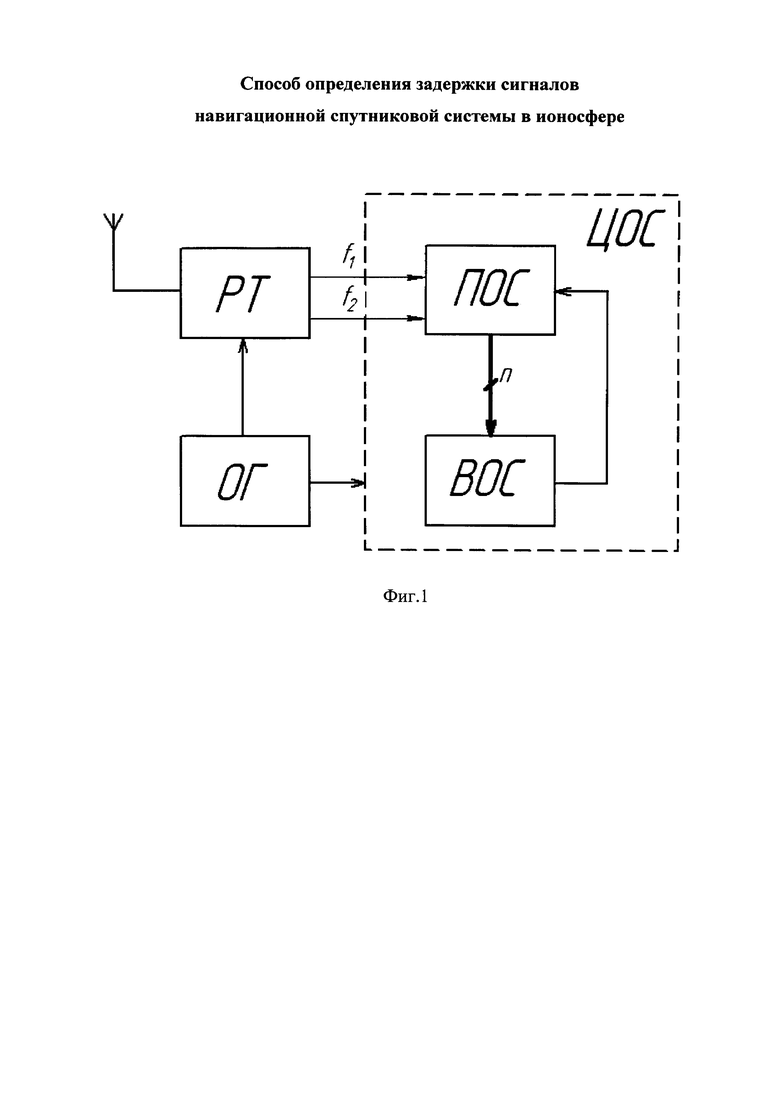
На фиг. 1 представлена структурная схема навигационной аппаратуры потребителя, на фиг. 2 приведена блок-схема алгоритма, реализующего предлагаемый способ определения задержки сигналов навигационной спутниковой системы в ионосфере.
Навигационная аппаратура потребителя включает следующие блоки: антенну, радиотракт (РТ), опорный генератор (ОГ) и блок цифровой обработки сигналов (ЦОС). При этом блок цифровой обработки сигналов содержит блок первичной обработки сигналов (ПОС) и блок вторичной обработки сигналов (ВОС).
На вход антенного блока поступают навигационные сигналы от НКА, затем в РТ навигационный сигнал разделяется на два канала на несущих частотах f1 и f2, где навигационный сигнал фильтруется и усиливается. С выхода РТ сигналы поступают на блок ПОС, где производятся измерения псевдодальностей и других параметров для каждого НКА, которые затем передаются в блок ВОС, где заявляемый способ может быть реализован на программном уровне с применением микропроцессорного вычислительного модуля, например АМ4379 фирмы Texas Instrumets, или с применением аналогичного вычислителя, реализованного в программируемой логической интегральной схеме, в соответствии с блок-схемой алгоритма (фиг. 2).
В заявляемом способе используется модель ионосферы, согласно которой ионосфера представляет собой тонкий равномерный слой на некоторой высоте h. Используя данную модель ионосферы, вертикальную задержку навигационного спутникового сигнала можно найти из следующего выражения [3]:

где - наклонный фактор j-го НКА;
- наклонный фактор j-го НКА;
Re - радиус Земли, м;
h - средняя высота ионосферного слоя, м;
 - угол места j-го НКА, град;
- угол места j-го НКА, град;
 - наклонная задержка навигационного спутникового сигнала в ионосфере j-го НКА, м;
- наклонная задержка навигационного спутникового сигнала в ионосфере j-го НКА, м;
f1,f2 - несущая частота для частотного диапазона L1 и L2 соответственно, Гц;
 и
и  - фазовая псевдодальность на несущей частоте f1, f2 соответственно, м.
- фазовая псевдодальность на несущей частоте f1, f2 соответственно, м.
 - вертикальная задержка навигационного спутникового сигнала в ионосфере, м;
- вертикальная задержка навигационного спутникового сигнала в ионосфере, м;
i - текущий момент времени, с;
j - номер навигационного космического аппарата, j=1,2,…,n;
N(i) - количество навигационных космических аппаратов, видимых в текущий моменты времени i.
Прямые измерения фазовой псевдодальности содержат систематические погрешности и фазовую неоднозначность [3]. На малом временном интервале данные погрешности можно считать постоянными, соответственно в приращениях прямых измерений можно считать, что погрешности отсутствуют.
Осуществив переход к приращениям соответствующих измерений, определим приращение наклонной задержки в ионосфере для j-го НКА:

где  - приращение наклонного фактора для j-го НКА;
- приращение наклонного фактора для j-го НКА;
 - приращение вертикальной задержки навигационного спутникового сигнала в ионосфере, м.
- приращение вертикальной задержки навигационного спутникового сигнала в ионосфере, м.
Известно, что вертикальная задержка является медленно меняющейся функцией от времени, соответственно приращения вертикальной задержки будут очень малы, поэтому вторым слагаемым правой части уравнения (2) можно пренебречь. В итоге получим систему уравнений для определения вертикальной задержки сигнала Iв:
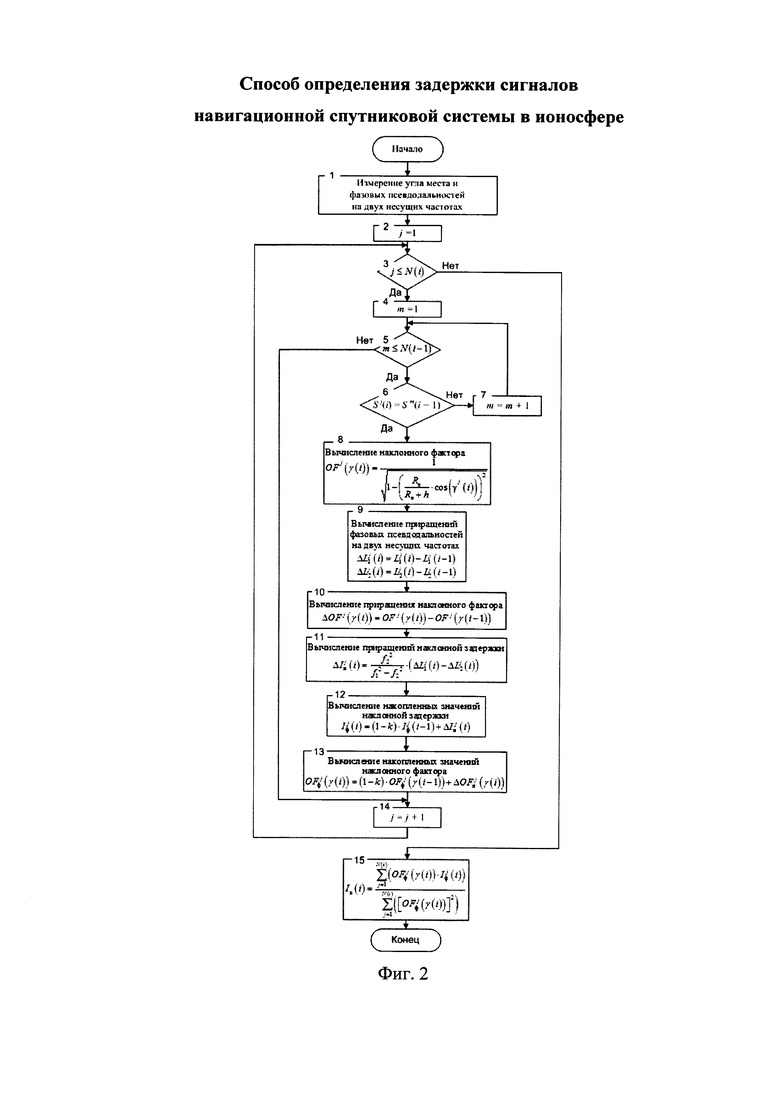
Последовательность действий для решения системы уравнений (3) представлена на фиг. 2. В соответствии с этой блок-схемой сначала производят измерения угла места и фазовых псевдодальностей на двух несущих частотах (оператор 1). На следующем шаге инициализируют переменную j (оператор 2) и проверяют условие окончания цикла, где N(i) - количество НКА, видимых в текущий момент времени i (оператор 3).
Для осуществления заявляемого способа необходимо, чтобы количество НКА и их номера в текущий момент времени i и предыдущий момент времени i-1 совпадали.
Для этого на следующем шаге инициализируют переменную m (оператор 4) и проверяют условие окончания цикла, где N(i-1) - количество НКА, видимых в предыдущий момент времени i-1 (оператор 5). Затем сравнивают номера НКА, видимых в текущий и предыдущий момент времени (оператор 6), где S(i) - номер НКА в текущий момент времени, а S(i-1) - номер НКА в предыдущий момент времени.
Если номера НКА не совпадают, то дальнейший расчет параметров для данного НКА не производят, а увеличивают переменную m (оператор 7) и проверяют условие окончания цикла (оператор 5). Как только условие цикла (оператор 5) становится ложным, то увеличивают переменную j (оператор 14) и алгоритм повторяется, пока выполняется условие цикла (оператор 3).
Если номера НКА (оператор 6) совпадают, то на следующем шаге вычисляют наклонный фактор (оператор 8). Затем вычисляют приращения фазовых псевдодальностей на двух несущих частотах для j-го НКА (оператор 9):

Аналогично находят приращение наклонного фактора для j-го НКА (оператор 10):

Затем вычисляют приращение наклонной задержки для j-го НКА (оператор 11):

При использовании приращений измерений наклонный фактор и наклонная задержка сигнала изменяются незначительно, но при этом шумовая погрешность измерений остается неизменной. В результате шумовая погрешность измерений может превышать полезный сигнал. Для исключения данного недостатка необходимо накапливать измерения.
Поскольку фазовые псевдодальности поступают непрерывно, то при применении статичного интервала накопления накладываются дополнительные ограничения на аппаратуру потребителя, так как увеличивается объем хранимой информации.
Предлагаемый способ реализуется в режиме реального времени. Для того чтобы уменьшить объем хранимой информации, применяется сумма с накоплением (оператор 12). Определим накопленное значения наклонной задержки сигнала в ионосфере для j-го НКА:

Для уменьшения влияния предыдущих измерений каждое предыдущее измерение умножается на (1-k), где k - коэффициент фильтрации, причем всегда выполняется условие, что 0<k<1, процедура повторяется для каждого последующего измерения. Такой подход позволяет использовать последующее измерение для уточнения текущего решения.
Коэффициент фильтрации k выбирается по результатам экспериментальных исследований таким образом, чтобы уменьшить влияние шумовой погрешности на вертикальную задержку, но при этом оставить неизменным исходный ряд вертикальной задержки сигнала в ионосфере.
Аналогично определяют накопленные приращения наклонного фактора (оператор 13) для j-го НКА:

Затем увеличивают на единицу переменную j (оператор 14) и проверяют условие окончания цикла (оператор 3). Вертикальную задержку навигационного спутникового сигнала в ионосфере вычисляют после того, как условие цикла становится ложным (оператор 3).
После решают систему уравнений (3) с помощью метода наименьших квадратов и определяют вертикальную задержку навигационного спутникового сигнала в ионосфере (оператор 15):
Таким образом, предлагаемый способ позволяет определять вертикальную задержку навигационного спутникового сигнала в ионосфере в режиме реального времени, используя для этого измерения фазовых псевдодальностей на двух несущих частотах.
Применение измерений фазовых псевдодальностей на двух несущих частотах позволило уменьшить влияние шумовой погрешности на определение задержки навигационного сигнала в ионосфере, поскольку известно, что шумовая погрешность фазовых измерений на несколько порядков ниже, чем кодовых измерений, применяемых в прототипе [3].
В заявляемом способе исключена систематическая погрешность, обусловленная задержкой сигнала в трактах НАП, за счет применения приращений соответствующих измерений.
Источники информации
1. IS-GPS-200, Revision Е, 8 June 2010. - 185 p.
2. Пат. RU 2208809, МПК7 G01S 5/02, G01S 1/32, Н04В 7/185. Способ одночастотного определения задержки сигналов навигационной спутниковой системы в ионосфере / Казанцев М.Ю., Кокорин В.И., Фатеев Ю.Л.; заявитель ГОУ ВПО «Красноярский государственный технический университет». - №2002104727/09; заявл. 21.02.2002. опубл. 20.07.2003.
3. Антонович К.М. Использование спутниковых радионавигационных систем в геодезии. В 2 т. Т. 1. Монография / К.М. Антонович; ГОУ ВПО "Сибирская государственная геодезическая академия". М.: ФГУП "Картгеоцентр", 2005. - 334 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХЧАСТОТНЫЙ ФАЗОВЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2019 |
|
RU2717098C1 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2002 |
|
RU2208809C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ИОНОСФЕРНОЙ ОШИБКИ ДАЛЬНОСТЕЙ ПО ДВУХЧАСТОТНЫМ ИЗМЕРЕНИЯМ | 2005 |
|
RU2333507C2 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСТОТЫ И ШКАЛЫ ВРЕМЕНИ УДАЛЕННЫХ ПУНКТОВ | 2015 |
|
RU2585325C1 |
| СПОСОБ ПРЕДСКАЗАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2006 |
|
RU2332692C1 |
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ (ГСО) И/ИЛИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСИНХРОННОЙ НАКЛОННОЙ ОРБИТЕ (ГСНО) С ПОМОЩЬЮ ЗЕМНЫХ СТАНЦИЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2474845C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2006 |
|
RU2313103C1 |
Изобретение относится к области спутниковой навигации и может быть использовано для определения ионосферной задержки сигнала глобальных спутниковых навигационных систем с помощью двухчастотной навигационной аппаратуры потребителя. Технический результат состоит в повышении точности определения задержки сигнала в ионосфере за счет исключения кодовых измерений и применения измерений фазовой псевдодальности на двух несущих частотах. Для этого в способе определение ионосферной задержки производится путем решения системы уравнений, составленной по разностям приращений фазовых псевдодальностей на двух несущих частотах. 2 ил.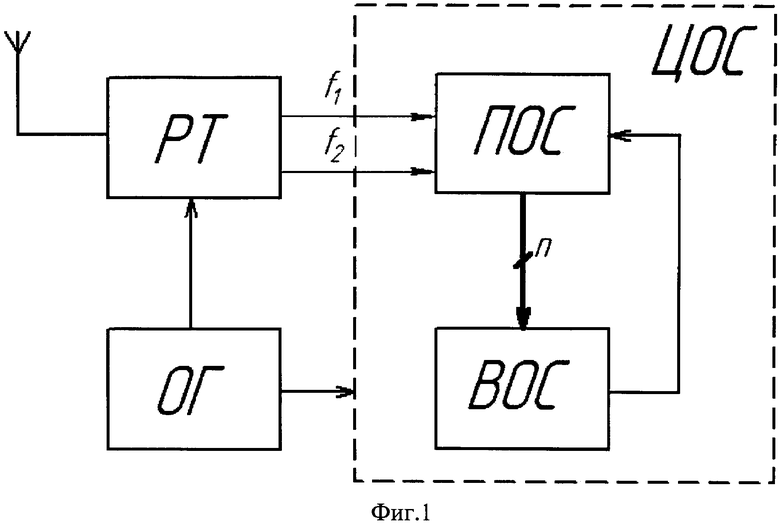
Способ определения задержки сигналов навигационной спутниковой системы в ионосфере, по которому измеряют фазовую псевдодальность на несущей частоте, определяют приращение псевдодальности за время между текущим и предыдущим измерениями, отличающийся тем, что измерение фазовых псевдодальностей и вычисление их приращений осуществляют на двух несущих частотах, затем вычисляют разность между полученными приращениями, а задержку сигналов навигационной спутниковой системы в ионосфере определяют по формуле:
где  - накопленное значение наклонного фактора для j-го НКА;
- накопленное значение наклонного фактора для j-го НКА;
i - текущий момент времени, с;
j - номер навигационного космического аппарата, j=1, 2, …, n;
k - коэффициент фильтрации, 0<k<1;
N(i) - количество навигационных космических аппаратов, видимых в текущий момент времени i;
ΔOFj(γ(i))=OFj(γ(i))-OFj(γ(i-1)) - приращение наклонного фактора;
 - наклонный фактор;
- наклонный фактор;
Re - радиус Земли, м;
h - средняя высота ионосферного слоя, м;
γj(i) - угол места j-го НКА, град;
 - накопленное значение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
- накопленное значение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
 - приращение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
- приращение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
f1, f2 - несущая частота для частотного диапазона L1 и L2 соответственно, Гц;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
- приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f2, м.
- приращение фазовой псевдодальности, измеренной на несущей частоте f2, м.
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2002 |
|
RU2208809C1 |
| СИСТЕМА СВЯЗИ С РЕТРАНСЛЯТОРАМИ, ИЗМЕНЯЮЩИМИ СВОЕ МЕСТОПОЛОЖЕНИЕ В ПРОСТРАНСТВЕ | 2007 |
|
RU2352067C1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |

