Изобретение относится к глобальным навигационным спутниковым системам.
Из уровня техники известен (см. патент. США на изобретение US 7532161, опубл. 12.05.2009) метод и устройство для приема оценок задержки радиосигнала в диапазоне L1 в ионосфере и скорости изменения задержки радиосигнала в диапазоне L1 в ионосфере, приема наклонной ионосферной ошибки радиосигнала с КА на ГСО, приема потребительской вертикальной ионосферной ошибки для КА на ГСО и вычисления оценки величины межчастотных L1/L5 смещений с помощью оценок задержки радиосигнала в диапазоне L1 в ионосфере и скорости измерения задержки радиосигнала в диапазоне L1 в ионосфере и наклонной ионосферной ошибки для КА на ГСО. Широкозонная система функционального дополнения (WAAS) использует оценку межчастотных L1/L5 смещений. Смещение L1/L5 является дифференциальным смещением между радиосигналами в диапазонах L1 и L5 КА WAAS на ГСО. Данные, использованные для оценки смещения L1/L5 включают задержку радиосигнала в диапазоне L1 КА на ГСО в ионосфере, вычисленную с помощью фильтра Калмана, и приема наклонной ионосферной задержки радиосигнала с КА на ГСО, рассчитанной с использованием данных по ионосферной сетке WAAS сообщения. Среднеквадратическая погрешность вертикальной ионосферной ошибки потребителя (UIVE) используется как одно из условий выполнения оценки смещения L1/L5.
Недостатком изобретения является зависимость от других источников информации о величине ионосферной задержки радиосигнала в диапазоне L1, т.к. используются дополнительные источники информации о величине данной задержки (WAAS сообщения), которые сообщают земной станции (ЗС) данные о величине вертикальной ионосферной задержки радиосигнала в диапазоне L1 в узлах ионосферной сетки, что снижает надежность работы системы.
Техническим результатом заявленного изобретения является повышение надежности работы системы за счет автономной оценки задержки, вызванной ионосферной рефракцией, в земных станциях (без дополнительных источников информации).
Технический результат достигается тем, что система формирования навигационных радиосигналов навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или навигационных космических аппаратов (НКА) на геосинхронной наклонной орбите (ГСНО) с помощью земных станций (ЗС) состоит из орбитальной группировки НКА на ГСО и/или НКА на ГСНО и ЗС по числу НКА на ГСО и/или НКА на ГСНО, при этом НКА на ГСО и/или НКА на ГСНО соединены по каналам связи с ЗС, каждый НКА на ГСО и/или НКА на ГСНО включает в себя делитель, состоящий из последовательно соединенных приемного антенно-фидерного устройства (АФУ), бортового радиотехнического ретранслятора (БРТР) и передающего АФУ соответственно, а каждая ЗС состоит из детектора, управляемого генератора, состоящего из передающего АФУ ЗС, блока преобразования частоты и усиления, формирователя навигационного радиосигнала, управляемого генератора (УГ) огибающих колебаний, УГ несущих колебаний, детектор состоит из приемного АФУ ЗС, высокочастотной части многоканального приемного устройства, аналого-цифрового преобразователя, навигационного процессора, первого, второго и третьего каналов параллельной обработки, при этом каждый канал параллельной обработки состоит из первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого умножителей, первого, второго, третьего и четвертого накопительных сумматоров, управляемого генератора схемы слежения за задержкой (УГ ССЗ), управляемого генератора системы фазовой автоподстройки частоты (УГ ФАПЧ), при этом на первый вход формирователя навигационного радиосигнала поступает эфемеридно-временная информация (ЭВИ), на второй вход формирователя навигационного радиосигнала поступает сигнал точного времени, выход формирователя навигационного радиосигнала соединен с входом блока преобразования частоты и усиления и со вторым входом высокочастотной части многоканального приемного устройства, выход блока преобразования частоты и усиления соединен с входом передающего АФУ ЗС, выход приемного АФУ ЗС соединен с первым входом высокочастотной части многоканального приемного устройства, выход которого подключен к входу аналого-цифрового преобразователя, выход аналого-цифрового преобразователя соединен с первыми входами первого и второго умножителей первого, второго и третьего каналов параллельной обработки соответственно, выход второго умножителя соединен с первыми входами четвертого, шестого и седьмого умножителей, выход четвертого умножителя подключен к входу второго накопительного сумматора, выход второго накопительного сумматора соединен с первым входом пятого умножителя, выход первого умножителя соединен с первым входом третьего умножителя, выход третьего умножителя подключен к входу первого накопительного сумматора, выход первого накопительного сумматора соединен со вторым входом пятого умножителя, выход первого накопительного сумматора первого, второго и третьего каналов параллельной обработки соединен с третьим, шестым и седьмым входами навигационного процессора соответственно, выход шестого умножителя соединен с входом третьего накопительного сумматора, выход третьего накопительного сумматора подключен ко второму входу восьмого умножителя, выход седьмого умножителя соединен с входом четвертого накопительного сумматора, выход четвертого накопительного сумматора подключен к первому входу восьмого умножителя, выход восьмого умножителя соединен с входом УГ ССЗ, первый выход УГ ССЗ соединен со вторыми входами третьего и четвертого умножителя, второй и третий выход УГ ССЗ соединены со вторыми входами седьмого и шестого умножителей соответственно, четвертый выход УГ ССЗ первого, второго и третьего каналов параллельной обработки соединен со вторым, четвертым и пятым входом навигационного процессора соответственно, выход пятого умножителя соединен с входом УГ ФАПЧ, первый и второй выходы УГ ФАПЧ соединены со вторыми входами второго и первого умножителей соответственно, третий выход УГ ФАПЧ первого, второго и третьего каналов параллельной обработки соединен с первым, восьмым и девятым входами навигационного процессора соответственно, выход навигационного процессора соединен с входами УГ огибающих колебаний и УГ несущих колебаний, выходы УГ несущих колебаний и УГ огибающих колебаний соединены с третьим и четвертым входами формирователя навигационного радиосигнала соответственно.
Способ формирования навигационных радиосигналов навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или навигационных космических аппаратов (НКА) на геосинхронной наклонной орбите (ГСНО) с помощью земных станций (ЗС) заключается в том, что:
- дополняют навигационную спутниковую систему орбитальной группировкой НКА на ГСО и/или НКА на ГСНО;
- размещают ЗС по числу НКА на ГСО и/или НКА на ГСНО, принимающие эфемеридно-временную информацию (ЭВМ) из центра управления системой (ЦУС) и сигнал точного времени из центрального синхронизатора системы, при этом каждая ЗС осуществляет формирование служебного навигационного радиосигнала путем модуляции несущих колебаний двоичными символами периодической дальномерной псевдослучайной последовательности (ПСП), и сложение по модулю два с символами эфемеридно-временной информации;
- ЗС излучает фазоманипулированный служебный навигационный радиосигнал в направлении НКА на ГСО и/или НКА на ГСНО и фиксирует момент излучения служебного навигационного радиосигнала в направлении НКА на ГСО и/или НКА на ГСНО,
- НКА на ГСО и/или НКА на ГСНО формирует служебный навигационный радиосигнал путем однократного преобразования несущей частоты принятого служебного навигационного радиосигнала ЗС с переносом спектра служебного навигационного радиосигнала ЗС на новую несущую частоту в том же частотном диапазоне, что и несущая частота служебного навигационного радиосигнала ЗС;
- НКА на ГСО и/или НКА на ГСНО формирует потребительский навигационный радиосигнал путем однократного преобразования несущей частоты принятого служебного навигационного радиосигнала ЗС и переносит в диапазон частот, выделенный для радионавигационной службы в направлении Космос-Земля и излучает его потребителю;
- НКА на ГСО и/или НКА на ГСНО излучает потребительский и служебный навигационные радиосигналы на ЗС для оценки времени распространения навигационных радиосигналов и расчета величины ионосферной задержки;
- ЗС вычисляет оценку времени распространения навигационных радиосигналов с использованием данных о моменте излучения служебного навигационного радиосигнала в направлении НКА на ГСО и/или НКА на ГСНО, по формуле:
 , где
, где
SГСНО - запросное измерение дальности по служебному навигационному радиосигналу;
δКА - аппаратурная задержка бортового радиотехнического ретранслятора (БРТР);
δПРМ - аппаратурная задержка навигационного радиосигнала в приемнике;
δион - задержка распространения сигнала НКА на ГСО или НКА на ГСНО в ионосфере;
c - скорость света;
- ЗС автономно рассчитывает величину ионосферной задержки по значениям несущих частот и первичным псевдодальностям служебного и потребительского навигационных радиосигналов, по формуле:
 , где
, где
f1 - значение несущей частоты служебного навигационного радиосигнала;
f2 - значение несущей частоты потребительского навигационного радиосигнала;
S1 - первичное измерение псевдодальности на частоте служебного навигационного радиосигнала;
S2 - первичное измерение псевдодальности на частоте служебного навигационного радиосигнала;
- полученные в результате оценки величины задержки времени распространения и задержки в ионосфере навигационного радиосигнала используются ЗС для расчета начальных фаз огибающих и несущих колебаний;
- ЗС формирует навигационный радиосигнал с использованием рассчитанных начальных фаз и излучает его на НКА на ГСО и/или НКА, на ГСНО, при этом начальные фазы огибающих и несущих колебаний рассчитаны таким образом, что радиосигнал на радиолиниях Земля-Космос и Космос-Земля, проходя через ионосферу, приводил к взаимной синхронизации несущих и огибающих колебаний.
Сущность и признаки заявленного изобретения в дальнейшем поясняются чертежами, где показано следующее:
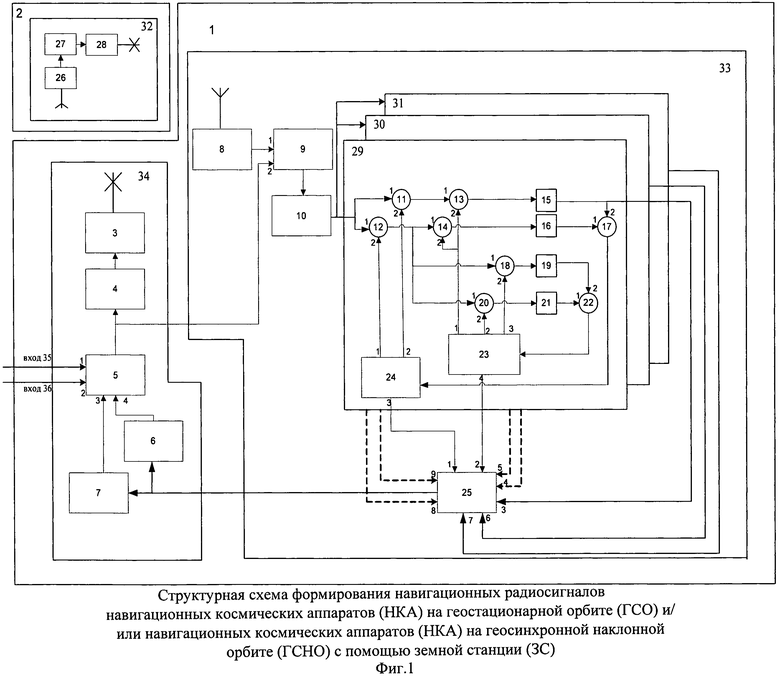
На фиг.1 - структурная схема формирования навигационных радиосигналов навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или навигационных космических аппаратов (НКА) на геосинхронной наклонной орбите (ГСНО) с помощью земной станции (ЗС), где:
1 - земная станция (ЗС);
2 - навигационный космический аппарат (НКА) на ГСО и/или НКА на ГСНО;
3 - передающее антенно-фидерное устройство (АФУ) ЗС;
4 - блок преобразования частоты и усиления;
5 - формирователь навигационного радиосигнала;
6 - управляемый генератор (УГ) огибающих колебаний;
7 - управляемый генератор (УГ)несущих колебаний;
8 - приемное АФУ ЗС;
9 - высокочастотная часть многоканальногоприемного устройства;
10 - аналого-цифровой преобразователь;
11 - первый умножитель;
12 - второй умножитель;
13 - третий умножитель;
14 - четвертый умножитель;
15 - первый накопительный сумматор;
16 - второй накопительный сумматор;
17 - пятый умножитель;
18 - шестой умножитель;
19 - третий накопительный сумматор;
20 - седьмой умножитель;
21 - четвертый накопительный сумматор;
22 - восьмой умножитель;
23 - управляемый генератор схемы слежения за задержкой (ССЗ);
24 - управляемый генератор системы фазовой автоподстройки частоты (ФАПЧ);
25 - навигационный процессор;
26 - приемное АФУ НКА;
27 - бортовой радиотехнический ретранслятор (БРТР);
28 - передающее АФУ НКА;
29 - первый канал параллельной обработки;
30 - второй канал параллельной обработки;
31 - третий канал параллельной обработки;
32 - бортовой радиотехнический комплекс (БРТК) с преобразованием частоты;
33 - детектор;
34 - управляемый генератор;
35 - вход эфемеридно-временной информации;
36 - вход сигнала точного времени.
На фиг.2а, б - общая схема формирования навигационных радиосигналов навигационных космических аппаратов на геостационарной и/или навигационных космических аппаратов на геосинхронной наклонной орбите с помощью земной станции, где:
1 - земная станция (ЗС);
2 -навигационный космический аппарат на ГСО и/или НКА на ГСНО;
32 - бортовой радиотехнический комплекс (БРТК) с преобразованием частоты;
33 - детектор;
34 - управляемый генератор;
35 - вход эфемеридно-временной информации;
36 - вход сигнала точного времени.
37 - потребительский навигационный радиосигнал;
38 - служебный навигационный радиосигнал;
39 - аппаратура потребителя.
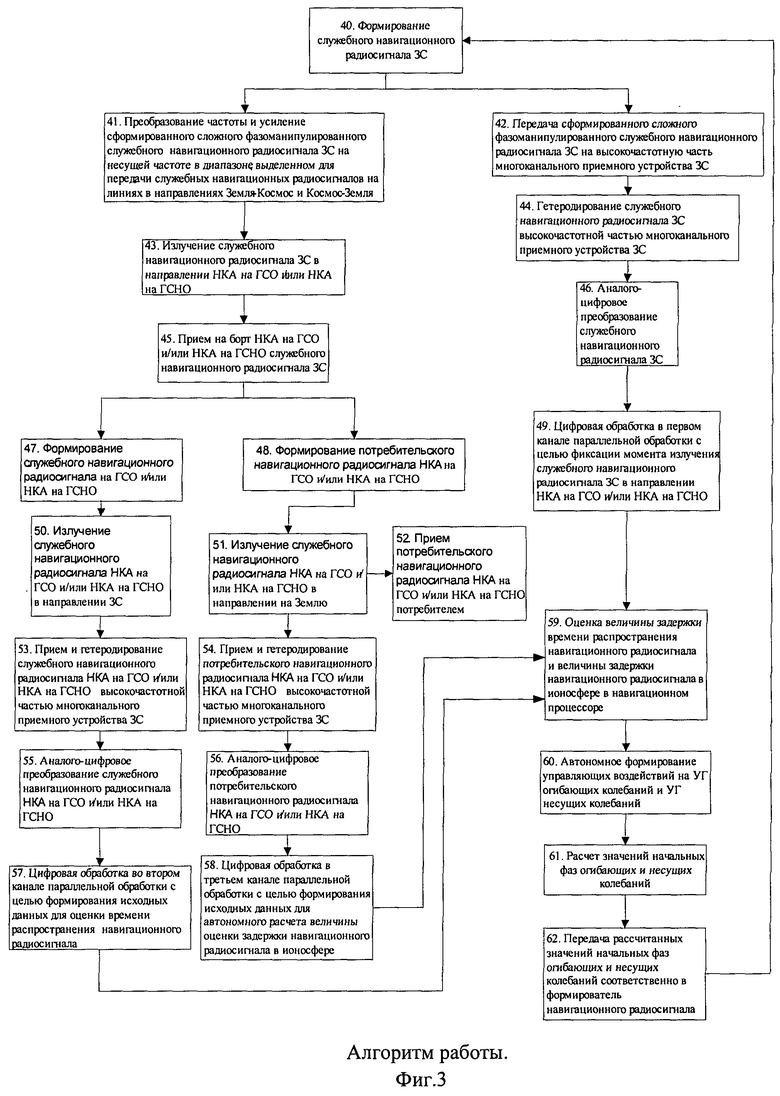
На фиг. 3 - алгоритм работы, где:
40 - формирование служебного навигационного радиосигнала ЗС;
41 - преобразование частоты и усиление сформированного фазоманипулированного служебного навигационного радиосигнала ЗС на несущей частоте в диапазоне, выделенном для передачи служебных навигационных радиосигналов на линиях в направлениях Земля-Космос и Космос-Земля;
42 - передача сформированного фазоманипулированного служебного навигационного радиосигнала ЗС на высокочастотную часть многоканального приемного устройства ЗС;
43 - излучение служебного навигационного радиосигнала ЗС в направлении НКА на ГСО и/или НКА на ГСНО;
44 - гетеродирование служебного навигационного радиосигнала ЗС высокочастотной частью многоканального приемного устройства ЗС;
45 - прием на борт НКА на ГСО и/или НКА на ГСНО служебного навигационного радиосигнала ЗС;
46 - аналого-цифровое преобразование служебного навигационного радиосигнала ЗС;
47 - формирование служебного навигационного радиосигнала на ГСО и/или НКА на ГСНО;
48 - формирование потребительского навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО;
49 - цифровая обработка в первом канале параллельной обработки с целью фиксации момента излучения служебного навигационного радиосигнала ЗС в направлении НКА на ГСО и/или НКА на ГСНО;
50 - излучение служебного навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО в направлении ЗС;
51 - излучение служебного навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО в направлении на Землю;
52 - прием потребительского навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО потребителем;
53 - прием и гетеродирование служебного навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО высокочастотной частью многоканального приемного устройства ЗС;
54 - прием и гетеродирование потребительского навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО высокочастотной частью многоканального приемного устройства ЗС;
55 - аналого-цифровое преобразование служебного навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО;
56 - аналого-цифровое преобразование потребительского навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО;
57 - цифровая обработка во втором канале параллельной обработки с целью формирования исходных данных для оценки времени распространения навигационного радиосигнала;
58 - цифровая обработка в третьем канале параллельной обработки с целью формирования исходных данных для автономного расчета величины оценки задержки навигационного радиосигнала в ионосфере;
59 - оценка величины задержки времени распространения навигационного радиосигнала и величины задержки навигационного радиосигнала в ионосфере в навигационном процессоре;
60 - автономное формирование управляющих воздействий на УГ огибающих колебаний и УГ несущих колебаний;
61 - расчет значений начальных фаз огибающих и несущих колебаний;
62 - передача рассчитанных значений начальных фаз огибающих и несущих колебаний соответственно в формирователь навигационного радиосигнала.
Сущность заявленного изобретения заключается в следующем.
Метод оценки времени распространения и величины ионосферной задержки заключается в следующем.
Для оценки времени распространения радиосигнала τГСНО от ЗС до НКА на ГСО или ГСНО используется модель первичного измерения запросной дальности:

Где -  - геометрическая дальность между НКА с координатами (XНКА, YHKA, ZHKA) и потребителем с координатами (x, y, z);
- геометрическая дальность между НКА с координатами (XНКА, YHKA, ZHKA) и потребителем с координатами (x, y, z);
- δион - задержка распространения навигационного радиосигнала НКА на ГСО или НКА на ГСНО в ионосфере;
- δтроп - задержка распространения навигационного радиосигнала НКА на ГСО или НКА на ГСНО в тропосфере;
- δКА - аппаратурная задержка БРТР;
- δПРМ - аппаратурная задержка навигационного радиосигнала в приемнике;
- eS - шумовые погрешности измерений псевдодальности.
Поскольку связь между ЗС и НКА на ГСО и/или НКА на ГСНО осуществляется в пределах прямой видимости, а среда распространения является изотропной, то использование БРТК без обработки на борту НКА на ГСО и/или НКА на ГСНО позволяет измерить время распространения навигационного радиосигнала τГСНО без учета ионосферной рефракции:

- c - скорость света.
Как следует из выражения (2), для оценки времени распространения помимо первичного измерения запросной дальности SГСНО необходимо оценить величину задержки радиосигнала в ионосфере δион.
Наиболее распространенный метод оценки ионосферной задержки основан на использовании двухчастотных измерений дальности в разных диапазонах частот:

- f1 - значение несущей частоты служебного навигационного радиосигнала;
- f2 - значение несущей частоты потребительского навигационного радиосигнала;
- S1 - первичное измерение псевдодальности на частоте служебного навигационного радиосигнала;
- S2 - первичное измерение псевдодальности на частоте потребительского навигационного радиосигнала;
Таким образом, для оценки ионосферной задержки необходимо использовать измерения по служебному и потребительскому навигационным радиосигналам.
На фиг.1 приведена детальная структурная схема заявленного изобретения. Формирователь навигационного радиосигнала (поз.5) принимает эфемеридно-временную информацию (поз.35) из центра управления системы и сигнал точного времени (поз.36) из центрального синхронизатора системы, сигналы управляемого генератора (УГ) огибающих колебаний (поз.6) и УГ несущих колебаний (поз.7). С выхода формирователя навигационного радиосигнала (поз.5) сформированный сложный фазоманипулированный служебный навигационный радиосигнал на промежуточной частоте поступает на вход блока преобразования частоты и усиления (поз.4), который осуществляет преобразование частоты и усиление навигационного радиосигнала на несущей частоте в диапазоне, выделенном для передачи служебных радиосигналов на линиях в направлениях Земля-Космос и Космос-Земля, а затем с помощью передающего антенно-фидерного устройства ЗС (поз.3) излучается в направлении на НКА на ГСО и/или НКА на ГСНО (поз.2), одновременно с выхода формирователя навигационного радиосигнала (поз.5) передается сформированный сложный фазоманипулированный навигационный радиосигнал на второй вход высокочастотной части многоканального приемного устройства (поз.9), в котором происходит гетеродирование навигационного радиосигнала, с выхода высокочастотной части многоканального приемного устройства (поз.9) поступает на вход аналого-цифрового преобразователя (поз.10), в котором происходит аналого-цифровое преобразование навигационного радиосигнала, далее передается преобразование навигационного радиосигнала в первый канал параллельной (поз.29) обработки для последующей цифровой обработки навигационного радиосигнала. В первом канале параллельной обработки (поз.29) фиксируется момент излучения навигационного радиосигнала в направлении НКА на ГСО и/или НКА на ГСНО (поз.2).
НКА на ГСО и/или НКА на ГСНО (поз.2) формирует из него служебный и потребительский ответные навигационные радиосигналы. Служебный навигационный радиосигнал формируется путем однократного преобразования несущей частоты принятого навигационного радиосигнала с переносом спектра навигационного радиосигнала ЗС на новую несущую частоту в том же частотном диапазоне, что и несущая частота навигационного радиосигнала ЗС, чтобы ЗС могла произвести оценку времени распространения навигационного радиосигнала по формуле (2). Потребительский навигационный радиосигнал формируется путем однократного преобразования несущей частоты принятого навигационного радиосигнала ЗС и переносится в диапазон частот, выделенный для радионавигационной службы в направлении Космос-Земля.
Высокочастотная часть многоканального приемного устройства (поз.9) выполнено с возможностью параллельно осуществлять прием, сопровождение и обработку всех трех навигационных радиосигналов в независимых цифровых каналах. Высокочастотная часть многоканального приемного устройства (поз.9) построена по супергетеродинной схеме и обеспечивает перенос трех навигационных радиосигналов в область низких частот для обеспечения работы аналого-цифрового преобразователя (поз.10), с выхода которого данные в цифровом виде поступают на вход первого (поз.29), второго (поз.30) и третьего канала параллельного обработки (поз.31) навигационных радиосигналов.
Каждый канал параллельной обработки осуществляет слежение за несущими и огибающими колебаниями принимаемых навигационных радиосигналов, что позволяет формировать в навигационном процессоре (поз.25) отсчеты первичных измерений навигационных параметров для оценки времени распространения и величины ионосферной задержки. Поскольку принимаемые навигационные радиосигналы имеют неопределенную начальную фазу, то для слежения используется квадратурная обработка по схеме Костаса. Входной навигационный радиосигнал параллельно умножается на синфазный сигналы управляемого генератора ФАПЧ (поз.24) в первом умножителе (поз.11) и на квадратурный сигнал управляемого генератора ФАПЧ (поз.24) во втором умножителе (поз.12). Сигнал с выхода второго умножителя (поз.12) поступает на первые входы четвертого (поз.14), шестого (поз.18) и седьмого умножителей (поз.20) соответственно. Сигнал с выхода первого умножителя (поз.11) поступает на первый входа третьего умножителя (поз.13). На вторые входы третьего (поз.13) и четвертого умножителей (поз.14) поступает копия входного сигнала, сформированная УГ ССЗ (поз.23). На вторые входы шестого (поз.18) и седьмого умножителей (поз.20) поступает соответственно опережающая и отстающая копии входного сигнала, сформированные УГ ССЗ (поз.23). Сигналы с выходов третьего (поз.13), четвертого (поз.14), шестого (поз.18) и седьмого умножителей (поз.20) поступают на вход первого (поз.15), второго (поз.16), третьего (поз.19) и четвертого накопительных сумматоров (поз.21) соответственно. Накопительные сумматоры выполняют функцию цифровых фильтров низких частот. Отфильтрованные сигналы с выходов первого (поз.15) и второго накопительных сумматоров (поз.16) поступают на первый и второй входы пятого умножителя (поз.17) соответственно. Управляющий сигнал с выхода пятого умножителя (поз.17) поступает на вход УГ ФАПЧ (поз.24). Отфильтрованные сигналы с выхода третьего (поз.19) и четвертого накопительных сумматоров (поз.21) поступают на первый и второй входы восьмого умножителя (поз.22) соответственно. Управляющий сигнал с выхода восьмого умножителя поступает на вход УГ ССЗ (поз.23).С третьего выхода УГ ФАПЧ (поз.24) первого, второго и третьего каналов параллельной обработки на первый, восьмой и девятый входы навигационного процессора (поз.25) поступают информационные сигналы с данными о фазе сигнала УГ ФАПЧ (поз.24) первого, второго и третьего каналов параллельной обработки соответственно. С четвертого выхода УГ ССЗ (поз.23) первого, второго и третьего каналов параллельной обработки на второй, четвертый и пятый входы навигационного процессора (поз.25) поступают информационные сигналы с данными о фазе сигнала УГ ССЗ (поз.23) первого, второго и третьего каналов параллельной обработки соответственно. С выхода первого накопительного сумматора (поз.15) первого, второго и третьего каналов параллельной обработки на третий, шестой и седьмой входы навигационного процессора (поз.25) поступает информационный сигнал с цифровой информацией, заложенной формирователем навигационного радиосигнала (поз.5). На основании полученной информации навигационный процессор (поз.25) оценивает величины задержки времени распространения согласно формуле (2), величины задержки навигационного радиосигнала в ионосфере согласно формуле (3). Полученные оценки величин задержки времени распространения и задержки в ионосфере с выхода навигационного процессора (поз.25) поступают на входы УГ огибающих колебаний и УГ несущих колебаний. Сигналы с выходов УГ несущих колебаний (поз.7) и УГ огибающих колебаний (поз.6) поступают на третий и четвертый входы формирователя навигационного радиосигнала (поз.5).
При использовании метода прямой ретрансляции (см. фиг.2 и фиг.3) происходит размещение орбитальной группировки навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или НКА на геосинхронной наклонной орбите (ГСНО). Размещение земных станций (ЗС) по числу НКА на ГСО и/или НКА на ГСНО, принимающих эфемеридно-временныю информацию (ЭВМ) из центра управления системы (ЦУС) и сигнала точного времени из центрального синхронизатора системы, каждая ЗС осуществляет формирование служебного навигационного радиосигнала ЗС путем модуляции несущих колебаний двоичными символами периодической дальномерной псевдослучайной последовательности (ПСП) и сложение по модулю два с символами эфемеридно-временной информации.
Полученный фазоманипулированный служебный навигационный радиосигнал излучается в направлении НКА на ГСО и/или НКА на ГСНО. Для оценки полного времени распространения бортовой радиотехнический ретранслятор (БРТР) должен осуществить формирование служебного навигационного радиосигнал НКА на ГСО и/или НКА на ГСНО путем однократного преобразования несущей частоты принятого служебного навигационного радиосигнала ЗС с переносом спектра служебного навигационного радиосигнала ЗС на новую несущую частоту в том же частотном диапазоне, что и несущая частота служебного навигационного радиосигнала ЗС, потребительского навигационного радиосигнала НКА на ГСО и/или НКА на ГСНО путем однократного преобразования несущей частоты принятого служебного навигационного радиосигнала ЗС и переносит в диапазон частот, выделенный для радионавигационной службы в направлении Космос-Земля, усилить и излучить их в обратном направлении.
Схема (см фиг.2б) является распределенной системой косвенного формирования навигационного радиосигнала, в которой детектор (поз.33), управляемый генератор (поз.34) располагаются на земле, а бортовой радиотехнический комплексом (БРТК) с преобразованием частоты (поз.32) - на борту НКА (поз.2).
Формирования навигационного радиосигнала являются наличием случайно-неоднородной среды распространения навигационных радиосигналов между элементами системы, поэтому при разработке архитектуры и параметров системы необходимо учитывать следующие обстоятельства:
- навигационные радиосигналы на радиолиниях Земля - Космос и Космос - Земля проходят через ионосферу, которая характеризуется различными значениями фазовой и групповой скоростей распространения навигационных радиосигналов, что приводит к нарушению взаимной синхронизации несущих колебаний и огибающей, при этом фаза несущих колебаний опережает фазу огибающей;
- тропосферная и ионосферная рефракция приводят к флуктуациям фазы навигационных радиосигналов, которые возрастают с ростом значения частоты несущих колебаний, а также зависят от гидрометеорологических условий.
С учетом сказанного для обеспечения когерентности фазы дальномерной псевдослучайной последовательности (ПСП) и фазы несущих колебаний потребительского навигационного радиосигнала, излучаемого с борта НКА на ГСО и/или НКА на ГСНО, при формировании навигационного радиосигнала в ЗС необходимо учитывать доплеровский сдвиг частоты, задержки на распространение и в аппаратуре БРТР с преобразованием частоты и ЗС, а также влияние ионосферной рефракции. Оценить общую задержку на распространение можно запросным измерением дальности в одном частотном диапазоне с помощью служебных навигационных радиосигналов, а величину задержки, вызванной ионосферной рефракцией, - двухчастотным методом [1], используя при этом служебный и потребительский навигационные радиосигналы на радиолинии НКА на ГСО и/или НКА на ГСНО - ЗС. Поэтому в БРТР с преобразованием частоты из принятого навигационного радиосигнала должно быть сформировано два навигационных радиосигнала - один служебный, второй потребительский. Служебный сигнал должен иметь несущую частоту в том же диапазоне, что и навигационный радиосигнал ЗС, поскольку в этом случае спектр флуктуации фазы сигнала не превышает десятков герц [2], а процесс переноса пространственного распределения поля неоднородностей предполагается стационарным [3], что позволит приемнику ЗС оценить величину запаздывания навигационного сигнала в радиолинии. Потребительский навигационный радиосигнал совместно со служебным на радиолинии НКА на ГСО и/или НКА на ГСНО - ЗС используется для расчета величины ионосферной задержки. Полученные в результате оценки величины задержки времени распространения и задержки в ионосфере навигационного радиосигнала используются ЗС (поз.1) для расчета начальных фаз огибающих и несущих колебаний. ЗС (поз.1) формирует навигационный радиосигнал с использованием рассчитанных начальных фаз и излучает его на НКА на ГСО и/или НКА на ГСНО, начальные фазы огибающих и несущих колебаний рассчитаны таким образом, чтобы радиосигнал на радиолиниях Земля - Космос и Космос - Земля, проходя через ионосферу, приводил к взаимной синхронизации несущих и огибающих колебаний.
В соответствии с рекомендациям RTCA [4] для обеспечения унификации навигационной аппаратуры потребителя, способной принимать навигационные радиосигналы НКА ГЛОНАСС и/или GPS, а также НКА на ГСО и/или НКА на ГСНО, БРТК с преобразованием частоты должен обеспечить излучение потребительского навигационного радиосигнала с шириной спектра 22 МГц на одной из используемых в настоящее время частот в L-диапазоне. В соответствии с Регламентом радиосвязи [5] для излучения подобных служебных широкополосных навигационных радиосигналов на радиолинии ЗС-НКА можно использовать частоты в С- и Ku-диапазонах.
Таким образом, заявленная система обеспечивает гарантированное формирование дальномерного сигнала даже при отсутствии эфемридно-временной информации из центра управления системы.
Применение заявленной системы позволяет упростить бортовую аппаратуру НКА, поскольку процесс формирования навигационного радиосигнала переносится на землю, что введет к уменьшению энергопотребления и массы (габаритов) бортовой аппаратуры НКА, что в настоящее время актуально.
Источники информации
1. Elliott D. Kaplan. Understanding GPS. Principles and Applications. - London: Artech House, 1996. - 555 c.
2. Татарский В.И. Распространение волн в турбулентной атмосфере. - М.: Наука, 1967. - 548 с.
3. Тюбалин В.В. Ошибка синхронизации разнесенных генераторов, обусловленная нестабильностью радиолинии. - М.: РКтехника, сер.VI, выпуск IV (18), 1974. - стр.163-166.
4. Minimum Operational Performance Standards for Global Positioning/Wide Area Augmentation System Airborne Equipment, RTCA/DO-229D, prepared by SC-159, RTCA Inc., Washington, D.C., December 13, 2006.
5. Регламент радиосвязи. T.1. - Международный союз электросвязи, 2008. - 428 с.
Изобретение относится к области радиотехники, а именно к системам спутникового наземного позиционирования, и может быть использовано для определения местоположения и навигации потребителя. Технический результат заключается в повышении надежности работы системы за счет автономной оценки задержки, вызванной ионосферной рефракцией, в земной станции (без дополнительных источников информации). Для этого система состоит из орбитальной группировки навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или НКА на геосинхронной наклонной орбите (ГСНО) и земных станций (ЗС) по числу НКА на ГСО и/или НКА на ГСНО, при этом каждый НКА содержит делитель, состоящий из приемного антенно-фидерного устройства (АФУ) НКА, бортового радиотехнического ретранслятора (БРТР) и передающего АФУ НКА, а каждая ЗС состоит из детектора, управляемого генератора (УГ), состоящего из передающего АФУ ЗС, блока преобразования частоты и усиления, формирователя навигационных радиосигналов, УГ огибающих колебаний, УГ несущих колебаний, причем детектор состоит из приемного АФУ ЗС, высокочастотной части многоканального приемного устройства, АЦП, навигационного процессора, каналов параллельной обработки, каждый из которых состоит из умножителей, накопительных сумматоров, УГ схемы слежения за задержкой (УГ ССЗ), УГ системы фазовой автоподстройки частоты (УГ ФАПЧ). 2 н.п. ф-лы, 3 ил.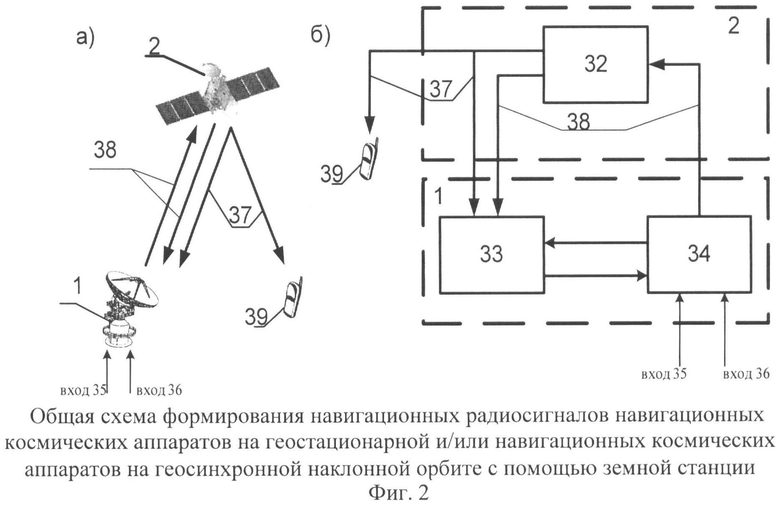
1. Система формирования навигационных радиосигналов навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или навигационных космических аппаратов (НКА) на геосинхронной наклонной орбите (ГСНО) с помощью земных станций (ЗС), состоящая из орбитальной группировки НКА на ГСО и/или НКА на ГСНО и ЗС по числу НКА на ГСО и/или НКА на ГСНО, при этом НКА на ГСО и/или НКА на ГСНО соединены по каналам связи с ЗС, каждый НКА на ГСО и/или НКА на ГСНО включает в себя делитель, состоящий из последовательно соединенных приемного антенно-фидерного устройства (АФУ), бортового радиотехнического ретранслятора (БРТР) и передающего АФУ соответственно, а каждая ЗС состоит из детектора, управляемого генератора, состоящего из передающего АФУ ЗС, блока преобразования частоты и усиления, формирователя навигационных радиосигналов, управляемого генератора (УГ) огибающих колебаний, УГ несущих колебаний, детектор состоит из приемного АФУ ЗС, высокочастотной части многоканального приемного устройства, аналого-цифрового преобразователя, навигационного процессора, первого, второго и третьего каналов параллельной обработки, при этом каждый канал параллельной обработки состоит из первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого умножителей, первого, второго, третьего и четвертого накопительных сумматоров, управляемого генератора схемы слежения за задержкой (УГ ССЗ), управляемого генератора системы фазовой автоподстройки частоты (УГ ФАПЧ), при этом на первый вход формирователя навигационных радиосигналов поступает эфемеридно-временная информация (ЭВИ), на второй вход формирователя навигационных радиосигналов поступает сигнал точного времени, выход формирователя навигационных радиосигналов соединен с входом блока преобразования частоты и усиления и со вторым входом высокочастотной части многоканального приемного устройства, выход блока преобразования частоты и усиления соединен с входом передающего АФУ ЗС, выход приемного АФУ ЗС соединен с первым входом высокочастотной части многоканального приемного устройства, выход которого подключен к входу аналого-цифрового преобразователя, выход аналого-цифрового преобразователя соединен с первыми входами первого и второго умножителей первого, второго и третьего каналов параллельной обработки соответственно, выход второго умножителя соединен с первыми входами четвертого, шестого и седьмого умножителей, выход четвертого умножителя подключен к входу второго накопительного сумматора, выход второго накопительного сумматора соединен с первым входом пятого умножителя, выход первого умножителя соединен с первым входом третьего умножителя, выход третьего умножителя подключен к входу первого накопительного сумматора, выход первого накопительного сумматора соединен со вторым входом пятого умножителя, выход первого накопительного сумматора первого, второго и третьего каналов параллельной обработки соединен с третьим, шестым и седьмым входами навигационного процессора соответственно, выход шестого умножителя соединен с входом третьего накопительного сумматора, выход третьего накопительного сумматора подключен ко второму входу восьмого умножителя, выход седьмого умножителя соединен с входом четвертого накопительного сумматора, выход четвертого накопительного сумматора подключен к первому входу восьмого умножителя, выход восьмого умножителя соединен с входом УГ ССЗ, первый выход УГ ССЗ соединен со вторыми входами третьего и четвертого умножителя, второй и третий выход УГ ССЗ соединены со вторыми входами седьмого и шестого умножителей соответственно, четвертый выход УГ ССЗ первого, второго и третьего каналов параллельной обработки соединен со вторым, четвертым и пятым входом навигационного процессора соответственно, выход пятого умножителя соединен с входом УГ ФАПЧ, первый и второй выходы УГ ФАПЧ соединены со вторыми входами второго и первого умножителей соответственно, третий выход УГ ФАПЧ первого, второго и третьего каналов параллельной обработки соединен с первым, восьмым и девятым входами навигационного процессора соответственно, выход навигационного процессора соединен с входами УГ огибающих колебаний и УГ несущих колебаний, выходы УГ несущих колебаний и УГ огибающих колебаний соединены с третьим и четвертым входами формирователя навигационных радиосигналов соответственно.
2. Способ формирования навигационных радиосигналов навигационных космических аппаратов (НКА) на геостационарной орбите (ГСО) и/или навигационных космических аппаратов (НКА) на геосинхронной наклонной орбите (ГСНО) с помощью земных станций (ЗС), заключающийся в том, что:
- дополняют навигационную спутниковую систему орбитальной группировкой НКА на ГСО и/или НКА на ГСНО;
- размещают ЗС по числу НКА на ГСО и/или НКА на ГСНО, принимающие эфемеридно-временную информацию (ЭВМ) из центра управления системой (ЦУС) и сигнал точного времени из центрального синхронизатора системы, при этом каждая ЗС осуществляет формирование служебного навигационного радиосигнала путем модуляции несущих колебаний двоичными символами периодической дальномерной псевдослучайной последовательности (ПСП) и сложение по модулю два с символами эфемеридно-временной информации;
- ЗС излучает фазоманипулированный служебный навигационный радиосигнал в направлении НКА на ГСО и/или НКА на ГСНО и фиксирует момент излучения служебного навигационного радиосигнала в направлении НКА на ГСО и/или НКА на ГСНО,
- НКА на ГСО и/или НКА на ГСНО формирует служебный навигационный радиосигнал путем однократного преобразования несущей частоты принятого служебного навигационного радиосигнала ЗС с переносом спектра служебного навигационного радиосигнала ЗС на новую несущую частоту в том же частотном диапазоне, что и несущая частота служебного навигационного радиосигнала ЗС;
- НКА на ГСО и/или НКА на ГСНО формирует потребительский навигационный радиосигнал путем однократного преобразования несущей частоты принятого служебного навигационного радиосигнала ЗС и переносит в диапазон частот, выделенный для радионавигационной службы в направлении Космос-Земля и излучает его потребителю;
- НКА на ГСО и/или НКА на ГСНО излучает потребительский и служебный навигационные радиосигналы на ЗС для оценки времени распространения навигационных радиосигналов и расчета величины ионосферной задержки;
- ЗС вычисляет оценку времени распространения навигационных радиосигналов с использованием данных о моменте излучения служебного навигационного радиосигнала в направлении НКА на ГСО и/или НКА на ГСНО по формуле:

где SГСНО - запросное измерение дальности по служебному навигационному радиосигналу;
δКА - аппаратурная задержка бортового радиотехнического ретранслятора (БРТР);
δПРМ - аппаратурная задержка навигационного радиосигнала в приемнике;
δИОН - задержка распространения сигнала НКА на ГСО или НКА на ГСНО в ионосфере;
с - скорость света;
- ЗС автономно рассчитывает величину ионосферной задержки по значениям несущих частот и первичным псевдодальностям служебного и потребительского навигационных радиосигналов по формуле:
где f1 - значение несущей частоты служебного навигационного радиосигнала;
f2 - значение несущей частоты потребительского навигационного радиосигнала;
S1 - первичное измерение псевдодальности на частоте служебного навигационного радиосигнала;
S2 - первичное измерение псевдодальности на частоте потребительского навигационного радиосигнала;
- полученные в результате оценки величины задержки времени распространения и задержки в ионосфере навигационного радиосигнала используются ЗС для расчета начальных фаз огибающих и несущих колебаний;
- ЗС формирует навигационный радиосигнал с использованием рассчитанных начальных фаз и излучает его на НКА на ГСО и/или НКА на ГСНО, при этом начальные фазы огибающих и несущих колебаний рассчитаны таким образом, что радиосигнал на радиолиниях Земля-Космос и Космос-Земля, проходя через ионосферу, приводил к взаимной синхронизации несущих и огибающих колебаний.
| US 7532161 В2, 12.05.2009 | |||
| СПОСОБ И СИСТЕМА НАВИГАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ, ИСПОЛЬЗУЮЩИЕ ТРИ НЕСУЩИХ РАДИОСИГНАЛА, ПЕРЕДАВАЕМЫХ СПУТНИКОМ, И ИОНОСФЕРНЫЕ КОРРЕКЦИИ | 2003 |
|
RU2318222C2 |
| ОЦЕНКА НЕОДНОЗНАЧНОСТИ СИГНАЛОВ GNSS ДЛЯ ТРЕХ ИЛИ БОЛЕЕ НЕСУЩИХ | 2004 |
|
RU2374660C2 |
| WO 2011100690 А2, 18.08.2011 | |||
| US 6407700 В1, 18.06.2002. | |||

