Изобретение относится к машиностроению и может быть использовано в качестве привода автомобиля, тягача, робота и т.д.
Всемирно известен автомобиль, который состоит из несущей рамы, колес и трансмиссии, как совокупности механизмов и агрегатов для передачи крутящего момента от двигателя к ведущим колесам автомобиля. Трансмиссия предназначена для изменения величины крутящего момента, а также для изменения направления движения. Если мы имеем переднеприводный автомобиль, то крутящий момент от мотора к колесам передается на передние колеса, если заднеприводный - то на задние колеса. Также выпускаются автомашины с четырьмя ведущими колесами.
Недостатком такой конструкции является то, что она ограничена в маневренности и возможностях перемещения по пересеченной местности.
Известна двигательная система для автомобиля по международному патенту № WO 0206063 А1 (опубл. 24.01.2002), состоящая из двух или более колес, выполненных в виде соосных полусферических сегментов одного радиуса с возможностью их свободного вращения независимо друг от друга. Каждое полусферическое колесо установлено на два, взаимно перпендикулярных вала, которые снабжены приводами: одним для вращения колеса, другим для контролируемого поворота последнего. Данная трансмиссия позволяет менять радиус контакта с поверхностью, по которой перемещается двигательная система и соответственно менять скорость движения. Это позволяет иметь дополнительную возможность регулировки скорости и силы отталкивания от грунта, по которому перемещается двигательная система.
Недостатком данной конструкции является отсутствие возможности полной остановки двигательной системы при работающих приводах вращения полусфер. Такая возможность позволила бы накапливать кинетическую энергию перед началом движения.
Наиболее близким по конструкции и функциональным возможностям является сферомобиль по заявке РФ №2013131288 (опубл. 20.01.2015). Он состоит из несущей рамы и не менее двух или более колес, состоящих из двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой - малый - установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси, причем только усеченный сегмент снабжен приводом для приведения во вращение последнего на малом сегменте вокруг их общей оси в любом положении колеса, колеса установлены в вилки на ось перпендикулярно оси их вращения, ось снабжена приводом для контролируемого поворота колес вокруг нее, причем контролируемый поворот колес возможен, как одновременно на всех колесах, так и на отдельных колесах в обе стороны от вертикального положения с возможностью фиксированной остановки. Такая конструкция сферомобиля позволяет накапливать кинетическую энергию вращения колес, переведенных в вертикальное положение осями, за счет конструкции колеса, состоящего из двух сегментов, соединенных между собой осью с возможностью свободного вращения относительно друг друга. Это позволяет разгружать приводы при пусках или совсем их не отключать при кратковременной остановке или изменении направления движения.
Как показала практика эксплуатации вышеописанной конструкции, часто возникает необходимость перемещаться поступательно или перпендикулярно основному курсу. Недостатком данной конструкции является отсутствие такой возможности.
Предлагаемым изобретением решается задача расширения технических возможностей транспортного средства, его трансмиссии и возможности более широкого применения данной трансмиссии, как в робототехнике, так и на транспорте вообще.
Для достижения этого технического результата в сферомобиле, состоящем из несущей рамы с закрепленными на ней вилками, в которых установлены не менее двух или более колес, состоящих из двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой - малый - установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси, причем только усеченный сегмент снабжен приводом для приведения во вращение последнего на малом сегменте вокруг их общей оси в любом положении колеса, колеса установлены в вилки на ось перпендикулярно оси их вращения, ось снабжена приводом для контролируемого поворота колес вокруг нее, причем контролируемый поворот колес возможен, как одновременно на всех колесах, так и на отдельных колесах в обе стороны от вертикального положения с возможностью фиксированной остановки, при этом колеса снабжены дополнительной вилкой и выполнены в виде блоков, включающих две вилки - дополнительную и основную; одна в другой, соединенных между собой осью с возможностью контролируемого поворота и фиксированной остановки основной вилки в обе стороны приводом, установленным на дополнительной вилке; причем контролируемый поворот основной вилки возможен, как одновременно на всех блоках колес, так и на отдельных блоках, а оси, вокруг которых возможен поворот колес и основной вилки выполнены проходящими через центр сферических сегментов.
Отличительными признаками предлагаемого сферомобиля является то, что колеса снабжены дополнительной вилкой и выполнены в виде блоков, включающих две вилки - дополнительную и основную; одна в другой, соединенных между собой осью с возможностью контролируемого поворота и фиксированной остановки основной вилки в обе стороны приводом, установленным на дополнительную вилку; причем контролируемый поворот основной вилки возможен, как одновременно на всех блоках колес, так и на отдельных блоках, а оси, вокруг которых возможен поворот колес и основной вилки выполнены проходящими через центр сферических сегментов.
Наличие отличительных признаков позволяет сферомобилю двигаться в любом направлении - поступательно, не изменяя положения корпуса, а также двигаться, как и при обычной трансмиссии. Например, сферомобиль может объезжать объекты под прямым углом, перемещаться к объекту, находящемуся справа, слева или сзади без осуществления дополнительного разворота, т.е. может двигаться по прямой, соединяющей сферомобиль и данный объект. Это значительно повышает маневренность сферомобиля.
Вариант предлагаемого сферомобиля иллюстрируется чертежами, представленными на фиг. 1-8.
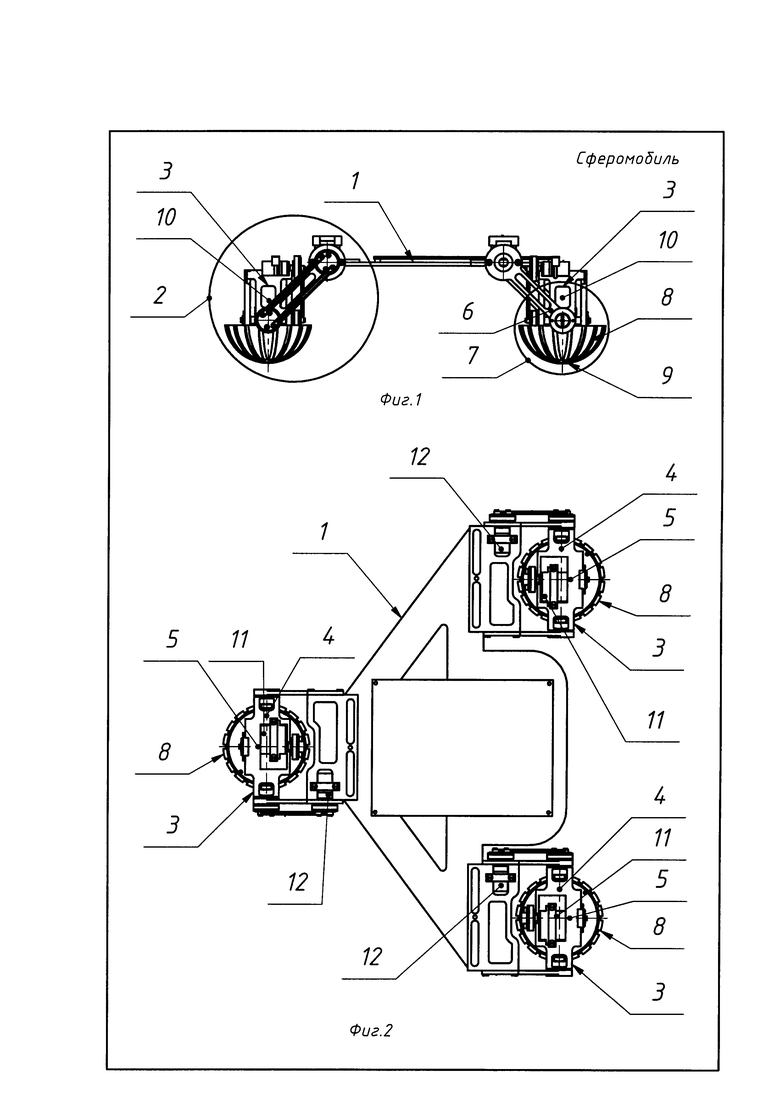
На фиг. 1 - вид сферомобиля сбоку с тремя блоками колес (положение колес при остановке - горизонтальное);
на фиг. 2 - то же, вид сверху;
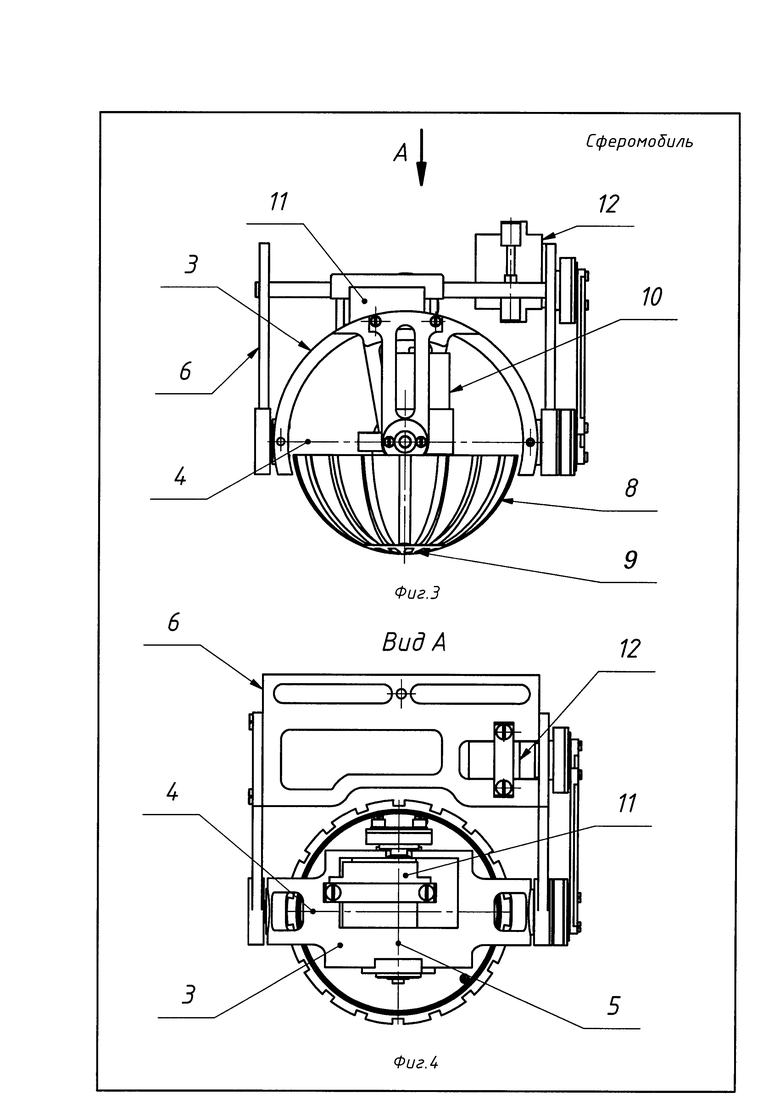
на фиг. 3 - вид блока колес спереди (положение колес - горизонтальное);
на фиг. 4 - вид блока колес сверху;
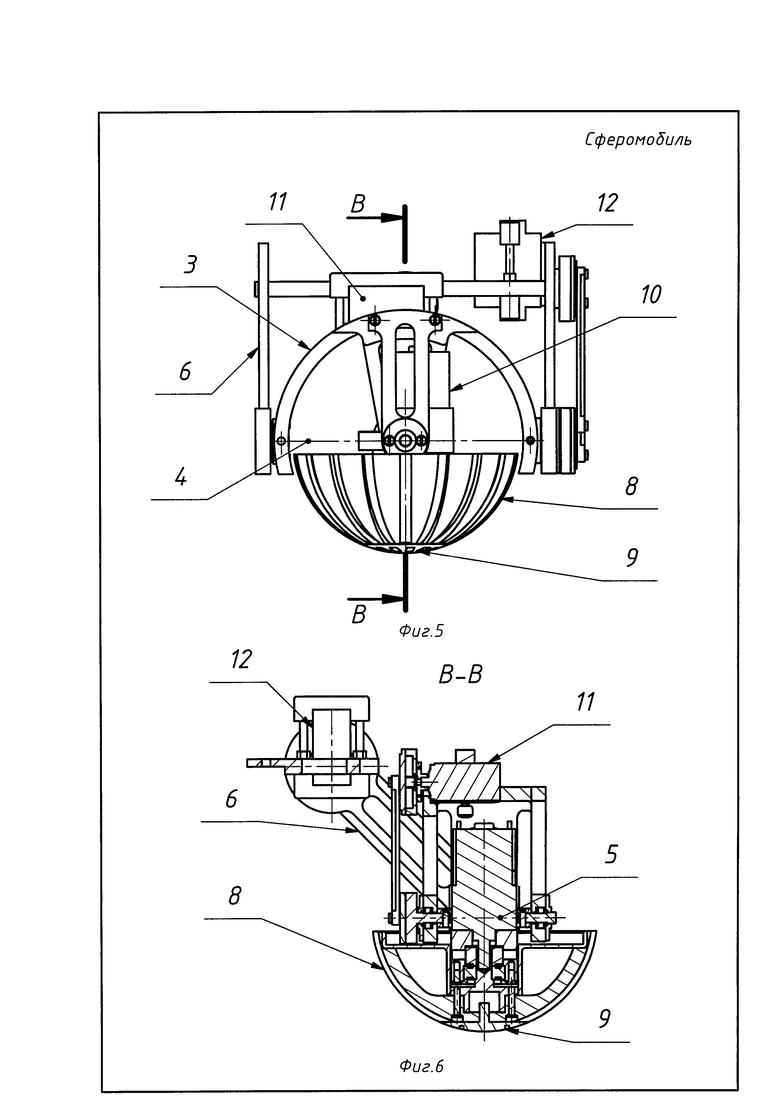
на фиг. 5 - фронтальный вид блока колес;
на фиг. 6 - разрез по В-В;
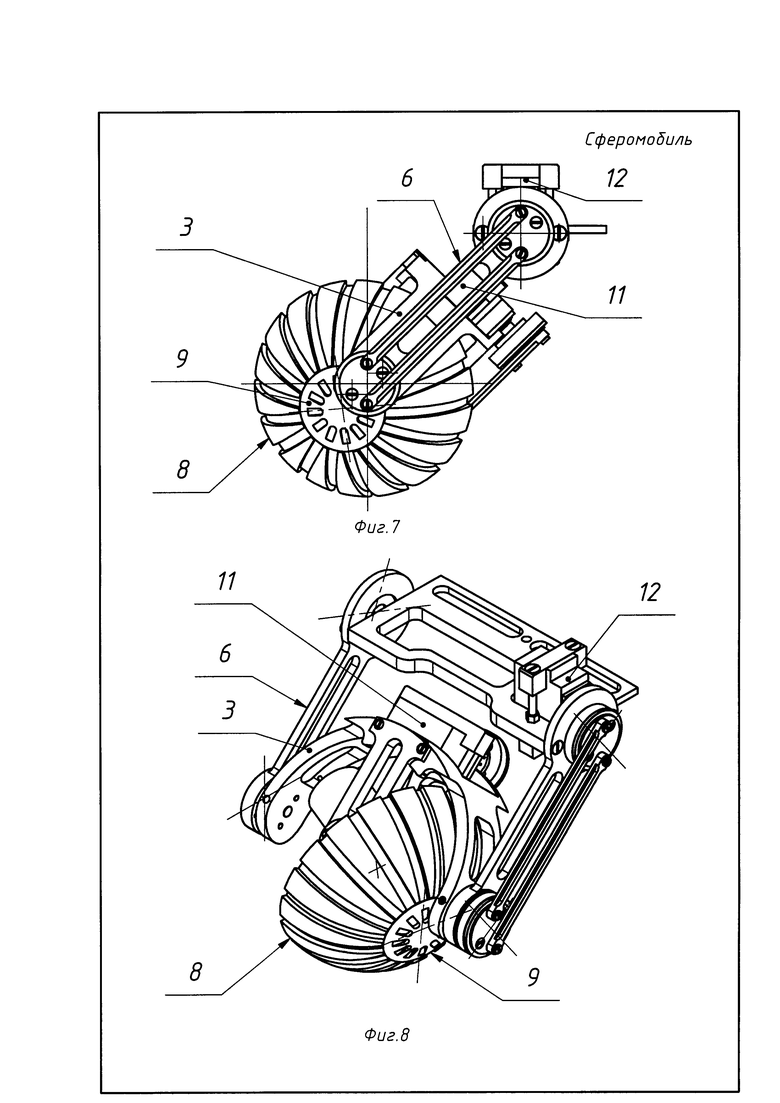
на фиг. 7 - вид блока колес сбоку (максимальный поворот вокруг двух осей);
на фиг. 8 - то же, вид в изометрии.
Вариант исполнения предлагаемого транспортного средства с тремя блоками представлен в виде модели (фиг. 1-8). Сферомобиль состоит (фиг. 1-2) из несущей рамы 1 и трех блоков колес 2. Блок 2 состоит из основной вилки 3 с взаимно перпендикулярными осями 4-5 (фиг. 3-8), дополнительной вилки 6, колеса 7, состоящего из усеченного сегмента 8 и малого сегмента 9, привода 10, привода контролируемого поворота колеса 11, привода контролируемого поворота вилки 12.
Сферомобиль работает следующим образом. Начало движения сферомобиля в любую сторону осуществляется путем поворота оси вращения полусферических колес 7 (фиг. 1), состоящих из усеченных сегментов 8-9 вокруг осей 4-5.
Для движения вперед с определенной скоростью производится одновременный поворот полусферических колес 7 вокруг оси 5 приводом 12. Сферомобиль начнет перемещаться вперед со скоростью, определенной радиусом контакта полусферического колеса 7 с поверхностью, по которой он движется. Величина скорости зависит от угла наклона оси вращения колеса 7, приводящегося во вращение приводом 10. Для движения сферомобиля назад производится одновременный наклон оси вращения колес 7 вокруг той же оси 5 в противоположную сторону от вертикального положения оси вращения колеса 7 приводом 10. Для снижения энергетических затрат при переходе через вертикальное положение оси вращения колеса 7 приводом 10, последнее снабжено сегментом 9, который может свободно вращаться на оси колеса 7. Таким образом, в вертикальном положении сегмент 8 колеса 7 вращается приводом 10 на сегменте 9, не взаимодействуя с поверхностью, по которой движется сферомобиль. Из этого положения, не останавливая вращение привода 10 и не меняя его направления вращения, можно осуществлять движение сферомобиля вперед и назад при одновременном наклоне осей вращения всех колес 7 вокруг осей 5 приводами 11.
Для движения сферомобиля перпендикулярно или под любым другим углом к вышеописанному основному движению производится одновременный наклон оси вращения колес 7 вокруг осей 4 приводами 11. Сферомобиль будет двигаться перпендикулярно или под любым другим углом к основному движению со скоростью, также соответствующей радиусу контакта сферического колеса 7 с поверхностью, по которой он движется. Величина скорости также зависит от угла наклона оси вращения колеса 7 вокруг оси 4. Для движения сферомобиля в противоположную сторону, как и описывалось выше, не останавливая вращение привода 10 и не меняя его направления вращения, производится одновременный наклон основной вилки 3 всех колес 7 в противоположную сторону вокруг оси 4.
Совмещая наклоны осей вращения колес 7 вокруг осей 4-5, сферомобиль будет двигаться, изменяя направление движения как поступательно (не меняя положения несущей рамы 1 (фиг. 1-2)), так и с возможностью поворота несущей рамы 1 в плоскости движения последней.
Возможности перемещения данной конструкции в плане маневренности неограниченны. Сферомобиль может двигаться в плоскости как угодно: с одновременным вращением несущей рамы 1, изменением направления движения на девяносто градусов к основному курсу или на любой другой угол. Все зависит от управления наклонами осей вращения колес 7 вокруг осей 4-5 приводами 11-12.
Наиболее важное применение данной трансмиссии - это робототехника, где маневровые возможности наиболее востребованы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СФЕРОМОБИЛЬ | 2013 |
|
RU2554905C2 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ (RVT) С ПОВЫШЕННОЙ УДЕЛЬНОЙ МОЩНОСТЬЮ | 2013 |
|
RU2654431C2 |
| МАЛОГАБАРИТНЫЙ ТРАКТОР | 2013 |
|
RU2528502C1 |
| МАЛОГАБАРИТНЫЙ ТРАКТОР | 2013 |
|
RU2528518C1 |
| МАЛОГАБАРИТНЫЙ ТРАКТОР | 2013 |
|
RU2528524C1 |
| КАРУСЕЛЬ ДЛЯ ПАРКОВ РАЗВЛЕЧЕНИЙ С ДВОЙНЫМ ПРИВОДОМ | 2018 |
|
RU2763008C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2137167C1 |
| ТРЕХКОЛЕСНЫЙ ВЕЛОСИПЕД | 2004 |
|
RU2259300C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ УБРАННОЙ МАССЫ ДЛЯ ПОЛУЧЕНИЯ СИЛОСА | 2007 |
|
RU2413409C2 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
Изобретение относится к машиностроению и может быть использовано в качестве привода автомобиля, тягача, робота и т.д. Сферомобиль состоит из несущей рамы, и не менее двух или более колес, состоящих из двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой - малый - установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси. Усеченный сегмент снабжен приводом для приведения во вращение последнего на малом сегменте вокруг их общей оси. Колеса установлены в основные вилки на ось перпендикулярно оси их вращения, а вилки закреплены на несущей раме. Ось снабжена приводом для поворота колес вокруг нее. Колеса снабжены дополнительной вилкой и выполнены в виде отдельных блоков, включающих две вилки - дополнительную и основную, соединенных между собой осью с возможностью поворота и фиксированной остановки основной вилки в обе стороны приводом, установленным на дополнительную вилку. Контролируемый поворот основной вилки возможен, как одновременно на всех блоках колес, так и на отдельных блоках. Технический результат - расширение технических возможностей транспортного средства, его трансмиссии и возможности более широкого применения данной трансмиссии, как в робототехнике, так и на транспорте. 8 ил.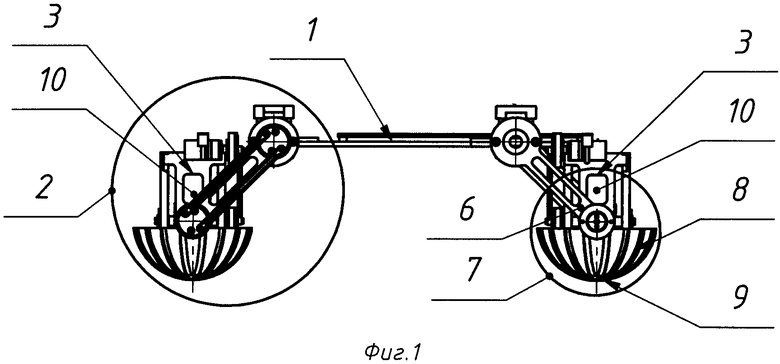
Сферомобиль, состоящий из несущей рамы с закрепленными на ней вилками, в которых установлены не менее двух или более колес, состоящих из двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой - малый - установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси, причем только усеченный сегмент снабжен приводом для приведения во вращение последнего на малом сегменте вокруг их общей оси в любом положении колеса, колеса установлены в вилки на ось перпендикулярно оси их вращения, ось снабжена приводом для контролируемого поворота колес вокруг нее, причем контролируемый поворот колес возможен, как одновременно на всех колесах, так и на отдельных колесах в обе стороны от вертикального положения с возможностью фиксированной остановки, отличающийся тем, что колеса снабжены дополнительной вилкой и выполнены в виде блоков, включающих две вилки - дополнительную и основную, одна в другой, соединённых между собой осью с возможностью контролируемого поворота и фиксированной остановки основной вилки в обе стороны приводом, установленным на дополнительной вилке, причем контролируемый поворот основной вилки возможен, как одновременно на всех блоках колес, так и на отдельных блоках, а оси, вокруг которых возможен поворот колес и основной вилки, выполнены проходящими через центр сферических сегментов.
| СФЕРОМОБИЛЬ | 2013 |
|
RU2554905C2 |
| КЛЕЩЕВОЙ ЗАХВАТ | 0 |
|
SU206063A1 |
| JP 2000142154 A, 23.05.2000 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ СВЯЗИ С СИСТЕМЫ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ НА АЛЬТЕРНАТИВНУЮ СИСТЕМУ С ПОМОЩЬЮ МОБИЛЬНОГО БЛОКА | 1996 |
|
RU2172558C2 |

