Область техники, к которой относится изобретение
Настоящее изобретение относится к карусели для парков развлечений, выполненной с возможностью вмещения одного или более пассажиров в движущемся окружении, например, в закрытом корпусе.
Уровень техники
Карусель для парков развлечений, относящаяся к вышеупомянутому типу, описана в европейском патенте EP 1875949, оформленном на имя того же заявителя.
Такая карусель содержит сферический корпус, который может вмещать одного или более пассажиров, надежно зафиксированных в упомянутом корпусе посредством соответствующих сидений или других поддерживающих средств.
Сферический корпус опирается на множество вращающихся тел, связанных с опорной рамой и распределенных вокруг упомянутого корпуса таким образом, чтобы предотвращать любое его поступательное перемещение.
Каждое из этих вращающихся тел выполнено с возможностью вращаться вокруг по меньшей мере двух соответствующих осей вращения, которыми являются ось поворота, проходящая через геометрический центр сферического корпуса, и ось качения, перпендикулярная упомянутой оси поворота.
Таким образом, сферический корпус может вращаться относительно опорной рамы вокруг бесконечного количества осей вращения, проходящих через его геометрический центр, который всегда остается неподвижным.
Чтобы передать эти вращения сферическому корпусу, с одним из вышеупомянутых вращающихся тел связан соответствующие двигательные средства, выполненные с возможностью активного приведения упомянутого вращающегося тела во вращение как вокруг его собственной оси поворота, так и вокруг его собственной оси качения, в то время как все другие вращающиеся тела являются неприводными и просто приводятся в движение благодаря движению сферического корпуса.
Этот режим приведения в действие, безусловно, эффективен для подвергания пассажиров центробежным силам и ускорениям, направление и величина которых могут непрерывно изменяться, но он имеет недостаток, заключающийся в невозможности обеспечения особо точного управления траекторией, по которой движется сферический корпус.
Во время движения могут происходить взаимные трения, которые вызывают потерю однозначного соответствия между движением приводимого в действие вращающегося тела и движением сферического корпуса.
Этот недостаток особенно актуален в случае, когда после выполнения серии вращений сферический корпус необходимо вернуть в заданное исходное положение, в котором, например, входная дверь корпуса будет идеально выровнена с пандусом или с расположенной снаружи лестницей, обеспечивающей возможность спуска и подъема пассажиров.
Для управления этим обратным позиционированием в настоящее время необходимо использовать сложную систему управления, которая, помимо усложнения карусели, довольно сильно замедляет обратный ход.
Раскрытие сущности изобретения
В соответствии с вышесказанным, одна из задач настоящего изобретения состоит в том, чтобы предоставить решение, позволяющее преодолеть или по меньшей мере значительно ослабить вышеупомянутый недостаток известного уровня техники.
Другой задачей является решение вышеупомянутой задачи в объеме простого, рационального устройства, обладающего относительно низкой стоимостью.
Эти и другие задачи решаются благодаря использованию в настоящем изобретении признаков, содержащихся в независимом пункте 1 формулы изобретения. В зависимых пунктах формулы изобретения охарактеризованы предпочтительные и/или особенно преимущественные варианты осуществления изобретения.
Более конкретно, настоящее изобретение относится к карусели для парка развлечений, содержащей:
- сферический корпус, выполненный с возможностью вмещения по меньшей мере одного пассажира,
- множество вращающихся тел, выполненных с возможностью оставаться в контакте и вмещать с поддержкой упомянутый сферический корпус, причем каждое из упомянутых вращающихся тел выполнено с возможностью вращения на своей оси вокруг по меньшей мере двух соответствующих осей вращения, одна из которых является осью поворота, проходящей через центр сферического корпуса, а другая – осью качения, перпендикулярной упомянутой оси поворота,
- первые двигательные средства, выполненные с возможностью приведения первого из упомянутых вращающихся тел во вращение вокруг соответствующей оси поворота,
- вторые двигательные средства, выполненные с возможностью приведения упомянутого первого вращающегося тела во вращение вокруг соответствующей оси качения, и
- третьи двигательные средства, выполненные с возможностью приведения второго из упомянутых вращающихся тел во вращение вокруг соответствующей оси поворота.
Благодаря такому решению вращение, придаваемое сферическому корпусу, управляется не только одним вращающимся телом, как это имело место в предшествующем уровне техники, а также управляется и вторым вращающимся телом, которое активно приводится в действие для вращения вокруг его оси поворота и может эффективно использоваться в качестве некоего подобия органа управления.
Таким образом, относительные трения между сферическим корпусом и поддерживающими его вращающимися телами значительно уменьшаются, что обеспечивает более точное управление движениями.
Для дополнительного улучшения управляемости движениями сферического корпуса карусель может содержать, в соответствии с одним аспектом изобретения, также четвертые двигательные средства, выполненные с возможностью приведения вышеупомянутого второго тела во вращение вокруг соответствующей оси качения.
Таким образом, второе вращающееся тело действует не только в качестве органа управления, но и как второй тяговый элемент для сферического корпуса.
В соответствии с другим аспектом изобретения карусель может содержать электронный блок управления, сконфигурированный с возможностью выполнения цикла управления, включающего этапы:
- установление рабочей конфигурации упомянутых вращающихся тел и времени использования, причем упомянутая рабочая конфигурация вращающихся тел включает в себя по меньшей мере одну ориентацию первого вращающегося тела относительно его собственной оси поворота, скорость вращения первого вращающегося тела вокруг его собственной оси качения и ориентацию второго вращающегося тела относительно его собственной оси поворота, и
- управление упомянутыми двигательными средствами с приданием первому вращающемуся телу и второму вращающемуся телу установленной рабочей конфигурации и поддержания ее в течение установленного времени использования.
Благодаря такому решению электронный блок управления обеспечивает возможность эффективного автоматического управления приведением в действие первого и второго вращающихся тел и, соответственно, вращениями, придаваемыми упомянутыми двумя телами сферическому корпусу.
Естественно, если карусель содержит также четвертые двигательные средства, рабочая конфигурация первого и второго вращающихся тел также может содержать скорость вращения второго вращающегося тела вокруг его собственной оси качения.
Очевидно, что описанный выше цикл управления может неоднократно повторяться во время работы карусели, с установлением каждый раз новой рабочей конфигурации и нового времени использования и с соответствующим управлением двигательными средствами.
Таким образом, предпочтительно обеспечена возможность придавать сферическому корпусу сложные движения, например, непрерывно изменяя скорость и ось вращения сферического корпуса в пределах совокупности осей, проходящих через его геометрический центр.
Общая продолжительность каждого цикла управления, то есть время использования каждой рабочей конфигурации, может быть постоянной для всех циклов управления и/или может быть довольно короткой, например, менее одной секунды, так что движение сферического корпуса в целом является по существу равномерным и непрерывным.
Рабочая конфигурация и соответствующее время использования могут быть установлены электронным блоком управления совершенно случайным образом, либо они могут быть установлены на основе заданной траектории, которая должна быть придана сферическому корпусу.
Другими словами, электронный блок управления может быть сконфигурирован для установления траекторией, придаваемой сферическому корпусу, и определения на основе этой траектории рабочей конфигурации и времени использования, необходимого для ее достижения.
Поскольку сферический корпус не может совершать поступательных перемещений, а может только вращаться, термин «траектория» обычно означает угловое смещение или последовательность угловых смещений, которые сферический корпус выполнил относительно фиксированной системы отсчета, чтобы сместиться из заданного начального положения в конечное положение.
Если траектория сложная, электронный блок управления может быть сконфигурирован для придания этой траектории сферическому корпусу посредством последовательности непрерывных циклов управления, например, путем разделения траектории на меньшие сегменты и использования каждого сегмента траектории для установления рабочей конфигурации вращающихся тел и времени использования соответствующего цикла управления упомянутой последовательности.
В любом случае, исходя из траектории (или ее сегмента), придаваемой сферическому корпусу, электронный блок управления может быть сконфигурирован для определения рабочей конфигурации вращающихся тел и соответствующего времени использования посредством математической модели или предварительно составленной карты, в которую передают, в качестве входных данных, траекторию и из которой получают, в качестве выходных данных, рабочую конфигурацию вращающихся тел и соответствующее время использования.
Траектория может быть получена электронным блоком управления из списка предварительно заданных траекторий, который может быть сохранен в блоке памяти и из которого оператор может, посредством соответствующего интерфейсного средства или непосредственно электронного блока управления на основе заданной логики (в том числе случайным образом), выбрать траекторию, которую необходимо придать сферическому корпусу.
Согласно аспекту изобретения, электронный блок управления также может быть сконфигурирован с возможностью:
- определения начального положения сферического корпуса,
- определения конечного положения сферического корпуса, и
- определения траектории, которую нужно придать сферическому корпусу, на основании упомянутого начального положения и упомянутого конечного положения.
Это решение особенно преимущественно, если сферический корпус должен достигать определенного предварительно заданного конечного положения, как это происходит, например, во время обратного хода сферического корпуса, то есть когда сферический корпус должен быть возвращен в исходное положение, в котором он обеспечивает возможность спуска и подъема для пассажиров.
В связи с этим, в соответствии с аспектом изобретения начальное положение траектории сферического корпуса может быть определено посредством электронного блока управления с использованием инерциальной платформы, установленной внутри сферического корпуса.
Благодаря такому решению, перед определением траектории, которая должна быть установлена для достижения конечного положения, например, для выполнения обратного хода, электронный блок управления может точно определить начальное положение сферического корпуса.
Кроме того, благодаря упомянутой инерциальной платформе электронный блок управления может выполнять рекурсивное управление траекторией, по которой следует сферический корпус.
Например, в конце каждого вышеописанного цикла управления электронный блок управления может определять посредством инерциальной платформы положение, фактически достигнутое сферическим корпусом, и на основе этой информации и конечного положения, которое должно быть достигнуто, он может определять траекторию, устанавливаемую для следующего цикла управления.
Что касается конструктивных аспектов, вращающиеся тела могут находиться по существу в одной горизонтальной плоскости и могут быть расположены на равном угловом расстоянии друг от друга относительно вертикальной оси, проходящей через геометрический центр сферического корпуса.
Например, при наличии трех вращающихся тел, упомянутые тела были бы расположены на угловом расстоянии 120° друг от друга, а в случае шести вращающихся тел они были бы расположены на угловом расстоянии 60° друг от друга, и так далее.
Таким образом, можно обеспечить превосходную устойчивость сферического корпуса и препятствовать его вращательным движениям.
В соответствии с другим аспектом настоящего изобретения, каждое из упомянутых вращающихся тел может быть соединено, с возможностью вращения вокруг оси качения, с соответствующим несущим элементом, а упомянутый несущий элемент, в свою очередь, может быть соединен, с возможностью вращения вокруг оси поворота, с опорной рамой.
Таким образом, создано довольно простое решение, обеспечивающее наличие у вращающихся тел необходимых степеней свободы.
Например, каждый вращающийся элемент может представлять собой колесо, расположенное тангенциально к сферическому корпусу, а соответствующий несущий элемент может представлять собой кронштейн, на котором установлено упомянутое колесо.
Однако некоторые из вращающихся тел, например те, которые не являются приводными, могут быть просто сферами, выполненными с возможностью неприводного вращения вокруг любой оси, проходящей через их центр.
Краткое описание чертежей
Другие характеристики и преимущества настоящего изобретения станут ясны из последующего описания, приведенного в качестве неограничивающего примера со ссылкой на фигуры прилагаемых чертежей.
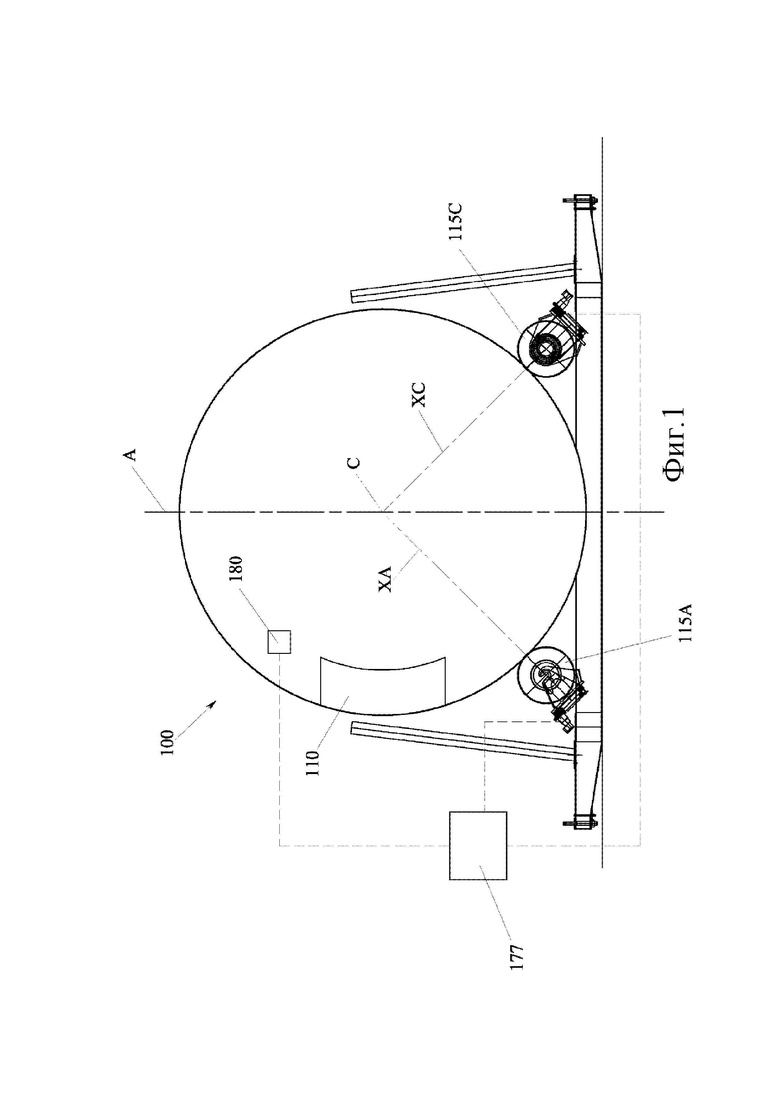
Фиг.1 представляет собой разрез карусели в соответствии с вариантом осуществления настоящего изобретения, выполненный по плоскости l-l, показанной на фиг.2.
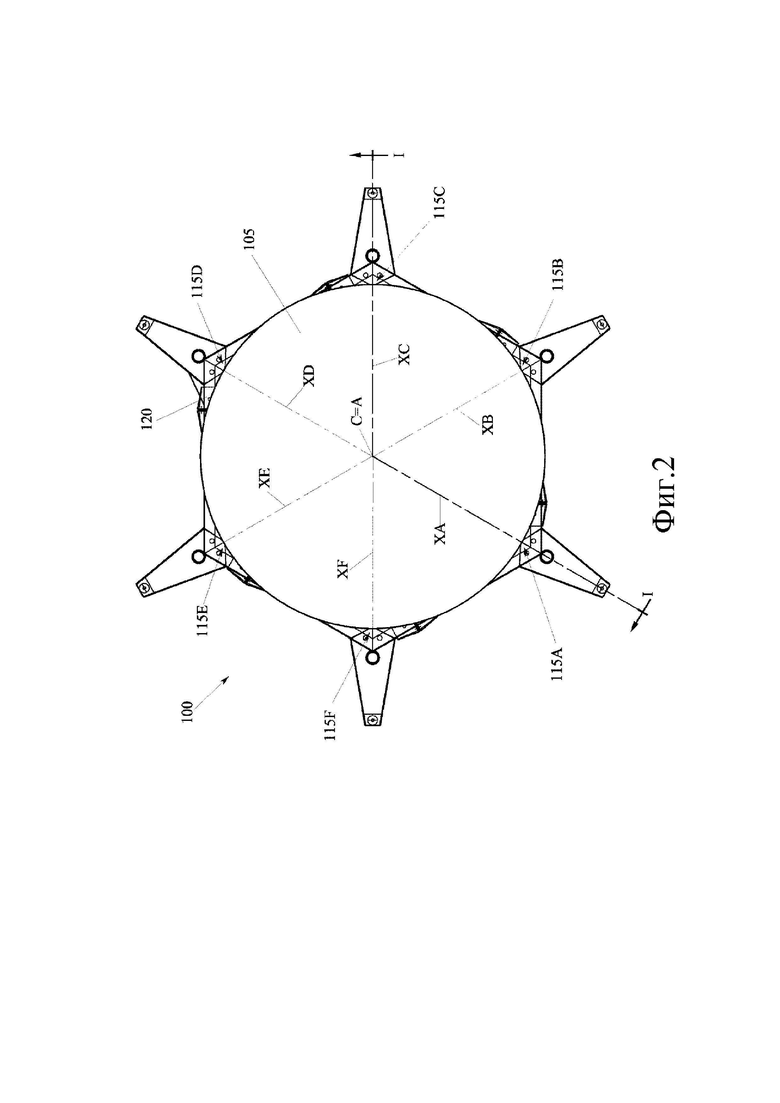
Фиг.2 представляет собой вид сверху карусели, показанной на фиг.1.
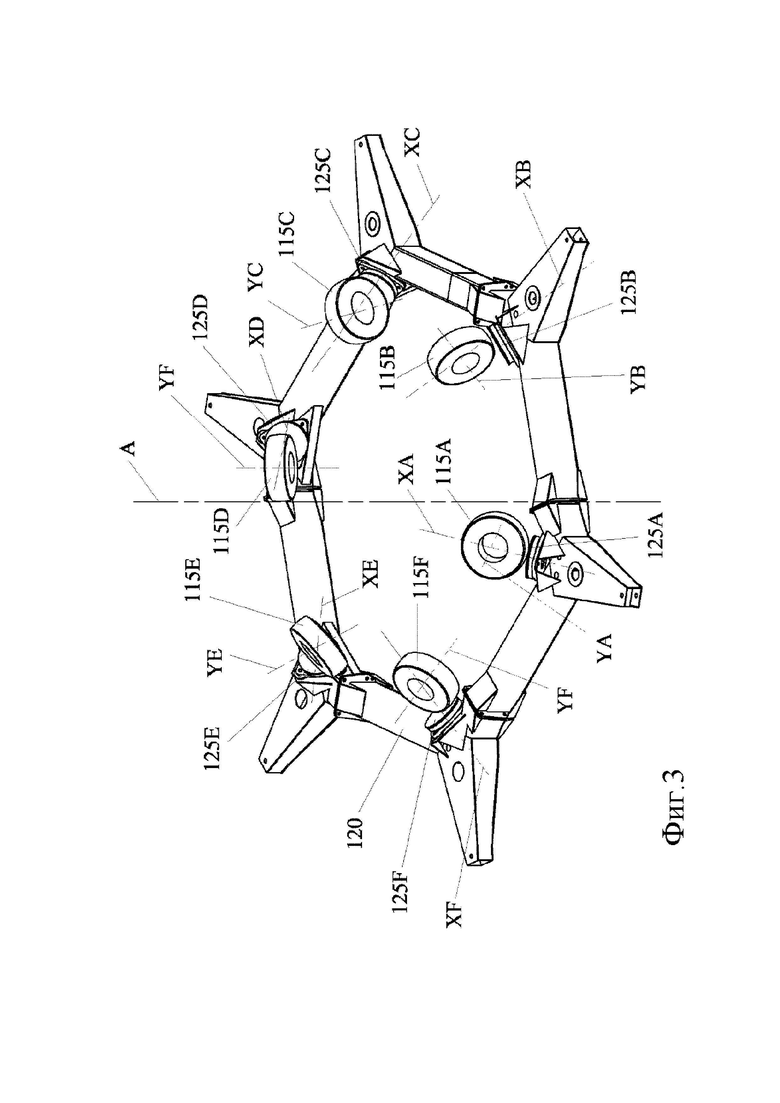
Фиг.3 представляет собой вид в аксонометрии опорной рамы карусели, показанной на фиг.1.
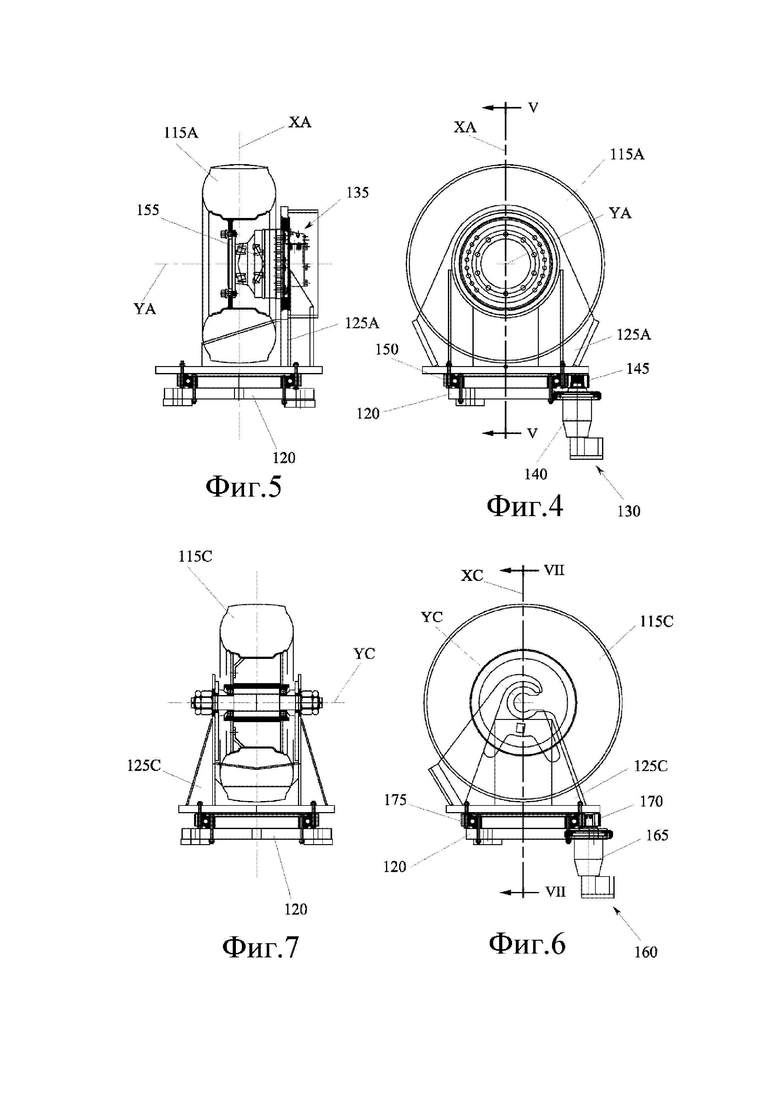
Фиг.4 представляет собой вид сбоку первого приводного колеса карусели, показанной на фиг.1.
Фиг.5 представляет собой разрез V-V, обозначенный на фиг.4.
Фиг.6 представляет собой вид сбоку второго приводного колеса карусели, показанной на фиг.1.
Фиг.7 представляет собой разрез VII-VII, обозначенный на фиг.6.
Осуществление изобретения
На вышеупомянутых чертежах показана карусель 100 для парков развлечений, содержащая сферический корпус 105, выполненный с возможностью вмещения по меньшей мере одного пассажира.
Сферический корпус 105 может быть выполнен в виде клетки или в виде закрытого тела и может быть изготовлен из металлического материала.
Например, сферический корпус 105 может быть собран путем сварки металлических пластинчатых клинообразных сегментов со сферическим профилем и может иметь две противоположные полюсные области, открытые или закрытые крышкой.
Внутри сферического корпуса 105 может быть установлено одно или более сидений для пассажиров (не показаны), которые могут быть снабжены соответствующими элементами безопасности, например ремнями безопасности или ограничительными планками для надежного удержания пассажиров.
Кроме того, сферический корпус 105 может иметь входную дверь 110, через которую могут входить и выходить пассажиры.
Сферический корпус 105 расположен таким образом, что он опирается на множество вращающихся тел и находится в контакте с ними. Упомянутые тела, обозначенные на фиг.3 ссылочными позициями от 115А до 115F, находятся по существу в одной горизонтальной плоскости и расположены на одинаковом угловом расстоянии друг от друга относительно вертикальной оси А, проходящей через геометрический центр С сферического корпуса 105.
В рассматриваемом примере имеется шесть вращающихся тел 115-115F, которые, соответственно, разделены угловым расстоянием, равным 60 градусам, относительно вышеупомянутой вертикальной оси А.
Каждое из этих вращающихся тел 115A-115F может вращаться вокруг по меньшей мере двух соответствующих осей вращения, которыми являются ось XA-XF поворота, проходящая через геометрический центр C сферического корпуса, и ось YA-YF качения, перпендикулярная упомянутой оси XA-XF поворота и предпочтительно пересекающая ее.
Таким образом, сферический корпус 105 надежно поддерживается вращающимися телами 115A-115F, которые не позволяют ему совершать какие-либо поступательные перемещения, но позволяют вращаться на своей оси вокруг бесконечного числа осей вращения, проходящих через геометрический центр C корпуса, остающийся зафиксированным.
В рассматриваемом примере каждое вращающееся тело 115А-115F состоит из колеса, расположенного тангенциально к сферическому корпусу 105 и соединенного с опорной рамой 120 посредством соответствующего кронштейна 125A-125F.
Каждый кронштейн 125A-125F соединен с возможностью поворота с опорной рамой 120 таким образом, что он может вращаться вокруг соответствующей оси XA- XF поворота, в то время как соответствующее колесо соединено с возможностью вращения с кронштейном 125A-125F таким образом, что оно может вращаться вокруг соответствующей оси YA-YF качения.
Опорная рама 120 может быть общей для всех вращающихся тел 115A-115F и может иметь по существу шестиугольную форму, в вершинах которой расположены кронштейны 125A-125F.
Как показано на фиг.4 и 5, с первым вращающимся телом 115А связаны первые двигательные средства 130, выполненные с возможностью приведения упомянутого тела во вращение вокруг соответствующей оси XA поворота, и вторые двигательные средства 135, выполненные с возможностью приведения упомянутого тела во вращение вокруг соответствующей оси YA качения.
В частности, в показанном примере, первые двигательные средства 130 обеспечивают возможность поворота кронштейна 125A первого вращающегося тела 115А относительно опорной рамы 120, в то время как вторые двигательные средства обеспечивают возможность вращения первого вращающегося тела 115A (в частности, колеса) относительно кронштейна 125А.
В частности, первые двигательные средства 130 могут содержать двигатель 140, например, гидравлический двигатель, который может быть установлен на опорной раме 120, и на приводной вал которого может быть насажена ведущая шестерня 145, которая, в свою очередь, входит в зацепление с соответствующим зубчатым колесом 150, установленным на кронштейне 125А. Вторые двигательные средства 135 могут содержать дополнительный двигатель 155, например, дополнительный гидравлический двигатель, который может быть установлен на кронштейне 125А, и на приводной вал которого может быть непосредственно насажено колесо.
В соответствии с аспектом настоящего изобретения, среди вращающихся тел 115А-115F, поддерживающих сферический корпус 105, имеется также второе вращающееся тело 115С, с которым связан третьи двигательные средства 160, обеспечивающие возможность вращения упомянутого тела вокруг соответствующей оси ХC поворота (см. фиг.6 и 7).
Как и в предыдущем случае, третьи двигательные средства 160 могут обеспечивать вращение кронштейна 125С второго вращающегося тела 115C (в данном случае выполненного в виде вилки) относительно опорной рамы 120, и может содержать двигатель 165, например, гидравлический двигатель, который может быть установлен на опорной раме 120, и на приводной вал которого может быть насажена ведущая шестерня 170, входящая в зацепление с соответствующим зубчатым колесом 175, установленным на кронштейне 125C. Кроме того, в некоторых вариантах осуществления со вторым вращающимся телом 115C может быть соединен четвертые двигательные средства, обеспечивающие возможность вращения упомянутого тела вокруг соответствующей оси YC качения.
В данном описании эти четвертые двигательные средства не показаны и не рассмотрены более подробно, поскольку они может быть аналогичны вторым двигательным средствам 135, предусмотренным для первого вращающегося тела 115А.
Второе вращающееся тело 115С предпочтительно отдалено от первого вращающегося тела 115А (относительно вертикальной оси А) на угловое расстояние с углом, равным или превышающим 90 градусов (см. фиг.2).
Соответственно, в показанном примере второе вращающееся тело 115С не является одним из тел, которые расположены непосредственно рядом с первым вращающимся телом 115А, а отделено от него на угловое расстояние с углом 120 градусов.
Если четвертые двигательные средства отсутствуют, второе вращающееся тело 115C может свободно вращаться, будучи неприводным, вокруг своей собственной оси XC качения.
Все другие вращающиеся тела 115B, 115D, 115E, 115F могут свободно вращаться, будучи неприводными, как относительно их осей XB, XD, XE, XF поворота, так и относительно их осей YB, YD, YE, YF качения.
Все двигательные средства, первые двигательные средства 130, вторые двигательные средства 135, третьи двигательные средства 160 и, возможно, также четвертые двигательные средства, соединены с одним электронным блоком управления, изображенным схематически и обозначенным позицией 177 на фиг.1.
Электронный блок 177 управления может быть дополнительно соединен, например, посредством системы беспроводной связи, с инерциальной платформой 180, установленной в фиксированном положении внутри сферического корпуса 105.
Благодаря этой инерциальной платформе 180 электронный блок 177 управления может определять фактическое положение сферического корпуса 105 по отношению к системе отсчета, например, системе отсчета, составляющей одно целое с опорной рамой 120 и, следовательно, с грунтом, на который опирается упомянутая рама.
Положение сферического корпуса 105 может быть определено как относительное положение между вышеупомянутой фиксированной системой отсчета и мобильной системой отсчета, составляющей одно целое со сферическим корпусом 105.
Например, предполагая, что обе эти системы отсчета являются декартовыми системами и что их точки начала отсчета совпадают с геометрическим центром С сферического корпуса 105, положение сферического корпуса может быть определено как ориентация, принятая в системе отсчета, составляющей одно целое со сферическим корпусом 105, по отношению к системе отсчета, составляющей одно целое с опорной рамой 120, и может быть выражено, например, посредством совокупности трех угловых координат.
Работа карусели 100 может быть описана начиная с момента, когда сферический корпус 105 находится в заданном исходном положении, в котором, например, входная дверь 110 совмещена с пандусом или лестницей для подъема и спуска пассажиров (не показаны).
Когда сферический корпус 105 останавливается в этом исходном положении, электронный блок 177 управления может быть сконфигурирован для установления траектории, которая должна быть передана упомянутому корпусу.
Поскольку сферический корпус 105 не может совершать поступательных перемещений, а может только вращаться, термин «траектория» обычно означает угловое смещение или последовательность угловых смещений, которые сферический корпус должен выполнить относительно фиксированной системы отсчета.
Траектория может быть получена электронным блоком 177 управления из списка предварительно заданных траекторий, который может быть сохранен в блоке памяти (не показан) и из которого оператор может, посредством соответствующего интерфейсного средства или непосредственно электронного блока 177 управления, на основе заданной логики (в том числе случайным образом), выбрать траекторию, которую необходимо придать сферическому корпусу.
В этом случае электронный блок 177 управления может выполнять цикл управления, в котором в первую очередь происходит установление, на основе заранее заданной траектории, рабочей конфигурации для первых двигательных средств 130, вторых двигательных средств 135, третьих двигательных средств 160 и, возможно, также четвертых двигательных средств, и времени использования.
Рабочая конфигурация содержит, например, по меньшей мере одну ориентацию первого вращающегося тела 115A относительно его собственной оси XA поворота, одну скорость вращения первого вращающегося тела 115A вокруг его собственной оси YA качения, ориентацию второго вращающегося тела 115C относительно его собственной оси XC поворота и, если предусмотрен вышеупомянутые четвертые двигательные средства, также скорость вращения второго вращающегося тела 115C относительно его собственной оси YC качения.
Исходя из траектории, которая должна быть придана сферическому корпусу 105, рабочая конфигурация вращающихся тел и время использования могут быть установлены электронным блоком 177 управления посредством математической модели или предварительно составленной карты, в которую передают, в качестве входных данных, траекторию и из которой получают, в качестве выходных данных, соответствующую рабочую конфигурацию вращающихся тел и время использования.
В связи с этим следует отметить, что во избежание трения ориентация и скорость вращения второго вращающегося тела 115С, как правило, находятся в однозначном соответствии (получаемом из геометрических характеристик сферического корпуса 105) с ориентацией и скоростью вращения первого вращающегося тела 115А, так что первые упомянутые ориентация и скорость вращения могут быть получены из вторых, или наоборот.
В этом случае цикл управления может обеспечивать возможность управления, посредством электронного блока 177 управления, первыми двигательными средствами 130, вторыми двигательными средствами 135, третьими двигательными средствами 160 и, возможно, четвертыми двигательными средствами, чтобы придать первому вращающемуся телу 115A и второму вращающемуся телу 115C установленную рабочую конфигурацию и поддерживать ее в течение установленного времени использования.
Таким образом, сферический корпус 105 начинает двигаться из исходного положения, следуя по заданной траектории, до достижения определенного конечного положения в конце времени использования.
Исходя из этого конечного положения, цикл управления может естественным образом повторяться один или более раз, с установлением каждый раз новой траектории, пока не будет достигнут конец цикла.
Если заданная траектория является особенно длинной или сложной, электронный блок 177 управления может быть сконфигурирован для придания этой траектории сферическому корпусу путем последовательного повторения множества непрерывных циклов управления.
Например, электронный блок 177 управления может разделять траекторию на более мелкие сегменты, то есть представлять траекторию в виде последовательности более коротких и простых траекторий, и использовать каждый сегмент траектории для установления рабочей конфигурации вращающихся тел и времени использования соответствующего цикла управления упомянутой последовательности.
Как правило, время использования каждой рабочей конфигурации, то есть общая продолжительность каждого цикла управления, может быть постоянным для всех циклов управления и/или может быть довольно коротким, например, менее одной секунды, так что движение сферического корпуса 105 в целом является по существу равномерным и непрерывным.
После завершения хода сферический корпус 105 будет находиться в определенном положении конца хода, полученном как результат совокупности приданных траекторий. Однако, если во время различных смещений между сферическим корпусом 105 и вращающимися телами 115А-115F имелись трения, положение конца хода может немного отличаться от предполагаемого положения и быть заранее неизвестным.
В связи с этим, электронный блок 177 управления может использовать инерциальную платформу 180 для точного определения положения конца хода, достигаемого сферическим корпусом 105.
В этот момент электронный блок 177 управления может быть сконфигурирован так, чтобы сферический корпус 105 выполнял возвратный ход, то есть ход для возвращения корпуса в исходное положение.
Для этого электронный блок 177 управления может быть сконфигурирован для определения траектории, придаваемой сферическому корпусу 105, на основе положения конца хода, определенного посредством инерциальной платформы 180, и исходного положения, которое может быть известным конструктивным параметром.
В частности, траектория может быть установлена посредством математической модели, которая вычисляет устанавливаемую траекторию в зависимости от координат начального положения сферического корпуса 105 (в данном конкретном случае, положения конца хода) и координат конечного положения (в данном конкретном случае, исходного положения).
В качестве альтернативы, траектория может быть установлена посредством заданной карты, в которую передают, в качестве входных данных, координаты начального положения и конечного положения и из которой получают упомянутую траекторию.
Как только траектория установлена, электронный блок 177 управления может быть сконфигурирован для выполнения того же цикла управления или той же последовательности циклов управления, как описано выше.
Однако, для ускорения фазы возврата, предусмотрена возможность того, что после каждого цикла управления, электронный блок 177 управления измеряет посредством инерциальной платформы 180 положение, фактически достигнутое сферическим корпусом 105, и повторно определяет траекторию, которая будет использована в последующем цикле управления на основе этого нового положения и достигаемого конечного положения (которое в конкретном случае остается положением пуска).
Следует отметить, что в некоторых вариантах осуществления упомянутая последняя процедура также может использоваться для подачи команды на запуск.
Очевидно, что специалист в данной области техники может вносить многочисленные технические и прикладные модификации в вышеописанную карусель 100, не выходя при этом за рамки объема представленной далее формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЧАСТОТНАЯ СИСТЕМА ДЛЯ ОБРАБОТКИ КОЖИ, ВКЛЮЧАЮЩАЯ В СЕБЯ РОЛИК С ЭЛЕКТРОДОМ, А ТАКЖЕ СПОСОБ ОБРАБОТКИ КОЖИ | 2013 |
|
RU2637104C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЛИ ВОЗВРАТА ИСКУССТВЕННЫХ СПУТНИКОВ | 2012 |
|
RU2600971C2 |
| НАКОПИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ОТДЕЛЬНЫХ ОБЪЕКТОВ ИЗ БУМАГИ ИЛИ ПЛЕНКИ И СООТВЕТСТВУЮЩИЕ СПОСОБЫ | 2010 |
|
RU2531002C2 |
| ВРАЩАТЕЛЬНОЕ УСТРОЙСТВО И ПРИВОД ВРАЩЕНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2568343C1 |
| ВЫРАВНИВАНИЕ ТОКОВ В СИСТЕМЕ ПАРАЛЛЕЛЬНЫХ МОДУЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2017 |
|
RU2735355C2 |
| РАСШИРИТЕЛЬНЫЙ БАК ДЛЯ ГАЗОВОГО ВОДОНАГРЕВАТЕЛЯ | 2011 |
|
RU2531717C1 |
| УСТРОЙСТВО ДЛЯ ПРИДАНИЯ ОБЩЕЙ ПОДВИЖНОСТИ ТЕЛУ | 2007 |
|
RU2414944C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2006 |
|
RU2367047C1 |
| МАШИНА ДЛЯ НАНЕСЕНИЯ ЭТИКЕТОК | 2003 |
|
RU2330796C2 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
Описана карусель (100) для парков развлечений, содержащая сферический корпус (105), выполненный с возможностью вмещения по меньшей мере одного пассажира, множество вращающихся тел (115A-115F), выполненных с возможностью оставаться в контакте и вмещать с поддержкой упомянутый сферический корпус (105), причем каждое из упомянутых вращающихся тел (115A-115F) выполнено с возможностью вращения на своей оси по меньшей мере вокруг двух соответствующих осей вращения, одной из которых является ось (XA-XF) поворота, проходящая через центр (C) сферического корпуса (105), а другой – ось (YA-YF) качения, перпендикулярная упомянутой оси (XA-XF) поворота, первые двигательные средства (130), выполненные с возможностью приведения первого вращающегося тела (115А) из упомянутых вращающихся тел во вращение вокруг соответствующей оси (ХА) поворота, вторые двигательные средства (135), выполненные с возможностью приведения упомянутого первого вращающегося тела (115А) во вращение вокруг соответствующей оси (YA) качения, и третьи двигательные средства (160), выполненные с возможностью приведения второго вращающегося тела (115С) из упомянутых вращающихся тел во вращение вокруг соответствующей оси (ХС) поворота. 8 з.п. ф-лы, 7 ил.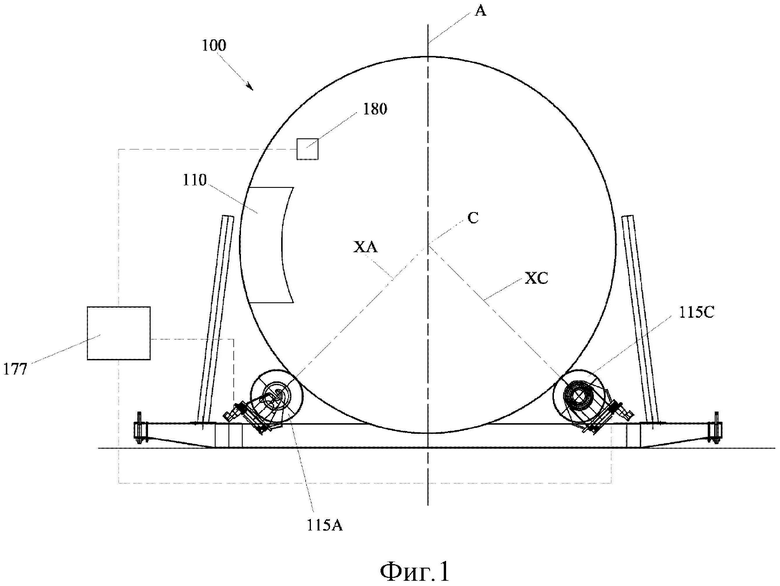
1. Карусель (100) для парков развлечений, содержащая
- сферический корпус (105), выполненный с возможностью вмещения по меньшей мере одного пассажира,
- множество вращающихся тел (115A-115F), выполненных с возможностью оставаться в контакте и вмещать с поддержкой упомянутый сферический корпус (105), причем каждое из упомянутых вращающихся тел (115A-115F) выполнено с возможностью вращения на своей оси по меньшей мере вокруг двух соответствующих осей вращения, одна из которых является осью (XA-XF) поворота, проходящей через центр (C) сферического корпуса (105), а другая - осью (YA-YF) качения, перпендикулярной упомянутой оси (XA-XF) поворота,
- первые двигательные средства (130), выполненные с возможностью приведения первого вращающегося тела (115А) из упомянутых вращающихся тел во вращение вокруг соответствующей оси (ХА) поворота, и
- вторые двигательные средства (135), выполненные с возможностью приведения упомянутого первого вращающегося тела (115А) во вращение вокруг соответствующей оси (YA) качения,
- третьи двигательные средства (160), выполненные с возможностью приведения второго вращающегося тела (115С) из упомянутых вращающихся тел во вращение вокруг соответствующей оси (ХС) поворота, и
- электронный блок (177) управления,
отличающаяся тем, что электронный блок (177) управления конфигурирован с возможностью выполнения цикла управления, включающего этапы:
- установление рабочей конфигурации упомянутых вращающихся тел и времени использования, причем упомянутая рабочая конфигурация вращающихся тел включает в себя по меньшей мере одну ориентацию первого вращающегося тела (115А) относительно его собственной оси (XA) поворота, скорость вращения первого вращающегося тела (115A) вокруг его собственной оси (YA) качения и ориентацию второго вращающегося тела (115C) относительно его собственной оси (XC) поворота, и
- управление упомянутыми двигательными средствами (130, 135, 160) с обеспечением придания первому вращающемуся телу (115А) и второму вращающемуся телу (115С) установленной рабочей конфигурации и поддержания ее в течение установленного времени использования.
2. Карусель (100) по п.1, отличающаяся тем, что она содержит четвертые двигательные средства, выполненные с возможностью приведения упомянутого второго вращающегося тела (115С) в движение вокруг соответствующей оси (YC) качения.
3. Карусель (100) по п.2, отличающаяся тем, что рабочая конфигурация содержит также скорость вращения второго вращающегося тела (115С) вокруг его собственной оси (YC) качения.
4. Карусель (100) по любому из пп.1-3, отличающаяся тем, что рабочая конфигурация и соответствующее время использования установлены электронным блоком (177) управления на основе заданной траектории, которая должна быть придана сферическому корпусу (105).
5. Карусель (100) по п.4, отличающаяся тем, что электронный блок (177) управления сконфигурирован с возможностью:
определения начального положения сферического корпуса (105),
определения конечного положения сферического корпуса (105) и
определения траектории, придаваемой сферическому корпусу (105), на основе упомянутого начального положения и упомянутого конечного положения.
6. Карусель (100) по п.5, отличающаяся тем, что начальное положение сферического корпуса определено посредством электронного блока (177) управления с использованием инерциальной платформы (180), установленной внутри сферического корпуса (105).
7. Карусель (100) по любому из пп.1-6, отличающаяся тем, что вращающиеся тела (115А-115F) находятся по существу в одной горизонтальной плоскости и расположены на одинаковом угловом расстоянии друг от друга относительно вертикальной оси (А), проходящей через центр (С) сферического корпуса (105).
8. Карусель (100) по любому из пп.1-7, отличающаяся тем, что каждое из упомянутых вращающихся тел (115А-115F) соединено с возможностью вращения с соответствующим несущим элементом (125А-125F) в соответствии с осью (YA-YF) качения, а упомянутый несущий элемент (125А-125F) соединен с возможностью вращения с опорной рамой в соответствии с осью (ХА-XF) поворота.
9. Карусель (100) по п.8, отличающаяся тем, что каждый вращающийся элемент (115А-115F) представляет собой колесо, расположенное тангенциально к сферическому корпусу, а соответствующий несущий элемент (125А-125F) представляет собой кронштейн, на котором установлено упомянутое колесо.
| US 5060932 A, 29.10.1991 | |||
| US 5490784 A, 13.02.1996 | |||
| US 2003125119 A1, 03.07.2003 | |||
| US 2006213306 A1, 28.09.2006. |

