Изобретение относится к машиностроению и может быть использовано в качестве привода автомобиля, тягача, робота и т.д.
По описанию к патенту РФ №2297356 (опубл. 10.06.2004 г.) известен шароход, в котором грузовая рама, на которой расположены кабина и двигательная установка с колесным движителем, сочленена через четыре горизонтально расположенных колеса с кольцевой рамой, которая через четыре вертикально расположенных колеса сочленена с внутренней стороной сферы. Вращение от двигательной установки колесного движителя, фрикционно сочлененного со сферой в нижней ее части, передается сфере и обеспечивает движение шарохода с регулируемой скоростью. Изменение углового положения колесного движителя относительно вертикальной оси обеспечивает изменение направления движения шарохода.
Недостатком данной конструкции является то, что передача крутящего момента производится посредством силы тяжести, которая, воздействуя на внутреннюю раму с колесами, перемещающуюся по внутренней поверхности сферы-шара, смещает его центр тяжести, создавая крутящий момент. Ограниченность технических возможностей конструкции заключается в том, что крутящий момент не может превышать вес, перемещающейся внутри шара рамы. Кроме того, такая конструкция может хорошо двигаться преимущественно по горизонтальной плоскости, угол подъема ограничен действием все той же силы тяжести.
Всемирно известен автомобиль, который состоит из несущей рамы, колес и трансмиссии, как совокупности механизмов и агрегатов для передачи крутящего момента от двигателя к ведущим колесам автомобиля. Трансмиссия предназначена для изменения величины крутящего момента, а также для изменения направления движения. Если мы имеем переднеприводный автомобиль, то крутящий момент от мотора к колесам передается на передние колеса, если заднеприводный - то на задние колеса. Также выпускаются автомашины с четырьмя ведущими колесами.
Недостатком такой конструкции является то, что она ограничена в маневренности и возможностях перемещения по пересеченной местности.
Наиболее близкой по конструкции и функциональным возможностям является двигательная система для автомобиля по международному патенту №WO 0206063 А1 (опубл. 24.01.2002), состоящая из двух или более колес, выполненных в виде соосных полусферических сегментов одного радиуса с возможностью их свободного вращения независимо друг от друга. Каждое полусферическое колесо установлено на два взаимно перпендикулярных вала, которые снабжены приводами: одним для вращения колеса, другим для контролируемого поворота последнего. Данная трансмиссия позволяет менять радиус контакта с поверхностью, по которой перемещается двигательная система, и соответственно менять скорость движения. Это позволяет иметь дополнительную возможность регулировки скорости и силы отталкивания от грунта, по которому перемещается двигательная система.
Недостатком данной конструкции является отсутствие возможности полной остановки двигательной системы при работающих приводах вращения полусфер. Такая возможность позволила бы накапливать кинетическую энергию перед началом движения.
Предлагаемым изобретением решается задача расширения технических возможностей транспортного средства, его трансмиссии и возможности более широкого применения данной трансмиссии как в робототехнике, так и на транспорте вообще.
Для достижения этого технического результата в сферомобиле, состоящем из несущей рамы, двигателя трансмиссии и не менее двух или более колес, установленных на взаимно перпендикулярные оси или валы, приводящие последние во вращение, причем колеса выполнены в виде полусферических сегментов одного радиуса, и каждый полусферический сегмент снабжен приводами: одним для его вращения, другим для контролируемого поворота последнего, причем поворот колес возможен как одновременно на всех колесах, так или на правых, или на левых колесах под любым углом от горизонтального положения до вертикального с возможностью фиксированной остановки в этом положении и от вертикального во внутреннюю сторону несущей рамы сферомобиля. Каждое колесо выполнено в виде двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой малый установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси, причем усеченный сегмент снабжен приводом и в вертикальном положении может быть приведен во вращение на малом сегменте вокруг их общей оси.
Отличительным признаком предлагаемого сферомобиля является наличие полусферических колес, каждое из которых выполнено в виде двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой малый установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси, причем усеченный сегмент снабжен приводом и в вертикальном положении может быть приведен во вращение на малом сегменте вокруг их общей оси.
Наличие отличительных признаков позволяет запасать кинетическую энергию вращения полусферических колес, изменять направление движения, скорость транспортного средства, а также преодолевать трудно проходимые места.
Вариант предлагаемого сферомобиля иллюстрируется чертежами, представленными на фиг. 1-13.
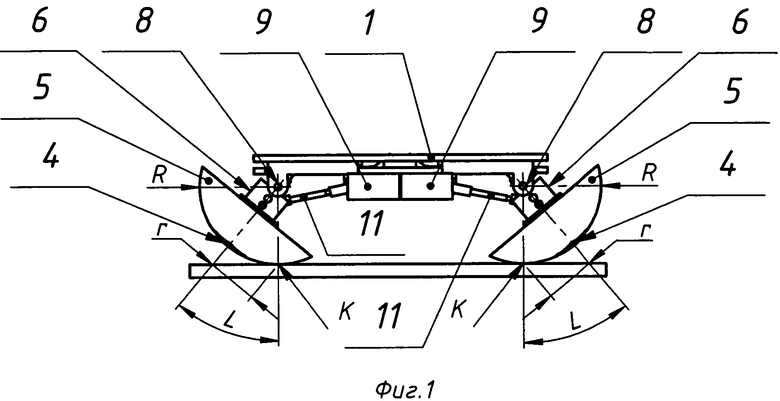
На фиг. 1 - вид спереди (положение колес при движении вперед);
на фиг. 2 - то же, вид в изометрии;
на фиг. 3 - вид спереди (положение колес - горизонтальное);
на фиг. 4 - то же, вид в изометрии;
на фиг. 5 - вид спереди (при движении вперед - поворот налево);
на фиг. 6 - то же, вид в изометрии;
на фиг. 7 - вид спереди (при движении вперед - поворот направо);
на фиг. 8 - то же, вид в изометрии;
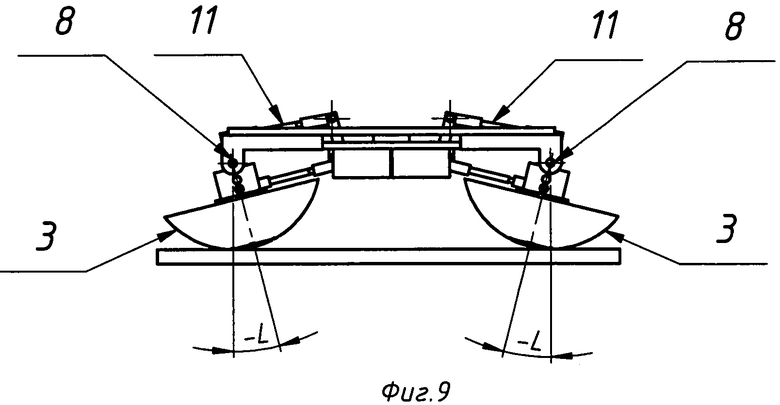
на фиг. 9 - вид спереди при движении назад;
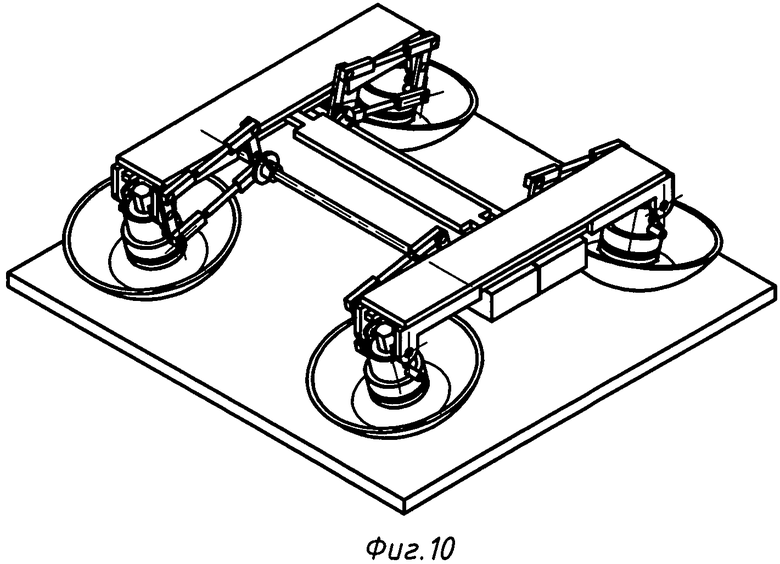
на фиг. 10 - то же, вид в изометрии;
на фиг. 11 - вид спереди (положение колес - горизонтальное);
на фиг. 12 - разрез по А-А;
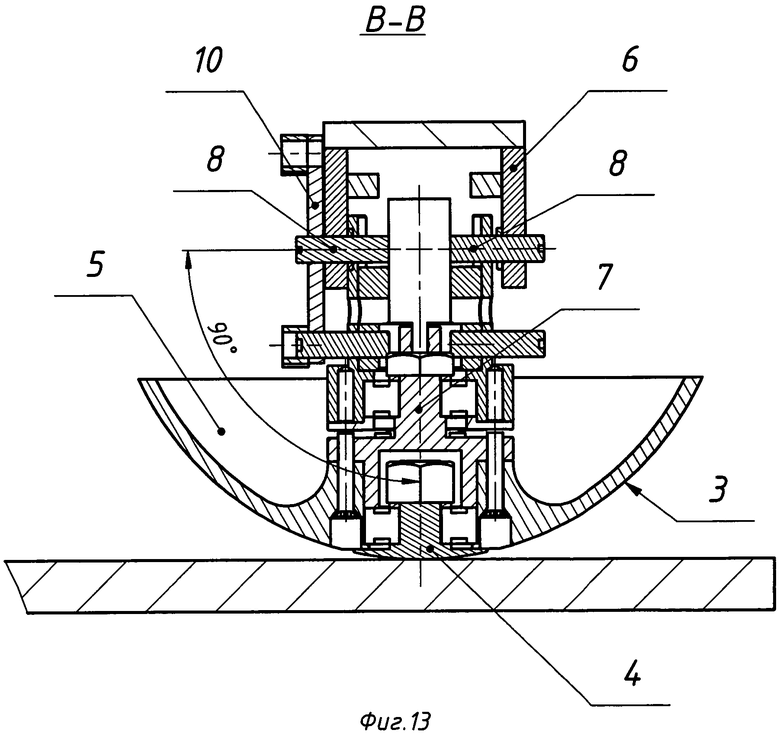
на фиг. 13 - вид В, увеличено по разрезу А-А
Вариант исполнения предлагаемого транспортного средства представлен в виде модели (фиг. 1-13). Сферомобиль состоит из двух платформ 1, представляющих собой несущую раму, соединительной планки 2, колес 3, выполненных в виде соосных полусферических сегментов 4 и 5 одного радиуса (фиг. 11-13), привода вращения колеса 6, вала колеса 7 (фиг. 13), оси колеса 8 (фиг. 13), привода поворота колеса 9 (фиг. 1-3), рычага поворота колеса 10 (фиг. 2, 13), тяги привода поворота колеса 11, соединительного вала 12.
Сферомобиль работает следующим образом. При синхронной передаче крутящего момента на колеса 3 с приводов 6 сферомобиль начинает двигаться по прямой соответственно направлению предаваемого крутящего момента (фиг. 1-2). Все колеса 3 сферомобиля вращаются, синхронно перемещая его соответственно направлению своего вращения. Вал 7 и ось 8 колеса 3 (фиг. 13) пресекаются в точке, являющейся центром полусферического колеса 3. При синхронном изменении угла L (фиг. 1) на всех колесах 3 синхронно изменяется линейная скорость перемещения сферомобиля - уменьшается или увеличивается, так как изменяется радиус контакта в точке К с максимально возможного R до r (фиг. 1).
Для изменения направления движения - поворота сферомобиля изменяем угол (L) (фиг.1) вращения валов 7 колес 3 (фиг. 5-8) посредством поворота колес 3 вокруг осей этих колес 8 приводами поворота колес 9 правого или левого. В результате изменения угла наклона оси L вращения колеса 3 уменьшается его радиус контакта с поверхностью, по которой движется сферомобиль с максимально возможного R до r, как показано на фиг. 1. При этом изменении снижается линейная скорость перемещения правых или левых колес 3 (уменьшается радиус контакта в точке К до r), при том, что противоположные колеса 3 находятся в контакте с поверхностью, по которой движется сферомобиль по радиусу большему, чем r (фиг. 5-8). Сферомобиль поворачивает в сторону меньшего радиуса контакта r. Изменяя радиус контакта колес 3 двух правых или двух левых, изменяем направление движения сферомобиля - поворот вправо или влево. Для поворотов сферомобилю не нужно рулевое управление, как в автомобиле. Управление сферомобилем осуществляется изменением попарно угла наклона колес 3.
Кроме высокой маневренности, которая достигается предлагаемой конструкцией сферомобиля, последний может менять скорость перемещения и крутящий момент - силу отталкивания от грунта, по которому он движется, если изменение угла наклона L осей вращения колес 3 происходит синхронно - всех четырех. При таком одновременном изменении угла наклона валов вращения 7 всех четырех колес 3 в месте их контакта с грунтом увеличивается или уменьшается скорость перемещения сферомобиля и соответственно крутящий момент и как следствие этого сила отталкивания от грунта (так как уменьшается радиус контакта сферических колес). Если принять угловую скорость вращения колес 3 сферомобиля при постоянном моменте, передаваемом на них приводами 6 за ω, то зависимость скорости перемещения сферомобиля по грунту V от угла наклона L и радиуса колеса 3 - R (фиг. 1-2) можно выразить зависимостью:
V=COS (L)* ω *R
Таким образом менять скорость движения сферомобиля, его ускорение при постоянном крутящем моменте, который передается на колеса 3 с приводов 6, можно за счет синхронного изменения угла L поворота валов вращения 7 колес 3 вокруг горизонтальной оси 8 посредством синхронного поворота последних на определенный угол L приводами поворота колес 9 вправо или влево. Также за счет этого можно тормозить или переводить сферомобиль в неподвижное состояние при повороте валов 7 колес 3 в вертикальное положение (фиг. 13). В таком положении часть колеса сегмент 5 будет вращаться на сегменте 4, который приводится во вращение приводом вращения 6 колеса 3. Такое состояние сферомобиля позволяет накапливать кинетическую энергию вращения колес и в любое время перевести ее в поступательное движение всего сферомобиля. При движении сферомобиля назад колеса 3 поворачиваются вокруг осей 8 в сторону несущей рамы сферомобиля (фиг. 9-10).
Описываемый вариант сферомобиля является прототипом транспортных средств, с техническими характеристиками, расширяющими возможность его использования.
Например, при больших полусферических колесах 3 последние при повороте вокруг горизонтальных осей 8 всех четырех полусферических колес 3 будут образовывать движущуюся поверхность между грунтом и днищем транспортного средства. Это позволит последнему преодолевать труднопроходимые места (болото, песок, снег, грязь и т.д.) значительно эффективнее гусеничного или шнекового транспортных средств, так как уменьшается мертвая зона между днищем транспортного средства и грунтом, по которому оно перемещается.
Практически мы получаем колесо, которое меняет свой радиус и позволяет значительно сократить мертвую зону, которая присутствует в большинстве подобных транспортных средств. Возможности предлагаемого транспортного средства позволят создавать новые амфибии, а также применять эту конструкцию в робототехнике, так как не требуется редуктора коробки скоростей для изменения момента или она может быть значительно проще и меньше. Кроме этого в предлагаемой трансмиссии возможно накопление кинетической энергии вращения полусферических колес, а также плавное или практически мгновенное изменение скорости транспортного средства за счет скорости изменения угла наклона оси вращения сферических колес.
| название | год | авторы | номер документа |
|---|---|---|---|
| СФЕРОМОБИЛЬ | 2015 |
|
RU2584407C1 |
| ШАРОХОД | 2002 |
|
RU2297356C2 |
| Механизм компенсации продольных смещений ведущего моста | 2017 |
|
RU2674966C1 |
| ШАР-КОЛЕСО КАЛИНКИНА | 2012 |
|
RU2505447C2 |
| СПОСОБ СТАБИЛИЗАЦИИ КРУТЯЩЕГО МОМЕНТА В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601509C1 |
| ГИБРИДНАЯ ЭЛЕКТРИЧЕСКАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2490161C2 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2015 |
|
RU2621530C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВЫКЛЮЧЕНИЕМ АВТОМАТИЧЕСКОГО ГЛАВНОГО СЦЕПЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2496668C2 |
| ШАРОКОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2014 |
|
RU2581806C1 |
| СТАБИЛИЗАТОР КРУТЯЩЕГО МОМЕНТА | 2012 |
|
RU2491177C1 |








Изобретение относится к машиностроению и может быть использовано в качестве привода автомобиля, тягача, робота. Сферомобиль состоит из несущей рамы, двигателя трансмиссии и колес, установленных на взаимно перпендикулярные оси или валы, приводящие последние во вращение. Каждое колесо выполнено в виде двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой малый установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси. Каждый полусферический сегмент снабжен приводами: одним для его вращения, другим для контролируемого поворота последнего. Усеченный сегмент снабжен приводом и в вертикальном положении может быть приведен во вращение на малом сегменте вокруг их общей оси. Поворот колес возможен как одновременно на всех колесах, так или на правых, или на левых колесах под любым углом от горизонтального положения до вертикального с возможностью фиксированной остановки в этом положении и от вертикального во внутреннюю сторону несущей рамы сферомобиля. Достигается повышение проходимости, расширение диапазона регулировки крутящего момента на ободе приводного колеса и повышение маневренности. 13 ил.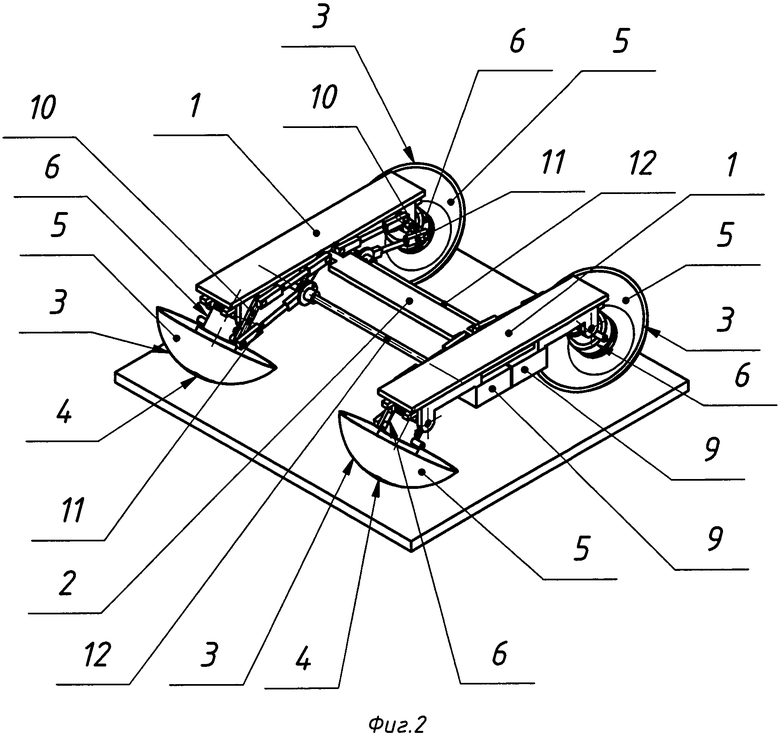
Сферомобиль, состоящий из несущей рамы, двигателя трансмиссии и не менее двух или более колес, установленных на взаимно перпендикулярные оси или валы, приводящие последние во вращение, причем колеса выполнены в виде полусферических сегментов одного радиуса, и каждый полусферический сегмент снабжен приводами: одним для его вращения, другим для контролируемого поворота последнего, причем поворот колес возможен как одновременно на всех колесах, так или на правых, или на левых колесах под любым углом от горизонтального положения до вертикального с возможностью фиксированной остановки в этом положении и от вертикального во внутреннюю сторону несущей рамы сферомобиля, отличающийся тем, что каждое колесо выполнено в виде двух последовательно соединенных сферических сегментов - один из которых усеченный, а другой малый установлен на его усеченную часть соосно с ним, с возможностью свободного вращения вокруг их общей оси, причем усеченный сегмент снабжен приводом и в вертикальном положении может быть приведен во вращение на малом сегменте вокруг их общей оси.
| КЛЕЩЕВОЙ ЗАХВАТ | 0 |
|
SU206063A1 |
| JP 2000142154 A, 23.05.2000 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕКЛЮЧЕНИЯ СВЯЗИ С СИСТЕМЫ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ НА АЛЬТЕРНАТИВНУЮ СИСТЕМУ С ПОМОЩЬЮ МОБИЛЬНОГО БЛОКА | 1996 |
|
RU2172558C2 |
| Устройство для регулирования центрального наддува | 1936 |
|
SU51072A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛОПОЛИМЕРНОГО ИЛИ БИПОЛИМЕРНОГО ИЗДЕЛИЯ | 2011 |
|
RU2473423C2 |
| US 4785899 A, 22.11.1988 | |||

