Изобретение относится к способам автоматической посадки летательного аппарата в сложных метеорологических условиях и может быть использовано для автоматической посадки как пилотируемого, так и беспилотного летательного аппарата.
Известно, что из всех режимов полета летательных аппаратов наиболее сложным и напряженным является режим захода на посадку и непосредственно процесс посадки. Время захода на посадку и непосредственно посадка летательного аппарата занимает не более 1-2% всего времени полета, однако на этот режим приходится более 50% всех авиационных происшествий. Трудности посадки особенно возрастают при сложных метеорологических условиях - плохой видимости или, в некоторых случаях, при ярком солнечном освещении, когда зрительное ориентирование затруднено или невозможно, и при сильном ветре, поэтому актуальной проблемой в настоящее время является необходимость обеспечения безопасной посадки летательных аппаратов как пилотируемых, так и беспилотных.
Широко известны способы посадки летательных аппаратов с помощью механических систем, но при отсутствии аппаратуры автоматической посадки увеличивается риск падения из-за ошибок оператора. Способ посадки беспилотного летательного аппарата на парашюте ограниченно применим, поскольку парашют в свернутом положении занимает до 40% полезного объема летательного аппарата.
Для решения задач точной посадки летательного аппарата наиболее перспективно применять автоматический способ посадки.
В этом случае бортовая система управления должна решать задачи планирования действий, оценки текущего состояния и управления исполнительными органами. При этом система управления автоматической посадкой летательного аппарата должна обеспечивать устойчивость, малое время отработки больших отклонений, адаптивность к воздействию сложных метеорологических условий и точность выхода в заданную точку приземления.
Так, известен способ посадки летательного аппарата в заданную точку взлетно-посадочной полосы (ВПП), включающий определение его высоты и дальности до расчетной точки касания (РТК), формирование сигнала по этим данным и управление исполнительными органами летательного аппарата по сформированному сигналу (Радиотехнические комплексы навигации, посадки и УВД палубной авиации. - Обзор, 1978, с. 50-54).
Однако этот способ не обеспечивает достаточной точности посадки и не может быть применим при посадке в сложных метеорологических условиях.
Известен также способ автоматической посадки летательного аппарата, включающий измерение скорости его полета, высоты полета, горизонтальной дальности до конечной точки траектории снижения и отклонения от вертикальной плоскости, проходящей через ось взлетно-посадочной полосы, определение вертикальной составляющей скорости полета, формирование управляющего сигнала по результатам измерений и подачу его на исполнительные органы, при этом для повышения точности посадки в сложных метеорологических условиях дополнительно формируют сигналы, пропорциональные требуемым вертикальным составляющим скорости и ускорения в момент приземления, суммируют их с основным управляющим сигналом, пропорциональным высоте полета, и полученный сигнал подают на исполнительные органы самолета (а.с. № 289027, B64C 13/50, 1968).
Однако известный способ не обеспечивает требуемой точности посадки в сложных метеорологических условиях за счет того, что управляющий сигнал формируется только на конечном участке траектории в зависимости от текущей высоты и дальности до РТК с учетом параметров движения только в РТК, поэтому данный способ не может использоваться для управления летательным аппаратом на всей глиссаде, начиная с момента начала снижения, а управляющее воздействие как реакция в сложных метеорологических условиях на возмущение вызывает колебательное движение самолета относительно траектории снижения вплоть до потери устойчивости при достаточно больших возмущениях
Известен также способ автоматической посадки летательного аппарата, включающий прием излучения от точечных световых маркеров, установленных на одной линии по оси ВПП на определенных расстояниях друг от друга, измерение углов между направлениями на маркеры, преобразование световых сигналов в электрические, пропорциональные измеренным углам, измерение высоты с помощью высотомера, формирование сигналов управления самолетом в вертикальной и горизонтальной плоскостях, при этом управление в горизонтальной плоскости осуществляют, минимизируя угол между направлениями на ближний и дальний маркеры, а для формирования сигналов управления самолетом в вертикальной плоскости последовательно измеряют углы между направлениями на соседние маркеры и высоту самолета над первым из них по ходу полета (заявка Японии №56-112398, B64D 45/08, 1981).
Однако в сложных метеорологических условиях или при ярком солнечном освещении способ оказывается неработоспособным, так как на этапе выравнивания при приземлении летательного аппарата возможна потеря видимости маркеров, что не позволяет осуществить автоматическое управление посадкой до точки касания ВВП, при этом - в случае выхода из строя одного или нескольких маркеров, нарушается процесс определения положения самолета относительно ВПП, что снижает точность и безопасность посадки, а применение высокоточного высотомера малых высот усложняет систему и существенно увеличивает ее стоимость.
Наиболее близким по технической сущности и достигаемому результату является способ автоматической посадки летательного аппарата, включающий измерение скорости его полета, высоты полета, горизонтальной дальности до конечной точки траектории снижения и отклонения от вертикальной плоскости, проходящей через ось взлетно-посадочной полосы, определение вертикальной составляющей скорости полета, формирование управляющего сигнала по результатам измерений и подачу его на исполнительные органы, при этом предварительно задают горизонтальную дальность от начальной точки траектории снижения до ее конечной точки, а также параметры движения летательного аппарата в конечной точке траектории снижения, включающие высоту полета, отклонение от вертикальной плоскости, проходящей через ось взлетно-посадочной полосы, горизонтальную, вертикальную и поперечную составляющие скорости полета самолета, вторую производную по времени и производные по времени последующих порядков высоты, горизонтальной дальности до конечной точки траектории снижения и отклонения от вертикальной плоскости, проходящей через ось взлетно-посадочной полосы, максимальные отклонения самолета от заданной траектории, и при отклонении его от заданной траектории, большем максимального отклонения, формируют новую траекторию, относительно которой управляют летательным аппаратом (патент №2025414 от 07.08.1992).
Однако этот способ контролирует управление движением летательного аппарата только по прямолинейной глиссаде и отклонение его от заранее заданной жесткой траектории, что приводит к возникновению колебательного процесса при отработке возмущений и, соответственно, к уменьшению точности посадки, особенно в сложных метеорологических условиях. Кроме того, изменение высоты полета зависит от вертикальной составляющей скорости, а контролировать этот параметр при использовании указанного способа невозможно, вследствие этого обеспечить безопасность, надежность и точность посадки летательного аппарата в автоматическом режиме с применением указанного способа обеспечить невозможно.
В основу настоящего изобретения положена задача обеспечить надежность, безопасность посадки в автоматическом режиме летательного аппарата, в том числе беспилотного, в сложных метеорологических условиях, вплоть до полного отсутствия видимости взлетно-посадочной полосы, а, при ярком солнечном освещении, с возможностью приземления с высокой точностью, что, в свою очередь, позволит повысить вероятность успешной посадки и, соответственно, снизить число повторных заходов на посадку.
Технический результат решается таким образом, что по способу автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, включающему измерение скорости его полета, высоты полета, горизонтальной дальности до конечной точки траектории снижения и отклонения от вертикальной плоскости, проходящей через осевую линию взлетно-посадочной полосы, определение вертикальной составляющей скорости полета, при этом предварительно задают горизонтальную дальность от начальной точки траектории снижения до ее конечной точки, параметры движения летательного аппарата в конечной точке траектории снижения, отличающегося тем, что производят определение углов тангажа, углов крена и вертикальной составляющей скорости летательного аппарата,
при этом значения углов тангажа θ рассчитывают в зависимости от разности расстояний ΔRy, определяемых по времени распространения сигналов Δt от продольно расположенных на взлетно-посадочной полосе приемопередатчиков, отраженных от фюзеляжа летательного аппарата, по формуле:
θ=arctg(±(ΔRy/Rx)),
где ΔRy=CΔt, где C - скорость распространения радиоволн в свободном пространстве;
Rx - интервал расстояния между приемопередатчиками по оси x;
значения углов крена у рассчитывают в зависимости от разности расстояний 

где 
Rz - интервал расстояния между приемопередатчиками по оси z,
а значения вертикальной составляющей скорости Vr летательного аппарата рассчитывают по формуле:
Vr=VΔRy/Rx,
при этом полученные расчетные данные вертикальной составляющей скорости обновляются через интервал времени: Δt=Rx/V, далее каждые последующие значения расчетных данных сравнивают с предыдущими и, в случае отклонения значения, подают команды на органы управления летательного аппарата (о его положении) в соответствии с этим отклонением.
Кроме того, по способу автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, летательный аппарат должен быть оборудован антенной и приемником сигнала наземного центра управления посадкой, а также оснащен оборудованием режима автоматической посадки по командам оператора.
Кроме того, по способу автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, приемопередающие устройства представляют собой радиорелейные станции РЛС, работающие в 3 мм диапазоне длины волны.
Кроме того, по способу автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного приемопередающие устройства устанавливают на взлетно-посадочной полосе с шагом не более проекции габаритов летательного аппарата на взлетно-посадочную полосу.
Кроме того, по способу автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, при превышении максимальных отклонений летательного аппарата по высоте от заданной траектории ΔHymax и при выполнении условия ΔRy>ΔHymax формируют новую опорную траекторию исходя из значений координат и параметров движения летательного аппарата в точке, в которой выполняется указанное условие.
Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, поясняется следующими иллюстрациями:
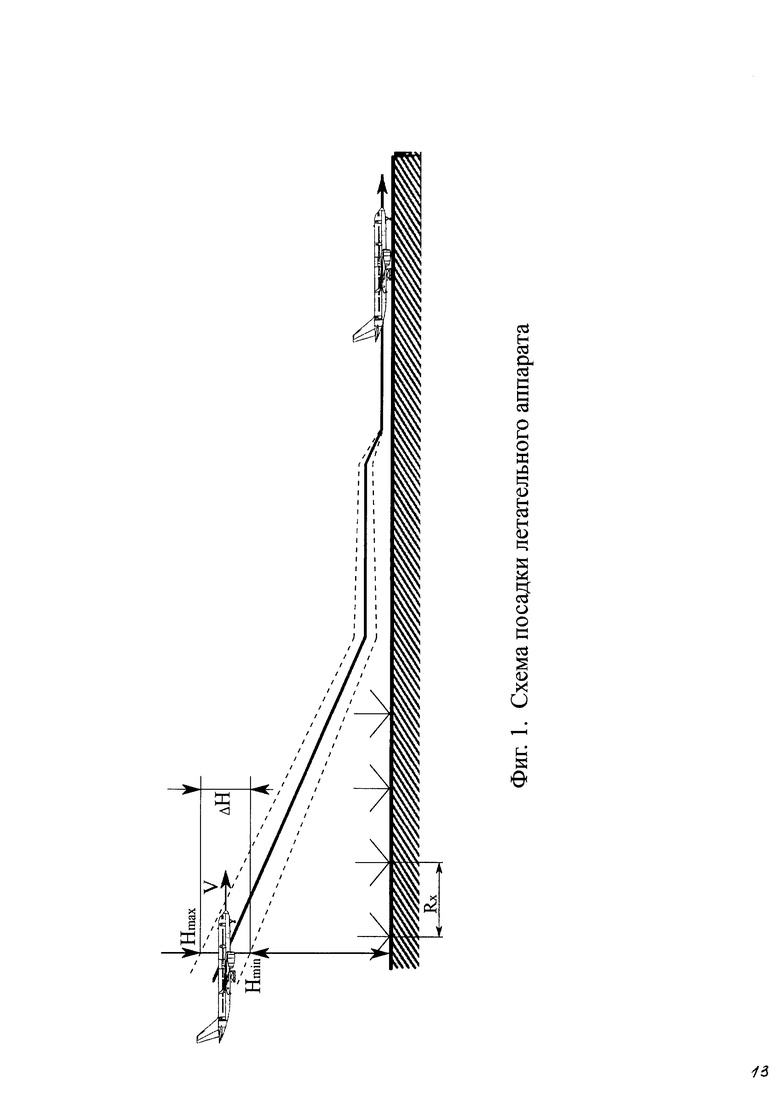
на фиг. 1 представлена схема посадки летательного аппарата;
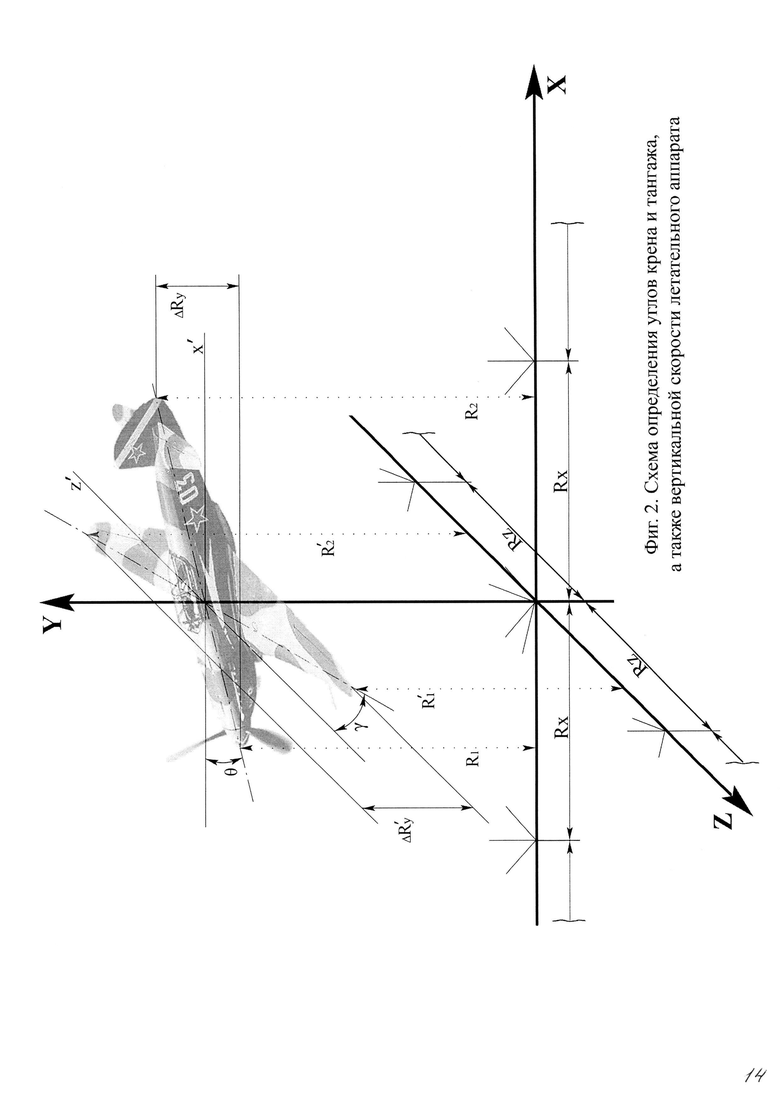
на фиг. 2 представлена схема определения углов крена, тангажа и вертикальной скорости летательного аппарата.
Схема посадки летательного аппарата показана на фиг. 1, где V - скорость летательного аппарата на высоте принятия решения захода на посадку, Hmax и Hmin - соответственно максимально и минимально допустимые высоты полета на глиссаде; Rx - расстояние между двумя соседними приемопередатчиками; ΔH - интервал между максимальной и минимальной высотой полета на глиссаде, который в процессе посадки уменьшается и в точке ВПП равен нулю.
Воздушная часть посадки летательного аппарата длится порядка 6-10 секунд и включает:
- парашютирование - часть посадки, которая начинается при уменьшении подъемной силы крыла и характеризуется ростом вертикальной скорости;
- выравнивание - часть посадки, во время которой вертикальная скорость снижения на глиссаде практически уменьшается до нуля; начинается на высоте 8-10 м и завершается переходом к выдерживанию на высоте 0,5-1 м;
- выдерживание - часть посадки, во время которой продолжается дальнейшее плавное снижение аппарата с одновременным уменьшением скорости и увеличением угла атаки до значений, при которых возможно приземление и пробег;
- приземление - контакт летательного аппарата с земной поверхностью.
При этом для каждого класса летательного аппарата значения скорости и высота захода на посадку различны. Так, например, для самолета класса ТУ-154 (массой 90-100 т) начало этапа посадки лежит в пределах 25-30 метров, высота начала выравнивания самолета - в пределах 8-10 метров, скорость самолета при заходе на посадку - в пределах 250-260 км/ч, посадочная скорость - 190-200 км/ч, пробег - 2000 м. Для легкомоторных летательных аппаратов класса TL-2000 Sting (массой 0,6-0,7 т) эти значения будут следующими: 9-10 метров, 3-4 метра, 80-100 км/ч, V2 - 60-65 км/ч, 300 м (данные из ТТХ летательных аппаратов и справочной литературы).
Летательный аппарат до высоты принятия решения о посадке выполняет маневры по глиссаде. В сложных метеорологических условиях, при невозможности управления посадкой летательного аппарата в ручном режиме и для беспилотных летательных аппаратов, посадка должна происходить в автоматическом режиме и полет осуществляют по командам, поступающим с Земли.
Из научно-технической литературы известно, что заход на посадку летательного аппарата осуществляется по стандартной отработанной глиссаде - прямолинейной траектории движения летательного аппарата с определенным для каждого типа летательного аппарата углом наклона (Лигум Т.И. Аэродинамика самолета Ту-134. М.: 1987, рис. 9.2, стр. 117). Это обеспечивает летательному аппарату плавное, скользящее приземление и существенно уменьшает динамическую нагрузку на шасси в момент касания взлетной полосы.
На аэродромах глиссада задается при помощи двух радиомаяков - глиссадного и курсового, которые посылают в направлении заходящего на посадку летательного аппарата радиолучи, обозначающие границы глиссады в наклонно-горизонтальной и вертикальной плоскостях.
Летательный аппарат начинает снижаться по глиссаде с высоты 200-400 м (данные для Ту-134), высота глиссады над взлетно-посадочной полосой составляет 15 м. При отклонении траектории снижения самолета от глиссады больше допустимого пилот обязан прекратить снижение и набрать высоту для повторного захода на посадку. При этом вертикальная скорость на последнем этапе посадки не должна превышать значения Vr≤1.5 м/с (Лигум Т.И. Аэродинамика самолета Ту-134. М.: 1987, стр. 122).
Схема посадки летательного аппарата подробно описана Стрелковым В.В. и Уткиным Е.Е. в пособии "Выбор угла наклона посадочной глиссады транспортного самолета" //Ученые записки ЦАГИ. Выпуск №3-4 / том XXXVI/2005.
На фиг. 2 представлена схема расчета значений углов крена и тангажа, а также вертикальной составляющей скорости летательного аппарата.
Тангаж - угловое движение летательного аппарата относительно главной (горизонтальной) поперечной оси инерции. Угол тангажа считается положительным, если самолет набирает высоту (кабрирование), отрицательным - если снижается (пикирование). Угол изменяется посредством рулей высоты или любых иных управляющих поверхностей, заменяющих РВ. Угол тангажа влияет на составляющую подъемной силы, уравновешивающую вес самолета.
Крен летательного аппарата - поворот судна вокруг его продольной оси. Крен осуществляют с помощью элеронов или любых иных частей, выполняющих функции элеронов. В расчетах принято считать положительным крен против часовой стрелки. Ограничения значений углов крена и тангажа рассчитывают для каждого типа летательных аппаратов исходя из их конструкции, прочности, аэродинамики, скорости и в соответствии с нормативными документами ИКАО.
На фиг. 2 угол тангажа летательного аппарата обозначен θ, угол крена летательного аппарата - γ, Vr - вертикальная составляющая скорость летательного аппарата.
Углы тангажа, крена летательного аппарата и вертикальной скорости по заявляемому изобретению рассчитывают по формулам:
θ=arctg(±(ΔRy/Rx)),
где ΔRy=CΔt - разность расстояний, определяемая временем распространения сигналов Δt от продольно расположенных приемопередатчиков на взлетно-посадочной высоте, отраженных от фюзеляжа летательного аппарата, C - скорость распространения радиоволн в свободном пространстве, Rx - интервал расстояния между приемопередатчиками по оси x;

где 
а значения вертикальной составляющей скорости летательного аппарата определяют по формуле:
Vr=VΔRy/Rx,
при этом полученные расчетные данные обновляются через интервал времени: Δt=Rx/V.
Приемопередающие устройства представляют собой радиорелейные станции, работающие в 3 мм диапазоне длины волны. В качестве таких датчиков могут быть использованы, например, мини РЛС 3-мм диапазона длин волн, обеспечивающие всепогодный мониторинг взаимного расположения летательного аппарата относительно земной поверхности. Такие приемопередающие устройства производит, например, ОАО «НПП «Радар ммс» (г. Санкт-Петербург). Из литературных источников известно, что на высоте 30 м ширина их луча составляет менее 1 м (Никольский В.В. Антенны. М.: «Связь». 1966).
Применение РЛС 3 мм диапазона волн, используемого приемопередатчиками ВПП в настоящее время вызывает большой интерес, особенно при сложных метеорологических условиях, в условиях тумана и задымленности, яркого солнечного освещения, так как он реализует существенно большую угловую разрешающую способность при нормальном функционировании.
Информацию о положении летательного аппарата и скорости снижения в заявляемом изобретении определяют шагом расположения приемопередатчиков, что в совокупности с высокой точностью определения высоты (менее 0,2 м) дает возможность безаварийно проводить посадку любого летательного аппарата, в том числе беспилотного.
Практически способ осуществляется следующим образом.
Предположим, что у летательного аппарата возникает крен влево или вправо. Тогда элероны отклоняются в сторону компенсации крена.
При посадке самолета максимально возможные углы крена и тангажа, при которых возможна стабилизация положения самолета, определяют в соответствии с формулами:
γ=arccos (±(K/Rz)), θ=arccos(±(L/Rx)),
где K - размах крыла самолета,
L - длина корпуса самолета.
Использование заявляемого изобретения позволяет избежать выхода на большие углы рассогласования текущих и заданных параметров движения, поскольку отработка рассогласований осуществляется с малым шагом.
При реализации заявляемого способа изменение параметров движения летательного аппарата в сложных метеорологических условиях, а также вследствие резкого изменения погодных условий (шквал, сдвиг ветра) приводит к формированию команд управления, не выводящих летательный аппарат на прежнюю траекторию, а обеспечивающих его движение по новой траектории того же функционального вида, при этом конкретный вид этой траектории определяется параметрами движения самолета в данной точке и в точке касания. В результате этого исключаются или значительно уменьшаются колебательные движения самолета относительно траектории снижения, уменьшается время отработки возмущения и, следовательно, увеличиваются вероятность безопасной посадки и точность посадки.
При этом известно, что автоматическое управление посадкой обладает большим быстродействием, так как исключается человеческий фактор, что повышает безопасность посадки при неблагоприятных погодных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПОСАДКЕ | 2018 |
|
RU2708785C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ МОНИТОРИНГА ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2012 |
|
RU2503936C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
Изобретение относится к способам автоматической посадки летательного аппарата (ЛА). Для автоматической посадки ЛА в сложных метеорологических условиях задают горизонтальную дальность от начальной точки траектории снижения до ее конечной точки, параметры движения ЛА в конечной точке траектории снижения, измеряют скорость и высоту полета, горизонтальную дальность до конечной точки траектории снижения, отклонение от вертикальной плоскости осевой линии взлетно-посадочной полосы, вертикальную составляющую скорости полета, производят определение углов тангажа, крена и вертикальной составляющей скорости ЛА определенным образом, в зависимости от разности расстояний, определяемых по времени распространения сигналов от расположенных определенным образом приемопередатчиков через определенный интервал времени, подают команды на органы управления ЛА в случае отклонения значения, полученного путем сравнения последующих и предыдущих расчетных данных по вертикальной составляющей скорости ЛА. Обеспечивается безопасность посадки ЛА в сложных метеорологических условиях. 4 з.п. ф-лы, 2 ил. 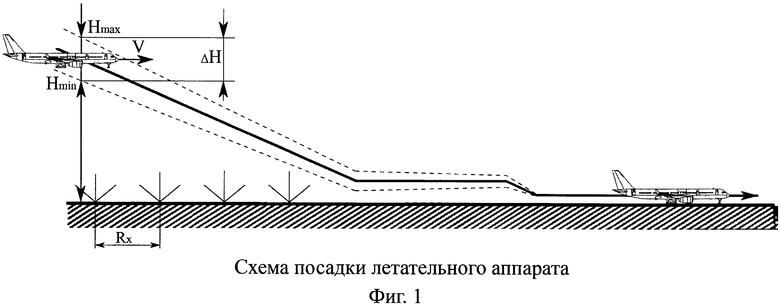
1. Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного, включающий измерение скорости его полета, высоты полета, горизонтальной дальности до конечной точки траектории снижения и отклонения от вертикальной плоскости, проходящей через осевую линию взлетно-посадочной полосы, определение вертикальной составляющей скорости полета, при этом предварительно задают горизонтальную дальность от начальной точки траектории снижения до ее конечной точки, параметры движения летательного аппарата в конечной точке траектории снижения, отличающийся тем, что производят определение углов тангажа, углов крена и вертикальной составляющей скорости летательного аппарата, при этом значения углов тангажа θ рассчитывают в зависимости от разности расстояний ΔRy, определяемых по времени распространения сигналов Δt от продольно расположенных на взлетно-посадочной полосе приемопередатчиков, отраженных от фюзеляжа летательного аппарата, по формуле:
θ=arctg(±(ΔRy/Rx)),
где ΔRy=CΔt, где С - скорость распространения радиоволн в свободном пространстве;
Rx - расстояние между приемопередатчиками по оси х;
значения углов крена γ рассчитывают в зависимости от разности расстояний  определяемых по времени распространения сигналов
определяемых по времени распространения сигналов  от поперечно расположенных на взлетно-осадочной полосе приемопередатчиков, отраженных от крыла самолета, по формуле:
от поперечно расположенных на взлетно-осадочной полосе приемопередатчиков, отраженных от крыла самолета, по формуле:

где  , где С - скорость распространения радиоволн в свободном пространстве;
, где С - скорость распространения радиоволн в свободном пространстве;
Rz - расстояние между приемопередатчиками по оси z,
а значения вертикальной составляющей скорости Vr летательного аппарата рассчитывают по формуле:
Vr=VΔRy/Rx,
при этом полученные расчетные данные по вертикальной составляющей скорости летательного аппарата обновляются через интервал времени Δt=Rx/V, далее каждые последующие значения расчетных данных сравнивают с предыдущими и, в случае отклонения значения, подают команды на органы управления летательного аппарата о его положении в соответствии с этим отклонением.
2. Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного по п. 1, отличающийся тем, что летательный аппарат оборудован антенной и приемником сигнала наземного центра управления посадкой, а также оснащен оборудованием режима автоматической посадки по командам оператора.
3. Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного по п. 1, отличающийся тем, что приемопередающие устройства представляют собой радиорелейные станции, работающие в 3 мм диапазоне длины волны.
4. Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного по п. 1, отличающийся тем, что приемопередающие устройства устанавливают на взлетно-посадочной полосе с шагом не более проекции габаритов летательного аппарата на посадочную полосу.
5. Способ автоматической посадки летательного аппарата в сложных метеорологических условиях, в том числе беспилотного по п. 1, отличающийся тем, что при превышении максимальных отклонений летательного аппарата по высоте от заданной траектории ΔHymax и при выполнении условия ΔRy>ΔHymax формируют новую опорную траекторию, исходя из значений координат и параметров движения летательного аппарата в точке, в которой выполняется указанное условие.
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 1992 |
|
RU2025414C1 |
| Способ контроля и корректировки угла глиссады воздушного судна относительно точки приземления | 1991 |
|
SU1804628A3 |
| US 5208601 А1, 04.05.1993 | |||
| US 8659471 В1, 25.02.2014. | |||

