ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Область настоящего изобретения относится к автоматизированному устройству для сердечно-легочной реанимации, которое можно использовать для замены ручной сердечно-легочной реанимации и конкретно компрессионных сжатий грудной клетки.
УРОВЕНЬ ТЕХНИКИ
Внезапная остановка сердца (ВОС) является одной из основных причин смертности в западном мире. В результате ишемия всего организма после ВОС нарушает широкий спектр клеточных процессов, что приводит к серьезным повреждениям и гибели клеток, если не доступна срочная медицинская помощь. Сообщается, что вероятность выживания после внезапной остановки сердца линейно уменьшается на 3-7% в минуту в течение времени остановки.
Сердечно-легочная реанимация (СЛР) может быть выполнена во всех случаях, когда пациент испытывает внезапную остановку сердца. Процедура состоит, не ограничиваясь, из выполнения применяемых к грудине пациента регулярных и ритмических компрессионных сжатий грудной клетки со скоростью около 100 надавливаний в минуту. Успешная СЛР требует, чтобы давление прикладывалось к грудной клетке. Может быть очень трудно совершать одинаковые, высокого качества ручные компрессионные сжатия грудной клетки с соответствующим давлением. Поскольку СЛР является ключевой для выживания, было разработано механическое автоматизированное устройство СЛР (АСЛР) для замены менее надежной, часто прерываемой, трудно контролируемой и иногда необходимой в течение длительных периодов времени ручной СЛР. Травма у пациента (травма передней стенки, повреждение органа, сломанный мечевидный отросток и т.д.), вызванная СЛР, может быть неизбежным, специфическим, негативным сопутствующим фактором выживания после реанимации.
На рынке представлены различные автоматизированные устройства СЛР. Первый тип устройств СЛР использует технологии, такие как пневматика, для приведения в движение компрессионного цилиндра с манжетой к грудной клетке пациента. Другой тип автоматизированной СЛР использует электрический привод и широкий пояс вокруг грудной клетки пациента, который ритмично сжимается, для выполнения компрессионного сжатия грудной клетки. Частота надавливаний точно устанавливается и управляется, так что может быть достигнуто высокое качество компрессионных сжатий грудной клетки. В настоящее время автоматизированные СЛР (АСЛР) системы, такие как Michigan instruments Thumper/Live-Stat™ (патент США № 6,171,267), LUCAS™ Devices (опубликованная заявка на патент США № 2004/0230140 Al), Autopuls Device® (Zoll® Medical, патент США № 6,066,106) и устройство фирмы Laerdal (опубликованная заявка на патент США № 2008/0119766 Al) представлены или будут представлены на рынке, который быстро растет по мере того, как лица, осуществляющие уход за больными, осознают их важность. Важные проблемы для современных устройств состоят в долгом периоде подготовки к работе, низком уровне стабильности во время работы устройства, а также предположения и клинические данные, указывающие на то, что для обеспечения оптимальных рабочих характеристик применяется недостаточная сила. Место на груди, где происходят компрессионные сжатия грудной клетки, может быть ключом к успеху СЛР и значимо для ограничения травм. Идеальное средне-боковое положение легко найти, так как грудная клетка симметрична относительно средней плоскости. Однако кранио-каудальное положение трудно найти, особенно при настройке АСЛР устройства, потому что изначально подушка находится далеко от грудной клетки, что делает точное прицеливание трудным. Прицеливание еще более нарушается, поскольку подушка СЛР находится в другом месте по сравнению с рукоятками на устройстве.
Существуют различные представления об идеальном месте для компрессионных сжатий грудной клетки при ручной СЛР. Все согласны с тем, что СЛР должна совершаться в середине средне-боковой плоскости (ссылка на руководство AHA 2005). Есть некоторые различия при кранио-каудальном направлении. Во-первых, имеется правило 1/3-2/3, когда нужно оценить размер грудины пациента (рукоятка и корпус без учета мечевидного отростка). Идеальная точка надавливания находится на 1/3 этого расстояния, измеренного от каудальной области. Этот способ рекомендуется в руководстве по СЛР 2000 года. При втором способе рука должна быть расположена в пространстве толщиной в два пальца между рукой и углублением внизу грудной клетки. При третьем способе рекомендуется, чтобы точка надавливания была на высоте сосковой линии. Руководство по СЛР 2005 года рекомендует размещение ладони руки «на середине грудной клетки» и предоставляет спасателю выбор точного места надавливания. Предполагается, что этот последний способ является более быстрым и потому лучшим, поскольку он связан с меньшей потерей времени. Все способы до определенной степени соответствуют друг другу: краниального/высокого нажатия на грудину избегают, потому что очень большие силы должны быть приложены в этом месте, глубина надавливания мала для соответствующих сил, и высоко число случаев переломов грудины. Избегают слишком низкого нажатия на грудину и таким образом избегают нажатия на мечевидный отросток, которое вызывает травму, что может в свою очередь привести к повреждению желудка, селезенки или печени.
Что касается одного из известных устройств СЛР, предполагается, что надавливающая подушка находится на высоте сосковой линии. Известное устройство АСЛР состоит из спинодержателя, к которому должна быть присоединена надавливающая подушка (и любая вспомогательная конструкция для надавливающей подушки, в зависимости от обстоятельств). Спинодержатель подкладывается под пациента, и пациент накрывает спинодержатель, часто почти полностью. Таким образом, очень трудно видеть, совпадает ли середина спинодержателя сосковой линией. Надавливающий блок прилегает только с одной стороны к спинодержателю, так что передвижение невозможно в кранио-каудальном направлении по отношению к спинодержателю. Для регулировки кранио-каудального положения надавливающей подушки и надавливающего блока спинодержатель должен быть повторно отрегулирован, в то время как он находится под пациентом, что является сложной и длительной процедурой, так как лопатки пациента препятствуют движению спинодержателя. Также трудно оценить правильную точку надавливания, потому что точка надавливания находится на расстоянии от спинодержателя, особенно для больших пациентов, из-за обхвата пациента. В процессе крепления устройства АСЛР к пациенту сердечно-легочная реанимация не может выполняться ни вручную, ни автоматически. Этот период называют отсутствием потокового времени, потому что в это время никакого кровотока у пациента не может быть индуцировано. Длительная процедура прикрепления означает, что отсутствие кровотока будет длиться дольше, чем хотелось бы. Кроме того, во время СЛР, как известно, подушка смещается. Если это так, пользователь должен по меньшей мере быть в состоянии определить, остается ли подушка на месте во время процедуры СЛР или она сдвинулась так, что пользователь может исправить положение надавливающей подушки.
Другое известное устройство АСЛР обеспечивает базу отсчета на спинодержателе. Спинодержатель этого известного устройства АСЛР предназначен для размещения таким образом, что подмышки располагаются близко к опорной линии. Однако наиболее распространенный способ применения спинодержателя (подъем грудной клетки пациента вверх и сдвиг держателя под пациента с верхней стороны) делает выравнивание очень трудным, так как пациент и спинодержатель находятся под (разными) углами, видимость базы отсчета плохая, и обращаться с толстым спинодержателем трудно, спинодержатель можно сдвинуть по отношению к пациенту и определение подмышки нечетко. Кроме того, этот вид автоматизированного устройства для сердечно-легочной реанимации использует пояс во время СЛР вместо надавливающей подушки. Этот пояс широкий, что делает возможным превышение воздействия на печень, селезенку или мечевидный отросток. Кроме того, трудно видеть, расположен ли пояс перпендикулярно спинодержателю. Эта проблема не является прямым вопросом наведения, но связана с ним, так как небольшие сдвиги пояса, которые, как известно, происходят регулярно, могут увеличить эту проблему.
Для медицинских устройств визуализации, которые имеют лишь очень отдаленное отношение к автоматизированным устройствам для сердечно-легочной реанимации, как может быть известно, используют оптические системы наведения. Например, опубликованная заявка на патент США № 2006/0018438 Al раскрывает систему и способ для наведения на объект в медицинских устройствах визуализации. Другая оптическая система наведения и способ наведения для радиографической рентгеновской визуализации раскрыт в опубликованной заявке на патент США № 2009/0190722 Al.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Существует потребность в создании автоматизированного устройства для сердечно-легочной реанимации, которое позволяет решить проблему неизвестности местоположения надавливающей подушки во время применения устройства АСЛР и во время проводимой реанимации. Кроме того, или в качестве альтернативы, было бы желательно ограничить время, которое требуется для наведения надавливающего устройства на правильные места у пациента. Другой дополнительной или альтернативной задачей может быть уменьшение количества попыток, которые могут потребоваться для правильного размещения надавливающего блока, чтобы обеспечить как можно более короткое время «отсутствия потока». Кроме того, или в качестве альтернативы, может быть желательно обнаруживать любые смещения устройства АСЛР во время СЛР, которые могут привести к надавливаниям в неоптимальной точке надавливания.
Для того чтобы решить по меньшей мере одну из этих задач и/или другие задачи, автоматизированное устройство для сердечно-легочной реанимации содержит надавливающий элемент для воздействия на место надавливания на груди пациента и средство оптического наведения, выполненное и скомпонованное с возможностью проецирования оптического изображения на пациента, по меньшей мере временного.
Оптическое изображение, спроецированное посредством средства оптического наведения, направляет пользователя в течение процедуры размещения устройства АСЛР. Например, оптическое изображение может позволить пользователю оценить место надавливания, на которое он или она нацеливаются. Пользователь может связать оптическое изображение с анатомическими ориентирами для того, чтобы направить автоматизированное устройство для сердечно-легочной реанимации или надавливающий элемент к оптимальному по существу месту надавливания. Помимо анатомических ориентиров, положение рук спасателя, проводящего основные реанимационные мероприятия (ОРМ), может быть использовано в качестве опорного. Тот факт, что оптическое изображение проецируется на пациента (что не исключает возможности проецирования оптического изображения куда-либо, кроме пациента), обеспечивает хорошую видимость с тех углов зрения, которыми пользователь может располагать при размещении автоматизированного устройства для сердечно-легочной реанимации. Оптическое изображение, спроецированное посредством средства оптического наведения, также может позволить пользователю отслеживать, не сместилось ли положение автоматизированного устройства для сердечно-легочной реанимации во время проведения СЛР.
Представляется, что не существует общедоступного описания автоматизированного устройства для сердечно-легочной реанимации, имеющего систему оптического наведения.
В одном аспекте изобретения оптическое изображение может быть выполнено и скомпоновано с возможностью обеспечения пеленга на намеченное место надавливания в течение по меньшей мере части процедуры размещения автоматизированного устройства для сердечно-легочной реанимации.
Пеленг на намеченную точку надавливания может прямо указывать на намеченное место надавливания с помощью специального индикатора, который является частью оптического изображения, но это не является необходимым. Оптическое изображение может указывать на намеченное место надавливания, что может быть полезно, так как иногда намеченное место надавливания скрыто под надавливающим элементом по меньшей мере на последнем этапе процедуры прикрепления. Понятие пеленга, например, может быть истолковано как система наведения, которая помогает пользователю наводить на нужное место надавливания, добиваясь совмещения намечаемого места надавливания с нужным местом надавливания.
В другом аспекте изобретения средство оптического наведения может быть выполнено и скомпоновано с возможностью находиться в заданном относительном положении по отношению к надавливающему элементу в течение по меньшей мере части процедуры размещения автоматизированного устройства для сердечно-легочной реанимации. Заданное относительное положение средства оптического наведения и надавливающих элементов позволяет пользователю надежно и воспроизводимо использовать средство оптического наведения в качестве реперной точки для надавливающего элемента и места надавливания. Заданное относительное положение может содержать относительное положение средства наведения по отношению к надавливающему элементу и/или ориентацию средства оптического наведения по отношению к надавливающему элементу.
В другом аспекте изобретения оптическое изображение может содержать линию, проходящую, по существу, в средне-боковом направлении по грудной клетке пациента. Таким образом, линия света указывает на определенное кранио-каудальное положение на грудной клетке пациента. Эта временная линия рисуется (на грудной клетке) в средне-боковом направлении с помощью средства оптического наведения и двигается вместе с автоматизированным устройством для сердечно-легочной реанимации так, что до, во время и/или после применения устройства (намеченная) точка надавливания на грудной клетке очевидна. Во время сердечно-легочной реанимации линия может показать, находится ли точка надавливания по-прежнему в опорной точке (ориентир на грудной клетке), которая нужна спасателю. Линия может быть включена/выключена в течение определенных промежутков времени в течение СЛР.
В дополнительном аспекте изобретения оптическое изображение может содержать перекрестие для того, чтобы гарантировать центрирование пациента в спинодержателе. Перекрестие может содержать первую линию, проходящую, по существу, в средне-боковом направлении и вторую линию, проходящую, по существу, в кранио-каудальном направлении.
Было бы желательно, чтобы средство оптического наведения было маленьким и производило четкое оптическое изображение, которое хорошо видно спасателю в разнообразных условиях. По меньшей мере одна из этих задач и/или возможные другие задачи решаются с помощью средства оптического наведения, содержащего лазерный источник. Лазерный источник, как правило, способен производить монохроматический свет, который сфокусирован в одном пучке. Именно поэтому он подходит для получения аккуратного и ясного оптического изображения на грудной клетке пациента. Оптическое изображение может быть получено из лазерного пучка с помощью специальных линз, зеркал или других оптических элементов. Также возможно производить оптическое изображение с помощью движущейся линзы, движущегося зеркала или движущейся призмы. Еще одна возможность заключается в использовании специальных отверстий или дифракционных решеток. Все эти средства для создания оптического изображения могут быть обобщены под термином «формирователь изображения».
В одном аспекте настоящего изобретения автоматизированное устройство для сердечно-легочной реанимации дополнительно может содержать портальную раму, удерживающую надавливающий элемент и средство оптического наведения.
В дополнительном аспекте предмета, описанного в настоящем документе, средство наведения может содержать по меньшей мере два источника света, расположенных по обе стороны надавливающего элемента. Два источника света могут быть расположены по обе стороны надавливающих элементов по отношению к средне-боковому направлению. Наличие двух источников света делает возможной установку с обеих сторон пациента потому, что по существу никакая часть оптического изображения не может быть заблокирована частью надавливающей подушки и/или пациента. Портальная рама может быть опрокинута по отношению к спинодержателю, и два источника света проецируют составное оптическое изображение на грудную клетку пациента, которое видно с обеих сторон пациента, также как из угловых краниального и каудального положений.
Было бы желательно, чтобы спасатель мог отслеживать, останавливается ли надавливающий элемент на желаемом месте надавливания при размещении устройства сердечно-легочной реанимации. Эта задача и/или возможные другие задачи решаются с помощью автоматизированного устройства для сердечно-легочной реанимации, дополнительно содержащего спинодержатель. Портальная рама может быть выполнена с возможностью прикрепляться к спинодержателю по меньшей мере в двух различных положениях, разнесенных друг от друга в кранио-каудальном направлении. При наличии спинодержателя, спинодержатель может сначала быть помещен под пациентом и затем портальная рама может быть выдвинута к грудной клетке пациента сверху, т.е. по существу в перпендикулярном направлении по отношению к грудной клетке пациента. Таким образом, кранио-каудальное положение надавливающего элемента остается по существу постоянным в течение соответствующего этапа своего размещения. Кранио-каудальное положение надавливающего элемента может быть скорректировано, поскольку портальная рама прикрепляется к спинодержателю по меньшей мере в двух различных положениях. Это можно обеспечить для множества положений вдоль кранио-каудальных направлений или обеспечить механизм прикрепления, который позволяет непрерывное позиционирование портальной рамы по отношению к спинодержателю в кранио-каудальном направлении.
Спинодержатель может содержать фиксирующую направляющую, и портальная рама может быть выполнена с возможностью крепления к фиксирующей направляющей во множестве положений вдоль кранио-каудального направления. Сочетание спинодержателя и средства оптического наведения делает возможным быстрое и правильное размещение. Это происходит потому, что надавливающий блок может быть размещен в различных местах на фиксирующей направляющей. В соответствии с одним из аспектов автоматизированного устройства для сердечно-легочной реанимации направляющая может быть длиннее, чем надавливающий блок.
Было бы желательно, чтобы оптическое изображение было хорошо видно в любых обстоятельствах, даже в условиях яркого солнечного света. Эта проблема и/или возможные другие проблемы решаются с помощью проекции света содержащей длины волн между 440 нм и 570 нм и предпочтительно между 530 нм и 560 нм. Указанный диапазон длин волн существенно покрывает область от синей видимой части спектра до зеленой видимой части спектра, который обеспечивает хороший контраст со всеми возможными цветами кожи человека и, следовательно, как ожидается, будет хорошо виден. Можно использовать, например, лазеры на парах меди (510,5 нм), Ar+(514,5 нм), Nd:YAG (532 нм), Xe3+(539,5 нм), He-Ne (543,5 нм) или полупроводниковые лазеры. Длина волны также может быть между двумя этими раскрытыми примерными длинами волн.
Эти и другие аспекты настоящего изобретения будут очевидны и проиллюстрированы со ссылкой на описанный(е) ниже вариант(ы) осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
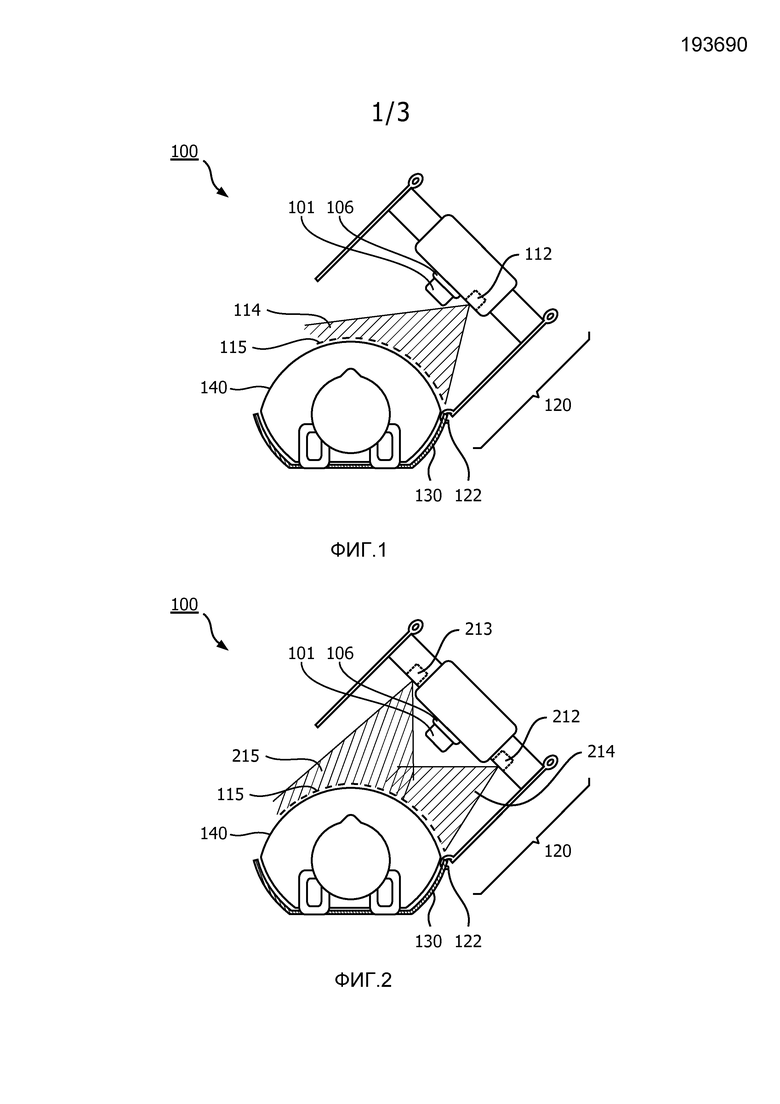
На Фиг. 1 представлен вид спереди автоматизированного устройства для сердечно-легочной реанимации.
На Фиг. 2 представлен вид спереди альтернативного варианта автоматизированного устройства для сердечно-легочной реанимации.
На Фиг. 3 представлен вид спереди автоматизированного устройства для сердечно-легочной реанимации с Фиг. 2 в положении готовности к работе.
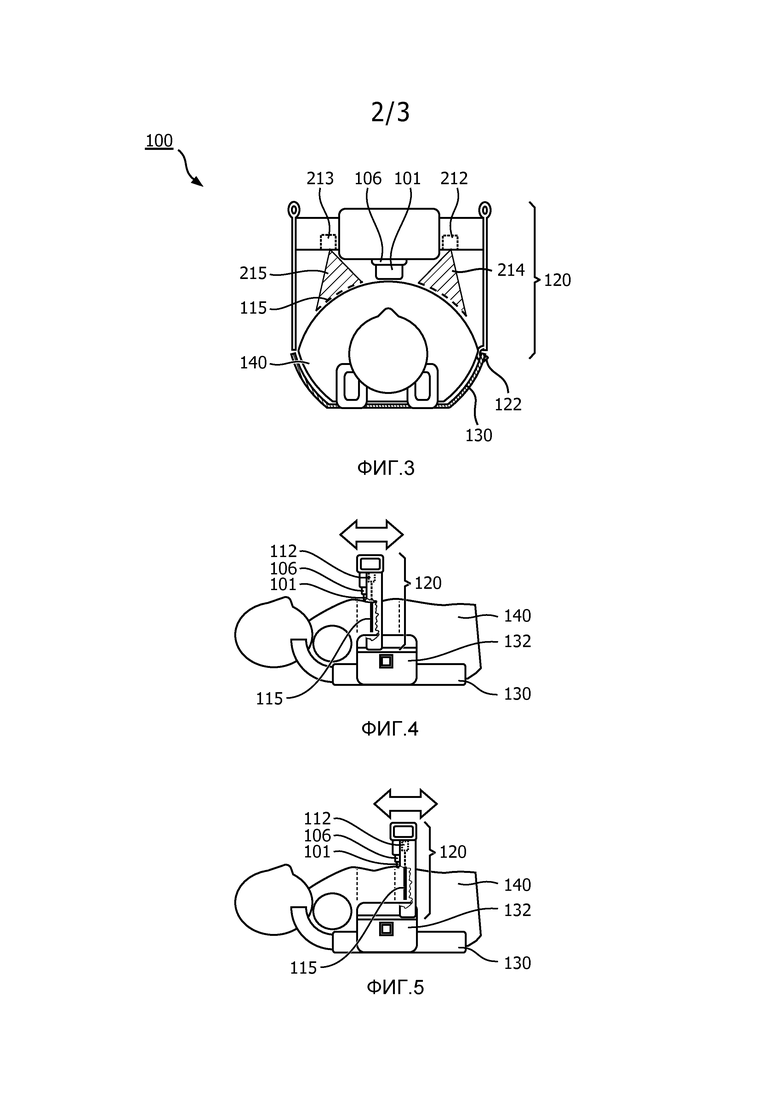
На Фиг. 4 и 5 представлены возможные конфигурации устройства АСЛР.
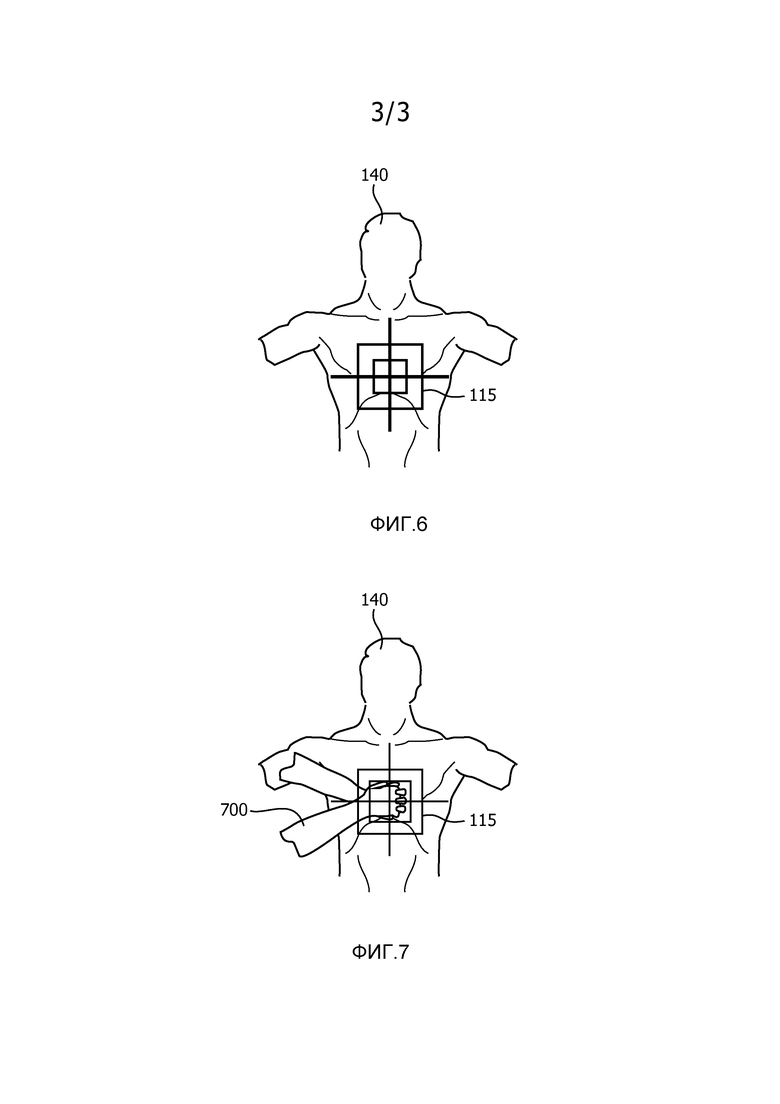
На Фиг. 6 представлено примерное оптическое изображение, проецируемое на грудную клетку пациента.
На Фиг. 7 показано примерное оптическое изображение по отношению к рукам спасателя, проводящего основные реанимационные мероприятия (ОРМ).
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 представлено автоматизированное устройство 100 сердечно-легочной реанимации (АСЛР), в соответствии с идеями, описываемыми в настоящем документе. Устройство АСЛР 100 показано на переднем плане, во время процедур размещения среди устройств АСЛР 100 на пациенте 140. Устройство 100 АСЛР содержит надавливающий элемент 101, который выполнен и скомпонован с возможностью приложения механической силы к грудной клетке пациента 140, предпочтительно к грудине пациента контролируемым, но по-прежнему действенным способом. Надавливающий элемент 101 перемещается вверх и вниз, когда устройство 100 АСЛР устанавливается на пациента 140 и пациента укладывают на спину. Движение надавливающего элемента 101 обеспечивается приводом 106, который схематически показан на Фиг. 1 и других фигурах, сопровождающих это описание. Привод монтируется на, или внутри, портальной рамы 120. Портальная рама 120 выполнена и скомпонована с возможностью крепления к спинодержателю 130 с помощью соединений 122, такими как петли, защелки или тому подобное. Портальная рама120 может быть отсоединяемой от спинодержателя 130. Таким образом, пациент 140 может сначала быть размещен на спинодержателе и положение пациента 140 по отношению к спинодержателю 130 может быть тщательно отрегулировано. Например, верхнюю часть тела пациента можно поддержать и затем спинодержатель 130 может быть помещен под спину пациента и, по существу, сохраняется в этом положении, пока лежащего на спине пациента 140 тянули на его/ее спине.
Устройство 100 АСЛР дополнительно содержит средство 112 оптического наведения. В варианте осуществления, представленном на Фиг. 1, средство 112 оптического наведения располагается в центральной части траверсы портальной рамы 120. Средство 112 оптического наведения находится рядом с надавливающим элементом 101 и приводом 106. Средство 112 оптического наведения выполнено и скомпоновано с возможностью проецирования оптического изображения 115 на пациента. С этой целью средство 112 оптического наведения производит световое излучение 114, которое имеет, например, четко определенные границы, позволяющие пользователю точно оценить место оптического изображения 115 по отношению к грудной клетке пациента 140. Например, пользователь может сравнить оптическое изображение 115 с анатомическим ориентиром на грудной клетке пациента, таким как соски, грудина (если видны), подмышки, и т.п. Другой опорной точкой может быть положение руки спасателя при ОРМ (см. Фиг. 7). Оптическое изображение 115 может указывать намеченное место надавливания, в котором надавливающий элемент 101 вероятно должен остановиться, и, следовательно, применить механическую силу к грудной клетке пациента. Средство 112 оптического наведения и надавливающий элемент двигаются по существу вместе, так как портальная рама 120 установлена на спинодержателе 130. Таким образом, оптическое изображение, проецируемое средством 112 оптического наведения, помогает пользователю в поиске хорошей позиции портальной рамы 120 по отношению к спинодержателю 130 при размещении устройства 100 АСЛР. Следует отметить, что оптическое изображение 115 не обязательно должно присутствовать в намеченном месте надавливания, потому что достаточно того, чтобы пользователь мог оценить намеченное место надавливания с достаточной точностью.
Оптическое изображение 115 может быть временно сгенерировано средством 112 оптического наведения во время размещения устройства 100 АСЛР. Средство 112 оптического наведения может быть приведено в действие пользователем через элемент управления (не показано), таким как кнопка или переключатель. Другой вариант автоматического приведения в действие - включение питания устройства АСЛР. Дополнительно может содержаться проверка автоматизированного движения посредством приведения в действие оптического изображения в течение определенного процента времени (например, 10 секунд каждые 5 минут). Эти различные варианты приведения в действие средства оптического наведения могут быть объединены любым образом.
Средство 112 оптического наведения может содержать источник света и оптические элементы для создания оптического изображения, например линзы, маски, или отверстия. Также можно использовать лазерный источник в качестве источника света и обеспечивать перемещения оптических элементов, таких как зеркала, линзы или призмы для динамического отклонения лазерного пучка, производимого лазерным источником. С помощью сканирования лазерным пучком, зависящим от времени образом, можно создавать оптическое изображение 115, которое воспринимается как устойчивое оптическое изображение для человеческого глаза благодаря быстроте сканирующего лазерного пучка. Например, лазерный пучок может отклоняться с помощью вращающегося зеркала так, что кажется, что линия проецируется на грудную клетку пациента. Средство 112 оптического наведения может содержать множество источников света и/или устройств создания оптического изображения для произведения более сложных оптических изображений 115. Возможная реализация автоматизированного устройства для сердечно-легочной реанимации согласно идеям, описываемым в настоящем документе, содержит полупроводниковый лазер в качестве источника света и дифракционный элемент, как устройство для создания оптического изображения.
В варианте осуществления, представленном на Фиг. 1, портальная рама 120 опрокидывается к спинодержателю 130 посредством поворота портальной рамы вокруг соединения 122, которое действует как шарнир. Таким образом, оптическое изображение 115 двигается справа налево при размещении портальной рамы. Обратите внимание, что оптическое изображение 115 остается, по существу, на своем месте в кранио-каудальном направлении при поворотном движении портальной рамы 120. Как упомянуто выше, нахождение правильного положения в средне-боковом направлении (т.е. направление влево-вправо на Фиг. 1) сравнительно легко осуществить. Как правило, пациент 140, по существу, помещается в центре спинодержателя 130 и, благодаря соединениям 122, портальная рама 120, также, по существу, помещается в центре по отношению к пациенту 140 в средне-боковом направлении.
На Фиг. 2 представлен другой вариант осуществления автоматизированного устройства 100 для сердечно-легочной реанимации в соответствии с идеями, описанными в настоящем документе. Устройство 100 АСЛР, представленное на Фиг. 2, отличается от устройства АСЛР, представленного на Фиг. 1, в том, что средство оптического наведения состоит из двух блоков 212, 213. Два блока 212, 213 средства оптического наведения расположены внутри, или на двух боковых частях траверсы портальной рамы 120. Два блока 212, 213 средства оптического наведения альтернативно могут быть расположены в центральной части траверсы портальной рамы 120. Два блока 212, 213 генерируют световые излучения 214, 215, которые совместно образуют оптическое изображение 115, когда проецируются на грудную клетку пациента 140. Что касается двухблокового средства 212, 213 оптического наведения, оптическое изображение 115 может охватывать большую площадь на грудной клетке пациента. В частности, левая сторона пациента здесь лучше охватывается оптическим изображением 115, чем в варианте осуществления, представленном на Фиг. 1. Обратите внимание, что там, где световое излучение 114, 214 или 215 следует, по существу, в тангенциальном направлении по отношению к кривизне грудной клетки пациента 140, оптическое изображение 115 может стать слабым и менее различимым, чем там, где световое излучение попадает на грудную клетку под углом, более близким к прямому. Также может быть предусмотрено перемещение блоков 212, 213 средства оптического наведения дальше по траверсе портальной рамы 120 или размещение их на, или внутри, боковых стоек или опор портальной рамы 120.
На Фиг. 3 представлен вариант осуществления устройства 100 АСЛР с Фиг. 2 в рабочей конфигурации, т.е. портальная рама доведена до конечного положения, в котором она тщательно сцепляется со спинодержателем. Траверса портальной рамы 120 имеет, по существу, горизонтальную ориентацию. Надавливающий элемент 101 близок к грудной клетке пациента 140 и может даже коснуться ее. Блокировка портальной рамы 120 по отношению к спинодержателю 130 может быть достигнута за счет защелок на левой стороне и/или правой стороне в непосредственной близости от соединения 122. Защелки или другие средства блокировки портальной рамы 120 по отношению к спинодержателю 130 не представлены на Фиг. 3.
Два блока 212, 213 средства оптического наведения здесь производят отдельные оптические изображения 215 на каждой стороне надавливающего элемента 101.
Оптическое изображение 215, проецируемое на обе стороны надавливающего элемента 101, позволяет пользователю оценить положение надавливающего элемента 101 по отношению к определенным анатомическим ориентирам. Пользователь может регулировать положение портальной рамы 120 в кранио-каудальном направлении на основе оценки. Например, пользователь мог бы определить, что хорошим местом надавливания было бы место в 1 см от сосковой линии в каудальном направлении. Несмотря на то, будет ли намеченное место надавливания заслонено надавливающим элементом 101 на последнем этапе поворотного движения портальной рамы 120, оптическое изображение 215 будет по-прежнему видимо, и поэтому будут видны соски. Пользователь может завершить поворотное движение портальной рамы 120 и затем сдвигать портальную раму в кранио-каудальном направлении до тех пор, пока оптическое изображение не укажет, что место надавливания находится точно в 1 см от сосковой линии в каудальном направлении. Пользователь, может затем зафиксировать относительное положение портальной рамы 120 и спинодержателя 130 с помощью соответствующего фиксирующего устройства, такого как защелки, хомутовые соединения, резьбовые соединения, фрикционные муфты, или другие виды соединений.
На Фиг. 4 представлено, как портальная рама 120 соединена со спинодержателем 130 с помощью направляющей 132. На Фиг. 4 портальная рама расположена по существу в левом положении по отношению к направляющей 132, т.е. почти в наиболее краниальном положении, в которое может быть перемещена портальная рама 120. Пользователь теперь может заметить, что оптическое изображение 115, произведенное средством 112 оптического наведения, как представляется, находится в положении, которое хорошо подходит для места надавливания. Таким образом, пользователь может решить заблокировать портальную раму 120 по отношению к направляющей 132, так что никакого дальнейшего относительного движения портальной рамы 120 не может возникнуть в кранио-каудальном направлении или в передне-заднем направлении (так же как поворота вокруг соединения 122, как показано на Фиг. 1-3).
На Фиг. 5 представлена конфигурация, аналогичная той, что на Фиг. 4, но с портальной рамой 120, размещенной в крайнем каудальном положении. Когда пользователь отмечает, что оптическое изображение слишком далеко смещено от подходящего места надавливания в каудальном направлении, пользователь может решить сдвинуть портальную раму 120 обратно в краниальном направлении. Портальная рама 120 может быть заблокирована направляющей 132 в любом положении между крайним краниальным положением и крайним каудальным положением. В альтернативном варианте осуществления может быть предусмотрено предоставление множества дискретных запирающих положений.
На Фиг. 6 представлена верхняя часть тела пациента 140 с примерным оптическим изображением 115, проецируемом на его грудную клетку. Оптическое изображение 115 содержит горизонтальную линию, которая указывает положение намеченного места надавливания в кранио-каудальном направлении. Оптическое изображение 115 также содержит вертикальную линию, которая может помочь пользователю центрировать устройство 100 АСЛР по отношению к средне-боковому направлению. Примерное оптическое изображение 115 дополнительно содержит два квадрата с общим центром, которые центрированы по отношению к намеченному месту надавливания. Когда надавливающий элемент 101 уже относительно близок к грудной клетке пациента 140, оптическое изображение 115 может быть загорожено или заслонено надавливающим элементом 101. Во время этого этапа квадраты могут обеспечить некоторую степень ориентации для пользователя. Например, пользователь может наблюдать, движутся ли вершины квадрата относительно определенных анатомических ориентиров. Определенная степень движения является нормальный, потому что квадраты (также как и все оптическое изображение 115) имеют тенденцию сокращаться по мере того, как портальная рама приближается к 120 грудной клетке пациента 140. Тем не менее пользователь должны быть в состоянии обнаружить любое нежелательное перемещение портальной рамы 120 и исправить его во время поворота портальной рамы 120. Как указано выше, тонкие настройки в кранио-каудальном направлении могут выполняться один раз, когда портальная рама находится в горизонтальном положении.
Для ряда практических применений устройства АСЛР будет достаточно простой линии, проведенной в средне-боковом направлении, для оказания помощи пользователю в надлежащем размещении устройства 100 АСЛР.
Фиг. 7 подобна Фиг. 6 с той разницей, что на ней также показаны руки спасателя при ОРМ. Положение рук спасателя при ОРМ может служить ориентиром при размещении устройств АСЛР. Спасатель при ОРМ может быть в состоянии чувствовать лучшее положение, например, при выполнении ряда ручных надавливаний до размещения устройств АСЛР.
Хотя настоящее изобретение было описано в отношении упомянутых вариантов осуществления, оно не ограничивается конкретным вариантом, изложенным в настоящем документе. Точнее, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. В формуле изобретения термин «содержит» не исключает других элементов или этапов. Кроме того, хотя отдельные признаки могут быть включены в различные пункты формулы изобретения, возможно, они могут быть с достижением преимущества объединены и их включение в различные пункты формулы изобретения не означает, что сочетание признаков не представляется возможным и/или обеспечивающим преимущество. Кроме того, упоминание единственного числа не исключает множественного числа. Так, упоминание форм единственного числа, термины «первый», «второй» и т.п. не исключают множественного числа. Кроме того, ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие объем.
Изобретение относится к медицинской технике. Автоматизированное устройство для сердечно-легочной реанимации содержит надавливающий элемент для воздействия на место надавливания на грудной клетке пациента, работающий от привода, средство оптического наведения, выполненное с возможностью проецирования оптического изображения на пациента, и портальную раму для удержания надавливающего элемента и средства оптического наведения. Портальная рама содержит траверсу, а средство оптического наведения размещено на траверсе смежно с надавливающим элементом и приводом. Изобретение позволяет определять местоположение надавливающего элемента во время работы устройства и ограничивать время наведения на место воздействия. 9 з.п. ф-лы, 7 ил.
1. Автоматизированное устройство для сердечно-легочной реанимации, содержащее:
надавливающий элемент для воздействия на место надавливания на грудной клетке пациента, причем надавливающий элемент может приводиться в движение посредством привода, и
средство оптического наведения, выполненное с возможностью по меньшей мере временного проецирования оптического изображения на пациента; и
портальную раму для удержания надавливающего элемента и средства оптического наведения, причем портальная рама содержит траверсу; отличающееся тем, что средство оптического наведения находится на траверсе смежно с надавливающим элементом и приводом.
2. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором оптическое изображение выполнено с возможностью указания на намеченное место надавливания в течение по меньшей мере части процедуры размещения автоматизированного устройства для сердечно-легочной реанимации.
3. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором средство оптического наведения выполнено с возможностью нахождения в заданном относительном положении по отношению к надавливающему элементу в течение по меньшей мере части процедуры размещения автоматизированного устройства для сердечно-легочной реанимации.
4. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором оптическое изображение содержит линию, проходящую по существу в средне-боковом направлении по грудной клетке пациента.
5. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором оптическое изображение содержит перекрестие.
6. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором средство оптического наведения содержит лазерный источник.
7. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором средство оптического наведения содержит по меньшей мере два источника света, расположенные по обе стороны надавливающего элемента.
8. Автоматизированное устройство для сердечно-легочной реанимации по п. 6, дополнительно содержащее спинодержатель, при этом портальная рама выполнена с возможностью крепления к спинодержателю по меньшей мере в двух различных положениях, удаленных друг от друга в кранио-каудальном направлении.
9. Автоматизированное устройство для сердечно-легочной реанимации по п. 8, в котором спинодержатель содержит фиксирующую направляющую и при этом портальная рама выполнена с возможностью крепления к фиксирующей направляющей во множестве положений вдоль кранио-каудального направления.
10. Автоматизированное устройство для сердечно-легочной реанимации по п. 1, в котором средство оптического наведения производит световое излучение с длиной волны между 440 нм и 570 нм и предпочтительно между 530 нм и 560 нм.
| CN 201073418 Y, 18.06.2008 | |||
| US 5823185 A, 20.10.1998 | |||
| US 4082090 A, 04.04.1978 | |||
| УСТРОЙСТВО ДЛЯ СЖАТИЯ ГРУДНОЙ КЛЕТКИ ПРИ ОСТАНОВКЕ СЕРДЦА (ВАРИАНТЫ) | 1996 |
|
RU2194488C2 |
| УСТРОЙСТВО ЗАКРЫТОГО МАССАЖА СЕРДЦА | 1993 |
|
RU2097012C1 |

