Заявляемые технические решения относятся к области радиолокации и могут быть использованы для определения дальности до постановщика помех (ПП).
Большие проблемы работе радиолокационных станций (РЛС) создают импульсные помехи со структурой, близкой к структуре зондирующего сигнала. Для постановщика помех импульсная помеха является наиболее энергетически выгодной. Частным случаем импульсных помех являются синхронные ответные помехи (СОП) [Защита от радиопомех, под ред. М.В. Максимова, М., Сов. Радио, 1976 г, с. 60], которые излучаются только после приема постановщиком ответной помехи (ПОП) зондирующего сигнала, и импульсные помехи, которые излучают независимо от приема зондирующего сигнала на основе ранее разведанных параметров РЛС. В результате их действия происходят ложные обнаружения целей, так как принятые сигналы помех не отличаются по структуре от сигналов, отраженных от реальных целей. Высокая эффективность ответной помехи достигается тем, что постановщик помехи переизлучает усиленную копию зондирующего сигнала независимо от его уровня. Это при радиолокационном обзоре пространства обеспечивает ее воздействие на РЛС не только в главном луче, но и по боковым лепесткам диаграммы направленности антенны, в результате чего создается большое число ложных сигналов (отметок), неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью, в случае синхронной ответной помехи. Во всех случаях импульсы помехи воспринимаются как отраженные от целей, поэтому по ним выполняют захват и завязку трассы (С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации, с. 109) с последующим ее сбросом в случае несинхронной импульсной помехи или ведением ложной трассы, в случае синхронной ответной помехи с изменяющейся задержкой. Из этого следует, что наиболее эффективна СОП, поскольку формируемая ею ложная цель будет сопровождаться на всех интервалах дальности, в то время как ложные цели, сформированные несинхронной помехой, будут периодически сбрасываться с сопровождения.
Для повышения эффективности различных способов борьбы с ПОП (в том числе и посредством его уничтожения) важно знать дальность до него.
Из уровня техники известен способ определения дальности до постановщика помех (патент RU №2217773), основанный на приеме прямого радиоизлучения ПП и его радиоизлучения, отраженного от объекта, которое коррелировано с прямым радиоизлучением, измерении по положению максимума взаимной корреляционной функции радиоизлучений величины временного сдвига этих радиоизлучений, измерении углов места и азимута источника радиоизлучения и объекта, а также дальности до объекта, отражающего радиоизлучение, и вычислении дальности до источника излучения.
Суть способа состоит в том, что определяют время задержки между сигналом, принятым напрямую от ПП, и сигналом, принятым после отражения от объекта по максимуму значения корреляционной функции этих сигналов, и определяют угловые координаты ПП и объекта. Кроме того, в активном режиме работы РЛС определяют дальность до объекта. Полученной информации достаточно для однозначного вычисления дальности до ПП.
Недостаток известного способа определения дальности состоит в том, что он требует наличия двух излучателей - ПП и объекта, определения дальности до объекта, а также сложной аппаратуры для вычисления задержки по максимуму корреляционной функции на большом интервале задержек.
Известен наиболее близкий по технической сущности к предлагаемым способ защиты от СОП и импульсных хаотических помех, формируемых постановщиком импульсной помехи (ПИП) (Защита от помех, Максимова Н.В., Сов. Радио, 1976 г., с. 295), основанный на изменении параметров зондирующего сигнала (ЗС) в соседних периодах зондирования, вынуждающем к изменению параметров импульсов в последовательности помехи. Например, изменяют период зондирования (Защита от радиопомех, под ред. М.В. Максимова, М., Сов. Радио, 1976 г, с. 242-243, 339-341), или изменяют несущую частоту зондирующего сигнала (там же, с. 291-297).
Суть известного способа, наиболее близкого по технической сущности к предлагаемым, состоит в том, что, например, несущую частоту зондирующих сигналов изменяют от периода к периоду. Этот способ позволяет снизить эффективность ответной помехи за счет следующего. Постановщик импульсных помех до получения сигнала текущего периода излучает ответную помеху на частоте ЗС предыдущего периода, но через приемник она не проходит, поскольку прием сигналов осуществляют на измененной частоте. Только после получения ПИП сигнала с измененной частотой он начинает излучать импульсную помеху на этой частоте, приемник РЛС принимает ее и воспринимает эти сигналы, как сигналы, принимаемые на дальностях за ПИП, хотя они излучаются из одной точки, точки расположения ПИП. Поэтому на расстоянии, большем, чем дальность до ПИП, сохраняется ложное обнаружение целей.
Недостаток способа-прототипа состоит в том, что он не обеспечивает определение дальности до ПИП.
Таким образом, поставленной задачей (техническим результатом) является измерение дальности до ПИП с помощью однопозиционной РЛС.
Поставленная задача (технический результат) решается тем, что в способе определения дальности до постановщика импульсной помехи (ПИП) по первому варианту, основанному на изменении параметров зондирующего сигнала радиолокационной станции в соседних периодах зондирования, вынуждающем к изменению параметров импульсов в последовательности помехи, согласно изобретению принимают последовательность импульсов с предыдущими и измененными параметрами, измеряют интервалы времени T1=t1-(t0+Τповт) и Τ2=t2-(t0+Τповт) и приближенное значение расстояния D до ПИП вычисляют из выражения
CT1/2≤D≤CT2/2,
где t0 - момент излучения ЗС; Τповт - период повторения ЗС; C - скорость света; t1, t2 - соответственно момент обнаружения в последовательности импульсов последнего импульса с предыдущими параметрами и первого с измененными.
Поставленная задача (технический результат) решается также тем, что минимизируют интервал дальностей путем многократного определения D, при этом D определяют из выражения
CT1макс/2≤D≤CT2мин/2,
где T1макс, Т2мин - максимальное и минимальное значение соответственно Т1 и Т2, получаемое в независимые моменты времени при многократном определении D.
Поставленная задача (технический результат) по второму варианту решается тем, что в способе определения дальности до постановщика импульсной помехи (ПИП), основанном на изменении параметров зондирующего сигнала (ЗС) радиолокационной станции, вынуждающем к изменению параметров импульсов в последовательности помехи, согласно изобретению принимают с направления на ПИП последовательность импульсов помехи с предыдущими и измененными параметрами, первый обнаруженный импульс последовательности с измененными параметрами считают отраженным от ПИП и, если он не коррелирован с импульсами последовательности помехи, то по нему определяют точное значение D.
Поставленная задача (технический результат) решается также тем, что считают первый импульс с измененными параметрами не коррелированным с импульсами в последовательности помехи, если при линейном приеме и (или) приеме с ограничением его уровень ниже уровня других импульсов.
Суть способа по первому варианту заключается в следующем.
При обнаружении последовательности импульсов помехи РЛС начинает ежепериодно изменять параметры (например, частоту) ЗС. В приемнике обеспечивают прием сигналов с предыдущими и измененными параметрами. При этом измеряют интервал времени T1=t1-(t0+Τповт) и Τ2=t2-(t0+Τповт) (фиг. 1) и D определяют из выражения
CT1/2≤D≤CT2/2,
где t0 - момент излучения ЗС; Τповт - период повторения ЗС; C - скорость света; t1, t2 - моменты обнаружения в последовательности импульсов последнего с предыдущими параметрами ЗС и первого с измененными параметрами ЗС, соответственно. Если измерения проводятся многократно, то точность вычисления D повышается за счет того, что выбирают минимальное значение интервала (T1макс-Т2мин), при независимом определении T1макс и T2мин, появление которых возможно при имитации движения ложной цели.
Таким образом решается поставленная задача и достигается технический результат по первому варианту.
Суть способа по второму варианту заключается в следующем.
Известно, что для установления принадлежности импульса к одному источнику используют метод взаимной корреляции [Справочник по радиолокации т. 4, под ред. М. Скольник, М., «Сов. радио», 1970 г., с. 206, третий абзац сверху]. В импульсной последовательности первый принятый импульс (точка tпип на фиг. 1) с измененными параметрами может быть отраженным от ПИП, если он не будет коррелированным с импульсной последовательностью помехи. В качестве признака этого используют различие уровней импульсов. В линейном канале его уровень будет ниже импульсов, излученных ПИП (фиг. 1). Основанием для такого утверждения служит тот факт, что уровень помехи заведомо больше уровня импульса, отраженного от цели, так как задачей ПИП является подавление РЛС, в том числе, и за счет воздействия на нее по боковым лепесткам диаграммы направленности ее антенны. В этом случае в качестве одного из корреляционных признаков непринадлежности к импульсной последовательности помехи используют амплитудные различия импульсов при линейном приеме.
Известно, что кроме различения импульсов по амплитуде используют различение импульсов по фазовой структуре [Справочник по радиолокации т. 3, под ред. М. Скольник, М., «Сов. радио» 1970 г., с. 172-173], которое обнаруживают в импульсной последовательности помехи с отраженным сигналом от ПИП. Поэтому еще одним признаком не принадлежности к импульсной последовательности помехи являются различия в фазовой структуре импульса помехи и импульса, отраженного от ПИП. Использование этого признака основано на том, что импульс, отраженный от реальной цели (каковой является ПИП), по структуре отличается от ЗС, так как реальная цель является совокупностью блестящих точек, разнесенных в пространстве (многоточечная цель). Отражения от блестящих точек, смещенных в пространстве, накладываются друг на друга, и это приводит к искажению фазовой структуры суммарного сигнала относительно фазовой структуры ЗС. В то же время, импульсы помехи копируют ЗС, т.е. точно повторяют его структуру.
Ограничение импульсов последовательности устраняет их амплитудные различия. При этом, если уровень первого импульса с измененными параметрами относительно максимально возможного уровня сигналов после ограничения и фильтрации ниже возможного уровня сигналов на величину, определяемую допустимой вероятностью ложного обнаружения, то этот импульс считают не коррелированным с импульсной последовательностью помехи, а значит, отраженным от реальной цели, то есть от ПИП.
Амплитудные и фазовые различения в качестве не коррелированности с импульсной последовательностью помехи могут использоваться как отдельно, так и совместно. Совместное использование амплитудных и фазовых различий позволяет повысить достоверность обнаружения и точность определения дальности до ПИП.
Таким образом решается поставленная задача и достигается технический результат по второму варианту.
Комплексное использование способов по первому и второму вариантам обеспечивает достоверное решение поставленной задачи - определение дальности до ПИП.
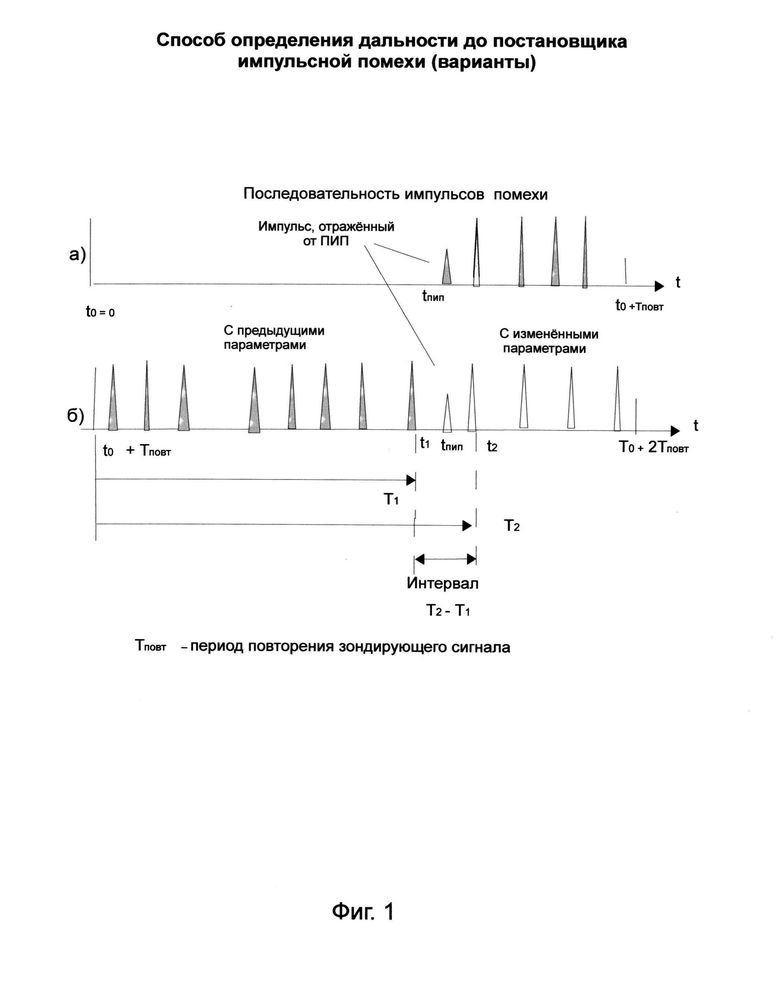
Изобретение иллюстрируется чертежом.
Фиг. 1 - диаграмма, поясняющая работу способов по первому и второму вариантам.
На диаграмме показано распределение во времени импульсных последовательностей помехи с измененными и предыдущими параметрами и импульса, отраженного от ПИП.
На фиг. 1а на временной оси показан первый период повторения зонда, в котором начинает излучать помеху ПИП после принятия ЗС в точке tпип с параметрами этого ЗС.
На фиг. 1б на временной оси показано распределение импульсов помехи с предыдущими до точки tпип и с измененными параметрами после этой точки.
В первом варианте импульс, отраженный от ПИП, не рассматривают в силу того, что он может не обнаруживаться, например, тогда, когда принимают импульсы помехи по боковым лепесткам диаграммы направленности антенны, или тогда, когда осуществляют внешнее прикрытие целей за счет работы ПИП, находящегося вне дальности действия РЛС и его уровень будет меньше уровня шумов РЛС, определяют моменты приема последнего импульса с предыдущими параметрами Τ1 и с измененными Т2 и рассчитывает приближенное значение D.
По результатам определения дальности с использованием способа по первому варианту может быть принято решение о необходимости использования способа по второму варианту. При этом проверяют первый принятый импульс с измененными параметрами в момент времени tпип на наличие или отсутствие корреляции с остальными импульсами последовательности. Если корреляция отсутствует, то его считают импульсом, отраженным от ПИП. Признаком корреляции является равенство уровней импульсов при линейном приеме и (или) при приеме с ограничением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ПРИЦЕЛЬНОЙ ПО ЧАСТОТЕ ШУМОВОЙ ПОМЕХИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582081C1 |
| Способ определения дальности до постановщика прицельной по частоте шумовой помехи | 2018 |
|
RU2681202C1 |
| Способ радиолокационного обзора пространства | 2015 |
|
RU2618675C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2582088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704001C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| Способ компенсации помех (варианты) и радиолокационная станция для его осуществления | 2018 |
|
RU2695993C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
Изобретение относится к области радиолокации и может быть использовано для определения дальности до постановщика импульсных помех (ПИП). Достигаемый технический результат - обеспечение измерения дальности до ПИП с помощью однопозиционной радиолокационной станции. Указанный результат достигается тем, что в способе определения дальности до постановщика импульсной помехи (ПИП) по первому варианту, основанном на изменении параметров зондирующего сигнала (ЗС) радиолокационной станции в соседних периодах зондирования, вынуждающем к изменению параметров импульсов в последовательности помехи, принимают последовательность импульсов с предыдущими и измененными параметрами, измеряют интервалы времени T1=t1-(t0+Τповт) и T2=t2-(t0+Τповт) и приближенное значение дальности D до ПИП вычисляют из выражения
CT1/2≤D≤CT2/2,
где t0 - момент излучения ЗС; Τповт - период повторения ЗС; C - скорость света; t1, t2 - соответственно момент обнаружения в последовательности импульсов последнего импульса с предыдущими параметрами и первого с измененными.
Указанный технический результат по второму варианту достигается тем, что в способе определения дальности до постановщика импульсной помехи (ПИП), основанном на изменении параметров зондирующего сигнала (ЗС) радиолокационной станции в соседних периодах зондирования, вынуждающем к изменению параметров импульсов в последовательности помехи, принимают с направления на ПИП последовательность импульсов помехи с предыдущими и измененными параметрами, первый обнаруженный импульс последовательности с измененными параметрами считают отраженным от ПИП и, если он не коррелирован с импульсами последовательности помехи, по нему определяют точное значение D. 2 н. и 2 з.п. ф-лы, 1 ил.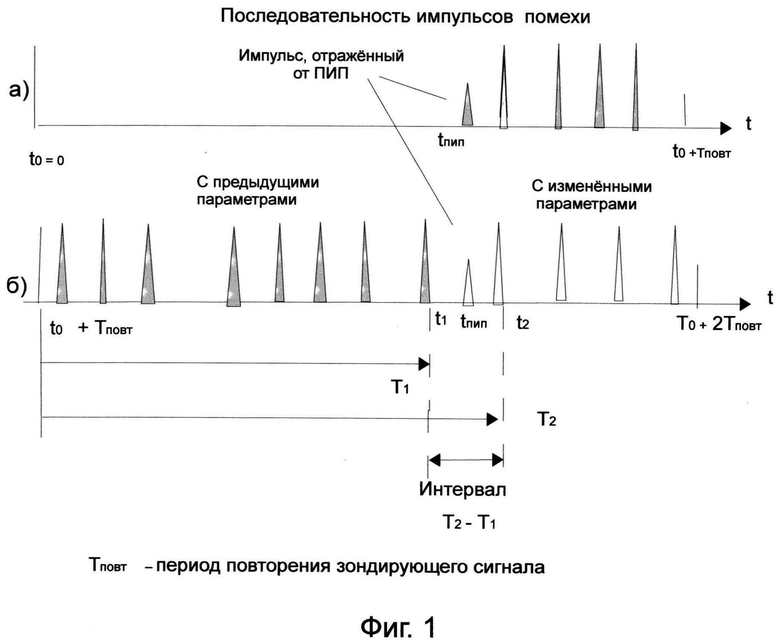
1. Способ определения дальности до постановщика импульсной помехи (ПИП), основанный на изменении параметров зондирующего сигнала (ЗС) радиолокационной станции в соседних периодах зондирования, вынуждающем к изменению параметров импульсов в последовательности помехи, отличающийся тем, что принимают последовательность импульсов с предыдущими и измененными параметрами, измеряют интервалы времени Τ1=t1-(t0+Τповт) и Τ2=t2-(t0+Τповт) и приближенное значение расстояния до ПИП D определяют из выражения
CT1/2≤D≤CT2/2,
где t0 - момент излучения ЗС; Тповт - период повторения ЗС; С - скорость света; t1, t2 - моменты обнаружения в последовательности импульсов последнего импульса с предыдущими параметрами ЗС и первого с измененными параметрами ЗС, соответственно.
2. Способ по п. 1, отличающийся тем, что минимизируют интервал дальностей путем многократного определения D, при этом D определяют из выражения
СТ1макс/2≤D≤СТ2мин/2,
где Τ1макс, Т2мин - максимальное и минимальное значения соответственно Т1 и Т2, получаемое в независимые моменты времени при многократном определении D.
3. Способ определения дальности до постановщика импульсной помехи (ПИП), основанный на изменении параметров зондирующего сигнала (ЗС) радиолокационной станции в соседних периодах зондирования, вынуждающем к изменению параметров импульсов в последовательности помехи, отличающийся тем, что принимают с направления на ПИП последовательность импульсов помехи с предыдущими и измененными параметрами, первый обнаруженный импульс последовательности с измененными параметрами считают отраженным от ПИП и, если он не коррелирован с импульсами последовательности помехи, то по нему определяют точное значение D.
4. Способ по п. 3, отличающийся тем, что считают первый импульс с измененными параметрами не коррелированным с импульсами в последовательности помехи, если при линейном приеме и(или) приеме с ограничением его уровень ниже уровня других импульсов.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2494412C2 |
| МАЛОВЫСОТНАЯ ПОМЕХОЗАЩИЩЕННАЯ РЛС | 1992 |
|
RU2038606C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ НА ФОНЕ СИЛЬНЫХ ИМПУЛЬСНЫХ ПОМЕХ В ПРИЕМНОМ КАНАЛЕ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2007 |
|
RU2334247C1 |
| US 7158077 B2, 02.01.2007 | |||
| WO 2008066537 A1, 05.06.2008 | |||
| US 7463181 B2, 09.12.2008 | |||
| JP 7333328 A, 22.12.1995. | |||

