Изобретение относится к области радиолокации и может быть использовано для распознавания синхронной ответной помехи (СОП).
Большие проблемы работе радиолокационных станций (РЛС) создают импульсные помехи со структурой, близкой к структуре зондирующего сигнала. Для постановщика помех импульсная помеха является наиболее энергетически выгодной. Частными случаями импульсных помех являются синхронные ответные помехи [Защита от радиопомех, под ред. М.В. Максимова, М.: Сов. Радио, 1976 г., с. 60], которые излучаются постановщиком ответной помехи (ПОП) только после приема зондирующего сигнала, и несинхронные импульсные помехи, которые излучает постановщик импульсной помехи независимо от приема зондирующего сигнала на основе ранее разведанных параметров РЛС. В результате их действия происходят ложные обнаружения целей, так как принятые сигналы помех не отличаются по структуре от сигналов, отраженных от целей. Высокая эффективность ответной помехи достигается тем, что постановщик помехи переизлучает усиленную копию зондирующего сигнала независимо от его уровня. Это при радиолокационном обзоре пространства обеспечивает ее воздействие на РЛС не только в главном луче, но и по боковым лепесткам диаграммы направленности антенны (ДНА), в результате чего создается большое число ложных сигналов (отметок), неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью, в случае синхронной ответной помехи. Во всех случаях импульсы помехи воспринимаются как сигналы, отраженные от целей, поэтому по ним выполняют захват и завязку трассы [С.З. Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации, М.: «Рад. и связь», 1986 г., с. 109] с последующим ее сбросом в случае несинхронной импульсной помехи или ведением ложной трассы, в случае синхронной ответной помехи с изменяющейся задержкой. Из этого следует, что наиболее эффективна СОП, поскольку формируемая ею ложная цель будет сопровождаться на всех интервалах дальности, в то время как ложные цели, сформированные несинхронной помехой, будут периодически сбрасываться с сопровождения.
Известен радиолокационный способ обзора пространства, основанный на формировании углодальностного пакета импульсов, принятых в одном интервале дальностей (стробе) [там же]. При действии несинхронной помехи моменты приема импульсов случайны, поэтому в разные периоды зондирования они попадают в разные стробы, трасса по ним не завязывается, что является признаком помехи.
Недостаток известного способа состоит в том, что он не обеспечивает распознавание синхронных ответных помех.
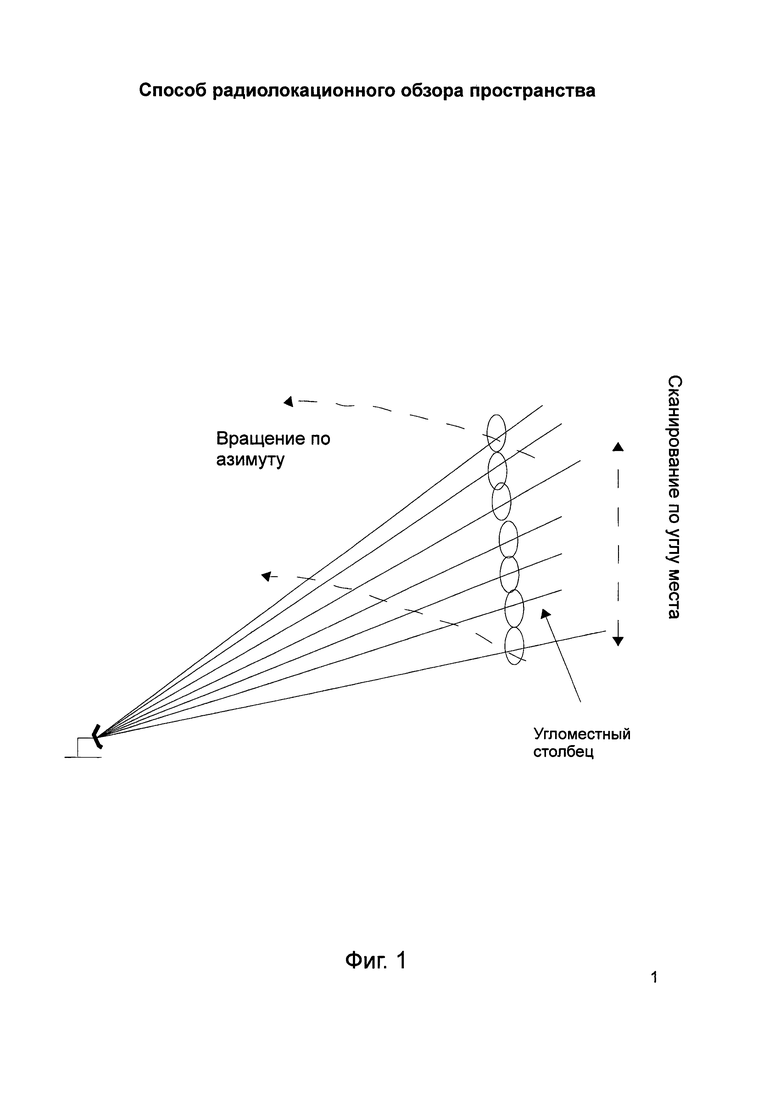
Известен наиболее близкий к заявляемому способ радиолокационного обзора пространства [Справочник по радиолокации под ред. М. Сколника, т. 4, с. 72, М.: «Сов. Радио», 1978 г.], основанный на сканировании луча ДНА в угломестной и азимутальной плоскостях и заключающийся в последовательном осмотре угловых направлений при электронном сканировании луча ДНА РЛС по углу места с одновременным вращением антенны в азимутальной плоскости, при этом образуются угломестные столбцы осмотренных направлений (фиг. 1).
Достоинство такого способа состоит в возможности трехкоординатного обзора всего пространства однопозиционной, однолучевой РЛС.
Недостаток наиболее близкого способа радиолокационного обзора пространства состоит в том, что при воздействии на РЛС в одном из угловых направлений мощных синхронных ответных помех ложные цели, формируемые ими, будут обнаруживаться сразу во всем угломестном столбце за счет приема сигналов помехи в области боковых лепестков ДНА и невозможности их подавления. Но исключить перегрузку устройств обработки и сопровождения трасс целей можно и без подавления помехи, если ее распознать.
Таким образом, поставленной задачей (техническим результатом) заявляемого способа является распознавание сигналов синхронной ответной помехи, формирующих ложные цели.
Задача решается на основе использования свойств сигналов, излученных из одной точки, определения и периодического уточнения в процессе работы параметров этих сигналов и использование их в качестве эталонов сигналов помехи.
Поставленная задача (технический результат) в способе радиолокационного обзора пространства, основанном на сканировании луча ДНА в угломестной и азимутальной плоскостях и заключающемся в последовательном осмотре угловых направлений, достигается тем, что согласно изобретению осмотр направлений под различными углами места осуществляют зондирующими сигналами с измененными параметрами, принимают решение об обнаружении ложных целей под всеми углами места на дальностях, на которых обнаружены сигналы с прежними параметрами и с измененными, принятыми в зоне, где прием отражений от целей маловероятен или невозможен.
Поставленная задача (технический результат) решается также тем, что зоной, где прием отражений от целей маловероятен или невозможен, считают зоны, расположенные за пределами прямой видимости и за максимальной дальностью действия РЛС, в области теней (полутеней) и на высотах, недостижимых для целей обнаруженного класса.
Поставленная задача (технический результат) решается также тем, что закон линейной частотной модуляции зондирующего сигнала изменяют на зеркальный.
Поставленная задача (технический результат) решается также тем, что считают ложной целью сигналы, принятые во всем угломестном столбце на дальностях, на которых обнаружены сигналы с измененными параметрами и в пределах прямой видимости, если они коррелированы с сигналами, принятыми в зоне, где прием отражений от целей маловероятен или невозможен. Поставленная задача (технический результат) решается также тем, что сигналы считают коррелированными, если принятые с одного направления сигналы на разных дальностях имеют одинаковые уровни в режиме линейного приема сигналов и в режиме приема сигналов с ограничением или равны их автокорреляционные функции.
Суть работы способа состоит в следующем.
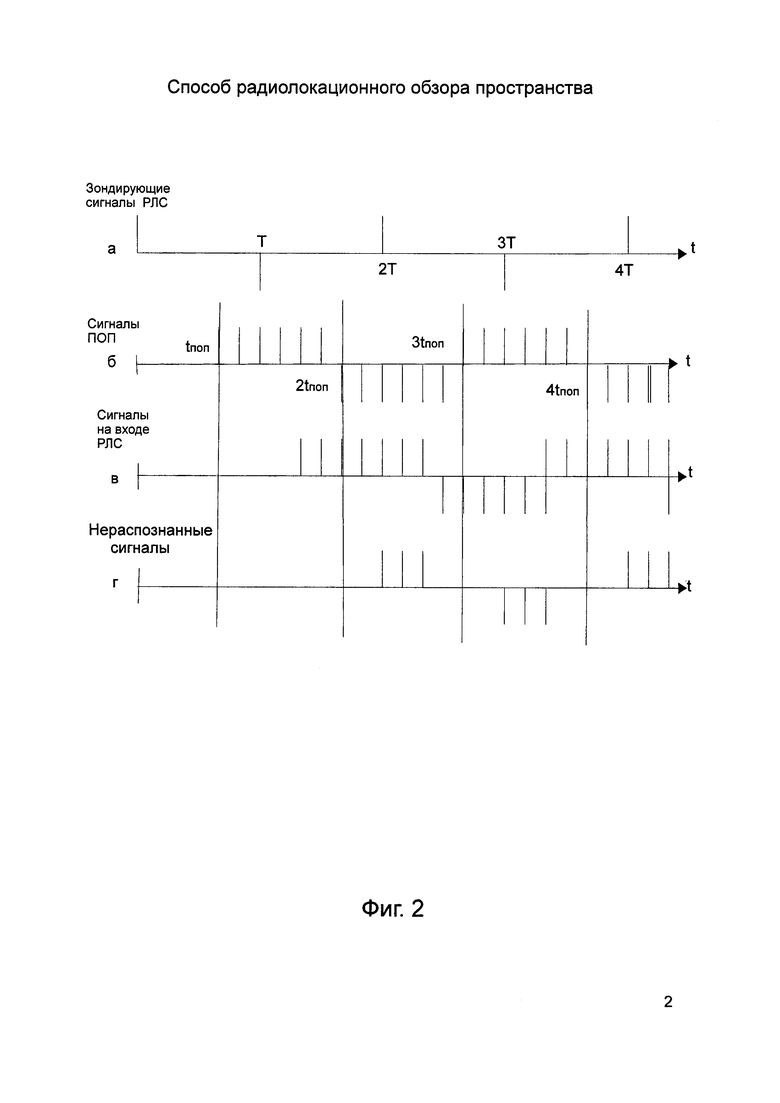
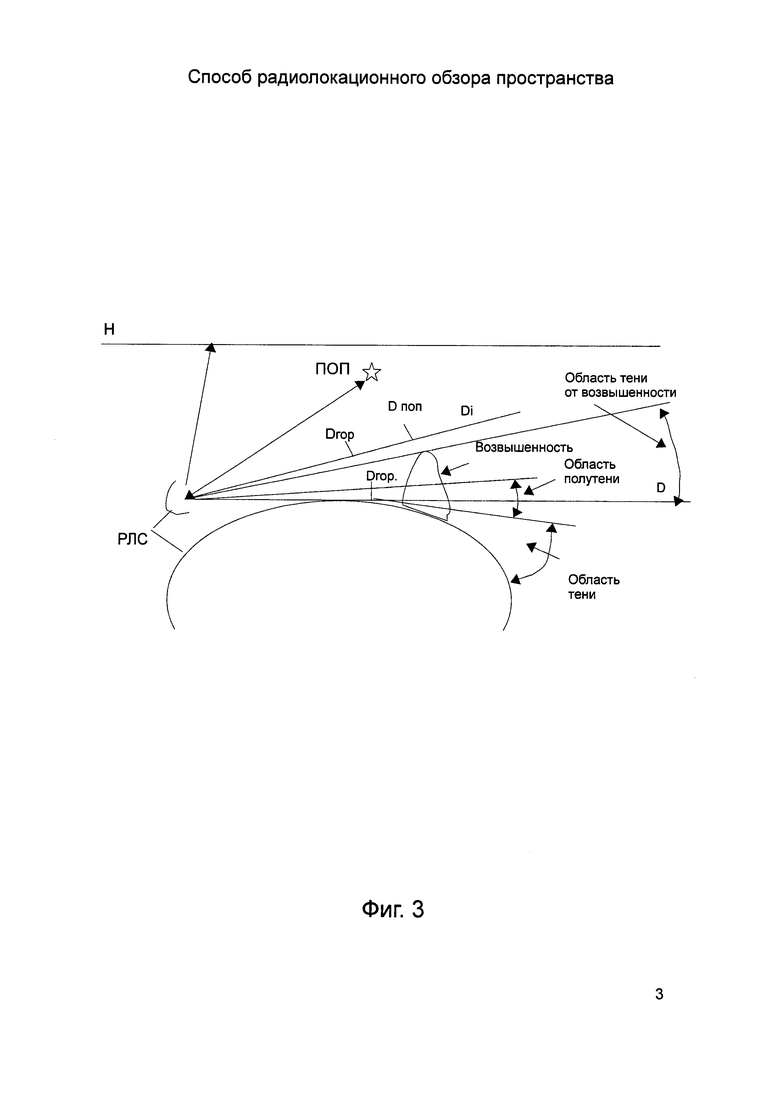
Если в осматриваемой РЛС зоне имеется постановщик ответной помехи, то он, после получения сигнала РЛС, начинает излучать помеху в виде его копий. При этом, принимая прямые сигналы РЛС, он может принимать их, находясь в области боковых лепестков ДНА (и даже фона) на больших расстояниях от РЛС. РЛС принимает эти сигналы ПОП, в том числе и боковыми лепестками ДНА (так как на нее воздействует прямой мощный сигнал, излученный ПОП), как отраженные сигналы от целей во всем угломестном столбце. Для распознавания ложных целей при осмотре очередного направления излучения в угломестном столбце или при следующем излучении зондирующего сигнала в том же направлении изменяют его параметры и считают ложными целями все принимаемые сигналы с предыдущими параметрами. Эти сигналы являются ложной целью, которую необходимо распознать. На фиг. 2 приведены диаграммы, поясняющие распределение во времени: зондирующих сигналов РЛС (фиг. 2а); сигналов, излучаемых ПОП после облучения зондирующими сигналами (фиг. 2б); сигналов, поступающих на вход РЛС (фиг. 2в), и нераспознанных сигналов (фиг. 2г). Из приведенных диаграмм видно, что на интервале дальности до ПОП, равном Dпоп=tпоп×C (где С - скорость света, a tпоп - время распространения сигнала от ПОП до РЛС), ложная цель распознается, а вот на дальностях за Dпоп (фиг. 3) и до конца инструментальной дальности РЛС, равной Dи=Т×С (где Т - период повторения зондирующего сигнала) ложная цель не распознается и ее сигналы будут восприниматься как отраженные от целей, поскольку ПОП после получения зондирующего сигнала с измененными параметрами начинает излучать его усиленные копии. Т.е. если ПОП находится дальше инструментальной дальности Dи РЛС, то все ложные цели будут распознаны во всем угломестном столбце, а в случае когда ПОП находится на расстоянии Dпоп, меньшем инструментальной дальности Dи, ложные цели на дальностях, больших расстояния Dпоп, не распознаются. В этом случае используют дополнительные меры, обеспечивающие распознавание ложных целей. А именно, считают ложными целями все сигналы, если они приняты в области тени (полутени) [Голев К.В. Расчет дальности действия радиолокационных станций, М.: «Сов. радио», 1962 г., с. 33], например на дальностях за пределами прямой видимости РЛС, равной Dгор=tгор×С (где tгор - время распространения сигнала в пределах прямой видимости в нижних углах угломестного столбца), либо за возвышенностью, либо на дальностях выше предельных высот Н, достигаемых целью обнаруженного класса (фиг. 3). Последний случай может быть реализован в РЛС, способных по параметрам сигналов распознавать класс цели. Также считают ложными целями сигналы с измененными параметрами, принятые и в пределах Dгор в направлении Di, если эти сигналы коррелированы с сигналами, обнаруженными за пределами прямой видимости Dгор в направлении D. Сигналы считают коррелированными, если у принятых с одного направления сигналов уровни одинаковы в режиме линейного приема сигналов или в режиме приема сигналов с ограничением или равны их автокорреляционные функции. Равенство амплитуд сигналов, принятых на разных дальностях в линейном режиме или в режиме с ограничением (это означает идентичность их фазовой структуры), а также равенство их автокорреляционных функций является признаком излучения сигналов одним источником из одной точки.
В случае использования зондирующего сигнала с частотной модуляцией для сохранения возможности селекции движущихся целей изменение его параметров выполняют путем изменения закона модуляции на зеркальный.
Изобретение иллюстрируется чертежами:
фиг. 1 - диаграмма, поясняющая образование угломестного столбца;
фиг. 2 - диаграмма, поясняющая способ обзора;
фиг. 3 - диаграмма, поясняющая ограничение видимости по высоте, горизонту и за возвышенностью.
На фиг. 1 проиллюстрирован процесс образования угломестного столбца в процессе электронного сканирования главного луча ДНА по углу места при вращении всей антенны в азимутальной плоскости.
На фиг. 2 проиллюстрирован временной процесс обзора пространства. Обзор состоит из активной работы РЛС, когда в заданном направлении излучается зондирующий сигнал с измененными параметрами через каждый период зондирования (фиг. 2а) и когда ПОП переизлучает сигналы зондирующего сигнала а с прежними параметрами и измененными (фиг. 2б). На фиг. 2в показаны сигналы, переизлученные ПОП и принятые РЛС с прежними и измененными параметрами. На фиг. 2г показаны остатки нераспознанных сигналов. Нераспознанными остаются сигналы помехи с измененными параметрами, попадающие в интервал приема сигналов с измененными параметрами (это сигналы помехи, принятые с дальности за ПОП). Если принимаются сигналы с измененными параметрами, но с высот, недостижимых для целей обнаруженного класса, или из области тени (полутени), то они также являются помехой.
На фиг. 3 проиллюстрирован процесс пространственного обзора различных зон и связанных с ними ограничений приема сигналов, в частности ограничение обнаружения по высоте Н, выше которой цели обнаруженного класса не могут появляться независимо от дальности, а также ограничения прямой видимостью в области тени, возникающей за возвышенностью или горизонтом или в полутени.
Таким образом, решается поставленная задача и достигается технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2582088C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2596851C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569490C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569496C1 |
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704015C1 |
| Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2638317C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) | 2015 |
|
RU2586077C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ СИГНАЛОВ | 2015 |
|
RU2596853C1 |
| СПОСОБ ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПОМЕХ (ВАРИАНТЫ) | 2014 |
|
RU2549373C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
Изобретение относится к области радиолокации и может быть использовано для распознавания синхронной ответной помехи (СОП). Достигаемый технический результат - распознавание сигналов синхронной ответной помехи, формирующих ложные цели. Указанный результат достигается тем, что осмотр направлений под различными углами места осуществляют зондирующими сигналами с измененными параметрами, принимают решение об обнаружении ложных целей под всеми углами места на дальностях, на которых обнаружены сигналы с прежними параметрами и с измененными, принятыми в зоне, где прием отражений от целей маловероятен или невозможен. Указанный технический результат решается также тем, что зоной, где прием сигналов, отраженных от цели, маловероятен или невозможен, считают зоны, расположенные за пределами прямой видимости и за максимальной дальностью действия РЛС, в области теней (полутеней) и на высотах, недостижимых для реальных целей обнаруженного класса. Указанный технический результат решается также тем, что закон линейной частотной модуляции зондирующего сигнала изменяют на зеркальный, а также тем, что считают ложной целью сигналы, принятые во всем угломестном столбце на дальностях, на которых обнаружены сигналы с измененными параметрами и в пределах прямой видимости, если они коррелированы с сигналами, принятыми в зоне, где прием сигналов, отраженных от целей, маловероятен или невозможен, кроме того, сигналы считают коррелированными, если принятые с одного направления сигналы на разных дальностях имеют одинаковые уровни в режиме линейного приема сигналов и в режиме приема сигналов с ограничением или равны их автокорреляционные функции. 4 з.п. ф-лы, 3 ил.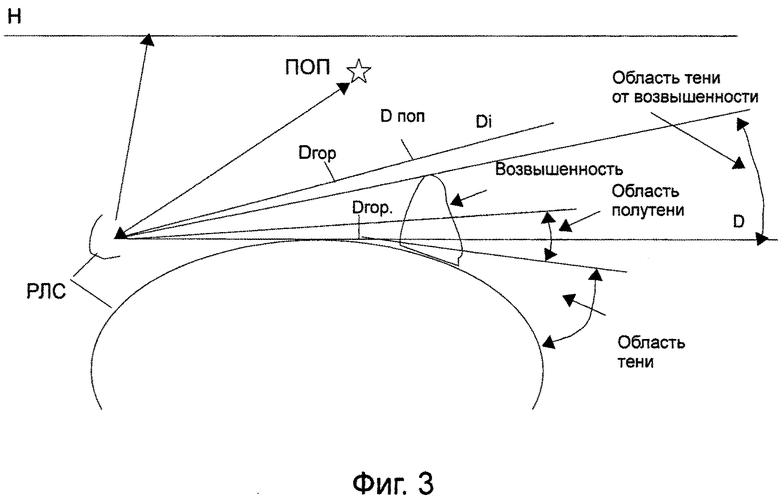
1. Способ радиолокационного обзора пространства, основанный на сканировании луча диаграммы направленности антенны в угломестной и азимутальной плоскостях и заключающийся в последовательном осмотре угловых направлений, отличающийся тем, что осмотр направлений под разными углами места осуществляют зондирующими сигналами с изменениями параметров, обеспечивающими разделение этих сигналов, принимают решение об обнаружении ложных целей под всеми углами места на дальностях, на которых обнаружены сигналы с прежними параметрами и с измененными в зоне, где прием отражений от целей маловероятен или невозможен.
2. Способ по п. 1, отличающийся тем, что зоной, где прием отражений от цели маловероятен или невозможен, считают зоны, расположенные за пределами прямой видимости и за максимальной дальностью действия радиолокационной станции, в области теней (полутеней) и на высотах, недостижимых для целей обнаруженного класса.
3. Способ по п. 1, отличающийся тем, что закон линейной частотной модуляции зондирующего сигнала изменяют на зеркальный.
4. Способ по п. 1, отличающийся тем, что считают ложной целью сигналы, принятые с одного направления на дальностях, на которых обнаружены сигналы с измененными параметрами и в пределах прямой видимости, если они коррелированы с сигналами, принятыми в зоне, где прием сигналов, отраженных от целей, маловероятен или невозможен.
5. Способ по п. 4, отличающийся тем, что сигналы считают коррелированными, если принятые с одного направления сигналы на разных дальностях имеют одинаковые уровни в режиме линейного приема сигналов и в режиме приема сигналов с ограничением или равны их автокорреляционные функции.
| Справочник по радиолокации | |||
| Под ред | |||
| М | |||
| СКОЛНИКА, Москва, 1978, "Советское Радио", т.4, с.72 | |||
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ СИНХРОННЫХ ОТВЕТНЫХ ПОМЕХ | 2013 |
|
RU2562449C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ СИНХРОННЫХ ОТВЕТНЫХ ПОМЕХ | 2014 |
|
RU2557253C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2014 |
|
RU2554092C1 |
| JP 2015178996 A, 08.10.2015 | |||
| US 6268821 B1, 31.07.2001 | |||
| EP 1960807 B1, 03.06.2003. | |||

