Изобретение относится к электромеханике, к устройствам автоматики, в частности к конструкции электромагнита следящего действия.
Известен электромагнит следящего действия, содержащий корпус, обмотку, якорь, возвратную пружину, центрирующую втулку (см. Поляк Д. Г., Есеновский-Лашков Ю.К. Электроника автомобильных систем управления. - М.: Машиностроение, 1987. - 200 с.).
Известен также «быстродействующий электромагнитный привод возвратно-поступательного движения» (см. Казаков Л.А. Электромагнитные устройства РЭА. - М.: Радио и связь, 1991, с.26, рис.2.6), имеющий две подвижные катушки, закрепленные на немагнитном штоке (якоре), передвигающиеся относительно индуктора с кольцевой обмоткой возбуждения.
Недостатками аналогов являются: малое тяговое усилие на якоре, особенно при начальных небольших перемещениях, обеспечиваемых малыми токами в обмотке возбуждения, малый ход якоря, наклонная тяговая характеристика электромагнита (привода) в целом.
Наиболее близким по техническому решению, принятому за прототип, является электромагнит следящего действия, содержащий корпус, относительно которого подвижно установлены жестко связанные друг с другом управляющая и форсажная обмотки, фиксатор положения управляющей обмотки относительно корпуса, якорь, имеющий конические концы с двух сторон, электронный блок выработки токов управляющей и форсажной обмоток (см. RU №2439729, H01F 7/16, 2012) - прототип.
Недостатками прототипа являются: небольшой ход якоря, определяемый величиной хода (перемещения) управляющей обмотки, а также отсутствие фиксации положения якоря при прекращении действия тока в форсажной обмотке.
Задачами изобретения являются: обеспечение большого хода якоря, значительно превышающего величину хода управляющей обмотки, а также обеспечение фиксации якоря при прекращении действия тока в форсажной обмотке, способной удерживать якорь при силовом воздействии на него.
Для решения данной задачи предложен электромагнит следящего действия, в котором управляющая и форсажная обмотки конструктивно связаны друг с другом посредством рычажного механизма, обеспечивающего при движении относительно корпуса управляющей обмотки увеличенный ход форсажной обмотки, при этом фиксаторы положения выполнены с управлением от электронного блока и установлены на форсажной обмотке и на якоре. Выполнение фиксаторов с управлением от электронного блока позволяет им по отдельности фиксировать обмотки и якорь относительно корпуса. Установка фиксатора на форсажной обмотке обеспечит ее фиксированное положение относительно корпуса при втягивании якоря, который может воспринимать большую нагрузку при работе электромагнита. Установка же фиксатора только на управляющей обмотке может привести к смещению форсажной обмотки при втягивании нагруженного внешним усилием якоря из-за люфта в рычажном механизме, связывающем эти обмотки. Установка фиксатора на якоре обеспечит его фиксированное положение относительно корпуса во время отсутствия тока в форсажной обмотке и при воздействии внешнего усилия на якорь.
Предлагаемое изобретение позволяет получить большой ход якоря электромагнита следящего действия, значительно превышающий величину хода управляющей обмотки, а также обеспечивать фиксированное положение якоря относительно корпуса при силовом воздействии на якорь извне во время отсутствия тока в форсажной обмотке, обеспечивать четкое слежение якоря управляющим командам блока управления.
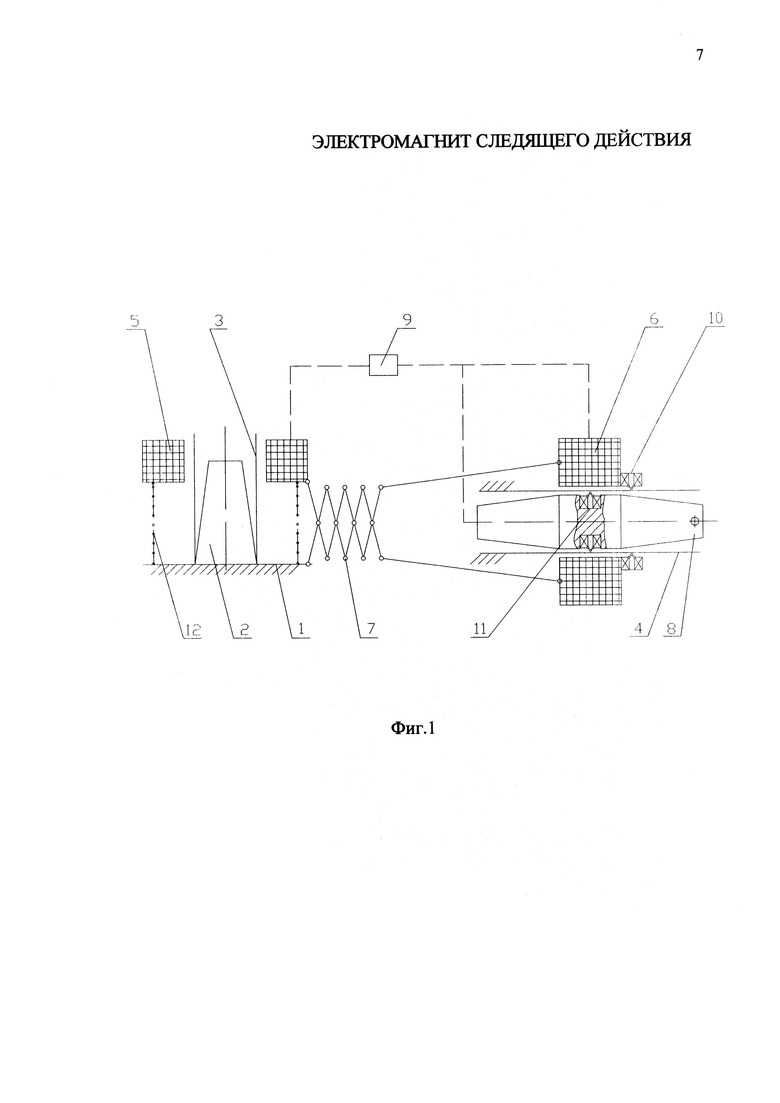
Для пояснения предлагаемого изобретения предложена фиг.1.
Электромагнит содержит корпус 1, скрепленные с ним сердечник 2 и направляющие втулки 3 и 4 из немагнитного материала, управляющую 5 и форсажную 6 обмотки, рычажный механизм ножничного типа 7, якорь 8, электронный блок выработки токов 9, фиксаторы положения форсажной обмотки и якоря, 10 и 11, с управлением от электронного блока, возвратную пружину управляющей обмотки 12.
Электромагнит работает следующим образом. Электронный блок управления 9 пошагово и поочередно подает токи на управляющую обмотку 5 и фиксатор положения якоря 11, затем на форсажную обмотку 6 и фиксатор ее положения 10. В первом положении блоком управления 9 устанавливается такая величина тока управляющей обмотки, чтобы ее шаговое перемещение, воздействуя на рычажный механизм ножничного типа 7, вызывало не чрезмерно увеличенное перемещение форсажной обмотки 6, а такое, при котором создается требуемое усилие втягивания якоря 8 при подаче на форсажную обмотку соответствующего тока. Во втором положении ток подается только на форсажную обмотку и фиксатор ее положения 10, от чего якорь перемещается на соответствующую величину ранее перемещенной форсажной обмотки. Затем цикл повторяется. Фиксаторы 10 и 11 представлены состоящими из двух катушек каждый, одна из катушек в фиксаторе подвижна относительно другой. Катушки шарнирно соединены с распорками, которые связаны противоположными (свободными) концами тоже шарнирно. При отсутствии тока в катушках фиксатора они отодвинуты друг от друга пружинкой. При подаче тока на катушки они притягиваются и распорки связывающим их шарнирным соединением прижимаются к неподвижной направляющей 4, фиксируя положение детали, на которой установлен фиксатор относительно корпуса.
Таким образом, предлагаемое изобретение позволяет обеспечить большой ход якоря электромагнита следящего действия, значительно превышающий величину хода управляющей обмотки, а также обеспечивать фиксированное положение якоря относительно корпуса при силовом воздействии на якорь извне во время отсутствия тока в форсажной обмотке, обеспечивать в целом четкое слежение якоря управляющим командам блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТ СЛЕДЯЩЕГО ДЕЙСТВИЯ | 2010 |
|
RU2439729C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2041083C1 |
| Механизм смены цвета утка на ткацком станке | 1987 |
|
SU1437433A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034719C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044663C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2019 |
|
RU2713305C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2321502C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ И ЗАЩИТЫ ПАРОВОЙ ТУРБИНЫ | 2010 |
|
RU2450128C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2090384C1 |
| КЛАПАН ВОЗДУХОЗАБОРНИКА | 2021 |
|
RU2775763C1 |
Изобретение относится к электротехнике, к устройствам автоматики, к электромагнитам следящего действия. Электромагнит включает корпус, относительно которого подвижно установлены управляющая и форсажная обмотки, фиксатор положения обмотки относительно корпуса, якорь, имеющий конические концы с двух сторон, электронный блок выработки токов управляющей и форсажной обмоток. Электронный блок обеспечивает пошаговую, попеременную выработку токов обмоток с одновременной подачей тока только на одну обмотку. В электромагните управляющая и форсажная обмотки конструктивно связаны друг с другом посредством рычажного механизма, обеспечивающего при движении относительно корпуса управляющей обмотки увеличенный ход форсажной обмотки. Фиксаторы положения выполнены с управлением от электронного блока и установлены на форсажной обмотке и на якоре. Технический результат состоит в обеспечении близкой к горизонтальной тяговой характеристики электромагнита и большего хода якоря, значительно превышающего величину хода управляющей обмотки. При этом обеспечивается фиксированное положение якоря относительно корпуса при силовом воздействии на якорь извне во время отсутствия тока в форсажной обмотке и в целом четкое слежение якоря управляющим командам блока управления. 1 ил.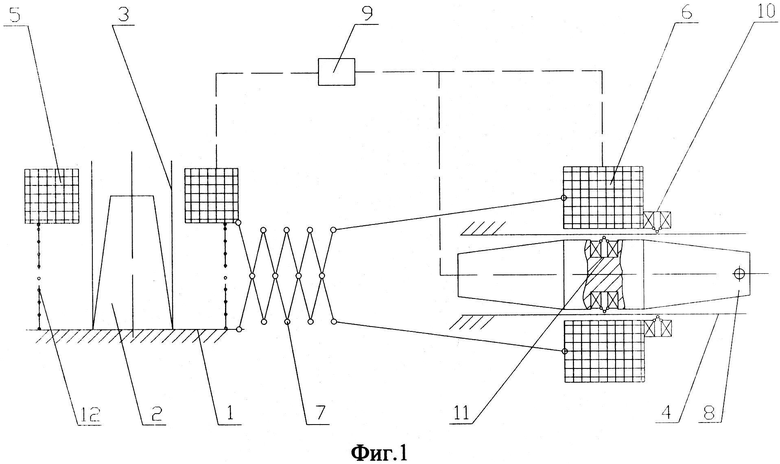
Электромагнит следящего действия, содержащий корпус, относительно которого подвижно установлены управляющая и форсажная обмотки, фиксатор положения относительно корпуса на одной из обмоток, якорь, имеющий конические концы с двух сторон, электронный блок выработки токов управляющей и форсажной обмоток, отличающийся тем, что управляющая и форсажная обмотки связаны друг с другом посредством рычажного механизма ножничного типа, при этом блок управления обеспечивает поочередную подачу управляющего тока на управляющую обмотку и фиксатор положения якоря относительно корпуса и форсажную обмотку и фиксатор ее положения так, что подача управляющего тока в управляющую обмотку обеспечивает ее пошаговое перемещение, воздействующее через указанный рычажный механизм на форсажную обмотку, подача управляющего тока на которую обеспечивает перемещение якоря на величину, значительно превышающую ход управляющей обмотки.
| ЭЛЕКТРОМАГНИТ СЛЕДЯЩЕГО ДЕЙСТВИЯ | 2010 |
|
RU2439729C2 |
| ЭЛЕКТРОМАГНИТНЫЙ СЛЕДЯЩИЙ ПРИВОД | 2003 |
|
RU2278465C2 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2041083C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ С ГОРИЗОНТАЛЬНОЙ ТЯГОВОЙ ХАРАКТЕРИСТИКОЙ (ВАРИАНТЫ) | 1995 |
|
RU2089995C1 |
| Пропорциональный электромагнит с настраиваемой тяговой характеристикой | 1990 |
|
SU1818637A1 |
| Способ очистки воздуха помещений от вредных газов, аэрозолей, продуктов горения при пожарах и техногенных авариях | 2017 |
|
RU2687502C2 |

