Изобретение относится к машиностроению и может быть преимущественно использовано в трансмиссиях транспортных средств для управления сцеплением.
Известно устройство автоматического управления сцеплением транспортного средства, содержащее датчик частоты вращения вала двигателя, подключенный к частотно-аналоговому преобразователю, соединенному с первым входом реле управления блокировкой сцепления и первым входом коммутирующего устройства, второй вход которого связан с выходом реле управления блокировкой сцепления, а выход через первый вход регулятора тока и усилитель тока с управляющей обмоткой электромагнита следящего действия и с блоком перенастройки реле управления блокировкой сцепления, имеющей обратную связь с вторым входом реле управления блокировкой сцепления, бинарный датчик исходного положения дроссельной заслонки карбюратора, инвертирующий выход которого подключен к второму входу элемента И, первый вход которого связан с выходом реле управления блокировкой сцепления, а выход с вторым входом устройства управления запуском генератора одиночных импульсов, первый вход которого также связан с выходом реле управления блокировкой сцепления, а выход с входом генератора одиночных импульсов, выход которого связан с ключевым усилителем тока в цепи форсажной обмотки электромагнита следящего действия и с вторым входом ключевого элемента, первый вход которого связан с неинвертирующим выходом бинарного датчика исходного положения дроссельной заслонки карбюратора, а выход с вторым входом регулятора тока, имеющего по третьему входу обратную связь с усилителем, и выключатель принудительного выключения сцепления, установленный на рычаге переключения передач, подключенный к третьему входу устройства управления запуском генератора одиночных импульсов.
Недостатком известного устройства является сложность его конструкции и наличие больших гистерезисных потерь на трение в тросовом приводе сцепления, что снижает быстродействие и надежность устройства в работе и тем самым ограничивает возможности ее применения на транспортных средствах.
Известно также устройство автоматического управления сцеплением транспортного средства, содержащее датчик частоты вращения вала двигателя, подключенный к частотно-аналоговому преобразователю, соединенному с первым входом реле управления блокировкой сцепления и первым входом коммутирующего устройства, второй вход которого связан с выходом реле управления блокировкой сцепления, а выход через первый вход регулятора тока и усилитель тока с управляющей обмоткой электромагнита следящего действия и с блоком перенастройки реле управления блокировкой сцепления, имеющей обратную связь с вторым входом реле управления блокировкой сцепления, бинарный датчик исходного положения педали управления дроссельной заслонкой карбюратора, инвертирующий выход которого подключен к второму входу элемента И, первый вход которого связан с выходом реле управления блокировкой сцепления, а выход с вторым входом устройства управления запуском генератора одиночных импульсов, первый вход которого также связан с выходом реле управления блокировкой сцепления, а выход с входом генератора одиночных импульсов, выход которого связан с ключевым усилителем тока в цепи форсажной обмотки электромагнита следящего действия и с вторым входом ключевого элемента, первый вход которого связан с неинвертирующим выходом бинарного датчика исходного положения педали управления дроссельной заслонкой карбюратора, а выход с вторым входом регулятора тока, имеющего по третьему входу обратную связь с усилителем, выключатель принудительного выключения сцепления, установленный на рычаге переключения передач, подключенный к третьему входу устройства управления запуском генератора одиночных импульсов, кронштейн крепления электромагнита следящего действия к кузову, механизм пространственной переориентации направ- ления троссового привода сцепления и тягу шарнирного соединения педали сцепления и якоря электромагнита следящего действия.
Основным недостатком известного устройства является чрезмерная его сложность, обусловленная наличием форсажной обмотки с цепью управления. Кроме того, определение фактического положения якоря электромагнита следящего действия (т.е. вилки выключения сцепления) по длительности импульса может привести к поломкам моторно-трансмиссионной установки.
Цель изобретения повышение надежности за счет упрощения устройства.
Для этого известное устройство автоматического управления сцеплением снабжено коммутатором, дополнительным элементом ИЛИ, первый вход которого подключен к выходу коммутатора, связанного по входу с выходом элемента ИЛИ, второй вход подключен через инвертирующий элемент к выключателю принудительного выключения сцепления, а выход связан с вторым входом ключевого элемента, датчиком положения якоря электромагнита следящего действия, вход которого связан с выходом реле управления блокировкой сцепления, а выход с вторым входом коммутатора, и пружиной выбора зазоров в приводе сцепления, устанавливаемой в корпусе электромагнита следящего действия, при этом торец цилиндрического якоря, обращенный в сторону магнитного зазора, имеет форму усеченного конуса, вершина которого направлена внутрь якоря, а диаметр основания у его торца равен диаметру якоря.
Сопоставительный анализ с прототипом показывает, что предлагаемое устройство отличается наличием коммутатора, дополнительного элемента ИЛИ, датчика положения якоря электромагнита следящего действия и пружины выбора зазоров в пpиводе сцепления. Таким образом, заявляемое устройство соответствует критерию изобретения "новизна".
Сравнение предлагаемого технического решения не только с прототипом, но и с другими техническими решениями показывает, что каждый из названных отличительных признаков является известным. Однако при введении в предлагаемое устройство датчика положения якоря электромагнита следящего действия в указанной связи с остальными элементами и узлами оно приобретает новые технические свойства, повышающие ее надежность за счет упрощения конструкции. Это позволяет сделать вывод о соответствии технического решения критерию изобретения "существенные отличия".
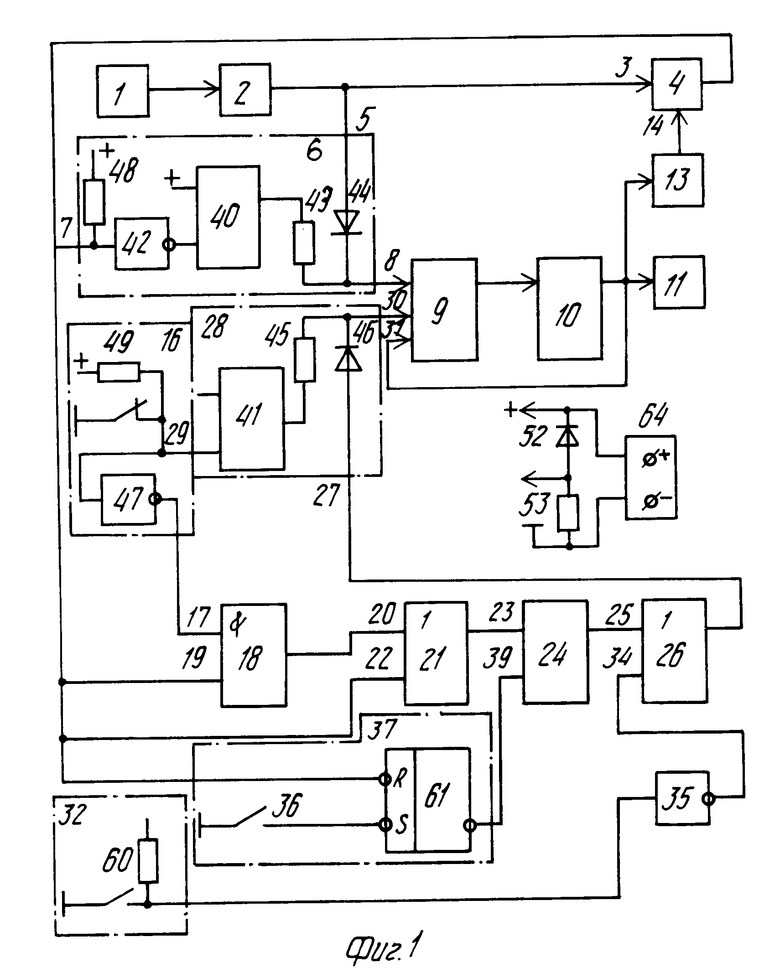
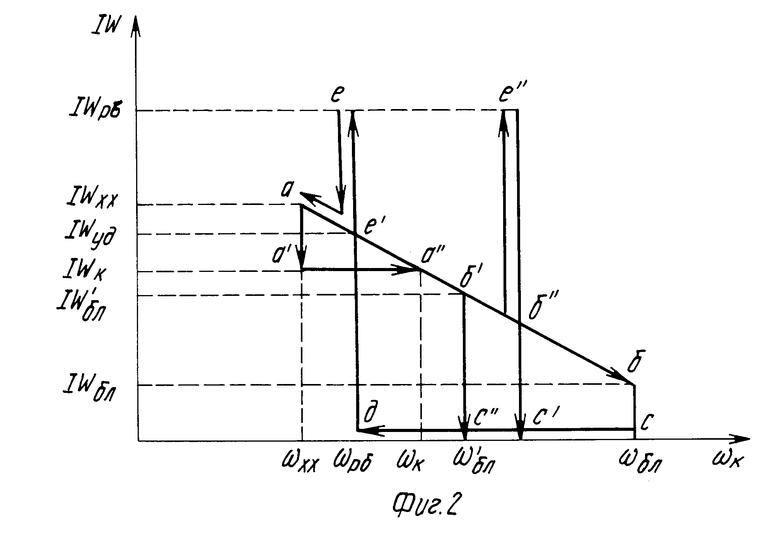
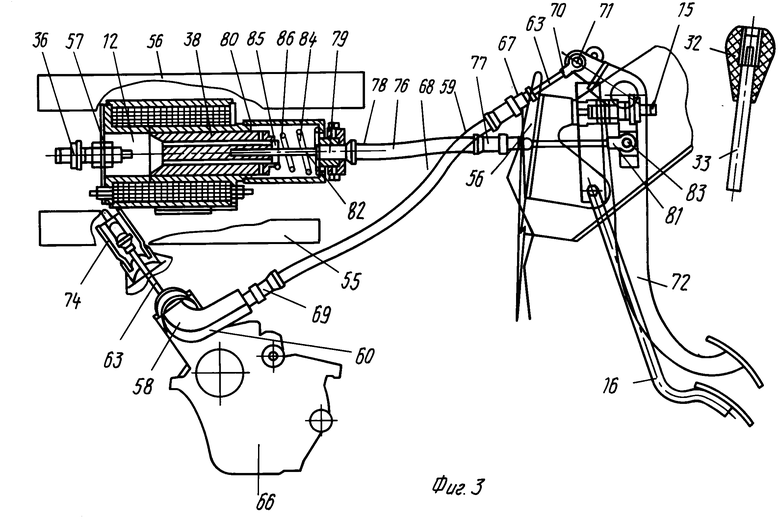
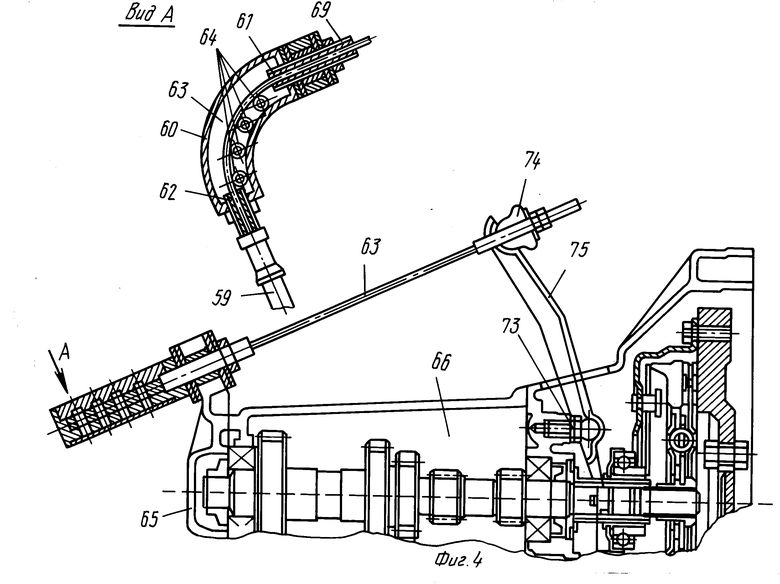
На фиг.1 представлена структурная схема устройства автоматического управления сцеплением транспортного средства; на фиг.2 график зависимости ампервитков электромагнита следящего действия от угловой скорости вала двигателя; на фиг.3 пример компоновки устройства автоматического управления сцеплением на автомобиле ВАЗ-1111; на фиг.4 то же, дополнительный вид и вид А.
Устройство автоматического управления сцеплением транспортного средства содержит датчик частоты вращения вала двигателя 1, подключенный к частотно-аналоговому преобразователю 2, соединенному с первым входом 3 реле управления блокировкой сцепления 4 и первым входом 5 коммутирующего устройства 6, второй вход 7 которого связан с выходом реле управления блокировкой сцепления, а выход через первый вход 8 регулятора тока 9 и усилитель тока 10 с обмоткой 11 электромагнита следящего действия 12 и с блоком перенастройки 11 электромагнита следящего действия 12 и с блоком перенастройки 13 реле управления блокировкой сцепления, имеющим обратную связь с вторым входом 14 реле управления блокировкой сцепления 4, бинарный датчик 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора, инвертирующий выход которого подключен к первому входу 17 элемента И 18, второй вход 19 которого связан с выходом реле управления блокировкой сцепления 4, а выход с первым входом 20 элемента ИЛИ 21, второй вход 22 которого также связан с выходом реле управления блокировкой сцепления 4, а выход с первым входом 23 коммутатора 24, выход которого связан с первым входом 25 элемента ИЛИ 26, выход которого связан с вторым входом 27 ключевого элемента 28, первый вход 29 которого связан с неинвертирующим выходом бинарного датчика 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора, а выход с вторым входом 30 регулятора тока 9, имеющего по третьему входу 31 обратную связь с усилителем тока 10, выключатель 32 принудительного выключения сцепления, установленный на рычаге 33 переключения передач, подключенный к второму входу 34 элемента ИЛИ 26 через инвертирующий элемент 35, и концевой выключатель 36 датчика 37 положения якоря 38 электромагнита следящего действия 12, вход которого связан с выходом реле управления блокировкой сцепления 4, а выход с вторым входом 39 коммутатора 24.
Коммутаторы аналоговых сигналов 40 и 41 переключают сигналы на входах регулятора тока 9. Коммутатор 40 управляется сигналом с выхода реле управления блокировкой сцепления 4 через инвертор 42. Замкнутое состояние коммутатора 40 соответствует режиму блокировки сцепления. При этом поступающий на первый вход 8 регулятора тока 9 потенциал от резистора 43 закрывает диод 44 и обеспечивает обесточивание обмотки 11 электромагнита следящего действия 12. Коммутатор 41 управляется от бинарного датчика 15 исходного положения педали управления дроссельной заслонкой карбюратора. Замкнутое состояние коммутатора 41 соответствует размыканию бинарного датчика 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора при нажатии на педаль управления 16 дроссельной заслонкой карбюратора. При этом потенциал на втором входе 30 регулятора тока 9 понижается за счет шунтирования входной цепи резистором 45 и в обмотке 11 электромагнита следящего действия 12 устанавливается ток, соответствующий начальной фазе сближения фрикционных элементов сцепления. Положительный потенциал с выхода элемента ИЛИ 26 через разделительный диод 46 подается на второй вход 30 регулятора тока 9 и обеспечивает в обмотке 11 электромагнита следящего действия 12 ток разблокировки в зависимости от состояния коммутаторов 40 и 41. Инвертор 47 обеспечивает необходимые уровень и форму сигнала бинарного датчика 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора для работы схемы И 18. Резистор 48 является нагрузкой реле управления блокировкой сцепления 4. Резисторы 49 и 50 обеспечивают выходной положительный потенциал при разомкнутом состоянии контактов бинарного датчика 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора и выключателя 32 принудительного выключения сцепления. Триггер 51 по сигналу с концевого выключателя 36 датчика 37 положения якоря 38 электромагнита следящего действия 12 обеспечивает понижение тока в обмотке 11 электромагнита следящего действия 12 от значения тока разблокировки до значения тока удержания, воздействуя на коммутатор 24, отключающий положительный потенциал от второго входа 30 регулятора тока 9. Стабилизированное напряжение питания для несиловой части электронной схемы снимается со стабилитрона 52, подключенного через резистор 53 к источнику бортового питания 54. Бинарный датчик 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора устанавливается на педали управления 16 дроссельной заслонкой карбюратора, электромагнит следящего действия 12 с помощью кронштейна 55 крепится к кузову 56 транспортного средства, концевой выключатель 36 датчика 37 положения якоря 38 электромагнита следящего действия 12 устанавливается на заглушке 57 электромагнита следящего действия 12. Механизм пространственной переориентации 58 направления троссового привода 59 сцепления, состоящий из корпуса 60 с каналами 61 и 62 для троса 63 и элементов качения 64 троса 63 на участке изменения направления его движения, прикрепляется к задней крышке 65 коробки передач 66. При этом один наконечник 67 оболочки 68 троса жестко прикреплен к кузову 56, второй наконечник 69 к корпусу 60 механизма пространственной переориентации 58 направления троссового привода 59 сцепления, один наконечник 70 троса 63 шарниром 71 соединен с педалью 72 сцепления, второй наконечник 73 шарниром 74 соединен с вилкой выключения 75 сцепления, трос 63 проходит от педали 72 сцепления к вилке выключения 75 сцепления внутри оболочки 68 троса и механизма пространственной переориентации 58 направления троссового привода 59 сцепления. Педаль 72 сцепления и якорь 38 электромагнита следящего действия 12 соединены между собой тросовым приводом 76, один наконечник 77 оболочки 78 которого жестко прикреплен к кузову 56, второй наконечник 79 к стакану 80 электромагнита следящего действия 12, один наконечник 81 троса 82 шарниром 83 соединен с педалью 72 сцепления, второй наконечник 84 через регулировочный узел 85 с якорем 38 электромагнита следящего действия 12. Пружина 86 выбора зазоров в приводе сцепления установлена в стакане 80 корпуса электромагнита следящего действия 12. Торец цилиндрического якоря 38, обращенный в сторону магнитного зазора, имеет форму усеченного конуса, вершина которого направлена внутрь якоря, а диаметр основания у его торца равен диаметру якоря.
Устройство работает следующим образом.
При вращении коленчатого вала двигателя на выходе датчика угловой скорости вала двигателя 1 формируется импульсная последовательность с частотой следования, пропорциональной угловой скорости вала двигателя ωк. Эти импульсы поступают на вход частотно-аналогового преобразователя 2, где они преобразуются в напряжение постоянного тока, которое управляет работой регулятора тока 9, в результате чего изменяется ток, протекающий в управляющей обмотке 22, а следовательно, и ампервитки (IW) электромагнита следящего действия 12 от значения IWxx, соответствующего угловой скорости холостого хода вала двигателя ωxx, до значения IWбл, соответствующего угловой скорости ωбл порога блокировки сцепления (участок аб на фиг.2). При этом происходит плавное сближение фрикционных элементов сцепления, обеспечивая трогание автомобиля с места. При достижении угловой скорости вала двигателя значения ωбл срабатывает реле управления блокировки сцепления 4, выход которого воздействует на вход 8 регулятора тока 9 через коммутирующее устройство 6 и вызывает уменьшение ампервитков электромагнита следящего действия 12 до нуля (участок бс), что обеспечивает полное сцепление фрикционных элементов муфты сцепления, т. е. его блокировку. При этом происходит перенастройка реле управления блокировкой сцепления 4 таким образом, что его возврат в исходное состояние может произойти только при уменьшении угловой скорости вала двигателя до ωрб (участок сд). Этому участку (сд) соответствует состояние блокировки сцепления, что уменьшает продолжительность работы сцепления с пробуксовкой и повышает ее долговечность. При уменьшении угловой скорости вала двигателя ωк до значения ωрб, соответствующего порогу разблокировки сцепления, по сигналу с выхода реле управления блокировкой сцепления 4 на второй вход 22 элемента ИЛИ 21 сигнал высокого уровня с выхода элемента ИЛИ 21 через коммутатор 24 поступает на первый вход 25 элемента ИЛИ 26. С выхода элемента ИЛИ 26 сигнал высокого уровня воздействует через ключевой элемент 28 на регулятор тока 9 таким образом, что в обмотке 11 электромагнита следящего действия 12 ампервитки увеличиваются до максимального значения IWрб (участок де), что обеспечивает быстрое выключение сцепления. При этом якорь 38 электромагнита следящего действия 12 перемещается из своего начального положения в конечное положение, замыкая контакты концевого выключателя 36 датчика 37 положения якоря 38 электромагнита следящего действия 12. Сигнал низкого уровня с концевого выключателя 36 переключает триггер 51 таким образом, что на его выходе и на выходе датчика 37 положения якоря 38 устанавливается низкий уровень напряжения. Этот сигнал воздействует на коммутатор 24, который прекращает подачу сигнала высокого уровня с выхода реле управления блокировкой сцепления 4 на регулятор тока 9. При этом значение ампервитков электромагнита следящего действия 12 снижается до величины IWуд (участок ее'), при которой обеспечивается надежное удержание сцепления в выключенном состоянии. Дальнейшее уменьшение угловой скорости вала двигателя до ωxx приводит к некоторому увеличению тока в обмотке 11 электромагнита следящего действия 12 до IWxx, благодаря чему выключенное состояние сцепления сохраняется (точка а на фиг. 2). Начальный ток плавного включения формируется с учетом состояния бинарного датчика 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора.
Данный процесс протекает следующим образом.
После нажатия на педаль управления 16 дроссельной заслонкой карбюратора ампервитки электромагнита следящего действия 12 снижаются до значения IWк начала плавного включения сцепления (участок а а'). Далее значение IWк сохраняется (участок а'a'') по мере увеличения текущего значения угловой скорости вала двигателя. При достижении угловой скорости вала двигателя значения ωк (точка а'') дальнейшее изменение ампервитков происходит в зависимости от угловой скорости вала двигателя и не отличается от описанного выше. Скачкообразное изменение ампервитков (участки а a', a'a'') при нажатии на педаль управления 16 дроссельной заслонкой карбюратора позволяет совместить противоречивые требования к ампервиткам разблокировки и ампервиткам плавной регулировки сцепления и получить раздельную оптимизацию этих режимов. Одновременно достигается дополнительное увеличение быстродействия управления сцеплением, повышается его долговечность. Если в процессе разгона вала двигателя будет осуществляться переключение передач, то сигнал принудительного выключения сцепления с выключателя 32 принудительного выключения сцепления, расположенного на рычаге 33 переключения передач, воздействует через инвертирующий элемент 35, второй вход 34 элемента ИЛИ 26 и через ключевой элемент 28 на регулятор тока 9. В результате происходит увеличение ампервитков электромагнита следящего действия 12 до IWрб (участок б''e''). При этом на входе блока перенастройки 13 реле управления блокиpовкой сцепления 4 формируется сигнал низкого уровня, которым реле управления блокировкой сцепления 4 перенастраивается на переход в режим блокировки при более низкой угловой скорости вала двигателя ωбл в диапазоне ωрб<ωбл'<ωбл. В том случае, если угловая скорость вала двигателя больше значения ωбл' (участок б'б), происходит срабатывание реле управления блокировкой сцепления 4 и ампервитки электромагнита следящего действия 12 уменьшаются до нуля (участок е''c'). Если угловая скорость вала двигателя меньше значения ωбл' (участок а б'), то ампервитки (IW) электромагнита следящего действия 12 изменяются в зависимости от угловой скорости вала двигателя от значения IWxx, соответствующего угловой скорости холостого хода вала двигателя ωxx до значения IWбл', соответствующего угловой скорости вала двигателя ωбл' (участок а б'). При достижении угловой скорости вала двигателя ωбл' происходит срабатывание реле управления блокировкой сцепления 4 и ампервитки электромагнита следящего действия 12 уменьшаются до нуля (участок б'c''), т.е. сцепление блокируется. Работа устройства в случае переключения передач в режиме установившегося движения транспортного средства аналогична рассмотренному. Все это позволяет уменьшить продолжительность работы сцепления с пробуксовкой без снижения динамических показателей транспортного средства.
Управление сцеплением в ситуациях, связанных со сбросом педали управления 16 дроссельной заслонкой карбюратора при угловой скорости вала двигателя ωрб<ωк<ωбл (например, с целью торможения или временного ограничения темпа разгона на низших передачах) протекает следующим образом.
Потенциал низкого уровня от бинарного датчика 15 исходного положения педали управления 16 дроссельной заслонкой карбюратора через инвертор и элемент И 18 (при наличии потенциала высокого уровня с выхода реле управления блокировкой сцепления 4) поступает на первый вход 20 элемента ИЛИ 21 и с его выхода через коммутатор 24, элемент ИЛИ 26 и коммутирующее устройство на вход регулятора тока 9, вызывая, как было описано ранее, увеличение ампервитков электромагнита следящего действия 12 до максимального значения IWрб, обеспечивая цикл доразблокировки не заблокированного полностью сцепления в диапазоне ωрб<ωк<ωбл. Тем самым исключается возможный останов двигателя и, при необходимости, сохраняется запас инерции транспортного средства в фазе разгона.
Управление сцепления при неисправностях электронной и электрической частей устройства осуществляется в классическом режиме с помощью педали сцепления, связанной через троссовый привод с вилкой выключения сцепления.
Таким образом, благодаря снабжению устройства педалью управления дроссельной заслонкой, кронштейном крепления электромагнита следящего действия к кузову, механизмом пространственной переориентации направления тросового привода сцепления, троссовым приводом между педалью сцепления и якорем электромагнита следящего действия и соответствующими связями между ними и остальными узлами и элементами устройства достигается повышение его быстродействия и надежности за счет снижения потерь на трение в приводе сцепления транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2090384C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034719C1 |
| СИСТЕМА УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2017631C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2321502C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2041083C1 |
| Устройство автоматического управления сцеплением транспортного средства | 1988 |
|
SU1659251A1 |
| Система переключения передач ступенчатой коробки передач транспортного средства | 1984 |
|
SU1276534A1 |
| Система питания для двигателя внутреннего сгорания | 1979 |
|
SU857527A1 |
| Устройство для управления электромагнитомСцЕплЕНия ТРАНСпОРТНОй МАшиНы | 1979 |
|
SU846865A2 |
| Устройство для управления коробкой передач с плавным регулированием скорости вращения и механизмом подачи топлива транспортного средства | 1984 |
|
SU1286446A1 |
Использование: изобретение относится к машиностроению и может быть преимущественно использовано в трансмиссиях транспортных средств для управления сцеплением. Сущность: устройство снабжено коммутатором, дополнительным элементом ИЛИ, датчиком положения якоря электромагнита следящего действия, пружиной выбора зазоров в приводе сцепления, устанавливаемой в корпусе электромагнита следящего действия, и соответствующими связями между ними и остальными узлами и элементами устройства. При этом положение вилки выключения сцепления определяется электронным блоком на основе обработки и анализа сигналов от датчика частоты вращения вала двигателя, бинарного датчика исходного положения дроссельной заслонки карбюратора, датчика положения якоря электромагнита следящего действия и выключателя принудительного выключения сцепления. 4 ил.
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчик частоты вращения вала двигателя, подключенный к частотно-аналоговому преобразователю, соединенному с реле управления блокировкой сцепления и с регулятором тока, который связан с выходом реле управления блокировкой сцепления и входом усилителя, в выходную цепь которого включена управляющая обмотка электромагнита, и выключатель, связанный с рычагом переключения передач с возможностью управления блоком перенастройки реле блокировки сцепления и электромагнитом, отличающееся тем, что частотно-аналоговый преобразователь соединен с первым входом реле управления блокировкой сцепления и первым входом коммутирующего устройства, второй вход которого связан с выходом реле управления блокировкой сцепления, а выход через первый вход регулятора тока и усилитель тока с обмоткой электромагнита следящего действия и с блоком перенастройки реле управления блокировкой сцепления, имеющим обратную связь с вторым входом реле управления блокировкой сцепления, при этом устройство снабжено бинарным датчиком исходного положения педали управления дроссельной заслонкой карбюратора, инвертирующий выход которого подключен к первому входу элемента И, второй вход которого связан с выходом реле управления блокировкой сцепления, а выход с первым входом элемента ИЛИ, второй вход которого также связан с выходом реле управления блокировкой сцепления, ключевым элементом, первый вход которого связан с неинвертирующим выходом бинарного датчика исходного положения педали управления дроссельной заслонкой карбюратора, а выход с вторым входом регулятора тока, имеющего по третьему входу обратную связь с усилителем тока, выключателем принудительного выключения сцепления, установленным на рычаге переключения передач, коммутатором, дополнительным элементом ИЛИ, первый вход которого подключен к выходу коммутатора, связанного по входу с выходом элемента ИЛИ, второй вход подключен через инвертирующий элемент к выключателю принудительного выключения сцепления, а выход связан с вторым входом ключевого элемента, датчиком положения якоря электромагнита следящего действия, вход которого связан с выходом реле управления блокировкой сцепления, а выход с вторым входом коммутатора, и пружиной выбора зазоров в приводе сцепления, устанавливаемой в корпусе электромагнита следящего действия, при этом торец цилиндрического якоря, обращенный в сторону магнитного зазора, имеет форму усеченного конуса, вершина которого направлена внутрь якоря, а диаметр основания у его торца равен диаметру якоря.
| Устройство для автоматического управления сцеплением транспортного средства | 1980 |
|
SU929471A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
