Изобретение относится к системам автоматического управления агрегатами транспортных средств и, в частности, сцеплением.
Известно устройство автоматического управления сцеплением транспортного средства, содержащее датчик угловой скорости вала двигателя, подключенный к частотно-аналоговому преобразователю, связанному через регулятор тока и усилитель тока с катушкой электромагнита следящего действия, якорь которого кинематически связан с приводом сцепления, а также выключатель принудительного выключения сцепления, расположенный на рычаге переключения передач и связанный с катушкой электромагнита следящего действия [1]
Недостатком известного устройства является низкая стабильность работы, недостаточное быстродействие и долговечность.
Целью изобретения является повышение долговечности сцепления за счет уменьшения продолжительности его буксования путем автоматической перенастройки во время переключения передач.
Эта цель достигается тем, что устройство автоматического управления сцеплением транспортного средства, содержащее датчик угловой скорости вала двигателя, подключенный к частотно-аналоговому преобразователю, связанному через регулятор тока и усилитель тока с катушкой электромагнита следящего действия, якорь которого кинематически связан с приводом сцепления, а также выключатель принудительного выключения сцепления, расположенный на рычаге переключения передач и связанный с катушкой электромагнита следящего действия, снабжено бинарным датчиком исходного положения педали управления дроссельной заслонкой карбюратора, ключевым элементом, генератором одиночных импульсов, ключевым усилителем тока, устройством управления запуском генератора одиночных импульсов, датчиком скорости транспортного средства, причем частотно-аналоговый преобразователь выполнен двухвходовым, катушка электромагнита следящего действия выполнена с управляющей и форсажной обмотками, последняя из которых включена в выходную цепь ключевого усилителя тока, вход которого подключен к выходу генератора одиночных импульсов, вход которого присоединен к выходу устройства управления запуском генератора одиночных импульсов, выход генератора одиночных импульсов соединен через первый диод с первым входом регулятора тока, второй вход которого связан через второй диод с выходом частотно-аналогового преобразователя, выход усилителя тока подключен к управляющей обмотке катушки электромагнита следящего действия, неинвертирующий выход бинарного датчика через ключевой элемент подключен к первому входу регулятора тока, инвентирующий выход бинарного датчика связан с первым входом устройства управления запуском генератора одиночных импульсов, ко второму входу которого подключен выключатель принудительного выключения сцепления.
Дополнительно устройство может быть снабжено устройством сравнения, причем датчики угловой скорости вала двигателя и скорости транспортного средства подключены ко входам устройства сравнения, а его выход подключен к первому входу частотно-аналогового преобразователя, ко второму входу которого подключен неинвертирующий выход бинарного датчика исходного положения педали управления дроссельной заслонкой карбюратора, при этом выход регулятора тока соединен с третьим входом устройства управления запуском генератора одиночных импульсов.
Кроме того, устройство может быть снабжено реле управления блокировкой сцепления, блоком перенастройки реле управления блокировкой сцепления, элементом "И" и коммутирующим устройством, причем первый вход реле управления блокировкой сцепления подключен через блок перенастройки реле управления блокировки сцепления к выходу усилителя тока, а выход реле управления блокировкой сцепления подключен ко входу коммутирующего устройства, к третьему входу устройства управления запуском генератора одиночных импульсов и к первому входу элемента "И", ко второму входу которого подключен инвертирующий выход бинарного датчика, а к выходу первый вход устройства управления запуском генератора одиночных импульсов, при этом выход коммутирующего устройства подключен ко второму входу регулятора тока.
Устройство может быть снабжено дополнительным частотно-аналоговым преобразователем и устройством суммирования, причем датчик скорости транспортного средства подключен ко входу дополнительного частотно - аналогового преобразователя, выход которого связан со вторым входом реле управления блокировкой сцепления и с первым входом устройства суммирования, ко второму входу устройства суммирования подключен выход частотно-аналогового преобразователя, а выход устройства суммирования подключен ко входу второго диода, при этом неинвертирующий выход бинарного датчика подключен ко второму входу частотно-аналогового преобразователя.
Устройство может быть снабжено также схемой сравнения, причем датчики угловой скорости вала двигателя и скорости транспортного средства подключены ко входам схемы сравнения, выход которой подключен к первому входу частотно-аналогового преобразователя, второй вход которого связан с неинвертирующим выходом бинарного датчика, а выход со вторым входом реле управления блокировкой сцепления и со входом второго диода.
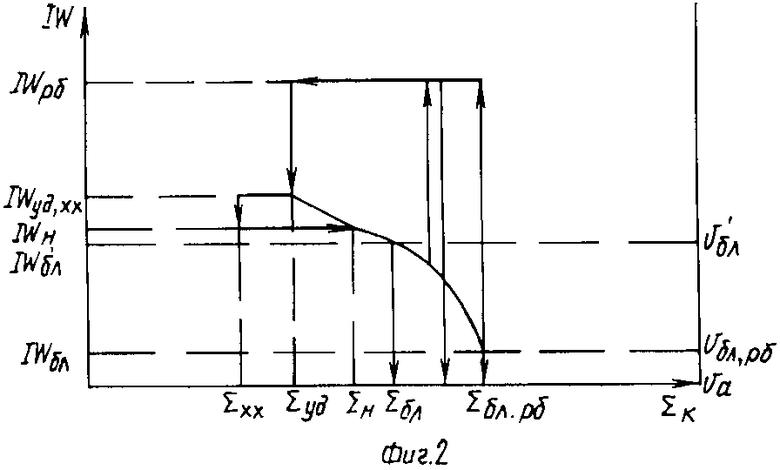
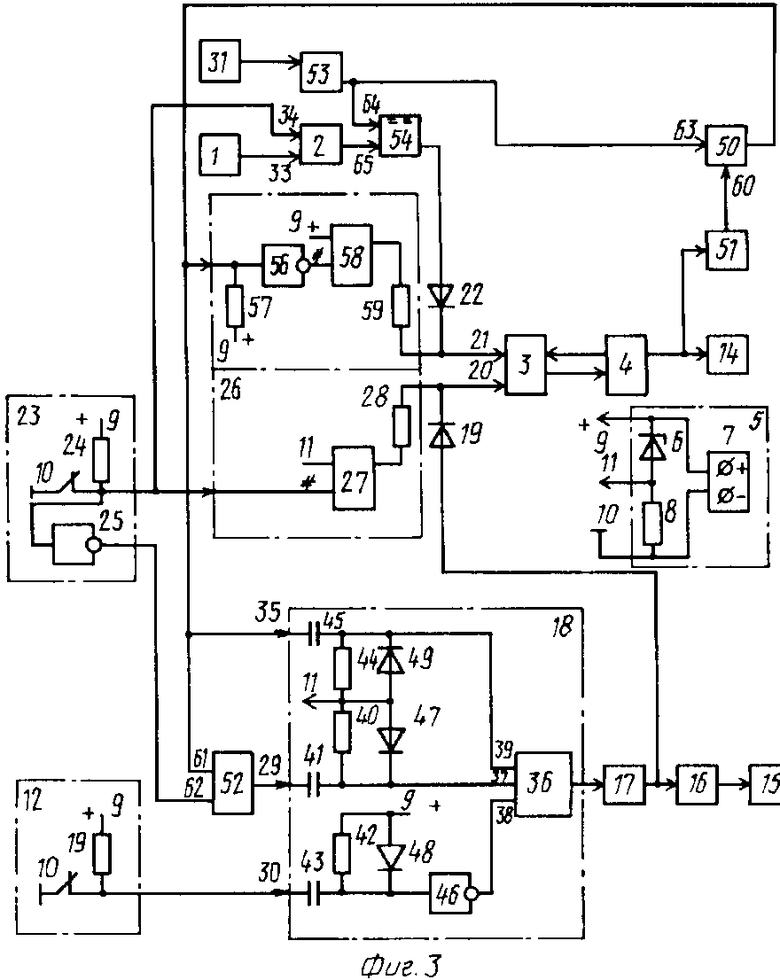
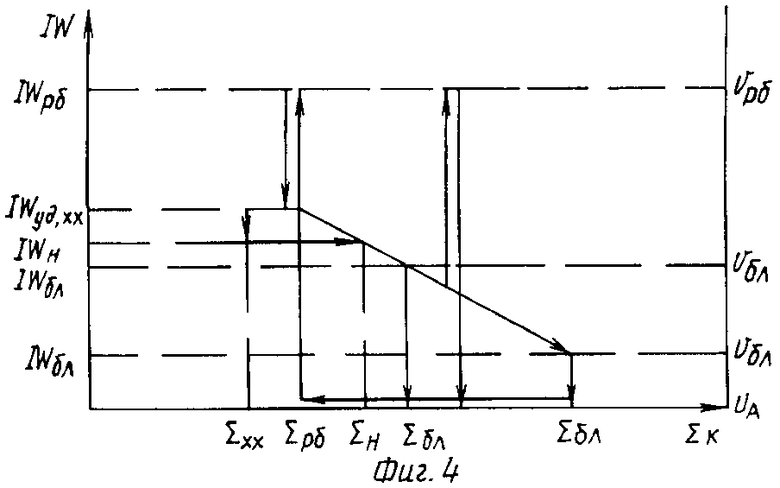
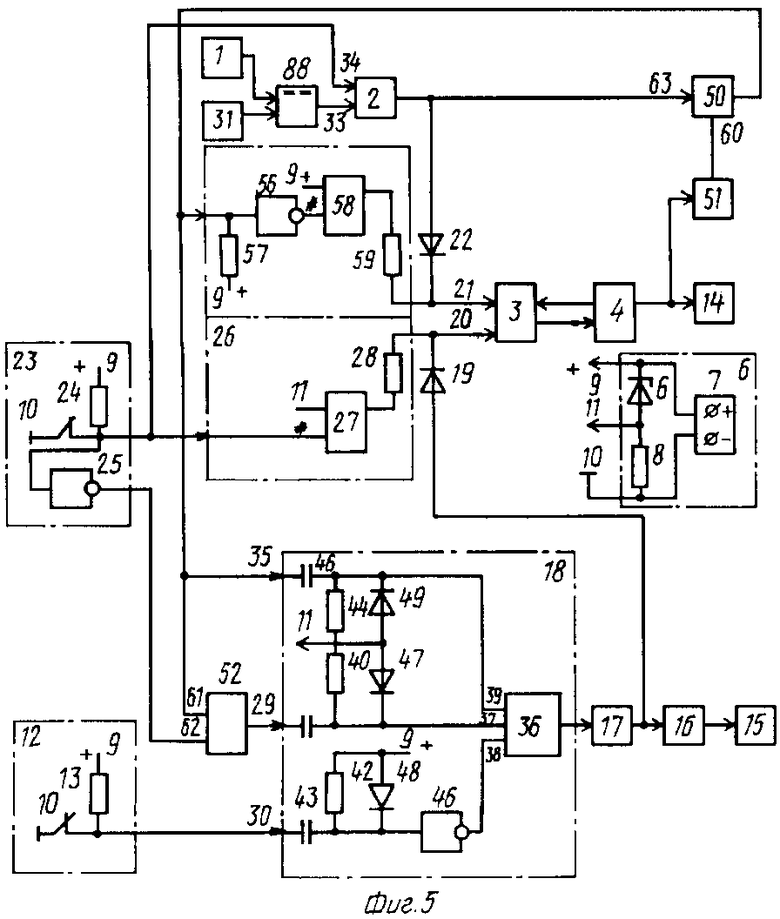
На фиг. 1 представлена структурная схема первого варианта выполнения устройства автоматического управления сцеплением; на фиг.2 характеристика изменения ампервитков катушки электромагнита следящего действия в зависимости от суммы угловой скорости вала двигателя и скорости движения транспортного средства, соответствующая первому варианту выполнения устройства; на фиг. 3 структурная схема второго варианта выполнения устройства автоматического управления сцеплением; на фиг. 4 характеристика изменения ампервитков катушки электромагнита следящего действия в зависимости от суммы угловой скорости вала двигателя и скорости движения транспортного средства, соответствующая второму варианту выполнения устройства; на фиг.5 структурная схема третьего варианта выполнения устройства автоматического управления сцеплением;
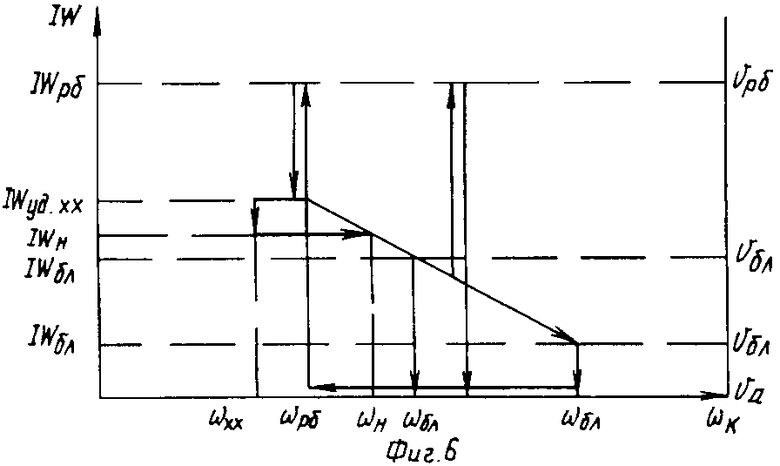
на фиг. 6 характеристика изменения ампервитков катушки электромагнита следящего действия в зависимости от угловой скорости двигателя транспортного средства, соответствующая третьему варианту выполнения устройства.
В устройстве по фиг.1 датчик 1 угловой скорости вала двигателя, через аналогово-цифровой преобразователь 2, регулятор 3 тока и усилитель 4 тока связан с катушкой электромагнита следящего действия, якорь которого кинематически связан с приводом сцепления (не показан). Блок 5 стабилизированного питания для несиловой части электронной схемы содержит стабилитрон 6, подключенный к источнику 7 бортового питания через резистор 8, а также плюсовой, массовый и промежуточный выводы 9, 10, 11, последний из которых присоединен к линии, соединяющей резистор 8 и стабилитрон 6. Выключатель 12 принудительного выключения сцепления расположен на рычаге переключения передач (не показан) и связан одним своим контактом с массовым выводом 10, а другим через резистор 13 с плюсовым выводом 9 блока 5 стабилизированного питания и с катушкой электромагнита следящего действия. Частотно-аналоговый преобразователь 2 выполнен двухвходовым. Катушка электромагнита следящего действия выполнена с управляющей и форсажной обмотками 14 и 15, последняя из которых включена в выходную цепь ключевого усилителя 16 тока, вход которого подключен к выходу генератора 17 одиночных импульсов, вход которого присоединен к выходу устройства 18 управления запуском генератора одиночных импульсов. Выход генератора 17 одиночных импульсов соединен через первый диод 19 с первым входом 20 регулятора 3 тока, второй вход 21 которого связан через второй диод 22 с выходом частотно-аналогового преобразователя 2. Выход усилителя 4 тока подключен к управляющей обмотке 14 катушки электромагнита следящего действия. Бинарный датчик 23 исходного положения педали управления дроссельной заслонкой карбюратора содержит контакты, один из которых связан с массовым выводом 10 блока 5 стабилизированного питания, а другой через резистор 24 с плюсовым выводом 9 блока 5 стабилизированного питания и через первый инвертор 25 с инвертирующим выходом бинарного датчика 23. Неинвертирующий выход бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора через ключевой элемент 26, содержащий последовательно установленные первый коммутатор 27 аналоговых сигналов и резистор 28, подключен к первому входу 20 регулятора 3 тока, инвертирующий выход бинарного датчика 23 связан с первым входом 29 устройства 18 управления запуском генератора 17 одиночных импульсов подключен выключатель 12 принудительного выключения сцепления. Датчик 1 угловой скорости вала двигателя и датчик 31 скорости транспортного средства подключены ко входам устройства 32 сравнения. Выход устройства сравнения 32 подключен к первому входу 33 частотно-аналогового преобразователя 2, ко второму входу 34 которого подключен не инвертирующий выход бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора. Выход регулятора 3 тока соединен с третьим входом 35 устройства 18 управления запуском генератора 17 одиночных импульсов. Устройство 18 управления запуском генератора одиночных импульсов содержит схему 36 "ИЛИ", первый, второй, и третий входы 37,38,39 которой подключены к одноименным входам 29,30,35 устройства 18 управления запуском генератора 17 одиночных импульсов через дифференцирующие РС-цепи 40 и 41, 42 и 43, 44 и 45. Дифференцирующая РС-цепь третьего входа 21 элемента 18 "ИЛИ" связана с ним через второй инвертор 46, а резистор 44 этой дифференцирующей РС-цепи подключен к плюсовому выводу блока 5 стабилизированного питания. Резисторы 40 и 44 дифференцирующих РС-цепей первого и третьего входов 37, 39 схемы 36 "ИЛИ" связаны между собой и промежуточным выводом 11 блока 5 стабилизированного питания. Параллельно резисторам 40, 42, 30 установлены диоды 47, 48, 49.
Устройство по фиг. 3 дополнительно снабжено реле 50 управления блокировкой сцепления, блоком 51 перенастройки реле 50 управления блокировкой сцепления, элементом 52 "И", дополнительным частотно-аналоговым преобразователем 53, устройством 54 суммирования и коммутирующим устройством 55, содержащим последовательно соединенные третий инвертор 56, вход которого связан через резистор 57 с плюсовым входом 9 блока стабилизированного питания, второй коммутатор 58 аналоговых сигналов, и резистор 59. Первый вход 60 реле 50 управления блокировкой сцепления подключен через блок 51 перенастройки реле 50 управления блокировкой сцепления к выходу усилителя 4 тока, а выход реле 50 управления блокировкой сцепления подключен ко входу коммутирующего устройства 55, к третьему входу 35 устройства 18 управления запуском генератора 17 одиночных импульсов и к первому входу 61 элемента 52 "И", ко второму входу 62 которого подключен инвентирующий выход бинарного датчика 23, а к выходу - первый вход 29 устройства 18 управления запуском генератора 17 одиночных импульсов, при этом выход коммутирующего устройства 55 подключен ко второму входу 21 регулятора 3 тока. Датчик 31 скорости транспортного средства в этом случае подключен ко входу дополнительного частотно-аналогового преобразователя 53, выход которого связан со вторым входом 63 реле 50 управления блокировкой сцепления и с первым входом 64 устройства 54 суммирования. Ко второму входу 65 устройства 54 суммирования подключен выход частотно-аналогового преобразователя 2, а выход устройства 54 суммирования подключен ко входу второго диода 22. Неинвертирующий выход бинарного датчика 23 подключен ко второму входу 34 частотно-аналогового преобразователя 2.
Устройство по фиг.5, дополнительно снабжено схемой 66 сравнения. Датчик 1 угловой скорости вала двигателя и датчик 31 скорости транспортного средства в этом случае подключены ко входам схемы 66 сравнения. Датчик 1 угловой скорости вала двигателя и датчик 31 скорости транспортного средства в этом случае подключены ко входам схемы 66 сравнения, выход которой подключен к первому входу 33 частотно-аналогового преобразователя 2, второй вход 34 которого связан с неинвертирующим выходом бинарного датчика 23, а выход со вторым входом 63 реле 50 управления блокировкой сцепления и со входом второго диода 22.
Устройство, представленное на фиг. 1, работает следующим образом. При вращении коленчатого вала двигателя на выходе датчика 1 угловой скорости вала двигателя формируется импульсная последовательность с частотой следования, пропорциональной угловой скорости ωк вала двигателя. Эти импульсы поступают на вход устройства 32 сравнения, где они сравниваются с импульсами, сформированными датчиком 31 скорости, частота которых пропорциональна скорости транспортного средства. Импульсная последовательность с выхода устройства 32 сравнения поступает на первый вход 33 частотно- аналогового преобразователя 2, где они преобразуются в напряжение постоянного тока, которое управляет работой регулятора 3 тока, в результате чего изменяется ток, протекающий в управляющей обмотке 14, а следовательно, и ампервитки (IW) электромагнита следящего действия от значения IWxx, соответствующего суммарному значению угловой скорости холостого хода вала двигателя и скорости транспортного средства Σхх до значения IWбл, соответствующего значению Σбл порога блокировки сцепления. При этом происходит плавное сближение фрикционных элементов сцепления, обеспечивая трогание транспортного средства с места. С момента трогания транспортного средства с места датчик 31 скорости начинает выдавать импульсы с частотой следования, возрастающей с возрастанием скорости. Суммирование импульсов с датчика 1 угловой скорости вала двигателя и датчика 31 скорости транспортного средства, охваченное положительной обратной связью, дает в начале плавное а затем все более резкое увеличение крутизны характеристики сближения фрикционных элементов сцепления. Процесс приобретает лавинообразный характер. При достижении скорости транспортного средства Va значение Vбл уровень напряжения на выходе частотно-аналогового преобразователя 2 становится достаточным чтобы вызвать уменьшение амервитков электромагнита следящего действия до нуля, что обеспечивает полное сцепление фрикционных элементов сцепления, т.е. его блокировку. Разблокировка сцепления происходит при уменьшении уровня напряжения на выходе частотно-аналогового преобразователя 2 до значения, соответствующего Vрб, равного значению Vбл, что становится возможным из-за того, что этот уровень напряжению соответствует нижней границе устойчивой работы двигателя при движении. Что невозможно при блокировке сцепления по оборотам двигателя. Этот процесс протекает следующим образом. Сигнал с выхода регулятора 3 тока поступает на третий вход 35 устройства 18 управления запуском генератора 17 одиночных импульсов, на выходе генератора 17 одиночных импульсов формируется одиночный импульс, который воздействует на ключевой усилитель 16 тока и через первый диод 19 на регулятор 3 тока таким образом, что в управляющей обмотке 14 и форсажной обмотке 15 электромагнита следящего действия ампервитки увеличиваются до максимального значения IWрб, что обеспечивает быстрое выключение сцепления. По окончании одиночного импульса значение ампервитков электромагнита следящего действия снижается до величины IWуд, при которой обеспечивается надежное удержание сцепления в выключенном состоянии.
Начальный ток плавного включения формируется с учетом состояния бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора. Данный процесс протекает следующим образом.
При отпущенной педали управления дроссельной заслонкой карбюратора напряжение низкого уровня поступает с неинвертирующего выхода бинарного датчика 23 исходного положения педали управления дроссельной заслонкой на второй вход 34 двухвходового частотно-аналогового преобразователя 2, что приводит к понижению величины его выходного напряжения, компенсируя возможное увеличение напряжения при повышении угловой скорости вала двигателя из-за неправильной регулировки карбюратора. После нажатия на педаль управления дроссельной заслонкой карбюратора на второй вход 34 частотно-аналогового преобразователя 2 подается напряжение, разрешающее его работу в определенном режиме. В режиме нормального трогания ампервитки электромагнита следящего действия снижаются до значения IWн начала плавного включения сцепления. Далее значение IWн сохраняется по мере увеличения текущего суммарного значения угловой скорости вала двигателя и скорости транспортного средства. При достижении Σωк Va значения Σн дальнейшее изменение ампервитков происходит в зависимости от угловой скорости вала двигателя, скорости транспортного средства и не отличается от описанного выше.
Если в процессе разгона вала двигателя будет осуществляться переключение передач, то сигнал принудительного выключения сцепления с выключателя 12 принудительного выключения сцепления, расположенного на рычаге переключения передач, воздействуя на второй вход 30 устройства 18 управления запуском генератора 17 одиночных импульсов, вызывает срабатывание генератора 17 одиночных импульсов, на выходе которого формируется одиночный импульс, описание воздействия которого на узлы устройства приведено выше. В результате происходит увеличение ампервитков электромагнита следящего действия по IWрб. При этом система перенастраивается на режим блокировки сцепления по сигналу V'бл с датчика скорости. В том случае, если после переключения передач скорость транспортного средства Va будет больше значения V'бл, ампервитки электромагнита следящего действия уменьшаются до нуля. Если скорость транспортного средства будет меньше значения V'бл, то ампервитки электромагнита следящего действия будут изменяться в зависимости от изменения Σωк Va по закону, описанному выше.
Работа устройства в случае переключения передач в режиме установившегося движения транспортного средства аналогична рассмотренному.
Управление сцеплением в ситуациях, связанных со сбросом педали управления дроссельной заслонкой карбюратора при незаблокированном полностью сцеплении в диапазоне Σрб < Σωк, vа< Σбл (например с целью торможения или временного ограничения темпа разгона на низших передачах), протекает следующим образом. Потенциал низкого уровня от бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора через инвертирующий выход поступает на первый вход 29 устройства 18 управления запуском генератора 17 одиночных импульсов и инициирует на выходе генератора 17 одиночных импульсов одиночный импульс, вызывающий, как было описано ранее, увеличение ампервитков электромагнита следящего действия до максимального значения IWрб, обеспечивая цикл доразблокировки не заблокированного полностью сцепления в диапазоне Σрб < Σωк, vа< Σбл.
Тем самым исключается возможный останов двигателя и, при необходимости, сохраняется запас инерции транспортного средства в фазе разгона. Управление сцеплением при неисправностях электронной и электрической частей устройства осуществляется в классическом режиме с помощью педали сцепления, связанной через тросовый привод с вилкой выключения сцепления.
Устройство, представленное на фиг. 3, работает следующим образом. При вращении коленчатого вала двигателя на выходе датчика 1 угловой скорости вала двигателя формируется импульсная последовательность с частотой следования, пропорциональной угловой скорости ωк вала двигателя. Эти импульсы поступают на первый вход 33 частотно-аналогового преобразователя 2, где они преобразуются в напряжение постоянного тока и подаются на второй вход 65 устройства 54 суммирования. На первый вход 64 устройства 54 суммирования поступает напряжение с дополнительного частотно-аналогового преобразователя 53, подключенного к выходу датчика 31 скорости транспортного средства, пропорциональное скорости движения транспортного средства. Сигнал с устройства 54 суммирования управляет работой регулятора 3 тока, в результате чего изменяется ток, протекающий в управляющей обмотке 14, а следовательно, и ампервитки (IW) электромагнита следящего действия от значения IWxx (см. фиг. 4), соответствующего сумме значений угловой скорости холостого хода вала двигателя и скорости транспортного средства Σxx до значения IWбл, соответствующего сумме значений угловой скорости вала двигателя и скорости транспортного средства Σбл порога блокировки сцепления. При этом происходит плавное сближение фрикционных элементов сцепления, обеспечивая трогание транспортного средства с места. При достижении скорости транспортного средства Va значения Vбл срабатывает реле 50 управления блокировкой сцепления, выход которого воздействует на второй вход 21 регулятора 3 тока через коммутирующее устройство 55 и вызывает уменьшение ампервитков электромагнита следящего действия до нуля, что обеспечивает полное сцепление фрикционных элементов сцепления, т.е. его блокировку. При этом происходит перенастройка реле 50 управления блокировкой сцепления таким образом, что его возврат в исходное состояние может произойти только при уменьшении скорости транспортного средства до значения Vрб.
При уменьшении скорости транспортного средства Va до значения Vрб, соответствующего порогу разблокировки сцепления по сигналу с выхода реле 50 управления блокировкой сцепления, поступающему на третий вход 35 устройства 18 управления запуском генератора 17 одиночных импульсов, на выходе генератора 17 одиночных импульсов формируется одиночный импульс, который воздействует на ключевой усилитель 16 тока и через первый диод 19 на регулятор 3 тока таким образом, что в управляющей обмотке 14 и форсажной обмотке 15 электромагнита следящего действия ампервитки увеличиваются до максимального значения IWрб, что обеспечивает быстрое выключение сцепления.
По окончании одиночного импульса значение ампервитков электромагнита следящего действия снижается до величины IWуд, при которой обеспечивается надежное удержание сцепления в выключенном состоянии.
Начальный ток плавного включения формируется с учетом состояния бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора. Данный процесс протекает следующим образом.
При отпущенной педали управления дроссельной заслонкой карбюратора напряжение низкого уровня поступает с неинвертирующего выхода бинарного датчика 23 исходного положения педали управления дроссельной заслонкой на второй вход 34 двухвходового частотно-аналогового преобразователя 2, что приводит к понижению величины его выходного напряжения, компенсируя возможное увеличение напряжения при повышении угловой скорости вала двигателя из-за неправильной регулировки карбюратора. После нажатия на педаль управления дроссельной заслонкой карбюратора на второй вход 34 частотно-аналогового преобразователя 2 подается напряжение, разрешающее его работу в определенном режиме. В режиме нормального трогания ампервитки электромагнита следящего действия снижаются до значения IWн начала плавного включения сцепления, Далее значение IWн сохраняется по мере увеличения текущего значения Σωк Va. При достижении Σωк Va значения Σн дальнейшее изменение ампервитков происходит в зависимости от суммарного значения угловой скорости вала двигателя и скорости транспортного средства и не отличается от описанного выше.
Если в процессе разгона вала двигателя будет осуществляться переключение передач, то сигнал принудительного выключения сцепления с выключателя 12 принудительного выключения сцепления, расположенного на рычаге переключения передач, воздействуя на второй вход 30 устройства 18 управления запуском генератора 17 одиночных импульсов, вызывает срабатывание генератора 17 одиночных импульсов. На выходе генератора 17 одиночных импульсов формируется одиночный импульс, описание воздействия которого на узлы устройства приведено выше. В результате происходит увеличение ампервитков электромагнита следящего действия до IWрб. При этом на входе блока 51 перенастройки реле 50 управления блокировкой сцепления формируется сигнал низкого уровня которым реле 50 управления блокировкой сцепления перенастраивается на переход в режим блокировки по сигналу с датчика 31 скорости V'бл в диапазоне Vрб <V'бл <Vбл. В том случае, если скорость транспортного средства больше значения V'бл, происходит срабатывание реле 50 управления блокировкой сцепления и ампервитки электромагнита следящего действия уменьшаются до нуля. Если скорость транспортного средства меньше значения V'бл, то ампервитки (IW) электромагнита следящего действия изменяются в зависимости от изменения Σωк Va по закону, описанному выше. При достижении скорости транспортного средства значения V'бл срабатывает реле 50 управления блокировкой сцепления и ампервитки электромагнита следящего действия уменьшаются до нуля, т.е. сцепление блокируется.
Работа устройства в случае переключения передач в режиме установившегося движения транспортного средства аналогична рассмотренному.
Управление сцеплением в ситуациях, связанных со сбросом педали управления дроссельной заслонкой карбюратора при незаблокированном полностью сцеплении в диапазоне Σрб < Σωк, vа< Σбл (например с целью торможения или временного ограничения темпа разгона на низших передачах) протекает следующим образом.
Потенциал низкого уровня от бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора через инвертирующий выход и элемент 32 "И" (при наличии потенциала высокого уровня с выхода реле 50 управления блокировкой сцепления) поступает на первый вход 29 устройства 18 управления запуском генератора 17 одиночных импульсов и инициирует на выходе генератора 17 одиночных импульсов одиночный импульс, вызывающий, как было описано ранее, увеличение витков электромагнита следящего действия до максимального значения IWрб, обеспечивая цикл доразблокировки неразблокированного полностью сцепления в диапазоне Σрб < Σωк, vа< Σбл
Тем самым исключается возможный останов двигателя и, при необходимости, сохраняется запас инерции транспортного средства в фазе разгона.
Управление сцеплением при неисправностях электронной и электрической систем устройства осуществляется в классическом режиме с помощью педали сцепления, связанной через троссовый привод с вилкой выключения сцепления (не показан).
Устройство, представленное на фиг. 5, работает следующим образом. При вращении коленчатого вала двигателя на выходе датчика 1 угловой скорости вала двигателя формируется импульсная последовательность с частотой следования пропорциональной угловой wK скорости вала двигателя. Эти импульсы поступают на вход схемы 66 сравнения, где они сравниваются с импульсами, сформированными датчиком 31 скорости, частота которых пропорциональна скорости транспортного средства. Импульсная последовательность с выхода схемы 66 сравнения поступает на вход частотно-аналогового преобразователя 2, где она преобразуется в напряжение постоянного тока, которое управляет работой регулятора 3 тока, в результате чего изменяется ток, протекающий в управляющей обмотке 14, а следовательно, и ампервитки (IW) электромагнита следящего действия от значения IWxx (см. фиг.6), соответствующего угловой скорости холостого хода вала двигателя ωк, до значения IWбл, соответствующего угловой скорости ωбл порога блокировки сцепления. При этом происходит плавное сближение фрикционных элементов сцепления, обеспечивая трогание транспортного средства с места. При достижении скорости транспортного средства Va значения Vбл, совпадающего с точностью до 10% с приведенным текущим значением угловой скорости ωк вала двигателя, на выходе частотно-аналогового преобразователя 2 устанавливается напряжение, величина которого достаточна для срабатывания реле 50 управления блокировкой сцепления, выход которого воздействует на первый вход 20 регулятора 3 тока через коммутирующее устройство 55 и вызывает уменьшение ампервитков электромагнита следящего действия до нуля, что обеспечивает полное сцепление фрикционных элементов сцепления, т.е. его блокировку. При этом происходит перенастройка реле 50 управления блокировкой сцепления таким образом, что его возврат в исходное состояние может произойти только при уменьшении скорости транспортного средства Va до значения Vрб. При уменьшении скорости транспортного средства до значения Vрб, соответствующего порогу разблокировки сцепления по сигналу с выхода реле 50 управления блокировкой сцепления, поступающему на третий вход 35 устройства 18 управления запуском генератора 17 одиночных импульсов, на выходе генератора 17 одиночных импульсов формируется одиночный импульс, который воздействуя на ключевой усилитель 16 тока и через первый диод 19 на регулятор 3 тока таким образом, что в управляющей обмотке 14 и форсажной обмотке 15 электромагнита следящего действия ампервитки увеличиваются до максимального значения IWрб, что обеспечивает быстрое выключение сцепления. По окончании одиночного импульса значение ампервитков электромагнита следящего действия снижается до величины IWуд, при которой обеспечивается надежное удержание сцепления в выключенном состоянии.
При отпущенной педали управления дроссельной заслонкой карбюратора напряжение низкого уровня поступает с неинвертирующего выхода бинарного датчика 23 исходного положения педали управления дроссельной заслонкой на второй вход 34 двухвходового частотно-аналогового преобразователя 2, что приводит к понижению величины его выходного напряжения, компенсируя возможное увеличение напряжения при повышении угловой скорости вала двигателя из-за неправильной регулировки карбюратора.
Начальный ток плавного включения формируется с учетом состояния бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора. После нажатия на педаль управления дроссельной заслонкой карбюратора на второй вход 34 частотно-аналогового преобразователя 2 подается напряжение, разрешающее его работу в определенном режиме. В режиме нормального трогания ампервитки электромагнита следящего действия снижаются до значения IWн начала плавного включения сцепления. Далее значение IWн сохраняется по мере увеличения текущего значения угловой скорости вала двигателя. При достижении угловой скорости вала двигателя значения ωн дальнейшее изменение ампервитков происходит в зависимости от угловой скорости вала двигателя, скорости транспортного средства и не отличается от описанного выше.
Если в процессе разгона вала двигателя будет осуществляться переключение передач, то сигнал принудительного выключения сцепления с выключателя 12 принудительного выключения сцепления, расположенного на рычаге переключения передач, воздействуя на второй вход 30 устройства 18 управления запуском генератора 17 одиночных импульсов, вызывает срабатывание генератора 17 одиночных импульсов, на выходе которого формируется одиночный импульс, описание воздействия которого на узлы устройства приведено выше. В результате происходит увеличение ампервитков электромагнита следящего действия до IWрб. При этом на входе блока 51 перенастройки реле 50 управления блокировкой сцепления формируется сигнал низкого уровня, которым реле 50 управления блокировкой сцепления перенастраивается на переход в режим блокировки по сигналу с датчика 31 скорости  в диапазоне
в диапазоне  В том случае, если скорость транспортного средства больше значения V'бл, происходит срабатывание реле 50 управления блокировкой сцепления и ампервитки электромагнита следящего действия уменьшаются до нуля. Если скорость транспортного средства меньше значения V'бл, то ампервитки (IW) электромагнита следящего действия изменяются по закону, описанному выше, в зависимости от угловой скорости вала двигателя. При достижении скорости транспортного средства значения V'бл происходит срабатывание реле 50 управления блокировкой сцепления и ампервитки электромагнита следящего действия уменьшаются до нуля, т.е. сцепление блокируется.
В том случае, если скорость транспортного средства больше значения V'бл, происходит срабатывание реле 50 управления блокировкой сцепления и ампервитки электромагнита следящего действия уменьшаются до нуля. Если скорость транспортного средства меньше значения V'бл, то ампервитки (IW) электромагнита следящего действия изменяются по закону, описанному выше, в зависимости от угловой скорости вала двигателя. При достижении скорости транспортного средства значения V'бл происходит срабатывание реле 50 управления блокировкой сцепления и ампервитки электромагнита следящего действия уменьшаются до нуля, т.е. сцепление блокируется.
Работа устройства в случае переключения передач в режиме установившегося движения транспортного средства аналогична рассмотренному.
Управление сцеплением в ситуациях, связанных со сбросом педали управления дроссельной заслонкой карбюратора при угловой скорости вала двигателя ωрб < ωк < ωбл (например, с целью торможения или временного ограничения темпа разгона на низших передачах), протекает следующим образом.
Потенциал низкого уровня от бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора через инвертирующий выход и элемент 52 "И" (при наличии потенциала высокого уровня с выхода реле 50 управления блокировкой сцепления) поступает на первый вход 29 устройства 18 управления запуском генератора 17 одиночных импульсов и инициирует на выходе генератора 17 одиночных импульсов одиночный импульс, вызывающий, как было описано ранее, увеличение ампервитков электромагнита следящего действия до максимального значения IWрб, обеспечивая цикл доразблокировки не заблокированного полностью сцепления в диапазоне ωрб < ωк < ωбл Тем самым исключается возможный останов двигателя и, при необходимости, сохраняется запас инерции транспортного средства в фазе разгона.
Управление сцеплением при неисправностях электронной и электрической частей устройства осуществляется в классическом режиме с помощью педали сцепления, связанной через троссовый привод с вилкой выключения сцепления (не показан).
Подача разрешающего сигнала на частотно-аналоговый преобразователь 2 и скачкообразное изменение ампервитков при нажатии педали управления дроссельной заслонкой карбюратора позволяет соответственно исключить влияние нестабильной работы карбюратора на холостом ходу на работу устройства, совместить противоречивые требования к ампервиткам разблокировки и ампервиткам плавной регулировки сцепления и получить раздельную оптимизацию этих режимов. Одновременно достигается дополнительное увеличение быстродействия управления сцеплением, уменьшается продолжительность работы сцепления с пробуксовкой без снижения динамических показателей и повышается его долговечность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034719C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044663C1 |
| СИСТЕМА УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2017631C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2321502C2 |
| Устройство автоматического управления сцеплением транспортного средства | 1988 |
|
SU1659251A1 |
| Ручной привод дросселя карбюратора автомобиля для инвалидов | 1989 |
|
SU1717430A1 |
| Устройство переключения передач коробки передач транспортного средства | 1985 |
|
SU1320090A1 |
| Система управления двигателем и коробкой передач транспортного средства | 1985 |
|
SU1320093A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2186238C1 |
| Система управления транспортного средства для инвалидов | 1988 |
|
SU1601007A1 |
Изобретение относится к системам автоматического управления агрегатами транспортного средства и, в частности, сцепления. Сигналы датчика 1 угловой скорости вала двигателя и датчика 3 скорости транспортного средства осуществляют с учетом сигналов выключателя 12 принудительного выключения сцепления и бинарного датчика 23 исходного положения педали управления дроссельной заслонкой карбюратора управление управляющей и форсажной обмотками 14, 15 электромагнита следящего действия, якорь которого кинематически связан с приводом сцепления. 4 з.п. ф-лы, 6 ил.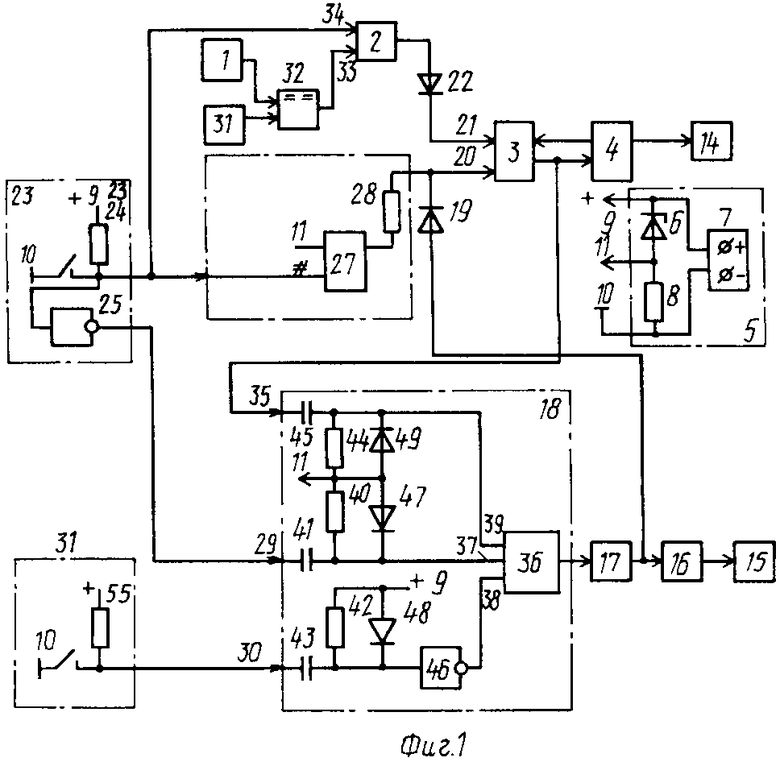
| Устройство для автоматического управления сцеплением транспортного средства | 1980 |
|
SU929471A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
