Настоящее изобретение относится к способу и устройству для обнаружения, отслеживания и/или управления гоночными транспортными средствами на гоночном треке, где соответствующее гоночное транспортное средство отслеживают по меньшей мере одной камерой при пересечении предопределенной секции трека, в частности линии старта и/или финишной линии, при этом изображения, предоставленные камерой, записывают с помощью записывающего устройства.
Подобные устройства для управления и отслеживания особенно часто используют вместе с модельными гоночными треками, в частности так называемыми треками для гоночных автомоделей, но в принципе они также могут быть использованы на настоящих гоночных треках и гоночных транспортных средствах, которые ездят по ним. Разумеется, различные типы транспортных средств, например автомобили или мотоциклы, рассматриваются в качестве гоночных транспортных средств, но в принципе другие гоночные объекты, такие как, например, лошади, гоночные упряжки или водные транспортные средств, такие как гоночные катера, также могут быть оборудованы или отслежены и обнаружены соответствующими устройствами, так что термин "гоночное транспортное средство" в контексте настоящей заявки следует интерпретировать в широком смысле.
Гонки на гоночных треках обычно отслеживают с помощью технических записывающих средств и управляют соответствующими управляющими модулями, что относится, например, к определению количества пройденных кругов и/или времени круга или идентификации соответствующего транспортного средства или водителя, ассоциированного с указанным транспортным средством. Помимо отслеживающих мер, которые уже давно известны, например световых барьеров для определения скорости, отслеживание камерами для определения пересечения финишной линии или т.п., недавно также было предложено отслеживать или управлять транспортными средствами и отслеживать водителей, управляющих ими, а также положение транспортного средства на гоночном треке и время или пройденное расстояние посредством электронной передачи данных из транспортного средства. Например, в документах WO 2006/042235 A2 и US 2006/0183405 A1 предложено прикреплять к транспортным средствам так называемые элементы радиочастотной идентификации, т.е. идентифицирующие компоненты, которые используют радиообмен данными, и сохранять в указанных элементах радиочастотной идентификации идентификатор транспортного средства, идентификатор водителя и, возможно, другие данные транспортного средства и водителя, а также данные гонки, которые затем считывают подходящими считывающими устройствами радиочастотной идентификации, расположенными на гоночном треке, например, таким образом, что каждый раз при пересечении финишной линии считывается элемент радиочастотной идентификации транспортного средства и соответственно увеличивается количество кругов и эти данные сохраняются вместе с идентификатором транспортного средства и идентификатором водителя.
В указанном документе WO 2006/042235 A2 предложено, помимо вышеупомянутых устройств считывания радиочастотной идентификации, помещать проводящие замкнутые цепи или световые прожекторы в проезжую часть для того, чтобы обнаруживать транспортные средства, проезжающие над ними.
При использовании камер для отслеживания секции трека тяжело управлять получаемым потоком изображений и потоком данных в ходе записи и выбирать изображение или несколько изображений из потока, которые представляют интерес и на которых действительно изображено соответствующее событие. Например, высокоскоростные камеры часто используют для отслеживания старта, или финиша, или другой важной секции трека, такой как, например, линии промежуточного времени, холма или склона, для того, чтобы иметь возможность показа интересного гоночного события в повторе или иметь в наличии изображение, на котором действительно изображено гоночное транспортное средство в момент своего прохождения интересующей секции трека. Для гоночных транспортных средств, перемещающихся с очень высокой скоростью, при использовании камер, которые записывают лишь ограниченное количество изображений в секунду, определенно невозможно каким-либо образом снять изображение точно в то время, например, когда передняя часть транспортного средства пересекает финишную линию. С другой стороны, это означает, что создается множество изображений и данных, не представляющих интереса. Запись всех изображений будет требовать большого объема памяти и, кроме этого, дальнейшая оценка изображений затрудняется из-за большого количества изображений и объема данных, которые необходимо проверить или анализировать для того, чтобы выбрать изображение или несколько изображений, на которых действительно изображено событие, которое необходимо отследить.
Система отслеживания с помощью камер для отслеживания финиша на легкоатлетических соревнованиях известна из DE 10336447 A1, где финиширование бегуна обнаруживают с помощью светового барьера и изображения бегуна записывают с помощью камеры во время пересечения финишной линии. Номер соответствующего бегуна, который пересек финишную линию, впоследствии определяют с помощью распознавания изображения. Тем не менее, указанная система отслеживания в конечном итоге непригодна для отслеживания гоночных транспортных средств или не может справиться с соответствующими условиями гонки, поскольку в результате очень низкой скорости бегунов при пересечении финишной линии даже при относительно малом количестве изображений в секунду обычно доступно изображение, на котором действительно изображено пересечение линии финиша. Соответственно, может быть выполнена обработка очень малого количества изображений, которые необходимо сохранить. Для надежного захвата изображения, например пересечения линии финиша для гоночных транспортных средств с намного большими скоростями, камера, например в форме высокоскоростной камеры, должна создавать очень много изображений в секунду, в результате чего происходит обработка очень большого потока изображений и данных. Упомянутая система согласно DE 10336447 A1 не способна выполнять указанную функцию.
Кроме этого, в US 4,183,056 описана система записи изображений для отслеживания ударов теннисного мяча на границе корта или вблизи от нее, где границу корта необходимо сделать чувствительной к давлению для того, чтобы обнаруживать удар мяча и начать запись изображений, постоянно создаваемых камерой. Затем запись снова останавливают после истечения предопределенного временного интервала. Тем не менее, с данной системой связана проблема, которая заключается в том, что интервал записи устанавливают лишь после удара мяча на самой границе и таким образом не могут быть записаны или предоставлены изображения, которые также изображают порядок действий непосредственно перед интересным событием, т.е. не могут быть показаны изображения, на которых изображен данный мяч незадолго до его удара. Кроме этого, при передаче сигнала от границы корта, чувствительной к давлению, соответствующего изображению с камеры, предоставляется метка и записывается вместе с указанным сигналом, так что при последующем воспроизведении метку можно увидеть на изображении и точно определить время удара мяча. Для анализа или оценки изображения подобное связанное хранение соответствующей метки, тем не менее, достаточно лишь при определенных условиях, поскольку возникают большие объемы данных и для соответствующей оценки изображения требуются длительные периоды поиска. Кроме этого, указанная система менее пригодна для отслеживания гоночных транспортных средств, поскольку для автомобильной гонки или мотоциклетной гонки доли секунды после пересечения линии финиша являются менее интересными, но доли секунды перед пересечением финишной линии являются более интересными и таким образом должны быть сохранены.
На основании этого цель настоящего изобретения заключается в предоставлении улучшенного устройства вышеупомянутого типа, которое не содержит недостатков известного уровня техники и может быть в дальнейшем разработано преимущественным образом. В частности, обеспечивается автоматическое высокоточное отслеживание при помощи камеры пересечения секции трека, представляющей интерес, без необходимости сохранения большого количества изображений и данных и без необходимости учитывания утомительных сложных процессов оценивания.
Согласно изобретению указанную цель достигают с помощью устройства по п.1 и способа по п.12. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Таким образом, предложено ограничить запись изображений, предоставленных камерой, определенным временным окном, которое выбирают таким образом, чтобы оно находилось рядом с пересечением секции трека, представляющей интерес, или поблизости от него, и тем самым обнаруживать фактическое пересечение секции трека с помощью сенсорного устройства, которое расположено отдельно от камеры для того, чтобы иметь возможность подходящим образом помечать изображение, полученное во время фактического пересечения секции трека, при условии, что оно находится в пределах указанного временного окна. Согласно изобретению предоставлены устройство управления записью для автоматической записи изображений, предоставленных камерой лишь в пределах определенного временного окна, в пределах которого необходимо определить пересечение секции трека, сенсорное устройство для обнаружения пересечения секции трека и отмечающее устройство для создания отметки на записанном изображении в зависимости от сигнала сенсорного устройства и его воздействия в определенном временном окне. С одной стороны, количество данных, которые необходимо сохранить и оценить, ограничено посредством ограничения записи изображения заданным временным окном. С другой стороны, посредством генерации метки для определенного изображения в зависимости от сигнала датчика, который указывает на пересечение секции трека, представляющей интерес, и сохранения указанной метки в списке событий значительно упрощает нахождение итогового изображения, представляющего интерес, поскольку изображение, связанное с соответствующей меткой, необходимо выбирать лишь из сохраненных изображений, так что для воспроизведения события гонки, представляющего интерес, необходимо воспроизвести лишь отмеченное изображение и, возможно, некоторые изображения или последовательности изображений, которые были записаны перед и после отмеченного изображения. В данном случае в изображениях не нужно проводить поиск на наличие метки, а лишь необходимо просмотреть список событий, в котором расположены соответствующие метки. После использования метки, считанной из списка меток, затем может быть выбрано изображение, связанное с ней, при этом данное изображение затем отображает соответствующее событие, такое как, например, пересечение линии финиша. Хранение меток отдельно от связанных изображений или изображений, скомбинированных с ними в списке событий, значительно снижает количество данных, которые необходимо обработать в ходе оценки гонки и соответственно сокращает время доступа и время оценки.
Соответственно, для отслеживания гоночного трека также может быть использовано множество камер и/или высокоскоростных камер, которые создают большой поток изображений без задержки процесса сохранения и оценки. С другой стороны, простое отслеживание верной процедуры гонки может быть достигнуто посредством указанной технологии создания меток и ее взаимодействия с записью в определенном временном окне, поскольку изображения, записанные в соответствующем временном окне, необходимо лишь проверить на наличие в одном из изображений соответствующей метки. Другими словами, если ни одно из записанных изображений не содержит метки, можно сделать вывод, что соответствующее событие не произошло в пределах предопределенного временного окна. В частности, это может быть использовано для определения фальстартов или преждевременных стартов.
В развитии изобретения устройство управления записью может различными способами определять временное окно, в пределах которого записываются изображения, предоставленные камерой. С данной целью управляющее устройство может содержать различные определяющие устройства для определения начала и конца временного окна. В частности, управляющее устройство может содержать определяющее устройство для автоматического определения начала и конца временного окна в зависимости от положения гоночного транспортного средства и/или события гонки.
В преимущественном развитии изобретения устройство управления записью может определять указанное временное окно в зависимости от сигнала старта и/или от сигнала подготовки к старту, где для определения временного окна могут учитываться, например, световые сигналы старта. Преимущественно, указанное определяющее устройство может содержать средства обнаружения для обнаружения сигнала подготовки к старту и/или сигнала старта, а также таймер или управляющее устройство отсчета времени для вывода конечного сигнала для временного окна после истечения предопределенного временного интервала, следующего за обнаружением сигнала подготовки к старту и/или сигнала старта. Например, при использовании светового сигнала старта, известного из Формулы 1, в котором возрастающее количество красных сигналов изначально горят для отображения подготовки к старту и затем сигнал старта обозначается зеленым сигналом, указанное временное окно может быть открыто с одним из красных сигналов и вновь закрыто после истечения предопределенного временного интервала после включения зеленого сигнала. С другой стороны, если, например, на треке для гоночных автомоделей подача энергии к треку начинается лишь незадолго перед выводом сигнала старта, то временное окно может быть открыто или запущено для записи изображений камерой указанным определяющим устройством, если соответствующие средства обнаружения напряжения и/или силы тока обнаруживают подачу электроэнергии к контактам подачи энергии трека для гоночных автомоделей.
В развитии изобретения, временное окно для процесса старта таким образом открывают в предопределенном временном интервале перед фактическим сигналом старта, например, посредством обнаружения красного сигнала светофора или активации подачи энергии к треку для гоночных автомоделей, где преимущественно указанное временное окно снова закрывают с выводом сигнала старта или сразу после вывода сигнала старта, так что обычное пересечение линии старта, следующее за выводом сигнала старта, больше не обнаруживается или метка больше не наносится на записанные изображения. Таким образом, количество данных может быть дополнительно сокращено или обеспечивается простое обнаружение преждевременного старта, поскольку при оценке записанных изображений метка не обнаруживается, что позволяет вывести надлежащий процесс старта. В частности, с данной целью указанное временное окно для записи изображений при помощи камеры снова закрывается посредством сигнала старта перед истечением временного интервала обычной реакции человека. Например, указанное временное окно может быть снова закрыто через несколько долей секунды после вывода сигнала старта, например после 100 мс. Каждый соответствующий процесс старта, содержащий время реакции человека, приводит к фактическому пересечению линии старта в тот момент времени, который находится за пределами указанного временного окна. Соответственно, сенсорное устройство выводит сигнал, обозначающий пересечение, лишь после окончания записи, так что следующие записанные изображения не могут быть отмечены отмечающим устройством.
Согласно дальнейшему преимущественному варианту осуществления изобретения указанное временное окно также может быть определено другим образом, в частности, для определения пересечения линии старта или записи промежуточного времени, и с этой целью указанное устройство управления записью содержит подходящее определяющее устройство, спроектированное другим образом, для определения временного окна. В преимущественном развитии изобретения, указанное определяющее устройство может содержать средства обнаружения для обнаружения приближения гоночного транспортного средства к предопределенной секции трека и средства обнаружения для обнаружения удаления гоночного транспортного средства от предопределенной секции трека и может определить указанное временное окно для записи изображений, предоставленных камерой, в зависимости от сигналов указанных средств обнаружения. В качестве альтернативы или дополнения, определяющее устройство также может содержать таймер или управляющее устройство отсчета времени, которое определяет окончание временного окна после истечения предопределенного временного интервала от обнаружения приближения гоночного транспортного средства к секции трека. Например, если указанными средствами обнаружения приближения обнаружено, что гоночное транспортное средство достигло или пересекло предопределенную секцию перед секцией трека, представляющей интерес, то из этого можно сделать вывод, что для нормального режима работы секция трека, представляющая интерес, была пересечена в пределах предопределенного временного интервала. Тем не менее, определение временного окна с помощью как обнаружения приближения, так и обнаружения удаления гоночного транспортного средства, является более точным и не зависит от скорости, где указанный таймер тем не менее может быть использован для выполнения проверки вероятности обнаружения приближения и обнаружения удаления гоночного транспортного средства к или от предопределенной секции трека.
В преимущественном развитии изобретения, приближение и удаление гоночного транспортного средства к или от секции трека, представляющей интерес, может быть обнаружено посредством датчиков, расположенных на гоночном треке перед и после указанной секции трека. Сигнал датчика, расположенного перед секцией трека, указывает на приближение гоночного транспортного средства, в то время как датчик, расположенный после секции трека, представляющей интерес, указывает на удаление гоночного транспортного средства от указанной секции трека. Указанные сигналы датчиков могут быть использованы в качестве инициирующего сигнала для начала записи или для окончания записи изображений, предоставленных камерой.
Указанные датчики в данном случае могут иметь принципиально различную конструкцию, где в преимущественном развитии изобретения индуктивные датчики расположены перед или после секции трека, которую необходимо отслеживать для того, чтобы обнаружить приближение или удаление гоночного транспортного средства к или от указанной секции трека. Оптический датчик, например, в форме светового барьера, также может быть использован в качестве альтернативы или дополнения к подобному индуктивному датчику. Для того чтобы иметь возможность обнаружения не только приближения или удаления гоночного транспортного средства как такового, но также иметь возможность записи непрерывной информации, также могут быть использованы интеллектуальные датчики, в частности, в форме считывающего устройства радиочастотной идентификации и/или считывающего устройства штрихкодов, так что может быть обнаружено не только приближение или удаление гоночного транспортного средства, но также может быть идентифицировано приближающееся или удаляющееся гоночное транспортное средство путем считывания элемента радиочастотной идентификации или элемента штрихкода, прикрепленного к транспортному средству.
Подобно указанным датчикам для определения временного окна для записи изображений, предоставленных камерой, сенсорное устройство для определения фактического пересечения секции трека, которую необходимо отслеживать, также может иметь другую конструкцию. Преимущественно, указанное сенсорное устройство для обнаружения пересечения секции трека, которую необходимо отслеживать, может содержать оптический датчик предпочтительно в форме светового барьера, который может с высокой точностью определить момент пересечения и может достаточно быстро предоставить соответствующий сигнал датчика. Тем не менее, в качестве альтернативы или дополнения, указанное сенсорное устройство также может содержать другие датчики, такие как, например, индуктивные датчики, или даже указанное считывающее устройство радиочастотной идентификации, или считывающее устройство штрихкодов, для того, чтобы также идентифицировать транспортное средство. Тем не менее, для того чтобы иметь возможность измерения прохождения гоночного транспортного средства с достаточной точностью и для достаточно быстрого предоставления сигнала датчика, указанный оптический датчик в форме светового барьера является особенно преимущественным. Указанные другие датчики, например считывающие устройства радиочастотной идентификации или считывающие устройства штрихкодов, преимущественно могут быть предоставлены в качестве дополнения для того, чтобы предоставить возможность идентификации транспортного средства.
В преимущественном развитии изобретения, указанные сенсорные устройства для обнаружения приближения и удаления гоночных транспортных средств и обнаружения точного пересечения секции трека, представляющей интерес, могут быть интегрированы в проезжую часть и/или расположены под проезжей частью. В данном случае для обеспечения простой установки указанные сенсорные устройства могут быть установлены на общей опоре датчиков, которая предпочтительно может быть вставлена в боковом направлении от края проезжей части в приемное пространство под проезжей частью.
Для того чтобы иметь возможность ограничения последующего воспроизведения записанных изображений фактическими изображениями, представляющими интерес, в развитии изобретения может быть предоставлено устройство управления воспроизведением для автоматического воспроизведения записанных изображений, которое содержит устройство для считывания меток, которое считывает или обнаруживает метки, присоединенные к изображениям. С помощью подходящих средств выбора устройство управления воспроизведением затем может выбрать сохраненные изображения, содержащие метку, где последовательности изображений, сохраненные незадолго до и после отмеченного изображения, необязательно могут быть выбраны вместе с ним и отображены. Преимущественно, устройство управления воспроизведением может управлять воспроизведением записанных изображений в зависимости от считанных меток, в частности, таким образом, что последовательности изображений, выбранные для воспроизведения, затем могут быть замедлены или остановлены в виде замедленного движения при воспроизведении отмеченного изображения. В качестве альтернативы или дополнения, перемотка и повторное воспроизведение соответствующей последовательности изображений также могут быть выполнены при воспроизведении отмеченного изображения, например, для того, чтобы второй раз показать пересечение линии финиша.
Далее изобретение будет подробно описано с помощью предпочтительного примера варианта осуществления и связанных графических материалов. На графических материалах изображены:
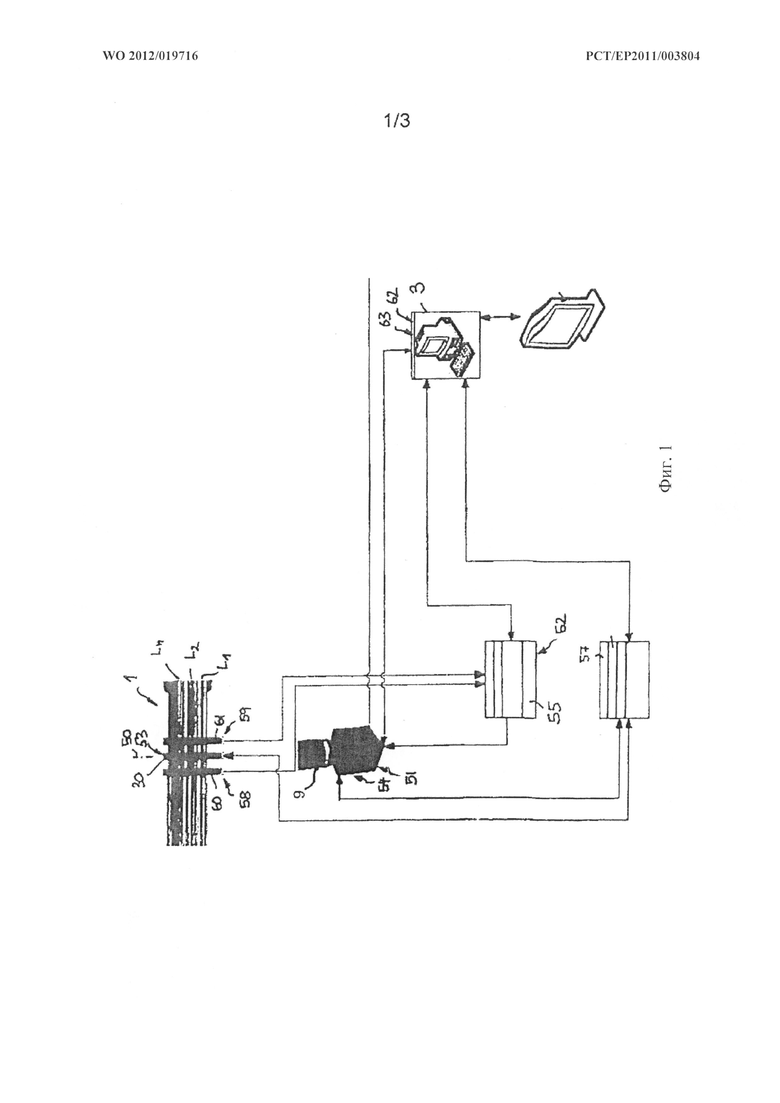
На фиг.1 изображен схематический вид отслеживающего устройства для отслеживания гоночных транспортных средств на гоночном треке согласно преимущественному варианту осуществления изобретения, который изображает взаимодействие камеры для отслеживания пересечения линии старта и пересечения линии финиша и управляющие элементы для управления записью изображений, предоставленных камерой, и повторным воспроизведением записанных изображений.
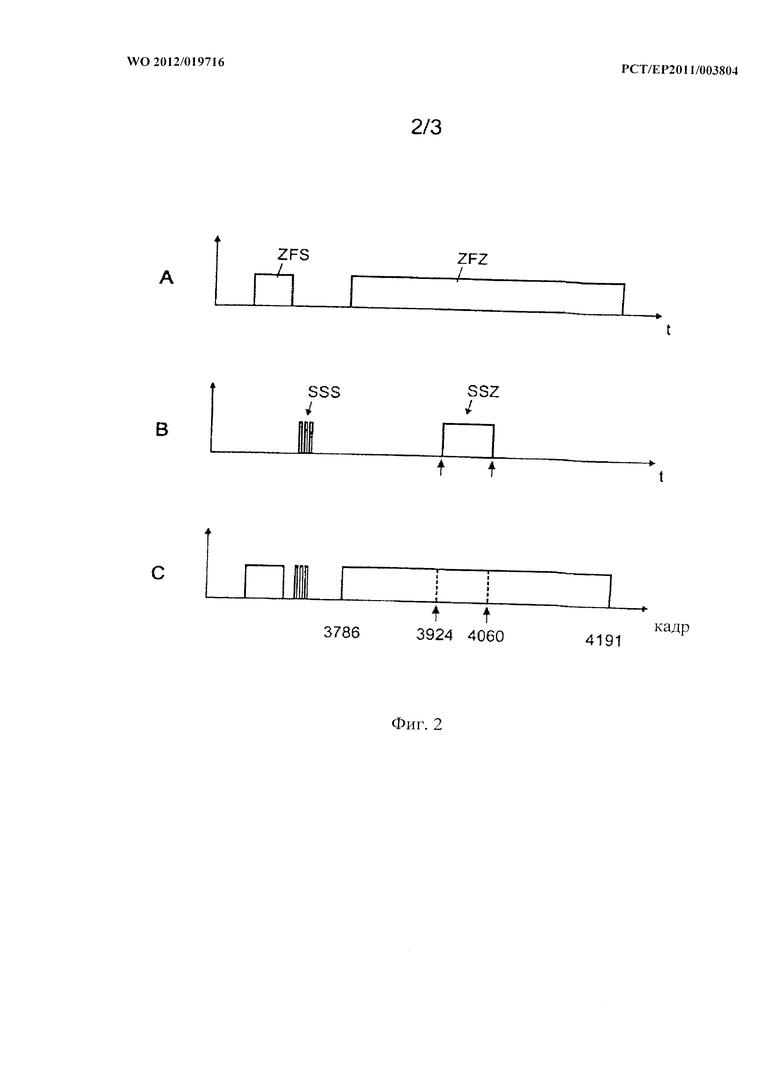
На фиг.2 изображена временная диаграмма для иллюстрации временного окна, в пределах которого записываются изображения из камеры системы по фиг.1 и инициирующие сигналы, при появлении которых отмечаются отдельные изображения, и
На фиг.3 изображен схематический вид многополосного гоночного трека, его отслеживание посредством множества камер и присоединение отслеживающего устройства из фиг.1.
Гоночный трек 1, изображенный на фиг.3, содержит множество полос L1, L2, Ln и преимущественно может иметь форму так называемого трека для гоночных автомоделей, на котором гоночные транспортные средства V1, V2, Vn, содержащие токосъемы, ездят по полосам, при этом указанные полосы встроены в проезжую часть гоночного трека 1. Обычным образом линии подачи энергии встроены в указанные полосы (не изображены подробно), при этом подача тока или напряжения к ним может управляться управляющим устройством C1, C2, Cn, соединенным с ними, где подача тока или напряжения каждой полосе L1, L2, Ln может управляться или регулироваться независимо от других полос.
Как изображено на фиг.3, гоночный трек 1 в изображенном варианте осуществления содержит две связанные с ним камеры 7 и 8, которые отслеживают различные секции гоночного трека 1 для того, чтобы иметь возможность трансляции каждой гонки в форме телевизионного изображения, как будет объяснено далее.
Преимущественно, участники могут зарегистрироваться на гоночном треке 1 с помощью центрального компьютера 3. Гонка может быть проведена в различных версиях, например, ее цель может заключаться в определении наиболее быстрого водителя в каждом случае, то есть того водителя, который первым провел гоночное транспортное средство, управляемое им, по определенной секции гоночного автомобильного трека. В качестве альтернативы или дополнения, количество кругов, пройденных за предопределенное время, может определять результат гонки.
Вначале каждого из участников T1, T2, Tn закрепляют за запоминающим устройством TS1, TS2, TSn участника предпочтительно в форме карты радиочастотной идентификации с соответствующим идентификатором TID1, TID2, TIDn водителя, где перед гонкой происходит регистрация каждого участника с помощью подходящего приемного устройства и/или считывающего устройства, например в форме считывающего устройства радиочастотной идентификации, считывающего соответствующее запоминающее устройство TS1, TS2, TSn участника, где определяют соответствующий закрепленный идентификатор TID водителя, и указанный идентификатор сохраняют в первой области запоминающего устройства центральной базы данных.
Кроме этого, гоночные транспортные средства V1, V2, Vn оснащены соответствующим запоминающим устройством S1, S2, Sn транспортного средства предпочтительно в форме элемента радиочастотной идентификации, за которым закреплен соответствующий идентификатор транспортного средства. На дальнейшем этапе подобным образом перед проведением гонки выполняют регистрацию идентификаторов транспортных средств путем считывания запоминающего устройства S1, S2, Sn транспортного средства посредством подходящего приемного устройства и/или считывающего устройства, где идентификаторы транспортных средств определяют и передают в указанную базу данных, где их размещают во второй области запоминающего устройства.
После успешной регистрации гоночных транспортных средств V1, V2, Vn и участников Т1, Т2, Tn центральный компьютер 3 автоматически выполняет закрепление участников за гоночными транспортными средствами перед началом гонки и отображает указанное закрепление на дисплее. Для этого компьютер 3 может содержать генератор случайных чисел, который выполняет закрепление участников за гоночными транспортными средствами на случайной основе.
Преимущественно, компьютер 3 также автоматически выполняет закрепление гоночных транспортных средств за соответствующими полосами, где преимущественно указанное закрепление за полосами также может быть выполнено генератором случайных чисел на случайной основе. Указанное закрепление также отображают на дисплее перед началом гонки.
Согласно предопределенному закреплению и выбору гоночные транспортные средства V1, V2, Vn затем должны быть помещены на соответствующие полосы L1, L2, Ln гоночного трека 1. Верное размещение гоночных транспортных средств отслеживается с помощью соответствующих запоминающих устройств транспортных средств, предоставленных на транспортных средствах, где преимущественно за соответствующими полосами L1, L2, Ln закреплены приемные устройства/считывающие устройства R1, R2, Rn, например, данные устройства встроены в полосы или прикреплены к ним для того, чтобы считывать запоминающее устройство S1, S2, Sn транспортного средства, расположенного на соответствующей полосе. Указанные приемные устройства/считывающие устройства R1, R2, Rn отслеживают идентификатор транспортного средства и перенаправляют его в устройство активации, которое может быть расположено в компьютере или указанных управляющих устройствах C1, С2, Cn. Если верное транспортное средство находится на верной полосе, то соответствующую полосу и соответствующее транспортное средство активируют.
Кроме этого, у управляющих устройств C1, С2, Cn запоминающее устройство TS1, TS2, TSn участников, к которым применено соответствующее управляющее устройство С1, С2, Сп, считывается посредством приемных устройств/считывающих устройств Р1, Р2, Pn, предоставленных там. Это может быть осуществлено, например, таким образом, что соответствующий участник вставляет свою карту радиочастотной идентификации в соответствующее управляющее устройство Р1, Р2, Pn или обеспечивает бесконтактную связь с ней. Считанные идентификаторы TID1, TID2, TIDn участников затем отправляют в указанное устройство активации для сравнения там с закреплением, предопределенным компьютером 3. Если верный участник находится у верного управляющего устройства, то соответствующее управляющее устройство активируют.
Если все участники находятся у предопределенных управляющих устройств С1, С2, Cn и если все гоночные транспортные средства V1, V2, Vn находятся на верных полосах, то компьютер 3 может генерировать соответствующий сигнал старта, который отображается подходящим образом.
На фиг.1 и 2 подробно изображено устройство для управления камерой 7 по фиг.3 и для записи и повторного выбора соответствующих изображений.
Сперва указанный компьютер 3 генерирует сигнал подготовки к старту, например, путем переключения светофора на красный сигнал и/или путем активации подачи энергии к гоночному треку 1. Компьютер 3 отправляет указанный сигнал подготовки к старту в устройство 52 управления записью, которое управляет моментом записи камеры 7. При обнаружении сигнала подготовки к старту указанную камеру 7 активируют или изображения, предоставленные камерой, записывают в записывающем устройстве 51, которое может быть интегрировано в камеру.
Компьютер 3 затем подает фактический сигнал старта, например, путем переключения светофора на зеленый сигнал. Указанный сигнал в свою очередь обрабатывается указанным устройством 52 управления записью, а именно таким образом, что временное окно для записи изображений, предоставленных камерой, которое было открыто ранее с сигналом подготовки к старту, закрывают. Это преимущественно может происходить со смещением во времени, где смещение во времени может быть задано таймером 57. Например, может быть предоставлена задержка, равная приблизительно 100 мс от сигнала старта. Таким образом, любой преждевременный старт будет надежно записан в записывающем устройстве 51, при этом не будут сохранены ненужные изображения, если все транспортные средства начнут движение обычным образом.
Фактическое пересечение линии 50 старта обнаруживается сенсорным устройством 53, которое, например, может содержать датчик 30, предоставленный на линии 50 старта, который, например, может иметь форму оптического датчика и/или светового барьера. Например, фотодатчик может быть расположен в приемном пространстве под проезжей частью, при этом данный фотодатчик отслеживает пересечение линии 50 старта с помощью прозрачного окна датчик в проезжей части, где указанный фотодатчик 30 работает в качестве фоторезистора, или фотодиода, или фототранзистора, который работает благодаря использованию внутреннего фотоэлектрического эффекта, или в качестве электровакуумного фотоэлемента, или фотоумножителя, или в виде пироэлектрического датчика, который работает благодаря использованию переноса зарядов, вызванного изменением температуры при поглощении света.
При пересечении линии 50 старта указанное сенсорное устройство 53 предоставляет соответствующий сигнал датчика, который используется отмечающим устройством 54 для создания отметки изображения, записанного в соответствующий момент. Тем не менее, если указанное изображение находится за пределами ранее описанного временного окна, то создание отметки не выполняется, т.е. при нормальном старте ни одно изображение не отмечают. На фиг.2 также изображен указанный ход процесса записи изображений и инициирующие сигналы от сенсорного устройства 53, где на временной шкале A изображено временное окно ZFStart, соответствующее фазе преждевременного старта, в ходе которой записываются изображения, предоставленные камерой. Сигналы SSStart датчиков расположены во времени сразу после указанного временного окна, так что создание отметок не происходит. На указанной фиг.2 на местном виде B изображен соответствующий датчик или инициирующий сигнал, в то время как на местном виде C изображена полная информация.
При пересечении финишной линии временное окно ZFFinish определяют определяющим устройством 55 с помощью средств 58 и 59 обнаружения, которые указывают на приближение гоночных транспортных средств к финишной линии 50, а также удаление от финишной линии, следующее за пересечением. Как изображено на фиг.1, датчики 60 и 61 с данной целью расположены на гоночном треке 1 на небольшом расстоянии перед финишной линией 50 и на небольшом расстоянии после финишной линии, в частности под поверхностью проезжей части, где указанные датчики могут иметь форму, например, индуктивных датчиков. Если первое гоночное транспортное средство проходит датчик 60 приближения, это предоставляет сигнал, который используется устройством 52 управления записью для активации камеры 7 или записывающего устройства 51. Если последнее гоночное транспортное средство затем пересекает финишную линию и датчик 61 удаления после финишной линии 50, то устройство 52 управления записью использует соответствующий сигнал датчика для того, чтобы закрыть временное окно для записи и закончить запись.
В пределах указанного временного окна ZFFinish для пересечения линии финиша, определенного посредством определяющего устройства 55, затем предоставляют сигналы SSFinish датчиков с помощью ранее упомянутого датчика 30 со световым барьером, если гоночные транспортные средства фактически пересекают финишную линию 50. Указанные инициирующие сигналы изображены на фиг.2 на временной шкале B и на временной шкале С и обозначают в изображенном варианте осуществления пересечение линии финиша первым гоночным транспортным средством и вторым гоночным транспортным средством.
Указанное отмечающее устройство 54 снабжает меткой изображения "3924" и "4060", записанные в соответствующие моменты времени.
Повторным воспроизведением записанных изображений управляет управляющий компьютер 3. Указанный компьютер 3 регистрирует пересечения линии финиша посредством блока 65 измерения времени, который соединен с указанными датчиками 30 пересечения финишной линии. Если автомобили находятся на финише, то компьютер 3 отправляет запрос камере 7 или записывающему устройству 51 относительно произошедших событий. Указанный запрос предоставляет список событий, изображенный в пределах установленного времени, как изображено на фиг.2, местном виде С. Управляющий компьютер 3 затем может воспроизвести требуемые изображения, где метки, считанные устройством 63 для считывания меток, на изображениях могут быть использованы устройством 62 управления воспроизведением при воспроизведении, например лишь при пересечении линии финиша транспортным средством для остановки, или для задержки, или для перемотки назад последовательности изображений и воспроизведения ее заново.

Изобретение относится к устройству и способу для обнаружения, отслеживания и/или управления гоночными транспортными средствами на гоночном треке. Гоночное транспортное средство отслеживают с помощью по меньшей мере одной камеры при пересечении предопределенной секции трека. Изображения, предоставленные камерой, записывают в записывающем устройстве, где изображения, предоставленные камерой, записывают в пределах определенного временного окна, в пределах которого необходимо определить пересечение секции трека. Фактическое пересечение предопределенной секции трека обнаруживают посредством сенсорного устройства, расположенного отдельно от камеры, и сигнал сенсорного устройства выводят в момент езды по упомянутой предопределенной секции трека, при этом снабжают меткой изображение, полученное камерой в момент появления сигнала сенсорного устройства. Сигнал сенсорного устройства выводят в пределах упомянутого определенного временного окна, а метку, связанную с соответствующим изображением, сохраняют в списке событий. Затем указанную метку считывают считывателем для выбора изображения, связанного с меткой, из изображений, предоставленных камерой. Технический результат - сокращение времени доступа. 3 н. и 10 з.п. ф-лы, 3 ил.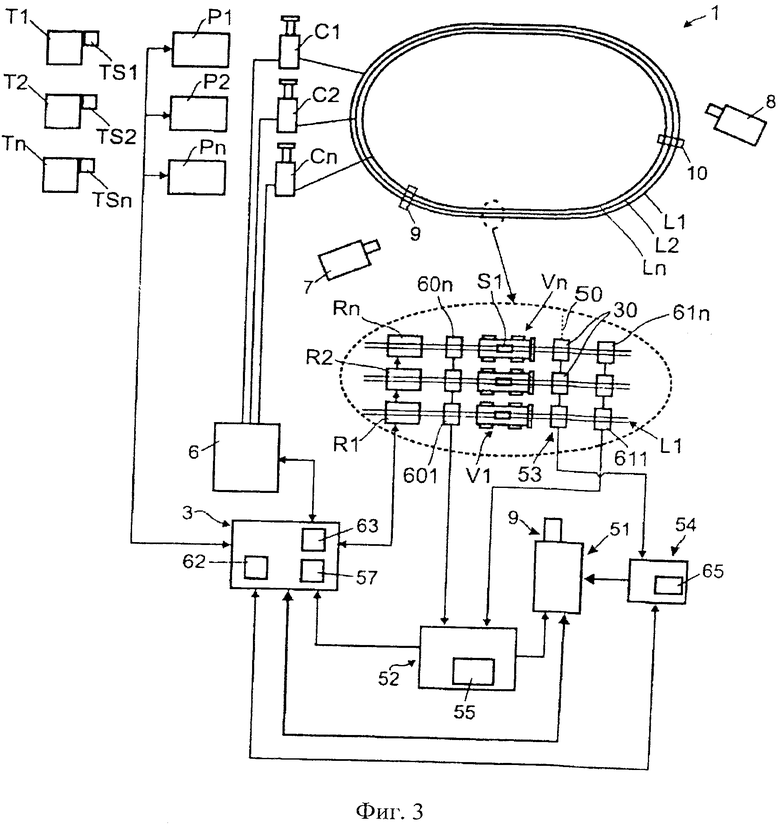
1. Способ обнаружения, отслеживания и/или управления гоночными транспортными средствами на гоночном треке, где соответствующее гоночное транспортное средство отслеживают с помощью по меньшей мере одной камеры при пересечении предопределенной секции трека и изображения, предоставленные камерой, записывают в записывающем устройстве, где изображения, предоставленные камерой, записывают лишь в пределах определенного временного окна, в пределах которого необходимо определить пересечение секции трека, где фактическое пересечение предопределенной секции трека обнаруживают посредством сенсорного устройства, расположенного отдельно от камеры, и сигнал сенсорного устройства выводят в момент езды по упомянутой предопределенной секции трека, при этом снабжают меткой изображение, полученное камерой в момент появления сигнала сенсорного устройства, причем сигнал сенсорного устройства выводят в пределах упомянутого определенного временного окна, и эту метку, связанную с соответствующим изображением, сохраняют в списке событий, причем указанную метку затем считывают считывателем для выбора изображения, связанного с меткой, из изображений, предоставленных камерой.
2. Устройство для обнаружения, отслеживания и/или управления гоночными транспортными средствами на гоночном треке, содержащее по меньшей мере одну камеру для отслеживания пересечения предопределенной секции трека, записывающее устройство для записи изображений, предоставленных камерой, устройство управления записью для автоматической записи изображений, предоставленных камерой лишь в пределах предопределенного временного окна, в пределах которого необходимо определить пересечение секции трека, а также сенсорное устройство для обнаружения пересечения предопределенной секции трека и предоставления сигнала сенсорного устройства во время езды по упомянутой предопределенной секции трека, при этом устройство содержит отмечающее устройство (54) для создания метки для изображения камеры в момент возникновения сигнала сенсорного устройства, причем указанный сигнал сенсорного устройства возникает в пределах упомянутого предопределенного временного окна, и средства хранения для хранения по меньшей мере одной метки в списке событий.
3. Устройство по п. 2, где по меньшей мере одна метка представляет собой номер изображения для отдельного изображения и благодаря использованию номера изображения, считанного из списка событий, может быть выбрано изображение, связанное с указанным номером изображения, на котором изображено пересечение секции трека.
4. Устройство по п. 2, где устройство управления записью содержит определяющее устройство для автоматического определения начала и конца временного окна в зависимости от положения гоночного транспортного средства и/или события гонки.
5. Устройство по п. 4, где определяющее устройство содержит средства обнаружения для обнаружения сигнала подготовки к старту и/или сигнала старта, а также таймер для вывода конечного сигнала после истечения предопределенного временного интервала, следующего за обнаружением сигнала подготовки к старту и/или обнаружением сигнала старта.
6. Устройство по п. 5, где средства обнаружения для обнаружения сигнала подготовки к старту содержат датчик силы тока и/или напряжения для обнаружения подачи тока к полосам гоночного трека.
7. Устройство по п. 5, где временное окно содержит стартовое время перед сигналом старта, во время или после сигнала подготовки к старту и конечное время после сигнала старта, но перед истечением предопределенного временного интервала реакции.
8. Устройство по п. 4, где определяющее устройство содержит средства обнаружения для обнаружения приближения гоночного транспортного средства на предопределенной секции трека и средства обнаружения для обнаружения удаления гоночного транспортного средства от предопределенной секции трека и временное окно может быть определено в зависимости от сигналов указанных средств обнаружения.
9. Устройство по п. 8, где средства обнаружения содержат датчики, расположенные на гоночном треке перед и после предопределенной секции трека в направлении движения для обнаружения пересечения и/или прохождения гоночного транспортного средства.
10. Устройство по п. 9, где указанные датчики содержат индуктивный датчик, и/или считывающее устройство радиочастотной идентификации, и/или оптический датчик.
11. Устройство по п. 2, где сенсорное устройство для обнаружения пересечения предопределенной секции трека содержит датчик между средствами обнаружения для обнаружения приближения и удаления гоночного транспортного средства по направлению к и/или от секции трека.
12. Устройство по п. 2, где сенсорное устройство для обнаружения пересечения предопределенной секции трека содержит оптический датчик в форме светового барьера.
13. Устройство для отображения записанных изображений, снабженных меткой с помощью устройства по п. 2, где устройство управления воспроизведением для автоматического отображения записанных изображений содержит устройство для считывания меток, предназначенное для считывания меток, связанных с изображениями, и средство выбора для выбора изображений, которые будут воспроизведены, из сохраненных изображений, используя сигнал устройства для считывания меток.
| US 6542183 B1, 01.04.2003 | |||
| US 5194861 A, 16.03.1993 | |||
| US 2004095228 A1, 20.05.2004 | |||
| US 5241487 A, 31.08.1993. |

