Изобретение относится к космонавтике, а именно к управлению ориентацией и движением центра масс космических аппаратов (КА).
Известен способ управления космическим аппаратом [1], снабженным реактивными двигателями (РД), с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг. В этом способе к корпусу КА прикладывают требуемый управляющий момент одновременно по трем осям связанного базиса путем установки РД в параллельных плоскостях и включения тех из них, проекции векторов управляющих моментов которых на ось требуемого управляющего момента суммируются, а относительно остальных осей связанного базиса взаимно компенсируются. Кроме того, осуществляют коррекцию орбиты КА по каждому из двух заданных направлений, совпадающих с направлением осей связанного базиса, путем приложения тяг реактивных двигателей для отработки импульсов, заданных в соответствии с направлением и величиной векторов линейной скорости коррекции, по указанным осям. Причем для компенсации возмущающих моментов относительно третьей оси связанного базиса прикладывают управляющие моменты от расположенных в тех же плоскостях РД, проекции векторов моментов которых на указанные первую и вторую оси связанного базиса и проекции их сил тяг на эти оси взаимно компенсируются.
При уменьшении числа включений РД и затрат топлива на коррекцию орбиты КА этот способ управления не решает вопрос получения максимальной скорости коррекции.
Наиболее близкий из аналогов способ управления КА с помощью исполнительных реактивных органов [2], используемый в качестве прототипа, включает определение требуемого значения скорости коррекции орбиты КА, определение интервала времени (t0, tk) для проведения одноимпульсной коррекции орбиты, поддержание заданной ориентации КА с помощью силовых гироскопов (СГ) в процессе коррекции орбиты РД. При этом измеряют значения вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости КА.
Определение n групп реактивных двигателей, состоящих из тех реактивных двигателей, векторы тяг которых обеспечивают заданное направление коррекции орбиты. Прогноз изменения суммарного вектора кинетического момента космического аппарата  на определенном интервале времени коррекции орбиты для каждой из n групп, где
на определенном интервале времени коррекции орбиты для каждой из n групп, где  - начальное значение суммарного вектора кинетического момента космического аппарата, определенное по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата,
- начальное значение суммарного вектора кинетического момента космического аппарата, определенное по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата,  - изменения кинетического момента космического аппарата на определенном интервале коррекции при использовании n-й группы реактивных двигателей с учетом влияния на космический аппарат внешних возмущающих моментов и моментов от сил каждого i-го реактивного двигателя, входящего в n-ю группу. Определение по выполнению условия
- изменения кинетического момента космического аппарата на определенном интервале коррекции при использовании n-й группы реактивных двигателей с учетом влияния на космический аппарат внешних возмущающих моментов и моментов от сил каждого i-го реактивного двигателя, входящего в n-ю группу. Определение по выполнению условия  момента времени tSn выхода вектора суммарного кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений. Определение для каждой из n-х групп интервала времени Δtn=tSn-t0 выхода суммарного вектора кинетического момента на границу указанной области S.
момента времени tSn выхода вектора суммарного кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений. Определение для каждой из n-х групп интервала времени Δtn=tSn-t0 выхода суммарного вектора кинетического момента на границу указанной области S.
Определение величины импульсов коррекции  для каждой из n-х групп двигателей, где
для каждой из n-х групп двигателей, где  - суммарное значение проекций тяг i-х реактивных двигателей n-й группы на направление коррекции орбиты. Выбор для коррекции орбиты из условия максимизации импульса
- суммарное значение проекций тяг i-х реактивных двигателей n-й группы на направление коррекции орбиты. Выбор для коррекции орбиты из условия максимизации импульса  n'-й группы реактивных двигателей. Включение в момент времени t0 выбранной группы реактивных двигателей. Сравнение в процессе коррекции орбиты значения суммарного кинетического момента
n'-й группы реактивных двигателей. Включение в момент времени t0 выбранной группы реактивных двигателей. Сравнение в процессе коррекции орбиты значения суммарного кинетического момента  для указанной n'-й группы реактивных двигателей с текущими значениями вектора
для указанной n'-й группы реактивных двигателей с текущими значениями вектора  и продолжение коррекции орбиты в случае выполнения условия
и продолжение коррекции орбиты в случае выполнения условия  , где
, где  - суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, а в противном случае прекращение коррекции орбиты.
- суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, а в противном случае прекращение коррекции орбиты.
Недостатком способа управления, описанного в прототипе, является то, что для проведения коррекции орбиты выбирается один интервал с фиксированными моментами времени начала и конца при наличии других вариантов выполнения коррекции орбиты КА. В рассмотренном способе маневр начинается при тех начальных условиях по кинетическому моменту, которые сложились на момент начала коррекции. В таком случае одним выбором РД из числа установленных на борту КА не всегда возможно максимально увеличить величину импульса коррекции с минимальным числом включений РД. Необходимость выработки скорости коррекции в полном объеме на одном интервале может привести к увеличению числа включений РД при уменьшении длительности их работы, что в конечном счете ведет к повышенной выработке ресурса РД по числу включений на каждом маневре. А это в целом при выполнении программы полета, содержащей сотни коррекций, сокращает срок эксплуатации КА.
Техническим результатом предлагаемого способа является увеличение величины импульса коррекции включаемых РД с направленными под углом к осям связанного базиса и смещенными относительно центра масс КА линиями действия тяг при использовании СГ для угловой стабилизации КА и уменьшения тем самым числа включений РД.
Технический результат достигается тем, что в предлагаемом способе управления КА с помощью силовых гироскопов и расположенных под углами к осям связанного базиса РД, включающем определение требуемого значения скорости коррекции орбиты КА, определение интервала времени (t0, tk) для проведения одноимпульсной коррекции орбиты, поддержание заданной ориентации КА с помощью силовых гироскопов в процессе коррекции орбиты реактивными двигателями, измерение при этом значений вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, определение n групп РД, состоящих из тех реактивных двигателей, векторы тяг которых обеспечивают заданное направление коррекции орбиты, прогноз изменения суммарного вектора кинетического момента КА  на определенном интервале времени коррекции орбиты для каждой из n групп, где
на определенном интервале времени коррекции орбиты для каждой из n групп, где  - начальное значение суммарного вектора кинетического момента КА, определенное по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости КА,
- начальное значение суммарного вектора кинетического момента КА, определенное по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости КА,  - изменения кинетического момента КА на определенном интервале коррекции при использовании n-й группы РД с учетом влияния на КА внешних возмущающих моментов и моментов от сил каждого i-го реактивного двигателя, входящего в n-ю группу, определение по выполнению условия
- изменения кинетического момента КА на определенном интервале коррекции при использовании n-й группы РД с учетом влияния на КА внешних возмущающих моментов и моментов от сил каждого i-го реактивного двигателя, входящего в n-ю группу, определение по выполнению условия  момента времени tSn выхода вектора суммарного кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений, определение для каждой из n-х групп интервала времени Δtn=tSn-t0 выхода суммарного вектора кинетического момента на границу указанной области S, определение величины импульсов коррекции
момента времени tSn выхода вектора суммарного кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений, определение для каждой из n-х групп интервала времени Δtn=tSn-t0 выхода суммарного вектора кинетического момента на границу указанной области S, определение величины импульсов коррекции  для каждой из n-х групп двигателей, где
для каждой из n-х групп двигателей, где  - суммарное значение проекций тяг i-х реактивных двигателей n-й группы на направление коррекции орбиты, выбор для коррекции орбиты из условия максимизации импульса
- суммарное значение проекций тяг i-х реактивных двигателей n-й группы на направление коррекции орбиты, выбор для коррекции орбиты из условия максимизации импульса  n'-й группы реактивных двигателей, включение в момент времени t0 выбранной группы реактивных двигателей, сравнение в процессе коррекции орбиты значения суммарного кинетического момента
n'-й группы реактивных двигателей, включение в момент времени t0 выбранной группы реактивных двигателей, сравнение в процессе коррекции орбиты значения суммарного кинетического момента  для указанной n'-й группы реактивных двигателей с текущими значениями вектора
для указанной n'-й группы реактивных двигателей с текущими значениями вектора  и продолжение коррекции орбиты в случае выполнения условия
и продолжение коррекции орбиты в случае выполнения условия  , где
, где  - суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, а в противном случае прекращение коррекции орбиты, дополнительно по баллистической программе полета определяют интервал полетного времени КА для выполнения многоимпульсной коррекции орбиты (τ0, τk) и значение скорости коррекции
- суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, а в противном случае прекращение коррекции орбиты, дополнительно по баллистической программе полета определяют интервал полетного времени КА для выполнения многоимпульсной коррекции орбиты (τ0, τk) и значение скорости коррекции  , определяют максимальное число L z-x временных интервалов коррекции ((τ0z, τkz)∈(τ0, τk), z=1,2,...,L) и время середины каждого из z-x интервалов
, определяют максимальное число L z-x временных интервалов коррекции ((τ0z, τkz)∈(τ0, τk), z=1,2,...,L) и время середины каждого из z-x интервалов  , из условия
, из условия  , где
, где  , М - масса космического аппарата, с учетом возможных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени
, М - масса космического аппарата, с учетом возможных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени  для начала коррекции орбиты на первом интервале исходя из условия
для начала коррекции орбиты на первом интервале исходя из условия  определяют длительность Δtz каждого из z-x интервалов при условии выполнения коррекций на каждом из них, определяют момент времени
определяют длительность Δtz каждого из z-x интервалов при условии выполнения коррекций на каждом из них, определяют момент времени  , соответствующий последнему из возможных моментов времени для начала коррекции орбиты на первом интервале, по измеренным на момент времени τ0 значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата определяют
, соответствующий последнему из возможных моментов времени для начала коррекции орбиты на первом интервале, по измеренным на момент времени τ0 значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата определяют  и с учетом влияния на космический аппарат внешних возмущающих моментов прогнозируют изменения кинетического момента космического аппарата от момента времени τ0 до
и с учетом влияния на космический аппарат внешних возмущающих моментов прогнозируют изменения кинетического момента космического аппарата от момента времени τ0 до  , на интервале
, на интервале  , определяют моменты времени
, определяют моменты времени  ,
,  ,
,  , соответствующие минимальным, и моменты времени
, соответствующие минимальным, и моменты времени  ,
,  ,
,  , соответствующие максимальным значениям компонентов вектора суммарного кинетического момента
, соответствующие максимальным значениям компонентов вектора суммарного кинетического момента  , j=min,max; q=x,y,z}, с учетом которых задают возможные интервалы коррекции орбиты
, j=min,max; q=x,y,z}, с учетом которых задают возможные интервалы коррекции орбиты  , на каждом возможном интервале коррекции прогнозируют вышеуказанным образом изменение вектора суммарного кинетического момента КА при работе n-х групп РД и определяют величины импульсов коррекции для каждой из указанных групп РД в интервалах времени
, на каждом возможном интервале коррекции прогнозируют вышеуказанным образом изменение вектора суммарного кинетического момента КА при работе n-х групп РД и определяют величины импульсов коррекции для каждой из указанных групп РД в интервалах времени  , выбор для проведения коррекции орбиты на первом интервале n'-й группы РД производят из условия максимизации определенных величин импульсов коррекции
, выбор для проведения коррекции орбиты на первом интервале n'-й группы РД производят из условия максимизации определенных величин импульсов коррекции  и выбирают для проведения коррекции интервал времени, на котором указанная n'-я группа РД имеет максимальный импульс, выполняют коррекцию орбиты n'-й группой РД на выбранном интервале, по результатам коррекции орбиты на первом интервале определяют часть скорости коррекции
и выбирают для проведения коррекции интервал времени, на котором указанная n'-я группа РД имеет максимальный импульс, выполняют коррекцию орбиты n'-й группой РД на выбранном интервале, по результатам коррекции орбиты на первом интервале определяют часть скорости коррекции  , отработанную с учетом ограничений по
, отработанную с учетом ограничений по  , из условия
, из условия  с учетом указанных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени
с учетом указанных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени  для начала коррекции орбиты на втором интервале (z=2) исходя из условия
для начала коррекции орбиты на втором интервале (z=2) исходя из условия  , определяют длительность ΔtL-1 каждого из оставшихся интервалов, при условии выполнения коррекции орбиты на всех оставшихся интервалах определяют момент времени
, определяют длительность ΔtL-1 каждого из оставшихся интервалов, при условии выполнения коррекции орбиты на всех оставшихся интервалах определяют момент времени  , соответствующий последнему из возможных моментов времени для начала коррекции орбиты на втором интервале, по измеренным на момент времени конца предыдущего интервала tk1 значениям кинетического момента силовых гироскопов и угловой скорости КА определяют
, соответствующий последнему из возможных моментов времени для начала коррекции орбиты на втором интервале, по измеренным на момент времени конца предыдущего интервала tk1 значениям кинетического момента силовых гироскопов и угловой скорости КА определяют  и с учетом влияния на КА внешних возмущающих моментов прогнозируют изменения суммарного вектора кинетического момента КА от момента времени tk1 до
и с учетом влияния на КА внешних возмущающих моментов прогнозируют изменения суммарного вектора кинетического момента КА от момента времени tk1 до  , на интервале
, на интервале  определяют максимальные значения компонентов вектора суммарного кинетического момента, соответствующие моментам времени
определяют максимальные значения компонентов вектора суммарного кинетического момента, соответствующие моментам времени  , с учетом которых задают возможные интервалы коррекции орбиты
, с учетом которых задают возможные интервалы коррекции орбиты  , и вышеуказанным образом по условию максимизации определенных величин импульсов выбирают для коррекции орбиты n''-ю группу реактивных двигателей и интервал времени, на котором указанная n''-я группа имеет максимальный импульс, выполняют коррекцию орбиты n''-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на втором интервале определяют часть скорости коррекции
, и вышеуказанным образом по условию максимизации определенных величин импульсов выбирают для коррекции орбиты n''-ю группу реактивных двигателей и интервал времени, на котором указанная n''-я группа имеет максимальный импульс, выполняют коррекцию орбиты n''-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на втором интервале определяют часть скорости коррекции  отработанную с учетом ограничений по
отработанную с учетом ограничений по  , далее повторяют вышеуказанным образом определение интервалов для проведения очередных коррекций орбиты на z-x интервалах, при этом моменты времени
, далее повторяют вышеуказанным образом определение интервалов для проведения очередных коррекций орбиты на z-x интервалах, при этом моменты времени  определяют из условия
определяют из условия  , где а=1,2,3... - число интервалов, на которых проводилась коррекция орбиты космического аппарата, а длительность интервалов ΔtL-z+1 определяют из условия
, где а=1,2,3... - число интервалов, на которых проводилась коррекция орбиты космического аппарата, а длительность интервалов ΔtL-z+1 определяют из условия  , далее соответственно определяют
, далее соответственно определяют  , а прогноз изменений суммарного вектора кинетического момента космического аппарата осуществляют начиная с tk(z-1) и заканчивая
, а прогноз изменений суммарного вектора кинетического момента космического аппарата осуществляют начиная с tk(z-1) и заканчивая  , на выбранных n''...-х группах реактивных двигателей продолжают коррекцию орбиты на z-x интервалах до получения заданной величины скорости коррекции
, на выбранных n''...-х группах реактивных двигателей продолжают коррекцию орбиты на z-x интервалах до получения заданной величины скорости коррекции  .
.
Предлагаемый способ управления КА позволяет увеличить импульс коррекции от РД, одновременно обеспечив поддержание ориентации КА с требуемой точностью, не допустив при этом насыщения системы силовых гироскопов.
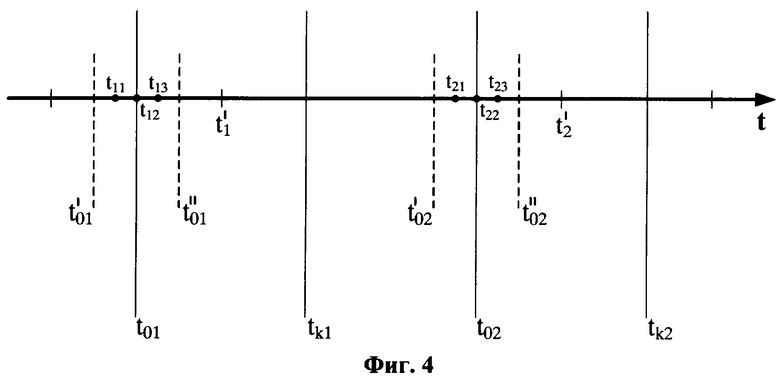
Для пояснения сущности предлагаемого способа приводятся фиг.1-4. На фиг.1 изображена схема размещения блоков РД КА. Фиг.2 иллюстрирует маневр перевода средней точки ожидаемого смещения в начало координат. На фиг.3 изображен график изменения компонентов вектора кинетического момента КА (Gx, Gy, Gz,) во времени t Фиг.4 иллюстрирует пример выбора интервалов времени проведения коррекции предлагаемым способом.
В качестве примера, иллюстрирующего предлагаемый способ управления КА, рассматривают управление геостационарным спутником связи (ГСС), снабженным восемью электрореактивными двигателями (фиг.1), во время коррекции его орбиты. На фиг.1 изображен корпус ГСС, блоки двигателей ориентации 1-8 и жестко связанная с КА система координат OXYZ (ССК). Управление ориентацией КА осуществляется силовыми гироскопами. При удержании КА на геостационарной орбите (ГСО) решается задача удержания его в рабочей точке с заданной точностью по долготе и широте с использованием восьми электрореактивных двигателей. С их помощью осуществляют коррекцию орбиты КА и одновременно управление кинетическим моментом аппарата.
Коррекцию наклонения обеспечивают с помощью работы на одном или двух интервалах маневрирования на витке. Середины этих интервалов должны быть расположены на линии узлов целевой и исходной плоскостей орбит, см. [2], [3], [4].
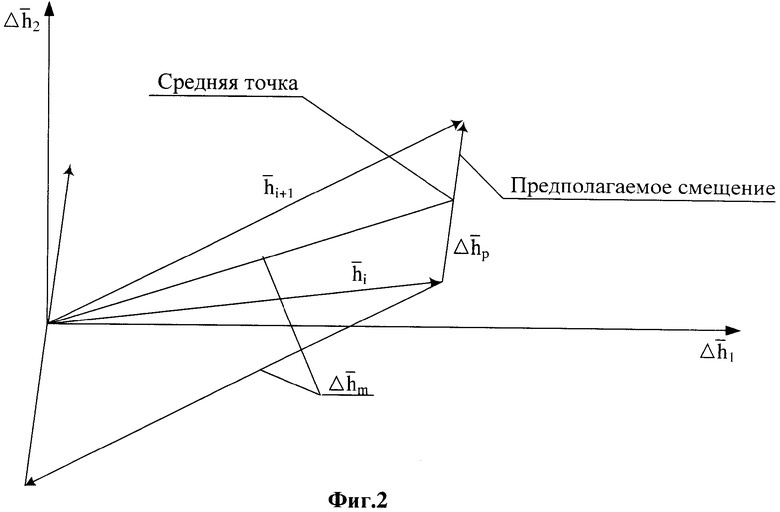
Фиг.2 иллюстрирует маневр перевода средней точки ожидаемого смещения в начало координат. На ней введены следующие обозначения:  , - маневр, который переводит среднюю точку ожидаемого смещения в начало координат,
, - маневр, который переводит среднюю точку ожидаемого смещения в начало координат,  - пассивное изменение вектора наклонения
- пассивное изменение вектора наклонения  от момента между i-й и i+1-й коррекциями.
от момента между i-й и i+1-й коррекциями.
Принято, что при коррекции наклонения ликвидируется только составляющая, параллельная направлению векового ухода. В этом случае вектор наклонения циклически изменяется с полугодовым периодом и амплитудой ≈0,025°. С целью минимизации наибольшего изменения вектора наклонения выбирается такой маневр  , который переводит среднюю точку ожидаемого смещения в начало координат [см. фиг.2]
, который переводит среднюю точку ожидаемого смещения в начало координат [см. фиг.2]  , где
, где  - пассивное изменение вектора
- пассивное изменение вектора  от момента между i-й и i+1-й коррекциями. Величина необходимого импульса определяется по формуле
от момента между i-й и i+1-й коррекциями. Величина необходимого импульса определяется по формуле  , где νkp - скорость спутника на ГСО.
, где νkp - скорость спутника на ГСО.
При коррекции истинного вектора наклонения оптимальный интервал между коррекциями 3-5 суток при коррекции векового смещения - 1-3 суток. Увеличение интервала коррекции нежелательно, т.к. это приведет к существенному увеличению баллистических потерь вследствие большой длительности активных участков.
Коррекция эксцентриситета и периода обращения обеспечивается трансверсальными импульсами. Середины интервалов коррекции должны быть расположены на линии апсид.
Рабочий интервал долгот Δλ определяется из условия  , где Δλзад=0,1° - заданный интервал удержания КА по долготе; δеmax - максимальная амплитуда колебаний эксцентриситета относительно среднего значения (≈10-4);
, где Δλзад=0,1° - заданный интервал удержания КА по долготе; δеmax - максимальная амплитуда колебаний эксцентриситета относительно среднего значения (≈10-4);  - амплитуда полугодовых колебаний средней долготы, вызванная притяжением Солнца; Δλпр - ошибка прогноза в прицельной точке; emax - предельно допустимое значение эксцентриситета (≈2·10-4).
- амплитуда полугодовых колебаний средней долготы, вызванная притяжением Солнца; Δλпр - ошибка прогноза в прицельной точке; emax - предельно допустимое значение эксцентриситета (≈2·10-4).
Параметры одноимпульсной коррекции сидерического периода обращения определяются из условия исправления λ и уменьшения эксцентриситета на витке, где Δλ выходит за заданные границы. Угловая длительность активного участка определяется по формуле  , где ωe=0,7292·10-4 рад/сек - угловая скорость земли; Wn - среднее трансверсальное ускорение; tTp - момент начала коррекции.
, где ωe=0,7292·10-4 рад/сек - угловая скорость земли; Wn - среднее трансверсальное ускорение; tTp - момент начала коррекции.
Величина необходимого импульса скорости определяется по формуле  .
.
Курс тяги определяется из условия:
ψ=0, при ξ>0
 .
.
Для удержания эксцентриситета в принятых границах проводится двухимпульсная коррекция, параметры которой следующие: 
При планировании коррекции наклонения орбиты необходимо разнести ее по времени с коррекцией эксцентриситета. Для уменьшения баллистических потерь коррекцию в рабочей точке необходимо проводить с минимальной периодичностью (1-2 дня).
Можно обозначить через I=1, 2, 3 номера осей связанного базиса. Пусть проекции векторов управляющих сил (Рi) и моментов (Мi) на эти оси от каждого блока двигателей имеют вид:
- для блока 1 - (0, Р2, Р3), (-M1, -M2, М3);
- для блока 2 - (0, P2, Р3), (-M1, M2, -М3);
- для блока 3 - (0, -Р2, Р3), (M1, -M2, -М3);
- для блока 4 - (0, -Р2, Р3), (M1, M2, М3);
- для блока 5 - (0, -Р2, -Р3), (-M1, M2, -М3);
- для блока 6 - (0, -Р2, -Р3), (-M1, -M2, М3);
- для блока 7 - (0, P2, -Р3), (M1, M2, М3);
- для блока 8 - (0, Р2, -Р3), (M1, -M2, -М3).
Предполагается, что коррекцию орбиты необходимо проводить в направлении оси -OY связанного базиса (ССК). Для этой цели можно использовать блоки двигателей 3, 4, 5, 6 (см. фиг.1), создающие тягу в заданном направлении. Оптимальный вариант - использовать все перечисленные ранее блоки двигателей, создающих тягу в заданном направлении. В этом случае создается максимальная тяга по оси -OY, а возмущения от работы этих двигателей, вызванные смещением векторов тяг относительно центра масс КА, взаимно компенсируются. В случае когда использование всех перечисленных двигателей невозможно, можно использовать, например, блоки РД 3, 4, 5, или 4, 5, 6, или 3, 5, 6. Но в этом случае возникнут нескомпенсированные возмущающие моменты по всем осям. Более предпочтительно использовать в таком случае пару блоков РД. Анализируя представленные проекции векторов тяг и моментов на оси связанного базиса, можно сделать вывод, что для коррекции орбиты по соответствующим направлениям 2-й и 3-й осей ССК достаточно использовать, например, пару блоков РД, которая создает тягу в требуемом направлении и взаимно компенсирует тягу в другом направлении. В случае указанного выше размещения блоков РД это следующие пары блоков РД:
1) для коррекции в направлении оси OY: 1-й и 8-й; 2-й и 7-й;
2) для коррекции в направлении оси - OY: 3-й и 6-й; 4-й и 5-й;
3) для коррекции в направлении оси OZ: 1-й и 4-й; 2-й и 3-й;
4) для коррекции в направлении оси - OZ: 5-й и 8-й; 6-й и 7-й.
Необходимо отметить, что при таком выборе блоков РД в каждом из перечисленных ранее случаев возникает нескомпенсированный момент, наличие которого приводит к накоплению кинетического момента системой СГ. поддерживающей требуемую ориентацию КА. Так, например, при коррекции орбиты в направлении оси -OY с использованием 3-го и 6-го блоков РД сила от их работы будет равна  , моменты от работы этих блоков РД по осям ОХ и OZ взаимно компенсируются, а момент по оси OY равен
, моменты от работы этих блоков РД по осям ОХ и OZ взаимно компенсируются, а момент по оси OY равен  .
.
Возникает задача компенсации этого момента, т.к. его наличие может привести к насыщению СГ и, как следствие, необходимости включения других блоков РД для разгрузки накопленного кинетического момента. Сделать это можно следующим образом. Планируя проведение коррекции, можно смоделировать на заданном временном интервале суммарный момент, воздействующий на КА, и, учитывая динамику его изменения, выбирать ту пару блоков РД, которая будет создавать момент по соответствующей оси ССК, имеющий противоположное направление по сравнению с моментом от пары блоков РД, создающих момент относительно оси OY, и соответственно частично компенсировать его. Частично потому, что момент от работающих блоков РД будет значительно больше, чем момент от внешних сил, действующих на КА (гравитационный, аэродинамический, силы светового давления, магнитный и т.д.). Тем не менее, скорость накопления кинетического момента СГ будет ниже, и это позволит при двухимпульсной коррекции через полвитка, например, выбрав блоки РД, создающие возмущающий момент в противоположном направлении, изменить направление накопления кинетического момента СГ на противоположное. В рассматриваемом примере это блоки РД 4 и 5, создающие ту же тягу по оси OY, что и предыдущая пара блоков  , но момент от работы этих блоков РД по оси OY будет равен
, но момент от работы этих блоков РД по оси OY будет равен  .
.
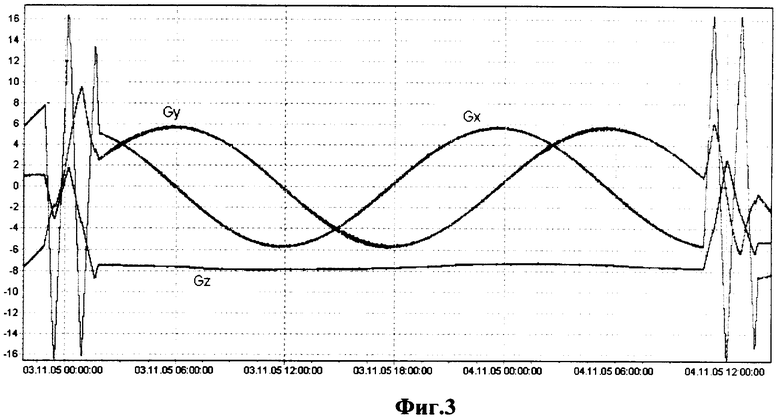
На фиг.3 представлен график накопления кинетического момента в процессе полета геостационарного спутника связи, полученный в результате интегрирования следующих уравнений движения ГСС.


 ;
;

 ;
;
 ;
;
 ;
;

здесь  - суммарный кинетический момент КА;
- суммарный кинетический момент КА;
 - кинетический момент системы СГ;
- кинетический момент системы СГ;
 - угловая скорость КА;
- угловая скорость КА;
 ,
,  ,
,  - соответственно гравитационные моменты. вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;
- соответственно гравитационные моменты. вызванные влиянием на ССС гравитационных полей Земли, Луны и Солнца;
 - магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;
- магнитный момент, обусловленный взаимодействием магнитного поля Земли и собственного магнитного момента КА;
 ,
,  ,
,  - орбиты векторов Земля - КА, Солнце - КА, Луна -спутник;
- орбиты векторов Земля - КА, Солнце - КА, Луна -спутник;
 - тензор инерции КА;
- тензор инерции КА;
μE=3,986032·105 км3/сек2;
μS=1,32715445·1011 км3/сек2;
μM=4,90264·105 км3/сек2 - гравитационные параметры Земли-Луны и Солнца;
RE, RS, RM - радиус-векторы Земли, Луны и Солнца;
 - момент от силы светового давления
- момент от силы светового давления  , которая возникает при попадании потока солнечного света на спутник и при его отражении;
, которая возникает при попадании потока солнечного света на спутник и при его отражении;
S - площадь поперечного сечения КА;
E0 - мощность потока солнечного излучения;
с - скорость света;
r* - средний радиус орбиты Земли;
Δ - расстояние от КА до Солнца;
к - коэффициент отражения света поверхностью КА;
 - собственный магнитный момент КА;
- собственный магнитный момент КА;
 - магнитное поле Земли;
- магнитное поле Земли;
 - радиус вектор РД;
- радиус вектор РД;
 - тяга РД.
- тяга РД.
Нетрудно сделать вывод, что, находясь на нисходящей ветви графика кинетического момента КА, для уменьшения влияния по этой оси возмущающего момента от тяг РД в процессе коррекции орбиты необходимо использовать для коррекции в направлении оси - OY ту пару блоков РД, которая приводит к возникновению момента по OY, т.е. пару блоков РД 4 и 5, а находясь на восходящей ветви графика, соответственно - пару 3 и 6. Возмущающий момент от блоков РД существенно больше, чем возмущающий момент от внешних сил, поэтому необходимо учесть начальное значение кинетического момента КА, т.к. от его величины зависит продолжительность работы РД до накопления предельного кинетического момента в системе СГ и, как следствие, к необходимости ее разгрузки.
Для иллюстрации реализации предлагаемого способа коррекции орбиты предполагается, что на основании заданного баллистического плана полета требуется за период (τ0, τk) с 02.11.05 22:00:00 по 06.11.05 12:00:00 набрать в направлении оси OZ ССК скорость коррекции орбиты, равную ΔV=0.40840 м/с. Пусть маневры можно проводить только в восходящих узлах орбиты. Тогда максимально возможное число интервалов для маневрирования L=3 с номерами z=1,2,3. На выбранном полетном интервале средние точки для маневрирования, соответствующие восходящим узлам орбиты, по времени будут следующими:  ,
,  ,
,  , см. (фиг.4). Вводимые обозначения на фиг.4 соответствуют дальнейшему описанию способа управления КА.
, см. (фиг.4). Вводимые обозначения на фиг.4 соответствуют дальнейшему описанию способа управления КА.
Пусть масса КА составляет М=1100 кг, тяга РД в направлении коррекции составляет Р=0.02083 Н. В рассматриваемом случае для коррекции орбиты будет использоваться четверка из следующих блоков РД - 1-й и 4-й; 2-й и 3-й, см. (фиг.1). Используя условие  , где
, где  , определим, что для выработки скорости коррекции на первом интервале (z=1) требуется 21567 с.
, определим, что для выработки скорости коррекции на первом интервале (z=1) требуется 21567 с.
Таким образом, учитывая, что для уменьшения баллистических потерь интервал должен быть симметричен относительно средней точки, начало коррекции на первом интервале должно соответствовать  . Но по условию «прицельной расчетной точки» проведения коррекции начало первого интервала не должно быть ранее 22:00:00 02.11.05. Кроме указанного ограничения на начало интервала коррекции (и, следовательно, на его продолжительность) могут существовать и другие ограничения, например, по продолжительности работы РД.
. Но по условию «прицельной расчетной точки» проведения коррекции начало первого интервала не должно быть ранее 22:00:00 02.11.05. Кроме указанного ограничения на начало интервала коррекции (и, следовательно, на его продолжительность) могут существовать и другие ограничения, например, по продолжительности работы РД.
Из условия  определяется то, что в рассматриваемом случае длительность каждого из интервалов при условии равномерной отработки скорости коррекции должна составлять Δtz=7189 с. Следовательно, момент времени
определяется то, что в рассматриваемом случае длительность каждого из интервалов при условии равномерной отработки скорости коррекции должна составлять Δtz=7189 с. Следовательно, момент времени  будет в 23:19:00 (02.11.05).
будет в 23:19:00 (02.11.05).
Измеряется на момент времени τ0=22:00:00 (02.11.05) кинетический момент силовых гироскопов и угловая скорость КА. С этого момента времени и до момента времени  , используя выражения (12), можно прогнозировать изменение кинетического момента КА. На интервале
, используя выражения (12), можно прогнозировать изменение кинетического момента КА. На интервале  определяются моменты времени, соответствующие максимальным и минимальным значениям суммарного вектора кинетического момента:
определяются моменты времени, соответствующие максимальным и минимальным значениям суммарного вектора кинетического момента:  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , j=min,max; q=x,y,z}.
, j=min,max; q=x,y,z}.
Используя в качестве начальных значений кинетического момента и угловой скорости КА значения, рассчитанные на указанные моменты времени, можно спрогнозировать изменение кинетического момента на интервалах  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  . На фиг.4 для указанных моментов времени введены обозначения t11, t12, t13,.... Далее из условия максимизации импульсов
. На фиг.4 для указанных моментов времени введены обозначения t11, t12, t13,.... Далее из условия максимизации импульсов  определяется n'-я группа РД, которая будет использоваться при маневрировании на первом интервале, где
определяется n'-я группа РД, которая будет использоваться при маневрировании на первом интервале, где  . В рассматриваемом случае максимальный импульс коррекции достигается при использовании группы РД, состоящей из 1, 2, 3, 4 РД, начиная с момента времени t01=22:52:11 (02.11.05). Коррекция орбиты проводится на первом интервале (с 02.11.05 22:52:11 до 03.11.05 01:48:11) с использованием выбранной группы РД. При этом учитываются ограничения по
. В рассматриваемом случае максимальный импульс коррекции достигается при использовании группы РД, состоящей из 1, 2, 3, 4 РД, начиная с момента времени t01=22:52:11 (02.11.05). Коррекция орбиты проводится на первом интервале (с 02.11.05 22:52:11 до 03.11.05 01:48:11) с использованием выбранной группы РД. При этом учитываются ограничения по  .
.
По результатам коррекции на первом интервале была отработана, например, скорость коррекции, соответствующая  (работа двигателей по указанному ограничению не прерывалась).
(работа двигателей по указанному ограничению не прерывалась).
Таким образом, на последующих интервалах требуется отработать оставшееся значение скорости коррекции 0.204240 м/с.
Из условия  с учетом указанных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени
с учетом указанных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени  для начала коррекции орбиты на втором интервале (z=2). Исходя из условия
для начала коррекции орбиты на втором интервале (z=2). Исходя из условия  , определяют длительность ΔtL-1 каждого из оставшихся интервалов при условии выполнения коррекции орбиты на всех оставшихся интервалах. Определяют момент времени
, определяют длительность ΔtL-1 каждого из оставшихся интервалов при условии выполнения коррекции орбиты на всех оставшихся интервалах. Определяют момент времени  , соответствующий последнему из возможных моментов времени для начала коррекции орбиты на втором интервале. По измеренным на момент времени конца предыдущего интервала tk1 значениям кинетического момента силовых гироскопов и угловой скорости КА определяют
, соответствующий последнему из возможных моментов времени для начала коррекции орбиты на втором интервале. По измеренным на момент времени конца предыдущего интервала tk1 значениям кинетического момента силовых гироскопов и угловой скорости КА определяют  и, учитывая влияние на КА внешних возмущающих моментов, прогнозируют изменения суммарного вектора кинетического момента КА от момента времени tk1 до
и, учитывая влияние на КА внешних возмущающих моментов, прогнозируют изменения суммарного вектора кинетического момента КА от момента времени tk1 до  .
.
На интервале  определяют максимальные значения компонентов вектора суммарного кинетического момента, соответствующие моментам времени
определяют максимальные значения компонентов вектора суммарного кинетического момента, соответствующие моментам времени  , j=min,max; q=x,y,z, с учетом которых задают возможные интервалы коррекции орбиты
, j=min,max; q=x,y,z, с учетом которых задают возможные интервалы коррекции орбиты  . Далее вышеуказанным образом по условию максимизации определенных величин импульсов
. Далее вышеуказанным образом по условию максимизации определенных величин импульсов  , где
, где  выбирают для коррекции орбиты n''-ю группу реактивных двигателей и интервал времени, на котором указанная n''-я группа имеет максимальный импульс. Выполняют коррекцию орбиты n''-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на втором интервале определяют часть скорости коррекции
выбирают для коррекции орбиты n''-ю группу реактивных двигателей и интервал времени, на котором указанная n''-я группа имеет максимальный импульс. Выполняют коррекцию орбиты n''-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на втором интервале определяют часть скорости коррекции  , отработанную с учетом ограничений по
, отработанную с учетом ограничений по  .
.
В рассматриваемом примере для выработки оставшейся скорости коррекции на втором интервале используется та же группа РД. Однако приведенный пример может быть рассмотрен как частный случай. В общем случае отработки значений скорости коррекции, больших по величине, чем в рассмотренном примере, указанные группы РД могут быть разными.
В рассматриваемом примере момент времени  будет соответствовать на 04.11.05 10:46:11. При условии выработки оставшейся скорости коррекции на двух оставшихся интервалах момент времени
будет соответствовать на 04.11.05 10:46:11. При условии выработки оставшейся скорости коррекции на двух оставшихся интервалах момент времени  . Прогнозируя изменение кинетического момента с момента завершения первого интервала до моментов времени, соответствующих интервалу
. Прогнозируя изменение кинетического момента с момента завершения первого интервала до моментов времени, соответствующих интервалу  , по аналогии с первым интервалом можно определить, что для выработки максимального корректирующего импульса и полной отработки скорости коррекции достаточно выполнить маневр выбранной группой РД на втором интервале с 10:46:11 (04.11.05) по 13:42:23 (04.11.05). Выполняется маневр выбранной группой РД на определенном втором интервале. Прогноз изменения кинетического момента на указанных интервалах представлен на фиг.3, где приведены компоненты вектора суммарного кинетического момента KA Gx,Gy,Gz, в H·м·c.
, по аналогии с первым интервалом можно определить, что для выработки максимального корректирующего импульса и полной отработки скорости коррекции достаточно выполнить маневр выбранной группой РД на втором интервале с 10:46:11 (04.11.05) по 13:42:23 (04.11.05). Выполняется маневр выбранной группой РД на определенном втором интервале. Прогноз изменения кинетического момента на указанных интервалах представлен на фиг.3, где приведены компоненты вектора суммарного кинетического момента KA Gx,Gy,Gz, в H·м·c.
В случае необходимости дальнейшего проведения коррекции орбиты КА на более продолжительных его интервалах полета и наличия для этого очередных z-x интервалов, моменты времени  для них определяют из условия
для них определяют из условия  , где a=1,2,3...- число интервалов, на которых проводилась коррекция орбиты космического аппарата. А длительность интервалов ΔtL-z+1 определяют из условия
, где a=1,2,3...- число интервалов, на которых проводилась коррекция орбиты космического аппарата. А длительность интервалов ΔtL-z+1 определяют из условия  , далее соответственно определяют
, далее соответственно определяют  , а прогноз изменений суммарного вектора кинетического момента космического аппарата осуществляют, начиная с tk(z-1) и заканчивая
, а прогноз изменений суммарного вектора кинетического момента космического аппарата осуществляют, начиная с tk(z-1) и заканчивая  . На выбранных n''...-x группах РД продолжают коррекцию орбиты на z-x интервалах до получения заданной величины скорости коррекции
. На выбранных n''...-x группах РД продолжают коррекцию орбиты на z-x интервалах до получения заданной величины скорости коррекции  .
.
В рассмотренном примере требуемый для коррекции орбиты импульс удается отработать на двух интервалах вместо трех запланированных в баллистическом плане полета, что позволяет уменьшить расход ресурса РД по числу включений.
Реализацию предлагаемого способа управления КА можно осуществить с использованием системы управления движением и навигации (СУДЫ) ГСС «Ямал», см.[6]. Указанная СУДН построена на принципах бескарданной инерциальной навигационной системы (БИНС) [7], основой которой являются бортовая ЦВМ, необходимый состав инерционных датчиков и датчиков внешней информации. Основу составляют также исполнительные реактивные органы систем ориентации и управления движением центром масс КА. Набор указанной бортовой аппаратуры позволяет в полном объеме выполнить все действия предлагаемого способа управления КА.
При рассмотренном подходе к проведению коррекции орбиты решается в полном объеме баллистическая задача, но условия (временные интервалы маневрирования) для ее решения определяются с учетом значений кинетического момента космического аппарата к моменту начала каждого интервала и с учетом изменения указанного кинетического момента при маневрировании.
За счет выбора наиболее подходящих начальных условий по кинетическому моменту  на момент времени начала маневра, удается увеличить импульс работающих РД на каждом интервале коррекции и, таким образом, уменьшить число включений РД в целом.
на момент времени начала маневра, удается увеличить импульс работающих РД на каждом интервале коррекции и, таким образом, уменьшить число включений РД в целом.
Анализ программы полета ГСС «Ямал-200» показал экономию ресурса РД (электрореактивных двигателей) по числу включений на маневрах на ˜6-8% от номинального случая выполнения программы полета без применения указанного способа.
Список литературы.
1. Способ управления космическим аппаратом, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг, система для реализации способа, блок реактивных двигателей системы. Патент RU 2124461 С1.
2. Способ управления космическим аппаратом с помощью силовых гироскопов и реактивных двигателей, расположенных под углом к осям связанного базиса. Патент RU 2197412 С2.
3. Способ управления космическим аппаратом с помощью реактивных исполнительных органов и система для его реализации. Патент RU 2112716 С1.
4. А.В.Соколов, Ю.П.Улыбышев. Многовитковые маневры с малой тягой в окрестности геостационарной орбиты. Известия Академии наук. Теория и системы управления. 1999 г., №2, стр.95-100.
5. Г.М.Чернявский, ВАБартенев, В.А.Малышев. Управление орбитой стационарного спутника. Машиностроение 1984 г.
6. Система управления движением и навигации ГСС «Ямал». Техническое описание. РКК «Энергия» им. С.П.Королева. г.Королев. 1999 г.
7. Б.В.Раушенбах, Е.Н.Токарь. Управление ориентацией космических аппаратов. М.: Наука, 1974 г.
Изобретение относится к управлению ориентацией и движением центра масс космических аппаратов (КА). Предлагаемый способ включает выбор для коррекции орбиты КА определенных групп реактивных двигателей (РД) и интервалов их включения. Действие РД согласуют с работой силовых гироскопов, поддерживающих заданную ориентацию КА в процессе коррекции орбиты. Указанный выбор осуществляют по текущим и прогнозируемым значениям суммарного вектора кинетического момента КА с учетом внешних возмущающих моментов и моментов от тяг РД. При этом максимизируют прогнозируемый импульс включаемой группы РД, продолжая коррекцию ею до тех пор, пока расхождение между указанными прогнозируемым и текущим значениями будет оставаться допустимым. Максимизацию производят на множестве располагаемых РД и на множестве возможных интервалов включения тех или иных групп РД. Техническим результатом изобретения является повышение эффективности коррекции орбиты КА располагаемым набором РД. 4 ил.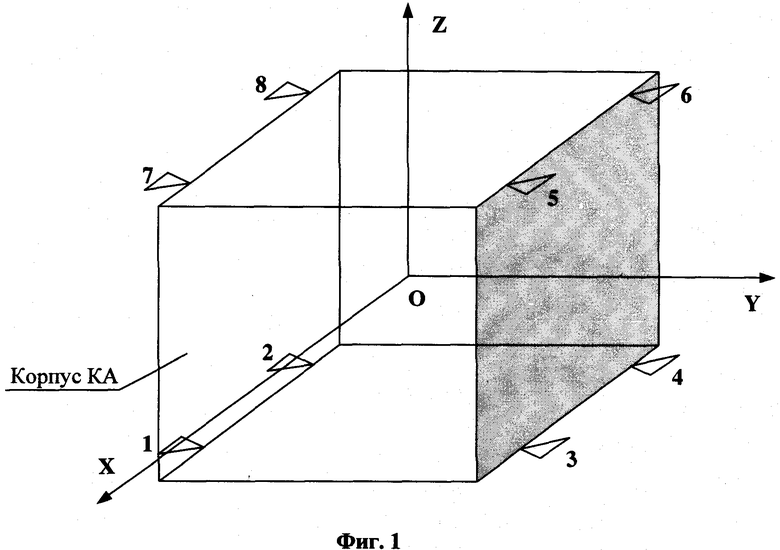
Способ управления космическим аппаратом с помощью силовых гироскопов и расположенных под углами к осям связанного базиса реактивных двигателей, включающий определение требуемого значения скорости коррекции орбиты космического аппарата, определение интервала времени (t0, tk) для проведения одноимпульсной коррекции орбиты, поддержание заданной ориентации космического аппарата с помощью силовых гироскопов в процессе коррекции орбиты реактивными двигателями, измерение при этом значений вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, определение n групп реактивных двигателей, состоящих из тех реактивных двигателей, векторы тяг которых обеспечивают заданное направление коррекции орбиты, прогноз изменения суммарного вектора кинетического момента космического аппарата  на определенном интервале времени коррекции орбиты для каждой из указанных n групп, где
на определенном интервале времени коррекции орбиты для каждой из указанных n групп, где  - начальное значение суммарного вектора кинетического момента космического аппарата, определенное по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата,
- начальное значение суммарного вектора кинетического момента космического аппарата, определенное по упомянутым значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата,  - изменение кинетического момента космического аппарата на определенном интервале коррекции при использовании n-й группы реактивных двигателей с учетом влияния на космический аппарат внешних возмущающих моментов и моментов от тяг каждого i-го реактивного двигателя, входящего в n-ю группу, определение по выполнению условия
- изменение кинетического момента космического аппарата на определенном интервале коррекции при использовании n-й группы реактивных двигателей с учетом влияния на космический аппарат внешних возмущающих моментов и моментов от тяг каждого i-го реактивного двигателя, входящего в n-ю группу, определение по выполнению условия  момента времени tSn выхода вектора суммарного кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений, определение для каждой из n-х групп интервала времени Δtn=tSn-t0 выхода суммарного вектора кинетического момента на границу указанной области S, определение величины импульсов коррекции
момента времени tSn выхода вектора суммарного кинетического момента для каждой из n-х групп на границу области S его допустимых для проведения коррекции орбиты значений, определение для каждой из n-х групп интервала времени Δtn=tSn-t0 выхода суммарного вектора кинетического момента на границу указанной области S, определение величины импульсов коррекции  для каждой из n-х групп двигателей, где
для каждой из n-х групп двигателей, где  - суммарное значение проекций тяг i-x реактивных двигателей n-й группы на направление коррекции орбиты, выбор для коррекции орбиты n'-й группы реактивных двигателей из условия максимизации импульса , включение в момент времени t0 выбранной группы реактивных двигателей, сравнение в процессе коррекции орбиты значения суммарного вектора кинетического момента
- суммарное значение проекций тяг i-x реактивных двигателей n-й группы на направление коррекции орбиты, выбор для коррекции орбиты n'-й группы реактивных двигателей из условия максимизации импульса , включение в момент времени t0 выбранной группы реактивных двигателей, сравнение в процессе коррекции орбиты значения суммарного вектора кинетического момента  космического аппарата для указанной n'-й группы реактивных двигателей с текущими значениями этого вектора
космического аппарата для указанной n'-й группы реактивных двигателей с текущими значениями этого вектора  и продолжение коррекции орбиты в случае выполнения условия
и продолжение коррекции орбиты в случае выполнения условия  , где
, где  - суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, а в противном случае прекращение коррекции орбиты, отличающийся тем, что по баллистической программе полета определяют интервал (τ0, τk) полетного времени космического аппарата для выполнения многоимпульсной коррекции орбиты и значение скорости коррекции
- суммарное значение вектора кинетического момента, определяющее допустимое расхождение его прогнозируемого значения с измеренным, а в противном случае прекращение коррекции орбиты, отличающийся тем, что по баллистической программе полета определяют интервал (τ0, τk) полетного времени космического аппарата для выполнения многоимпульсной коррекции орбиты и значение скорости коррекции  , определяют максимальное число L z-x временных интервалов коррекции ((t0z,tkz)∈(τ0,τk), z=1,2,...,L) и время середины каждого из z-x интервалов t' z, причем из условия
, определяют максимальное число L z-x временных интервалов коррекции ((t0z,tkz)∈(τ0,τk), z=1,2,...,L) и время середины каждого из z-x интервалов t' z, причем из условия  , где
, где  , M - масса космического аппарата, с учетом возможных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени
, M - масса космического аппарата, с учетом возможных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени  для начала коррекции орбиты на первом интервале, далее, исходя из условия
для начала коррекции орбиты на первом интервале, далее, исходя из условия  определяют длительность Δtz каждого из z-x интервалов при условии выполнения коррекций на каждом из них, определяют момент времени
определяют длительность Δtz каждого из z-x интервалов при условии выполнения коррекций на каждом из них, определяют момент времени  , соответствующий последнему из возможных моментов времени для начала коррекции орбиты на первом интервале, по измеренным на момент времени τ0 значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата определяют
, соответствующий последнему из возможных моментов времени для начала коррекции орбиты на первом интервале, по измеренным на момент времени τ0 значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата определяют  и с учетом влияния на космический аппарат внешних возмущающих моментов прогнозируют изменения кинетического момента космического аппарата от момента времени τ0 до
и с учетом влияния на космический аппарат внешних возмущающих моментов прогнозируют изменения кинетического момента космического аппарата от момента времени τ0 до  , на интервале
, на интервале  , определяют моменты времени
, определяют моменты времени  ,
,  ,
,  , соответствующие минимальным, и моменты времени
, соответствующие минимальным, и моменты времени  ,
,  ,
,  , соответствующие максимальным значениям компонентов вектора суммарного кинетического момента космического аппарата, с учетом которых задают возможные интервалы коррекции орбиты
, соответствующие максимальным значениям компонентов вектора суммарного кинетического момента космического аппарата, с учетом которых задают возможные интервалы коррекции орбиты  , где
, где  , j=min, max; q=x, y, z, на каждом из них прогнозируют вышеуказанным образом изменения вектора суммарного кинетического момента космического аппарата при работе n-х групп реактивных двигателей и определяют величины импульсов коррекции для каждой из указанных групп реактивных двигателей в интервалах времени
, j=min, max; q=x, y, z, на каждом из них прогнозируют вышеуказанным образом изменения вектора суммарного кинетического момента космического аппарата при работе n-х групп реактивных двигателей и определяют величины импульсов коррекции для каждой из указанных групп реактивных двигателей в интервалах времени  , а выбор n'-й группы реактивных двигателей для проведения коррекции орбиты на первом интервале производят из условия максимизации импульсов коррекции
, а выбор n'-й группы реактивных двигателей для проведения коррекции орбиты на первом интервале производят из условия максимизации импульсов коррекции  , причем для проведения коррекции выбирают интервал времени, на котором указанная n'-я группа реактивных двигателей имеет максимальный импульс, выполняют коррекцию орбиты данной n'-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на первом интервале определяют часть скорости коррекции
, причем для проведения коррекции выбирают интервал времени, на котором указанная n'-я группа реактивных двигателей имеет максимальный импульс, выполняют коррекцию орбиты данной n'-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на первом интервале определяют часть скорости коррекции  , отработанную с учетом ограничений по указанному допустимому расхождению
, отработанную с учетом ограничений по указанному допустимому расхождению  , из условия
, из условия  и с учетом указанных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени
и с учетом указанных ограничений на длительность интервала коррекции определяют первый из возможных моментов времени  для начала коррекции орбиты на втором интервале (z=2), исходя из условия
для начала коррекции орбиты на втором интервале (z=2), исходя из условия  , определяют длительность ΔtL-1 каждого из оставшихся интервалов при условии выполнения коррекции орбиты на всех оставшихся интервалах, определяют момент времени
, определяют длительность ΔtL-1 каждого из оставшихся интервалов при условии выполнения коррекции орбиты на всех оставшихся интервалах, определяют момент времени  соответствующий последнему из возможных моментов времени для начала коррекции орбиты на втором интервале, по измеренным на конец предыдущего интервала tk1 значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата определяют кинетический момент
соответствующий последнему из возможных моментов времени для начала коррекции орбиты на втором интервале, по измеренным на конец предыдущего интервала tk1 значениям кинетического момента силовых гироскопов и угловой скорости космического аппарата определяют кинетический момент  и с учетом влияния на космический аппарат внешних возмущающих моментов прогнозируют изменения суммарного вектора его кинетического момента за время от tk1 до
и с учетом влияния на космический аппарат внешних возмущающих моментов прогнозируют изменения суммарного вектора его кинетического момента за время от tk1 до  , на интервале
, на интервале  определяют максимальные значения компонентов данного суммарного вектора, соответствующие моментам времени
определяют максимальные значения компонентов данного суммарного вектора, соответствующие моментам времени  , с учетом этих компонентов задают возможные интервалы коррекции орбиты
, с учетом этих компонентов задают возможные интервалы коррекции орбиты  и по условию максимизации вышеуказанным образом определенных импульсов коррекции выбирают для коррекции орбиты n''-ю группу реактивных двигателей и интервал времени, на котором указанная n''-я группа имеет максимальный импульс, выполняют коррекцию орбиты n''-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на втором интервале определяют часть скорости коррекции
и по условию максимизации вышеуказанным образом определенных импульсов коррекции выбирают для коррекции орбиты n''-ю группу реактивных двигателей и интервал времени, на котором указанная n''-я группа имеет максимальный импульс, выполняют коррекцию орбиты n''-й группой реактивных двигателей на выбранном интервале, по результатам коррекции орбиты на втором интервале определяют часть скорости коррекции  , отработанную с учетом ограничений по указанному допустимому расхождению
, отработанную с учетом ограничений по указанному допустимому расхождению  , далее повторяют вышеуказанным образом определение интервалов для проведения очередных коррекций орбиты на z-x интервалах, при этом моменты времени
, далее повторяют вышеуказанным образом определение интервалов для проведения очередных коррекций орбиты на z-x интервалах, при этом моменты времени  определяют из условия
определяют из условия  , где а=1, 2, 3 ... - число интервалов, на которых проводилась коррекция орбиты космического аппарата, а длительность интервалов ΔtL-z+1 определяют из условия
, где а=1, 2, 3 ... - число интервалов, на которых проводилась коррекция орбиты космического аппарата, а длительность интервалов ΔtL-z+1 определяют из условия  , далее определяют
, далее определяют  , а прогноз изменений суммарного вектора кинетического момента космического аппарата осуществляют, начиная с момента времени tk(z-1) и заканчивая моментом
, а прогноз изменений суммарного вектора кинетического момента космического аппарата осуществляют, начиная с момента времени tk(z-1) и заканчивая моментом  , при этом на выбранных указанным образом n''...-х группах реактивных двигателей продолжают коррекцию орбиты на z-x интервалах до получения заданной величины скорости коррекции
, при этом на выбранных указанным образом n''...-х группах реактивных двигателей продолжают коррекцию орбиты на z-x интервалах до получения заданной величины скорости коррекции  .
.
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ, РАСПОЛОЖЕННЫХ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА | 2001 |
|
RU2197412C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2112716C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ | 1996 |
|
RU2112713C1 |
| US 5130931 A, 14.07.1992 | |||
| US 6089508 A, 18.07.2000. | |||

