ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Следующее описание относится, главным образом, к уменьшению уровня шума в данных и находит конкретное применение в компьютерной томографии (КТ), а также пригодно и в других способах визуализации, таких как гибридная ПЭТ/КТ система, цифровая рентгенографическая система и/или другой способ визуализации.
Сканер многосрезовой компьютерной томографии (КТ) включает в себя рентгеновскую трубку, установленную на вращающейся раме, которая вращается вокруг области обследования вокруг продольной или вертикальной оси. Рентгеновская трубка излучает радиацию, которая пересекает область обследования и субъект или объект внутри нее. Двумерная детекторная матрица образует угловую дугу напротив области обследования относительно рентгеновской трубки. Детекторная матрица включает в себя множество рядов детекторов, которые расположены в линию по отношению друг к другу и вытянуты вдоль вертикальной оси. Детекторы обнаруживают радиацию, которая пересекает область обследования и субъект или объект внутри нее, и генерируют данные проекции, являющиеся ее показателем. Устройство восстановления обрабатывает данные проекции и восстанавливает являющиеся ее показателем данные трехмерного (3D) объемного изображения. Данные объемного изображения обрабатываются для генерирования одного или более изображений области обследования, включая участок субъекта или объекта, расположенный внутри нее.
К сожалению, КТ сканеры излучают ионизирующую радиацию и, таким образом, подвергают пациента ионизирующей радиации, что может повысить риск рака. В общем случае доза радиации, проникшая в пациента, зависит от множества факторов, включая, но не ограничиваясь, ток трубки (мА/с), напряжение в трубке (пиковое напряжение в киловольтах), время вращения вокруг поперечной оси/пребывания в зоне воздействия (для спирального сканирования), толщина и расстояние между срезами (для осевого сканирования), число исследующих сканеров и телосложение пациента (например, более полное или худощавое). Проникшую дозу радиации можно сократить путем уменьшения тока трубки, напряжения в трубке и/или числа сканеров и увеличения вращения вокруг поперечной оси, толщины среза и/или расстояния между срезами. Однако шум изображения обратно пропорционален дозе радиации, и, таким образом, сокращение дозы радиации не только сокращает дозу, проникшую в пациента, но также увеличивает шум изображения в полученных данных, что распространяется на изображения во время восстановления, приводя к ухудшению качества изображения (то есть, более «шумным» изображениям), что может ухудшить диагностическую ценность процедуры.
Были применены алгоритмы уменьшения уровня шума на основании изображения. Однако они испытывают трудность при обработке «полосатых» изображений, где шум сильно коррелирует с соседними объемными элементами данных изображения. В общем случае, очень низкие уровни фотонного потока в измерениях проекций приводят к полосам в восстановленных изображениях. Также, когда среднее число обнаруженных фотонов очень мало (например, <10), то логарифмическая операция приводит к смещению, которое может проявиться в изображениях как сдвинутое среднее КТ число. Итеративные восстановления, такие как восстановления на основе метода максимального правдоподобия (МП), потенциально могут создать улучшенные изображения в таких случаях. Однако такие восстановления на основе МП весьма дороги в вычислительном отношении, что в настоящее время препятствует их широкому применению на практике.
Аспекты настоящего применения направлены на решение вышеуказанных и других проблем.
В соответствии с одним аспектом, система включает в себя источник, который вращается вокруг области обследования и излучает радиацию, которая пересекает область обследования, радиационно-чувствительную детекторную матрицу, которая обнаруживает радиацию, пересекающую область обследования, и генерирует данные проекции, являющиеся показателем обнаруженной радиации, и устройство уменьшения уровня шума в данных проекции, которое уменьшает уровень шума в данных проекции, причем устройство уменьшения уровня шума уменьшает уровень шума в проекции на основании числа обнаруженных фотонов для проекции.
В соответствии с другим аспектом, способ включает в себя получение данных проекции, генерированных системой формирования изображений, определение оцененного числа обнаруженных фотонов в двумерной проекции данных проекции и генерирование сигнала, являющегося ее показателем, и уменьшение уровня шума в проекции на основании сигнала. Степень уменьшения уровня шума пропорциональна оцененному числу обнаруженных фотонов для проекции, и происходит уменьшение уровня шума, по меньшей мере, в двух проекциях, в двух различных степенях.
В соответствии с другим аспектом, способ включает в себя уменьшение уровня шума в изображении, имеющем шум, который сильно взаимосвязан с соседними объемными элементами изображения, причем уменьшение уровня шума не вносит полосчатые искажения в изображение, прошедшее уменьшение уровня шума.
Изобретение может принимать форму в различных компонентах и порядке компонентов и в различных этапах и порядке этапов. Чертежи приведены только с целью иллюстрации предпочтительных вариантов воплощений и не ограничивают изобретение.
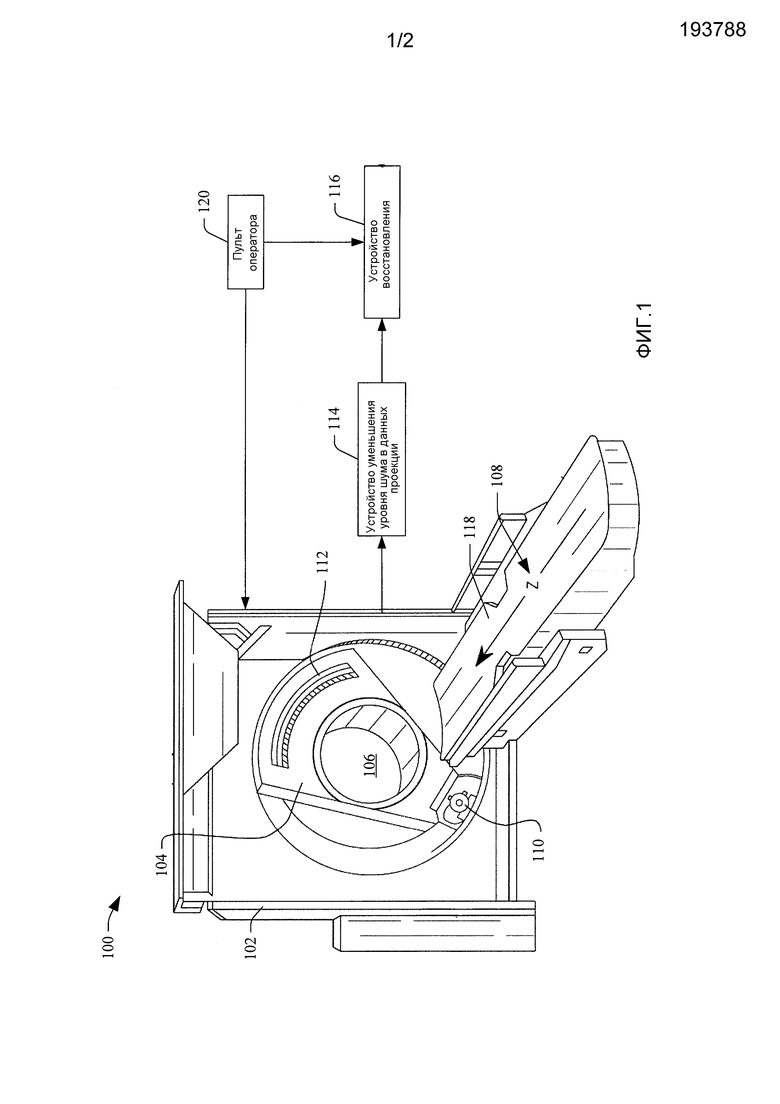
Фиг. 1 иллюстрирует пример системы формирования изображений в соединении с устройством уменьшения уровня шума в данных проекции.
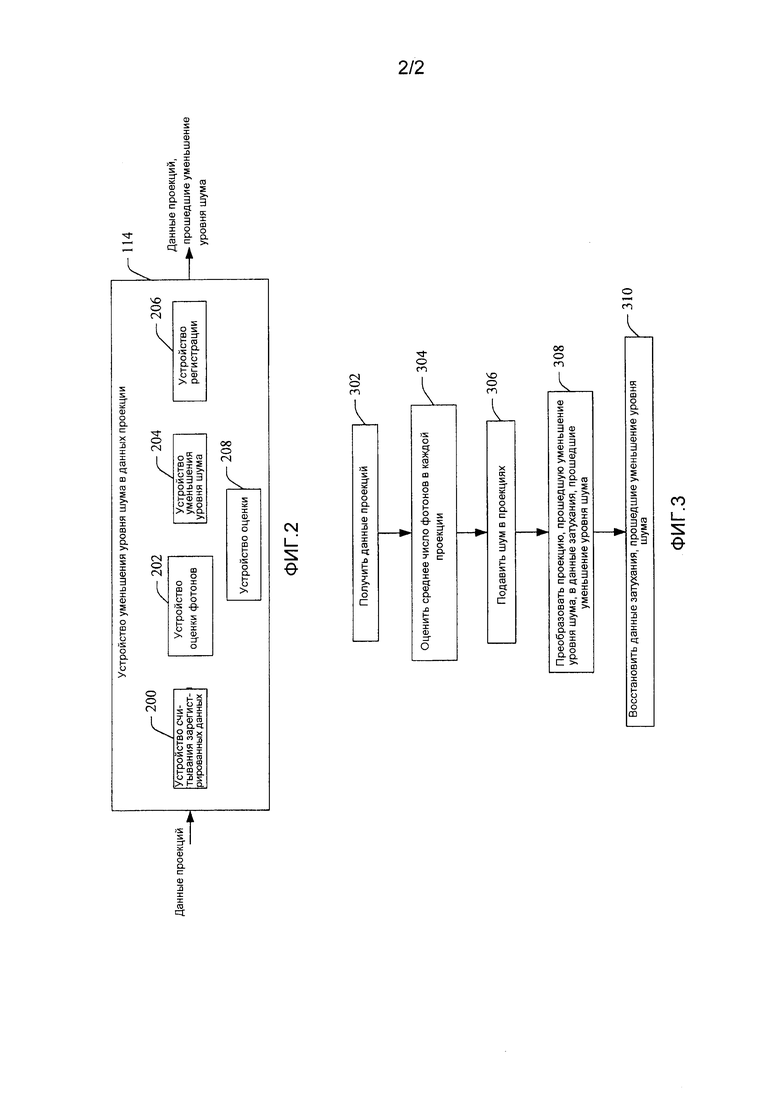
Фиг. 2 иллюстрирует пример устройства уменьшения уровня шума в данных проекции.
Фиг. 3 иллюстрирует пример способа уменьшения уровня шума в данных проекции с помощью устройства уменьшения уровня шума в данных проекции.
Фиг. 1 иллюстрирует систему 100 формирования изображений, такую как сканер (КТ) компьютерной томографии. Система 100 формирования изображений включает в себя стационарную раму 102 и вращающуюся раму 104. Вращающаяся рама 104 поддерживается с возможностью вращения стационарной рамой 102 и вращается вокруг области 106 обследования вокруг продольной или вертикальной оси 108.
Источник 110 радиации, такой как рентгеновская трубка, поддерживается с возможностью вращения вращающейся рамой 104. Источник 110 радиации вращается вместе с вращающейся рамой 104 и излучает радиацию, которая пересекает область 106 обследования. Коллиматор источника включает в себя элементы коллимации, которые коллимируют радиацию, чтобы сформировать луч радиации в целом в форме конуса, клина, веера или другой форме.
Двумерная радиационно-чувствительная детекторная матрица 112 образует угловую дугу напротив источника 110 радиации через область 106 обследования. Детекторная матрица 112 включает в себя множество рядов детекторов, которые располагаются вдоль направления 108 вертикальной оси. Детекторная матрица 112 обнаруживает радиацию, пересекающую область 106 обследования, и генерирует данные проекции, являющиеся ее показателем.
Устройство 114 уменьшения уровня шума в данных проекции (аппарат уменьшения уровня шума) уменьшает уровень шума в данных проекций. Как подробно описано далее, в одном случае, устройство 114 уменьшения уровня шума применяет алгоритм, в котором уменьшение уровня шума в проекциях, соответствующих меньшему числу фотонов, происходит более интенсивно, чем уменьшение уровня шума в проекциях, соответствующих большему числу фотонов. Такой алгоритм позволяет сокращать полосы и/или смещения в восстановленных изображениях вследствие меньшего числа фотонов (например, вследствие размера пациента, низкодозного сканирования и т.д.), одновременно сохраняя четкие градиенты (то есть границы) в данных и, таким образом, разрешение изображения.
Устройство 116 восстановления восстанавливает данные проекции, с уменьшенным уровнем шума, и генерирует данные трехмерного (3D) объемного изображения, являющиеся ее показателем. Устройство 116 восстановления может использовать обычное 3D восстановление обратной проекции с фильтрацией, алгоритм конического пучка, итеративный алгоритм и/или другой алгоритм.
Опора 118 пациента, например кушетка, поддерживает объект или субъект, то есть пациента, в области 106 обследования.
Вычислительная система общего назначения или компьютер служит в качестве пульта 120 оператора. Процессор пульта 120 выполняет машиночитаемые команды на пульте 126, который позволяет оператору управлять работой системы 100, а именно выбирать протокол сканирования полной дозой или низкой дозой, активировать уменьшение уровня шума в данных проекции, инициировать сканирование и т.д.
В иллюстрированном варианте воплощения, устройство 114 уменьшения уровня шума в данных проекции изображено как отдельный компонент. В другом варианте воплощения, устройство 114 уменьшения уровня шума в данных проекции является частью пульта 120 и/или другого вычислительного устройства.
Фиг. 2 иллюстрирует пример устройства 114 уменьшения уровня шума в данных проекции. Изображенное устройство 114 уменьшения уровня шума в данных проекции включает в себя устройство 200 считывания зарегистрированных данных, которое считывает зарегистрированные данные проекций, то есть преобразует линейные интегралы ослабления в обнаруженные фотоны.
Устройство 202 оценки фотонов оценивает число обнаруженных фотонов для каждой проекции и генерирует сигнал, являющийся ее показателем. Устройство 202 оценки фотонов может применять различные подходы к оценке числа фотонов. В качестве примера, обнаруженное число фотонов может быть оценено в качестве среднего числа обнаруженных фотонов для каждой проекции. Дополнительно, это среднее число может быть сглажено, например, с помощью скользящего среднего, что может способствовать уменьшению больших отклонений в пуассоновских случайных величинах для очень малого числа обнаруженных фотонов. Другие способы, включающие, но не ограничивающиеся широко известными способами оценки числа обнаруженных фотонов, также предусмотрены в настоящем изобретении.
Устройство 204 уменьшения уровня шума уменьшает уровень шума в обнаруженном сигнале фотонов на основании оцененного шума. Устройство 204 уменьшения уровня шума может уменьшать уровень шума в обнаруженных фотонах для двумерной проекции на основании одной только двумерной проекции или двумерной проекции и одной или более соседней двумерной проекции. Как отмечено выше, устройство 204 уменьшения уровня шума может применять алгоритм, который уменьшает уровень шума в проекциях, соответствующих меньшему числу фотонов, более интенсивно, чем в проекциях, соответствующих большему числу фотонов, что способствует уменьшению полос, сохраняя при этом границы.
Устройство 206 регистрации регистрирует обнаруженные фотоны, прошедшие уменьшение уровня шума, что преобразует обнаруженные фотоны, прошедшие уменьшение уровня шума, обратно в линейные интегралы ослабления, которые могут быть восстановлены устройством 116 восстановления.
Устройство 208 оценки может быть использовано для определения того, нужно ли уменьшать уровень шума в данной проекции на основании заранее заданного порогового значения числа фотонов. В таком случае, если оцененное число фотонов проекции указывает на то, что число фотонов достаточно для проекции, то уровень шума в проекции не уменьшается. В противном случае, уровень шума в проекции уменьшается. При уменьшении уровня шума только тех проекций, у которых недостаточно фотонов, может увеличиться скорость обработки по сравнению с уменьшением уровня шума в каждой проекции. В другом варианте воплощения, устройство 208 оценки можно опустить.
Следующее описание обеспечивает неограничивающий пример подходящего алгоритма уменьшения уровня шума, который основан на алгоритме минимизации полной вариации, обрабатывающем каждую 2D проекцию в качестве изображения. Также может быть применен подобный 3D способ с соответствующими изменениями конструкции.
Данные проекций компьютерной томографии (КТ) могут быть представлены, как изображено в Уравнении 1:
Уравнение 1:
 ,
,
в котором I представляет измеренные фотоны, I0 представляет входные фотоны, μ(х) представляет функцию ослабления, и l представляет линию накопления.
При данных характеристиках шума измерений фотонов I представляет средние измерения фотонов, а единственное фактическое измерение f является реализацией пуассоновских случайных величин со средним I и вероятностью 
Среднее измерение I фотонов может быть оценено из f путем минимизации функции издержек, выраженной как сумма члена полной вариации и члена взвешенных наименьших квадратов, как изображено в Уравнении 2:
Уравнение 2:
 ,
,
в котором ν представляет общее статистическое взвешивание, которое отдает предпочтение оригинальной проекции, когда шум мал, и предпочтение проекциям с малой полной вариацией, когда шум велик.
В общем случае, член полной вариации преобладает, когда оцененное число обнаруженных фотонов является более низким, а член взвешенных наименьших квадратов преобладает, когда оцененное число обнаруженных фотонов является более высоким.
В Уравнении 2, β является необязательной переменной, которая представляет собой настроечный параметр, управляющий интенсивностью алгоритма сглаживания, в которой меньшие величины β ведут, в целом, к более интенсивному сглаживанию.
Уравнение 2 может быть решено путем дискретизации дифференциального уравнения (PDE) с частными производными Эйлера-Лагранжа, как изображено в Уравнении 3:
Уравнение 3:
Уравнение 3 может быть выражено в членах оцененного среднего числа обнаруженных фотонов для каждой проекции, как изображено в Уравнении 4:
Уравнение 4:

в котором ρsm(m,r) представляет оцененное среднее число обнаруженных фотонов, m представляет число детекторов, а r представляет число рядов. Как описано подробнее ниже, ρsm(m,r) в Уравнении 4 извлекается путем извлечения сглаженной версии оригинального измерения f; однако, оцененное среднее число фотонов не нужно сглаживать. Целесообразно заменить ν в Уравнении 3 на ρsm(m,r), так как вариация шума зарегистрированных измерений пропорциональна 1/ρsm(m,r).
При масштабировании, как изображено в Уравнении 4, предпочтительна малая полная вариация в участках с высоким шумом (малое число фотонов) и близость к оригинальному изображению в участках с большим числом фотонов. Необходимо отметить, что также возможны другие формы масштабирования обнаруженных фотонов с помощью β. Например, в другом варианте воплощения, β может изменяться в зависимости от угла обзора.
Среднее число обнаруженных фотонов может быть оценено, как указано далее.
Начиная с ввода 2D проекции формы ρ(m,r), где данные находятся в зарегистрированной области ослабления, обнаруженное число фотонов, связанных с этим измерением, может быть оценено как среднее число обнаруженных фотонов ρsm(m,r) для каждой проекции.
Альтернативно, может быть использовано это среднее или сглаженное среднее. Сглаженное среднее способствует уменьшению больших отклонений в пуассоновских случайных величинах для очень маленького числа обнаруженных фотонов. В последнем случае, оцененное число фотонов сглаживается, например, с помощью скользящего среднего по оцененному числу обнаруженных фотонов, как изображено в Уравнении 5:
Уравнение 5:
в котором j ∈ {m-n:m+n}, k ∈ {r-n:r+n}, nKernel представляет ядро сглаживания, а n= (nKernel-1)/2. Другие подходы сглаживания также учтены в настоящем изобретении. Для детекторов на границах проекции значения могут быть экстраполированы либо иначе определены для заполнения необходимого буфера.
Уравнение 4 может быть решено с помощью использования Уравнения 5 на основании подхода итеративной фиксированной точки, при котором каждое обновление i+1 определяется из предыдущего обновленного изображения i, в соответствии с Уравнением 6:
Уравнение 6:
 ,
,
в котором ρeff(m,r)=β*ρxm(m,r), а Wp представляет веса, которые могут быть вычислены различными способами, например, как известно из уровня техники.
Обнаруженные фотоны, прошедшие уменьшение уровня шума, регистрируются, как изображено в Уравнении 7:
Уравнение 7:
 ,
,
в котором ρout(m,r) представляет вывод зарегистрированных обнаруженных фотонов, прошедших уменьшение уровня шума, ρdn(m,r) представляет обнаруженные фотоны, прошедшие уменьшение уровня шума, Nr(m,r) представляет число фотонов, а s представляет масштабирующий множитель. Уравнение 7 преобразует обнаруженные фотоны, прошедшие уменьшение уровня шума, обратно в линейные интегралы ослабления для восстановления.
Вышеописанный алгоритм уменьшения уровня шума эффективен с точки зрения вычисления, например, потому что операция уменьшения уровня шума применяется только один раз к данным проекции в момент получения, за ней следует единственное восстановление обратной проекции с фильтрацией, и не требуется сложных вычислений множества прямых и обратных проекций, как при итеративном подходе максимального правдоподобия.
Дополнительно, вышеописанный алгоритм уменьшения уровня шума обеспечивает значительное сокращение полос в восстановленных изображениях, при этом не влияя на проекции с хорошей статистикой, по отношению к конфигурации, при которой алгоритм уменьшения уровня шума не применяется к проекциям. С помощью применения алгоритма уменьшения уровня шума в области считывания зарегистрированных проекций также можно уменьшить смещение при малом подсчете фотонов.
Фиг. 3 иллюстрирует пример способа уменьшения уровня шума в данных проекции.
На этапе 302, получают множество сигналов двумерных проекций (данные проекций). Проекция может быть генерирована системой 100 и/или другой системой формирования изображений.
На этапе 304, среднее число обнаруженных фотонов оценивается для каждой проекции.
На этапе 306, по меньшей мере, подмножество проекций проходят уменьшение уровня шума с помощью алгоритма, который отдает предпочтение оригинальным проекциям, если шум мал, и предпочтение проекциям с малой полной вариацией, если шум велик, как описано в настоящем документе. Как отмечено выше, проекция, имеющая достаточное число фотонов, не нуждается в уменьшении уровня шума.
На этапе 308, проекции, прошедшие уменьшение уровня шума, преобразуются в данные ослабления, прошедшие уменьшение уровня шума.
На этапе 310, данные ослабления, прошедшие уменьшение уровня шума, восстанавливаются, чтобы генерировать одно или несколько изображений.
Вышеописанное может быть осуществлено с помощью машиночитаемых команд, которые при их выполнении компьютерным процессором (процессорами) заставляют процессор (процессоры) выполнять описанные действия. В таком случае, команды хранятся на машиночитаемом носителе данных, связанном с или иначе доступным на соответствующем компьютере.
Понятно, что устройство 114 уменьшения уровня шума в данных проекции может быть осуществлено с помощью одного или более процессоров, которые выполняют одну или более машиночитаемых и/или выполняемых компьютером команд, хранящихся или закодированных на машиночитаемом носителе данных, таком как физическая память. Дополнительно или альтернативно, команды могут храниться на временном носителе данных, таком как носитель сигналов или тому подобное.
Изобретение описано в настоящем документе со ссылками на различные варианты воплощения. Модификации и изменения будут очевидны при прочтении настоящего описания. Предполагается, что изобретение должно толковаться как включающее в себя все подобные модификации и изменения, если они попадают в объем приложенной формулы изобретения или ее эквивалентов.
Группа изобретений относится к медицинской технике, а именно к средствам компьютерной томографии. Система формирования изображений содержит источник, который вращается вокруг области обследования и излучает радиацию, которая пересекает область обследования, радиационно-чувствительную детекторную матрицу, устройство оценки, которое определяет, уменьшен ли уровень шума в проекции, на основании числа обнаруженных фотонов для проекции, и аппарат уменьшения уровня шума в данных проекции на основании числа обнаруженных фотонов для проекции, при этом по меньшей мере одна проекция включает в себя число обнаруженных фотонов, которое соответствует заранее заданному пороговому значению числа фотонов, и уровень шума в которой не уменьшен, и по меньшей мере одна проекция включает в себя число обнаруженных фотонов, которое не соответствует заранее заданному пороговому значению числа фотонов, и уровень шума в которой уменьшен. Способ уменьшения уровня шума в проекции заключается в получении данных проекции, генерированных системой формирования изображений, определении оцененного числа обнаруженных фотонов для двумерной проекции данных проекции и генерировании сигнала, являющегося его показателем, и уменьшении уровня шума в проекции на основании упомянутого сигнала. Использование изобретений позволяет уменьшить уровень шума на основании изображения. 2 н. и 11 з.п. ф-лы, 3 ил.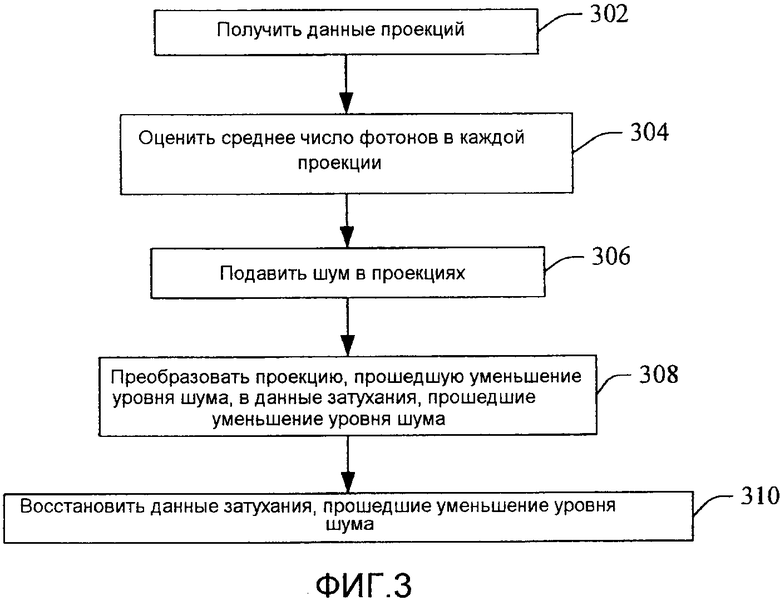
1. Система формирования изображений, содержащая:
источник, который вращается вокруг области обследования и излучает радиацию, которая пересекает область обследования;
радиационно-чувствительную детекторную матрицу, которая обнаруживает радиацию, пересекающую область обследования, и генерирует данные проекции, являющиеся показателем обнаруженной радиации;
устройство оценки, которое определяет, уменьшен ли уровень шума в проекции, на основании числа обнаруженных фотонов для проекции; и
аппарат уменьшения уровня шума, который уменьшает уровень шума в данных проекции на основании числа обнаруженных фотонов для проекции,
при этом по меньшей мере одна проекция включает в себя число обнаруженных фотонов, которое соответствует заранее заданному пороговому значению числа фотонов, и уровень шума в которой не уменьшен, и по меньшей мере одна проекция включает в себя число обнаруженных фотонов, которое не соответствует заранее заданному пороговому значению числа фотонов, и уровень шума в которой уменьшен.
2. Система по п. 1, в которой аппарат уменьшения уровня шума содержит
устройство оценки фотонов, которое оценивает число обнаруженных фотонов для каждой проекции, причем аппарат уменьшения уровня шума уменьшает уровень шума в данных проекции на основании оцененного числа обнаруженных фотонов.
3. Система по п. 2, в которой оцененное число обнаруженных фотонов представляет собой сглаженное скользящее среднее по оцененному числу обнаруженных фотонов.
4. Система по п. 2, в которой аппарат уменьшения уровня шума дополнительно содержит
устройство уменьшения уровня шума, которое уменьшает уровень шума в проекциях на основании минимизации функции издержек, включающей в себя по меньшей мере два члена, первый член полной вариации и второй член взвешенных наименьших квадратов, и оцененное число обнаруженных фотонов.
5. Система по п. 2, в которой аппарат уменьшения уровня шума дополнительно содержит
устройство уменьшения уровня шума, которое уменьшает уровень шума в проекции путем отдачи предпочтения проекции, когда оцененное число обнаруженных фотонов велико, и предпочтения проекциям с малой полной вариацией, когда оцененное число обнаруженных фотонов мало.
6. Система по п. 4, в которой устройство уменьшения уровня шума применяет итеративный алгоритм для минимизации функции издержек.
7. Система по п. 1, дополнительно содержащая
устройство восстановления, которое восстанавливает данные проекции, прошедшие уменьшение уровня шума, чтобы генерировать данные объемного изображения.
8. Система по п. 1, в которой аппарат уменьшения уровня шума уменьшает уровень шума в проекциях, имеющих меньшее число фотонов, в большей степени, чем в проекциях, имеющих большее число фотонов.
9. Система по п. 1, в которой аппарат уменьшения уровня шума уменьшает уровень шума, сохраняя при этом заданное разрешение изображения.
10. Способ уменьшения уровня шума в проекции, содержащий:
получение данных проекции, генерированных системой формирования изображений;
определение оцененного числа обнаруженных фотонов для двумерной проекции данных проекции и генерирование сигнала, являющегося его показателем; и
уменьшение уровня шума в проекции на основании упомянутого сигнала.
11. Способ по п. 10, в котором степень уменьшения уровня шума пропорциональна оцененному числу обнаруженных фотонов для проекции, и уровень шума в по меньшей мере двух проекциях уменьшают в двух различных степенях, причем уменьшение уровня шума проекции включает в себя минимизацию функции издержек, которая включает в себя член полной вариации и член взвешенных наименьших квадратов, причем член полной вариации преобладает, когда оцененное число обнаруженных фотонов является более низким, и член взвешенных наименьших квадратов преобладает, когда оцененное число обнаруженных фотонов является более высоким, и причем функция издержек отдает предпочтение проекции, когда оцененное число обнаруженных фотонов велико, и отдает предпочтение проекциям с малой полной вариацией, когда оцененное число обнаруженных фотонов мало.
12. Способ по п. 10, дополнительно содержащий
уменьшение уровня шума только в тех проекциях, которые имеют оцененное число фотонов, несоответствующее заранее заданному пороговому значению, и уменьшение уровня шума в оставшихся проекциях в некоторой степени на основании соответственного оцененного числа фотонов.
13. Способ по п. 10, дополнительно содержащий
сглаживание оцененного числа обнаруженных фотонов путем использования скользящего среднего по оцененному числу обнаруженных фотонов, причем проекции уменьшают уровень шума на основании сглаженного оцененного числа обнаруженных фотонов.
| US 2003219152 A1, 27.11.2003 | |||
| US 6507633 B1, 14.01.2003 | |||
| US 2003076988 A1, 24.04.2003 | |||
| СИСТЕМА ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2047276C1 |

