Изобретение касается аппаратов для перемещения, используемых на заводах по производству алюминия путем электролиза расплава по способу Холла-Эру. Оно относится, в особенности, к устройствам для перемещения соединителей, которые обеспечивают крепление и электрический контакт анодов на анодной раме.
Алюминиевый металл в промышленных масштабах производится электролизом расплава, а именно электролизом раствора глинозема в ванне расправленного криолита, называемой электролитной ванной, по хорошо известному способу Холла-Эру. Электролитная ванна содержится в емкостях, называемых «электролизными емкостями», содержащими стальную камеру, которая изнутри покрыта отражающими и/или изолирующими материалами, и катодную систему, расположенную на дне емкости. Аноды, обычно из углеродного материала, частично погружены в ванну электролита. Совокупность, образованная электролизной емкостью, ее анодами и электролитной ванной, называется электролизной ячейкой.
Аноды снабжены металлическим стержнем, предназначенным для электрического и механического соединения с металлической рамой, называемой анодной рамой, которая подвижна относительно неподвижной портальной опоры, расположенной над электролизной емкостью. Анодные стержни соединены с анодной рамой с использованием съемных соединителей, надеваемых на опорные крюки, расположенные с обеих сторон анодных стержней и которыми можно маневрировать для прижатия анодных стержней к анодной раме. Французский патент FR 2 039 543 (соответствующий американскому патенту US 3 627 670) описывает такие устройства, которые содержат зажимной винт, приведение в движение которого позволяет размещать соединитель в зажатом состоянии, когда он прижимает анодный стержень к анодной раме для обеспечения электрического контакта, и в разжатом состоянии, когда он может быть снят для отсоединения анодного стержня.
При работе электролизный завод требует технического обслуживания электролизных ячеек, включающего, в том числе, в частности, замены использованных анодов новыми анодами. Для осуществления этого заводы обычно снабжены, по меньшей мере, блоком подъема и перемещения, содержащим мостовой кран, который может перемещаться над электролизными ячейками и вдоль последних, и тележку, снабженную несколькими органами перемещения и технического обслуживания (часто называемыми «инструментами»). Такой блок подъема и перемещения может быть, в частности, снабжен органом для перемещения соединителей, в особенности для их установки на место, их подъема и их транспортировки, таких как соединитель, описанный во французской заявке FR 2 039 543.
Однако может случиться, что соединитель не будет хорошо захвачен органами перемещения, что может привести к неожиданному падению соединителя, обычно при транспортировке или в процессе установки на опорные крюки. В своем патенте US 7 344 625 Заявитель предложил простой и малогабаритный орган перемещения анодных соединителей. Этот орган перемещения предназначен для установки на место, подъема и транспортировки анодного соединителя, снабженного двумя боковыми пальцами и одним зажимным винтом, таким, как раскрыт в заявке US 7 344 625 и вновь изображен на фиг. 3А и 3В. Этот орган перемещения содержит зажимной орган, который взаимодействует с зажимным винтом для возможности изменения состояния зажимания соединителя, и блокирующую систему, которая взаимодействует с упомянутым зажимным органом для удержания соединителя, блокированного в определенном положении в органе перемещения, когда соединитель разжат зажимным органом. Он содержит, кроме того, две подвижных детали, имеющих открытое положение и закрытое положение, и способные служить опорой соединителю, когда они находятся в закрытом положении и когда вследствие неисправности соединитель не удерживается или больше не удерживается блокирующей системой.
В этом устройстве подвижные части переходят из одного положения в другое под действием кулачков, которые взаимодействуют с верхней поверхностью опорных крюков в процессе вертикального направленного вниз смещения органа перемещения. На практике эти подвижные части подвергаются частым ударам и скручиваются или легко сгибаются, так что они защемляются или закрываются, и их конец больше не проходит под пальцами, и они больше не могут служить средством безопасного удержания в случае, когда соединитель больше не удерживается блокирующей системой. Это вызывает многочисленные обращения к техническому обслуживанию этого устройства, которые сводятся к частым заменам подвижных элементов. Для исключения этих недостатков Заявитель решил разработать более прочный и более надежный орган перемещения соединителей.
Объектом изобретения является орган перемещения, предназначенный, в частности, для надежного и долговечного обеспечения перемещения анодного соединителя электролизной ячейки, при этом установка и крепление последнего на анодной раме для осуществления электрического контакта между стержнем анода и анодной рамой, а также его снятия, орган перемещения выполнен таким образом, что риск случайного падения упомянутого соединителя при манипуляциях с ним мал, насколько возможно.
Первым объектом изобретения является орган перемещения соединителя для соединения стержня анода на анодной раме ячейки для производства алюминия электролизом расплава, при этом упомянутый соединитель снабжен двумя боковыми пальцами, выполненными с возможностью взаимодействия с опорными крюками, жестко соединенными с упомянутой анодной рамой и размещенными с обеих сторон анодного стержня для прижатия упомянутого анодного стержня к упомянутой анодной раме, причем упомянутый орган перемещения содержит, по меньшей мере, направляющий орган, содержащий вырез, связанный с каждым из упомянутых пальцев и предназначенный для приема упомянутого пальца, упомянутый орган перемещения, отличающийся тем, что он также содержит:
- по меньшей мере, один захватывающий орган, имеющий открытое положение и закрытое положение, при этом упомянутый направляющий орган и упомянутый захватывающий орган взаимодействуют таким образом, что когда упомянутый захватывающий орган находится в открытом положении, каждый палец может быть вставлен в упомянутый вырез или извлечен из него, а когда упомянутый захватывающий орган находится в закрытом положении, каждый палец может осуществить только ограниченное перемещение в упомянутом вырезе между положением, называемым «нижним», соответствующим контакту с упомянутым захватывающим органом, и положением, называемым «верхним»;
- приводную систему, соединенную с упомянутым захватывающим органом, выполненную с возможностью его перемещения между упомянутыми открытым и закрытым положениями,
- по меньшей мере, блокирующую систему, имеющую заблокированное положение и разблокированное положение, выполненную с возможностью блокирования упомянутого захватывающего органа, когда он находится в положении блокирования, и выполненную с возможностью перехода из заблокированного положения в разблокированное положение, когда упомянутые пальцы находятся в верхнем положении.
Расположение захватывающего органа и блокирующей системы таково, что:
а) когда упомянутый орган перемещения снабжен соединителем и перемещается для того, чтобы разместить его на опорных крюках анодной рамы, блокирующая система находится в заблокированном положении и блокирует захватывающий орган в закрытом положении, удерживая пальцы соединителя. Вследствие силы тяжести пальцы находятся в нижнем положении, в контакте с захватывающим органом, который, предпочтительно, содержит впадины, выполненные с возможностью образования посадочного места, в котором может находится палец. Подойдя сверху к опорным крюкам, орган перемещения опускается, пока пальцы не лягут на опорные крюки. При продолжении опускания захватывающего органа пальцы теряют контакт с упомянутым захватывающим органом и перемещаются в вырез до тех пор, пока не достигнут своего верхнего положения, где они, например, приводя подвижную деталь, жестко соединенную с блокирующей системой, переведут упомянутую блокирующую систему из заблокированного положения в разблокированное положение, позволяя, таким образом, упомянутому захватывающему органу перейти в открытое положение. Как только приводная система приводится в действие для установки захватывающего органа в открытое положение, орган перемещения, обычно соединенный с обслуживающей машиной, осуществляет вертикальное направленное вверх движение, освобождая соединитель, который он транспортировал;
b) когда упомянутый орган перемещения является пустым и перемещается для захвата соединителя, находящегося на опорных крюках анодной рамы, и извлечения его из этого положения, захватывающий орган удерживается в открытом положении. Подойдя сверху к соединителю, который покоится на опорных крюках, орган перемещения опускается, пока пальцы не войдут в упомянутые вырезы и не займут их верхнего положения, или, например, путем привода подвижной детали, жестко соединенной с упомянутой блокирующей системой, они переведут блокирующую систему в разблокированное положение, позволяя, таким образом, упомянутому захватывающему устройству перемещаться из открытого положения в закрытое положение для захвата пальцев. Орган перемещения поднимают таким образом, чтобы пальцы находились в нижнем положении, которое соответствует контакту с упомянутым захватывающим органом. Продолжая движение подъема, соединитель увлекается захватывающим органом, при этом пальцы остаются в контакте с захватывающим органом, обычно вследствие гравитации, располагаясь на впадинах упомянутого захватывающего органа, образующего посадочные места для упомянутых пальцев.
В противовес органу перемещения, описанному в US 7 344 625, блокирование соединителя в органе перемещения не зависит от зажимного/разжимного устройства соединителя и может быть использовано для перемещения соединителей различного типа, например, которые не требуют приведения в движение зажимного винта. Однако предпочтительный вариант осуществления изобретения, предназначенный для манипуляций соединителями, снабженными зажимным винтом, включает в себя также зажимное/разжимное устройство зажимного винта соединителя, причем последний не обязательно соединен с системой блокирования соединителя.
Подвижные элементы из US 7 344 625, которые служат опорой безопасности для пальцев, заменены в данном случае захватывающим органом, предназначенным для того, чтобы служить «постоянной» опорой упомянутым пальцам, когда последние находятся в нижнем положении в вырезах упомянутого органа перемещения. Захватывающий орган перемещается между своим открытым положением и своим закрытым положением, используя автономную приводную систему. Так что перемещение захватывающего органа, который больше не зависит от эффекта взаимодействия кулачков с верхней поверхностью крюков, может осуществляться независимо от изношенного или деформированного состояния упомянутого захватывающего органа.
С другой стороны, захватывающий орган соединен с блокирующей системой, которая может разблокироваться - для обеспечения органу перемещения возможности перейти из его закрытого положения в его открытое положение - только, если пальцы соединителя, введенные в вырезы, находятся в верхнем положении. Блокирующая система содержит подвижную деталь, способную перемещаться между двумя положениями: положением разблокирования, когда захватывающий орган может свободно перемещаться, и положением блокирования, когда она препятствует перемещению захватывающего органа в направлении его открытого положения, если он находится в закрытом положении, и в направлении его закрытого положения, если он находится в открытом положении. Предпочтительно, блокирующее положение достигается упомянутой подвижной деталью, когда она входит в контакт с пальцем и приводится упомянутым пальцем при его ходе в верхнее положение. Эта подвижная деталь может перемещаться, поворачиваясь вокруг оси, жестко соединенной с органом перемещения соединителя или направляясь при перемещении связью скользящего типа.
Предпочтительно, упомянутая блокирующая система соединена с приводом, который, когда упомянутый палец не находится в верхнем положении, заставляет перейти упомянутую подвижную деталь из ее положения разблокирования в ее положение блокирования. Таким образом, как только палец не находится больше в верхнем положении, блокирующая система находится в своем блокированном положении, которое мешает несвоевременному открыванию или закрыванию захватывающего органа. Упомянутый привод является упругим средством, обычно пружиной сжатия, жесткость которой достаточно мала, чтобы подвижная часть блокирующей системы могла захватываться упомянутым пальцем при его движении к его верхнему положению.
При нормальном перемещении верхнее положение пальцев может быть достигнуто только путем перемещения вниз органа перемещения при неподвижном соединителе, обычно находящемся на опорных крюках анодной рамы.
Предпочтительно, приводная система захватывающего органа представляет собой силовой цилиндр, обычно пневматический, содержащий шток, два крайних положения хода которого соответствуют упомянутому открытому положению и упомянутому закрытому положению соответственно. Предпочтительно, для отслеживания положения подвижной детали блокирующей системы предусмотрены датчики положения для исключения включения приводной системы, когда блокирующая система находится в положении блокирования (дублированная безопасность).
В предпочтительном варианте изобретения захватывающий орган содержит два фланца, каждый из которых соединен с пальцем и приводится одной приводной системой. Кроме того, блокирующая система предпочтительно содержит два блокирующих устройства, каждое из которых соединено с пальцем.
Упомянутый захватывающий орган является, предпочтительно, поворотным элементом, предпочтительно системой поворотных фланцев, внешний контур которых в плоскости, перпендикулярной оси поворота, имеет рельеф типа шипов или пазов, которые взаимодействуют с рельефом блокирующей системы, и выступ, который образует препятствие на входе выреза, когда упомянутый захватывающий орган находится в закрытом положении, и который обычно имеет впадину, способную образовать посадочное место, в котором может находиться палец. С- или L-образные формы хорошо адаптированы для этого поворотного элемента, но подходят также другие, более компактные формы, как изображено на фиг.4.
Подвижная деталь блокирующей системы предпочтительно снабжена двумя стенками, которые, когда упомянутая подвижная деталь находится в положении блокирования, образуют упоры для перемещения упомянутого рельефа захватывающего органа: упорная стенка для открывания, которая препятствует перемещению упомянутого рельефа, когда упомянутый захватывающий орган должен перейти из своего закрытого положения к своему открытому положению, и упорная стенка для закрывания, которая препятствует перемещению упомянутого рельефа, когда упомянутый захватывающий орган должен перейти из своего открытого положения в свое закрытое положение.
Объектом изобретения является также блок подъема и перемещения, содержащий, по меньшей мере, орган перемещения соединителей по изобретению.
Объектом изобретения является также применение органа перемещения согласно изобретению на заводе по производству алюминия электролизом расплава.
Объектом изобретения является также применение блока подъема и перемещения на заводе по производству алюминия электролизом расплава.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
- фиг. 1 изображает вид в перспективе обычной электролизной ячейки, предназначенной для производства алюминия;
- фиг. 2 изображает в поперечном разрезе обычный электролизный цех, предназначенный для производства алюминия;
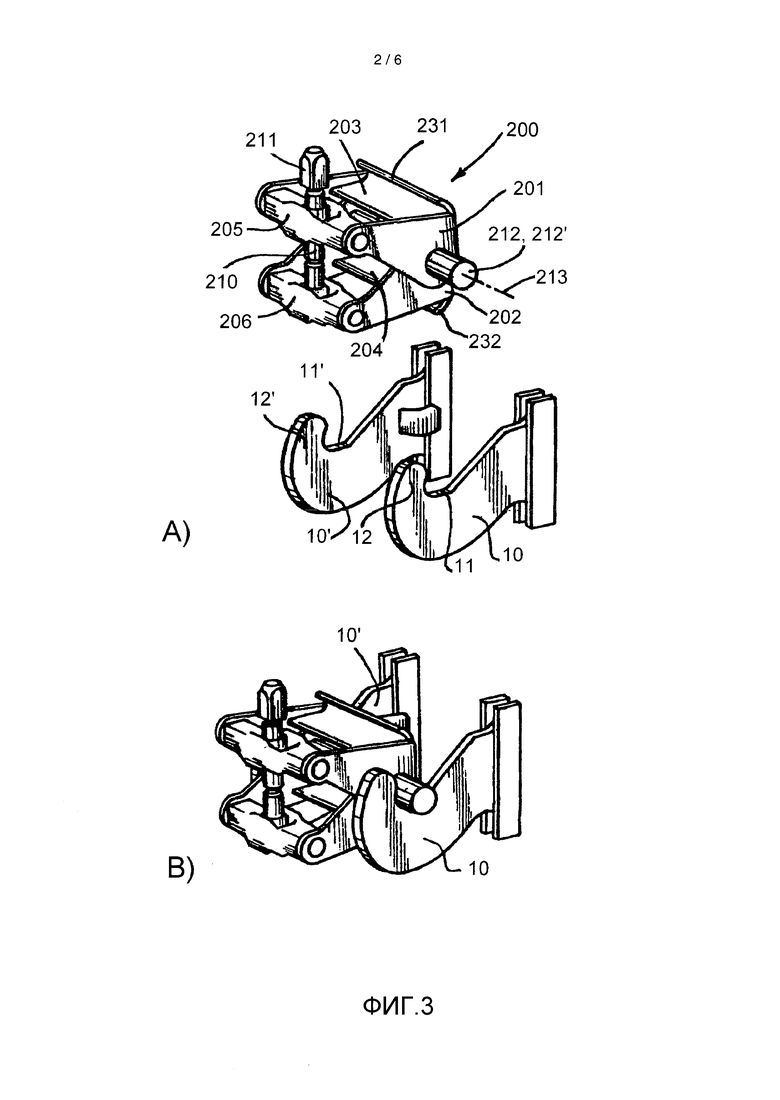
- фиг. 3А изображает, вид в перспективе, анодный соединитель и опорные крюки для упомянутого соединителя (анодная рама, с которой они прикреплены, не изображена);
- фиг. 3В изображает тот же соединитель на опорных крюках для прижатия анода (не изображенного на чертеже) на анодную раму;
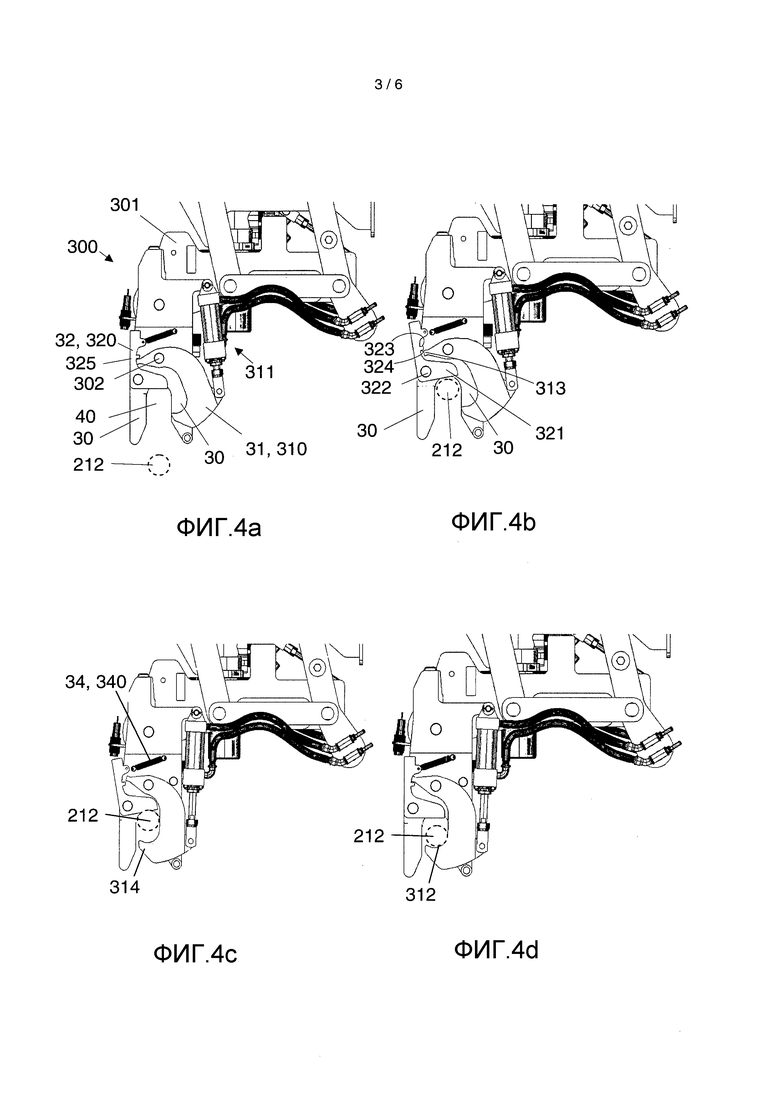
- фиг. 4а-4d изображают на виде сбоку первый орган перемещения соединителя согласно изобретению со своей фиксирующей пластиной;
- фиг. 5а-5d изображают на виде сбоку второй орган перемещения соединителя согласно изобретению;
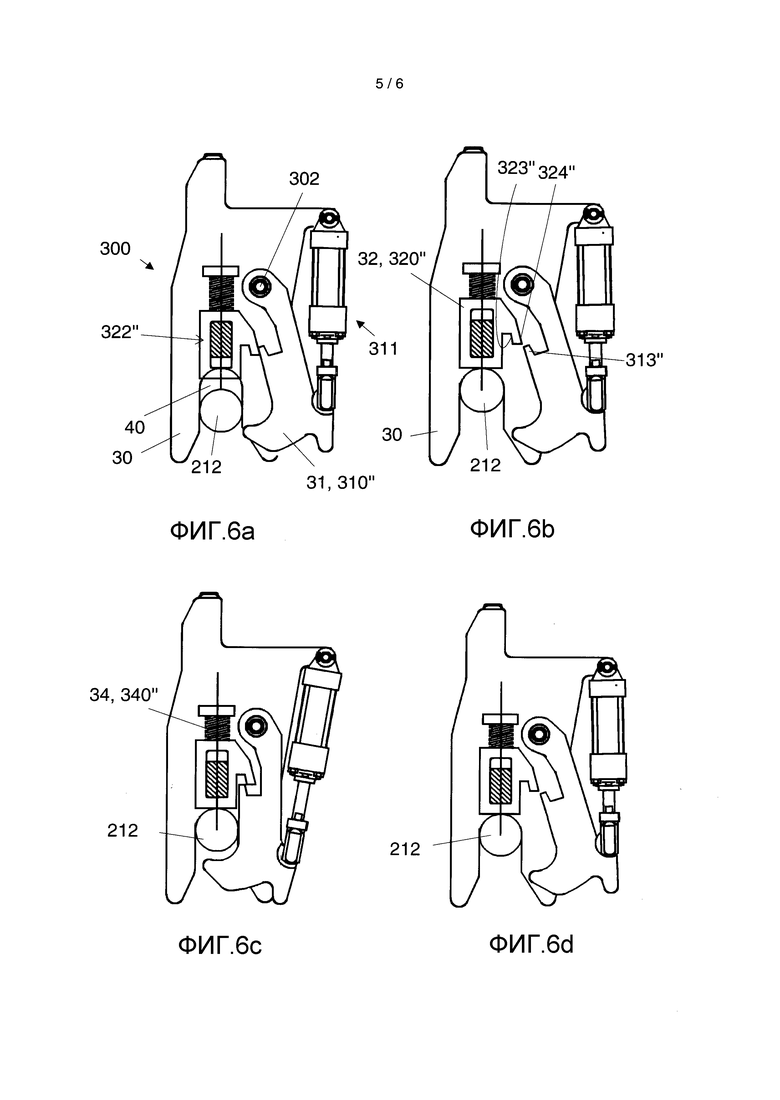
- фиг. 6а-6d изображают на виде сбоку третий орган перемещения соединителя согласно изобретению;
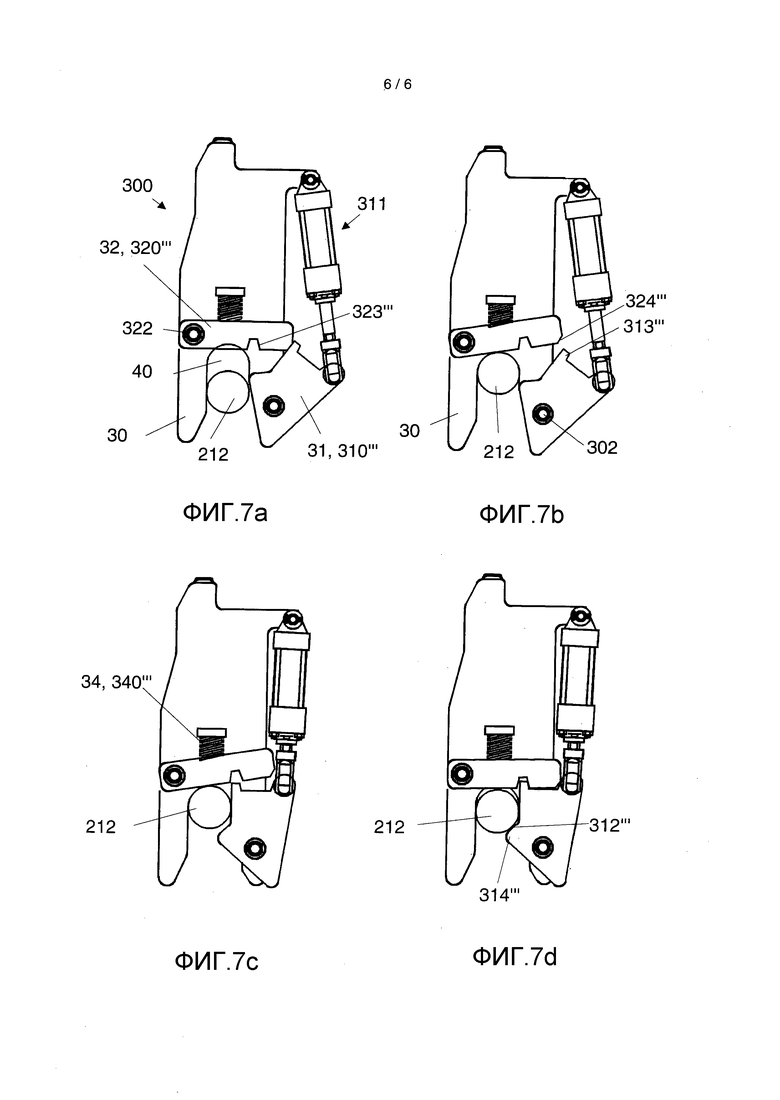
- фиг. 7а-7d изображают на виде сбоку четвертый орган перемещения соединителя согласно изобретению.
Электролизные заводы, предназначенные для производства алюминия, содержат один или несколько электролизных цехов (100), включающих большое количество электролизных ячеек (1), обычно, расположенных рядами или линиями (обычно одна рядом с другой или попарно), при этом каждый ряд или линия содержат обычно одну или несколько сотен ячеек. Как изображено на фиг. 1, электролизная ячейка (1) содержит емкость (2), предназначенную для жидкого металла и электролитной ванны, надстройку (3) и аноды (8), обычно предварительно спеченные аноды. Надстройка (3) содержит неподвижную П-образную опору и подвижную металлическую анодную раму (5). Аноды (8) снабжены металлическим стержнем (9), предназначенным для крепления и электрического присоединения анодов (8) к анодной раме (5). Надстройка (3) содержит также, по меньшей мере, силовой цилиндр (не изображенный на чертеже), соединенный с анодной рамой (5) тягами (6) и рычагами (7). Анодная рама (5) может перемещаться вертикально (вверх или вниз) под действием одного или нескольких силовых цилиндров.
Анодные стержни (9) закреплены на анодной раме (5) посредством соединителей, таких как изображены на фиг.3А. Этот соединитель (200) содержит два рычага (201, 202), способных поворачиваться вокруг общей оси (213), зажимные средства (205, 206, 210, 211) для сочленения упомянутых рычагов (201, 202) и двух боковых пальцев (212, 212'), расположенных с каждой стороны соединителя. Боковые пальцы (212, 212') образуют обычно общую ось (213) и образованы обычно концами штока, который пересекает соединитель с одной стороны до другой. Упомянутые пальцы (212, 212') предназначены для размещения в полостях (11, 11') крюков (10, 10'), закрепленных на анодной раме (5) и расположенных с обеих сторон анодного стержня (9).
Соединитель (200) имеет по меньшей мере первое состояние, называемое зажатым состоянием, и второе состояние, называемое разжатым состоянием. Когда соединитель (200) установлен в фиксирующих крюках (10, 10'), как показано на фиг.3В, зажатое состояние позволяет либо зафиксировать анодный стержень (9) на анодной раме (5), либо освободить анодный стержень (9): в зажатом состоянии, соединитель (200) прикладывает давление на анодный стержень (9) и прижимает его на анодной раме (5); в разжатом состоянии, соединитель не прикладывает давление на анодный стержень (9), так что соединитель и анод могут быть извлечены.
Соединитель (200) может проходить между этими двумя состояниями зажимания путем воздействия зажимных средств (205, 206, 210, 211). Эти средства содержат обычно один винт (210), выполненный с возможностью взаимодействия с внешним зажимным органом, обычно закрепленным на органе (300) перемещения. Зажимной винт (210) обычно снабжен головкой (211), выполненной с возможностью введения в зажимной орган, который приводится в действие для зажимания или разжимания соединителя (200). Зажимные средства содержат также гайки (205, 206), прикрепленные к рычагам (201, 202) соединителя, предпочтительно подвижно, и выполненные с возможностью взаимодействия с винтом (210) для обеспечения сочленения рычагов (201, 202) и зажимания/разжимания соединителя (200). Рычаги (201, 202) соединителя (200) содержат обычно траверсы (203, 204), предназначенные, в частности, для передачи прямого или косвенного давления зажимания соединителя об анодные стержни.
Как изображено на фиг. 2, электролизные цехи (100) содержат, обычно, по меньшей мере, один блок подъема и перемещения, называемый машиной обслуживания (20) и обозначаемой аббревиатурой «MSE». Упомянутый блок (20) содержит обычно мостовой кран (21), перемещающийся вдоль электролизных ячеек по рольгангам (23, 23'), тележку (22), выполненную с возможностью перемещения по мостовому крану (21), и органы перемещения и обслуживания (30), часто называемые «инструментами», такие как орган перемещения (300) анодных соединителей (200). Орган перемещения (300) содержит обычно плоскую часть (301), закрепленную на конце подвижного вертикального рычага (24), например, последнего сегмента телескопического плеча, жестко соединенного с револьверной головкой, поворотной вокруг вертикальной оси, соединенной с тележкой (22).
Примеры 1-4 иллюстрируют четыре варианта воплощения органа перемещения соединителей согласно изобретению, которые, в основном различаются формой захватывающего органа и блокирующей системой.
ПРИМЕР 1 (фиг.4а-4d)
Первым примером является орган перемещения (300) соединителя, который установлен на конце телескопического плеча с помощью фиксирующей пластины (301). Упомянутый орган перемещения содержит направляющий орган (30), который имеет вырез (40), связанный с каждым из упомянутых пальцев, и в котором упомянутый палец будет перемещаться.
Орган перемещения содержит также захватывающий орган (31), который имеет открытое положение и закрытое положение. Направляющий орган (30) и захватывающий орган (31) взаимодействуют таким образом, что:
когда захватывающий орган (31) находится в открытом положении, каждый палец может быть вставлен в вырез (40) или извлечен из него,
когда захватывающий орган (31) находится в закрытом положении, каждый палец может осуществить только ограниченное перемещение в упомянутом вырезе между положением, называемым «нижним», соответствующим контакту с упомянутым захватывающим органом, и положением, называемым «верхним».
Пневматический силовой цилиндр играет роль приводной системы (311), соединенной с захватывающим органом, выполненной с возможностью его перемещения между открытым и закрытым положениями.
Поворотная собачка (320) L-образной формы является подвижной деталью блокирующей системы (32). Она имеет заблокированное положение и разблокированное положение и выполнена с возможностью блокирования захватывающего органа (31), когда он находится в заблокированном положении. Поворотная ось (322) упомянутой собачки находится, по существу, на пересечении двух ветвей L, при этом первая ветвь (321) L, по существу, горизонтальная, предназначена для вхождения в контакт с упомянутым пальцем, когда он перемещается из своего нижнего положения в свое верхнее положение, и для привода упомянутым пальцем, заставляя поворачиваться собачку в положение разблокировки. Вторая ветвь (325) L, по существу, вертикальная, выполнена с неровностью, которая, когда собачка находится в заблокированном положении, взаимодействует с частью рельефа (313) захватывающего органа (31)таким образом, что она препятствует любому движению упомянутого захватывающего органа, независимо от его начального положения, открытого или закрытого: его нижняя стенка (324) образует упор при закрывании, а его верхняя стенка (323) образует упор при открывании.
Когда орган (300) перемещения снабжен соединителем и перемещается для того, чтобы разместить его на опорных крюках анодной рамы, собачка (320) находится в блокированном положении и блокирует захватывающий орган (31) в закрытом положении, запирая пальцы соединителя. Благодаря гравитации пальцы находятся в нижнем положении в контакте с захватывающим органом (фиг. 4d). Поднятый над опорными крюками орган перемещения опускается для того, чтобы пальцы оказались на упомянутых опорных крюках. При продолжении опускания захватывающего органа пальцы перемещаются и достигают их верхнего положения, где, войдя в контакт с горизонтальной частью собачки, они поворачивают упомянутую собачку, переводя ее из положения блокировки в положение разблокирования (фиг. 4с), позволяя, таким образом, захватывающему органу перемещаться в его открытое положение (фиг. 4b), при этом перемещающий орган освобождается от соединителя, который он перемещает (фиг. 4а).
Когда орган (300) перемещения пуст и перемещается для того, чтобы захватить соединитель, покоящийся на опорных крюках анодной рамы, и извлечь его из этого положения, захватывающий орган удерживается в открытом положении. Подходя сверху к соединителю (фиг. 4а), который размещается на опорных крюках, орган перемещения опускается для того, чтобы пальцы вошли в упомянутые вырезы и достигли своего верхнего положения (фиг. 4b), где, войдя в контакт с горизонтальной частью собачки, они поворачивают упомянутую собачку, заставляя ее перейти из заблокированного положения в ее разблокированное положение, позволяя, таким образом, захватывающему органу переместиться из его открытого положения в его закрытое положение для запирания упомянутых пальцев (фиг. 4с). Орган перемещения затем поднимается так, чтобы пальцы перешли в нижнее положение, соответствующее контакту с захватывающим органом. Продолжая подъемное движение, соединитель захватывается захватывающим органом, при этом пальцы находятся на упомянутом захватывающем органе (фиг. 4d).
Привод (34) заставляет перейти блокирующую систему (32) из ее разблокированного положения в ее заблокированное положение, когда палец не находится в верхнем положении. Упомянутым приводом является пружина (340), связывающая неподвижную точку органа перемещения с точкой, по существу, вертикальной ветви L. Жесткость пружины достаточно мала для того, чтобы собачка могла поворачиваться, когда палец приходит в контакт с, по существу, горизонтальной частью.
Захватывающий орган (31) содержит два поворотных фланца, каждый из которых соединен с пальцем и приводится силовым цилиндром для перехода из открытого положения в закрытое положение и наоборот. Упомянутые фланцы поворачиваются вокруг оси (302). Они имеют С-образный контур с рельефом (313) типа штыря, который взаимодействует с верхней стенкой (323) и нижней стенкой (324) собачки и с выступом (314), который образует препятствие на входе в вырез, когда упомянутый захватывающий орган находится в закрытом положении. Выступ (314) имеет впадину (312) выполненную с возможностью образования посадочного места, в котором может находиться палец.
ПРИМЕР 2 (фиг. 5a-5d)
Второй пример отличается от первого примера, в основном, собачкой (320'). Последняя также является поворотной собачкой L-образной формы с очень короткой, по существу, вертикальной ветвью, связанной с пружиной сжатия (340'), и, по существу, горизонтальной ветвью, снабженной выемкой, имеющей упорную стенку (323') для открывания, и снабженной на своем конце упорной стенкой (324') для закрывания.
Штифт (313') фланца (310') захватывающей системы (31) взаимодействует с упомянутой упорной стенкой при открывании для удержания блокирующей системы (31) в заблокированном положении, при этом упомянутый фланец блокирован в закрытом положении. Штифт (313') взаимодействует с упомянутой упорной стенкой (324') при закрывании для удержания блокирующей системы (31) в положении блокировки, при этом фланец (310') захватывающей системы заблокирован в открытом положении.
ПРИМЕР 3 (фиг. 6а-6d)
Третий пример отличается от первого примера также собачкой (320''). Последняя не является поворотной: она перемещается вертикально, направляемая скользящей связью (322''). Ее верхний край связан с пружиной сжатия (340''), которая стремится ее толкать в нижнее положение, в котором упорная стенка (323'') для открывания и упорная стенка (324'') для закрывания взаимодействуют со штифтом (313'') фланца (310'') подобно деталям, описанным в предыдущем примере.
ПРИМЕР 4 (фиг. 7a-7d)
Четвертый пример отличается от предыдущих примеров более компактной формой фланцев (310''') захватывающей системы (31). Собачка (320''') является поворотной. Пружина сжатия (340''') стремится ее толкать в нижнее положение, в котором упорная стенка (323''') для открывания и упорная стенка (324''') для закрывания взаимодействуют со штифтом (313''') фланца (310''') подобно деталям, описанным в предыдущих примерах 2 и 3.
В этом примере перемещения фланцев (310''') захватывающей системы (31) менее пространны, посадочное место (312''') для пальцев меньше, но соответствующий выступ (314''') позволяет поймать упомянутые пальцы в вырез.


Изобретение относится к органу перемещения соединителя анодного стержня с анодной рамой электролизера для производства алюминия электролизом расплава, имеющего два боковых пальца для взаимодействия с опорными крюками, жестко соединенными с упомянутой анодной рамой, и расположенными с обеих сторон анодного стержня для прижима анодного стержня к анодной раме. Орган перемещения содержит направляющий орган с вырезом, соединенным с каждым из пальцев и предназначенным для приема пальцев, захватывающий орган с открытым и закрытым положениями, причем упомянутые направляющий орган и захватывающий орган взаимодействуют с обеспечением возможности введения каждого пальца в вырез и выведения из выреза в открытом положении захватывающего органа и возможности ограниченного перемещения каждого пальца в упомянутом вырезе между нижним положением, соответствующим контакту с захватывающим органом, и верхним положением при закрытом положении захватывающего органа, автономную приводную систему, соединенную с захватывающим органом с возможностью его перемещения между открытым и закрытым положениями, и блокирующую систему с заблокированным и разблокированным положениями для блокирования захватывающего органа в ее блокированном положении с возможностью перехода из блокированного положения в разблокированное положение в верхнем положении пальцев. Раскрыты блок подъема и перемещения анода и применение органа и блока перемещения в электролизном цехе для получения алюминия электролизом расплава. Обеспечивается повышение надежности подъема и перемещения анодов алюминиевого электролизера. 4 н. и 10 з.п. ф-лы, 7 ил., 4 пр.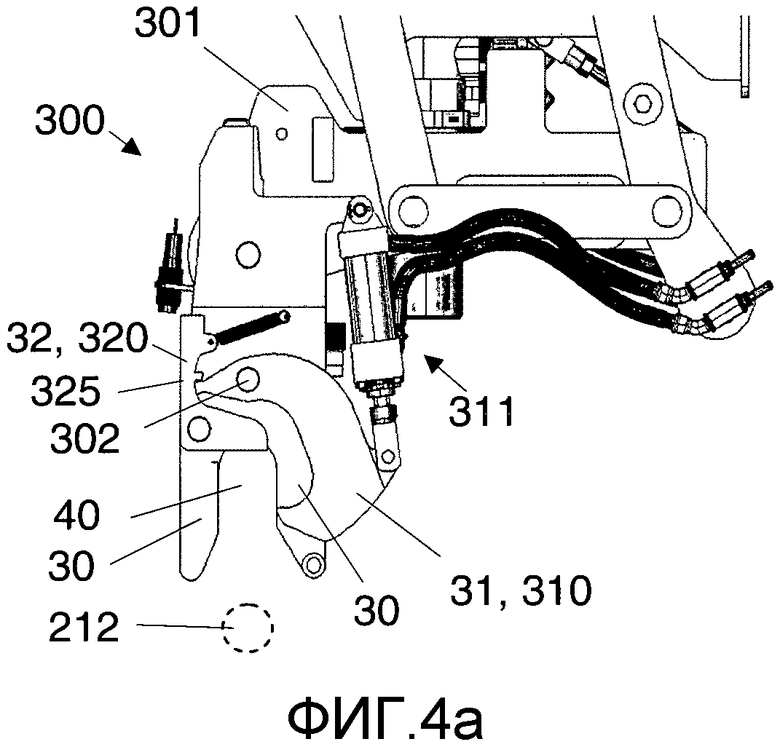
1. Орган перемещения (300) анодного соединителя (200) для соединения анодного стержня на анодной раме (5) электролизера (1) для производства алюминия электролизом расплава, упомянутый соединитель имеет два боковых пальца (212, 212'), выполненные с возможностью взаимодействия с опорными крюками (10, 10'), жестко соединенными с упомянутой анодной рамой и расположенными с обеих сторон анодного стержня (9) для прижатия упомянутого анодного стержня к упомянутой анодной раме, содержащий, по меньшей мере, один направляющий орган (30) с вырезом (40) для приема упомянутого пальца, отличающийся тем, что он содержит:
- по меньшей мере, захватывающий орган (31), имеющий открытое положение и закрытое положение, причем упомянутый направляющий орган и упомянутый захватывающий орган взаимодействуют с возможностью введения каждого пальца в вырез или выведения из него при открытом положении упомянутого захватывающего органа и ограниченного перемещения в упомянутом вырезе между нижним положением, соответствующим контакту с упомянутым захватывающим органом, и верхним положением при закрытом положении упомянутого захватывающего органа,
- приводную систему (311), соединенную с упомянутым захватывающим органом и выполненную автономной с возможностью перемещения последнего между упомянутыми открытым и закрытым положениями независимо от положения упомянутых пальцев относительно вырезов;
- по меньшей мере, блокирующую систему (32), имеющую заблокированное и разблокированное положения, выполненную с возможностью блокирования упомянутого захватывающего органа в ее заблокированном положении и с возможностью перехода из заблокированного положения в разблокированное положение в верхнем положении упомянутых пальцев.
2. Орган по п.1, отличающийся тем, что упомянутая блокирующая система содержит подвижную деталь (320, 320', 320'', 320'''), способную перемещаться между двумя положениями: положением разблокирования, когда упомянутый захватывающий орган свободен в перемещении, и положением блокирования, когда упомянутая подвижная деталь препятствует перемещению упомянутого захватывающего органа, причем упомянутое положение разблокирования обеспечивается посредством подвижной детали, при ее вхождении в контакт с пальцем (212) и захвате упомянутым пальцем при его ходе в верхнее положение.
3. Орган по п.1 или 2, отличающийся тем, что он содержит привод (34) для обеспечения перехода блокирующей системы из ее разблокированного положения в ее заблокированное положение, когда палец не находится в верхнем положении.
4. Орган по п.3, отличающийся тем, что упомянутый привод представляет собой упругое средство в виде пружины сжатия (340, 340', 340'', 340'''), жесткость которого достаточно мала для приведения в движение подвижной части упомянутой блокирующей системы упомянутым пальцем при его движении в его верхнее положение.
5. Орган по п.1 или 2, отличающийся тем, что упомянутый захватывающий орган (31) содержит два фланца (310, 310', 310'', 310'''), каждый из которых соединен с пальцем (212, 212').
6. Орган по п.1 или 2, отличающийся тем, что он содержит два блокирующих устройства, каждое из которых соединено с пальцем.
7. Орган по п.1 или 2, отличающийся тем, что упомянутый захватывающий орган (31) перпендикулярно оси поворота имеет контур, содержащий рельеф (313, 313', 313'', 313'''), который взаимодействует с упомянутой блокирующей системой и выступом (314, 314'''), образующим препятствие на входе в вырез (40), при нахождении упомянутого захватывающего органа в закрытом положении.
8. Орган по п.7, отличающийся тем, что упомянутый выступ имеет впадину (312), выполненную с возможностью образования посадочного места для размещения пальца (212).
9. Орган по п.1 или 2, отличающийся тем, что упомянутая приводная система (311) выполнена в виде пневматического силового цилиндра, содержащего шток, два крайних положения хода которого соответствуют упомянутому открытому положению и упомянутому закрытому положению.
10. Орган по п.7, отличающийся тем, что упомянутая подвижная деталь (320, 320', 320'', 320''') блокирующей системы (32) имеет стенку (323, 323', 323'', 323'''), препятствующую перемещению упомянутого рельефа (313, 313', 313'', 313''') захватывающего органа (31), обеспечивающего возможность перехода из закрытого положения в открытое положение при нахождении упомянутой подвижной детали в блокирующем положении.
11. Орган по п.7, отличающийся тем, что упомянутая подвижная деталь (320, 320', 320'', 320''') блокирующей системы (32) имеет стенку (324, 324', 324'', 324'''), препятствующую перемещению упомянутого рельефа (313, 313', 313'', 313''') захватывающего органа (31), обеспечивающего возможность перехода из закрытого положения в открытое положение при нахождении упомянутой подвижной детали в блокирующем положении.
12. Блок подъема и перемещения (20) для подъема и перемещения анодов при замене отработанных анодов новыми анодами, содержащий, по меньшей мере, орган перемещения соединителей (200) по одному из пп.1-11.
13. Применение органа перемещения (300) соединителей анодных стержней с анодной рамой по одному из пп.1-11 при замене отработанных анодов новыми анодами на заводе по производству алюминия электролизом расплава.
14. Применение блока подъема и перемещения для подъема и перемещения анодов при замене отработанных анодов новыми анодами по п.12 на заводе по производству алюминия электролизом расплава.

